
面向新工科的综合实训车开发
2021-12-14 09:20陈新兵龙晓莉谢斌盛胡维
中国教育技术装备 2021年18期
关键词:新工科
陈新兵 龙晓莉 谢斌盛 胡维
摘 要 针对电工电子实习教学工程案例的不足,开发面向新工科的综合实训车。整车以寻宝为主题开发,根据低年级学生特点采用模块化设计方案,由电源模块、传感模块、主控模块、驱动模块、车灯控制、蓝牙通信等部分构成,融入跨学科创新要素,并从系统结构、硬件设计、软件编程、协同仿真、资源构建等方面作了具体介绍。教学应用表明,该车满足了实习教学与课外创新需求,学生得到更系统的工程历练,综合实践与融合创新能力显著提升。
关键词 新工科;电工电子实习;综合实训车;Proteus
中图分类号:G642 文献标识码:B
文章编号:1671-489X(2021)18-0129-04
Development of Comprehensive Training Vehicles for New Engi-
neering//CHEN Xinbing, LONG Xiaoli, XIE Binsheng, HU Wei
Abstract For current teaching project cases can not work well with new engineering construction, comprehensive training vehicles are
developed for electrical and electronics practice. The vehicle is de-signed with treasures hunt as the theme, and composed of power module, sensor module, system board, driver module, lights control, Bluetooth communication, etc. According to the characteristics of
the junior students, interdisciplinary innovation elements are inte-grated progressively in teaching design. Furthermore, how to design
the vehicle is presented in the aspect of the system structure, hard-ware design, software programming, cooperative simulation and
resource construction. The teaching application shows that the vehi-
cle gives students a more systematic engineering experience, signifi-cantly improve their practical innovation ability, meets the needs of practical teaching reform and extracurricular innovation.
Key words new engineering; electrical and electronics practice; comprehensive training vehicle; Proteus
0 前言
新一輪科技革命和产业变革,需要大批高素质复合型新工科人才。新工科强调电子控制、信息通信、软件设计、人工智能等跨学科创新要素与传统工业技术的融合,拓宽了专业视野,释放了创新活力,为实践课程教学改革与新工科人才培养提供了指导[1-2]。
电工电子实习是工科专业低年级学生的基础实训环节,长期以来侧重培养实践动手能力的培养,综合应用与创新能力培养亟待加强。各高校提出的解决思路中[3-4],一部分强调课外创新,课堂教学仍以传统案例支撑,融入创新要素困难,难以带动课外创新;一部分缺乏系统级工程案例统领以形成分层次课堂,有违普及教育初衷,无法承载新工科建设重任。
广州大学在探索电工电子实习建设新工科示范课程的过程中,以系统级工程案例构建为突破口,统筹考虑实习教学对后续课程与课外创新的支撑,培养学生科研兴趣与降低课外创新门槛的设计,巩固基本电子技术与普及应用系统设计的方法,开发了实训教学车,立足实习教学,面向课外创新,探索在课堂学时有限的条件下进行新工科复合式人才培养。
1 实训车开发
电子控制系统是信息科技产业与其他行业自动化装备的核心,作为电工电子技术的综合应用,在新工科人才培养中占有重要地位。智能车是典型的电子控制系统,包含输入传感器、微控制器核心与输出执行器三个基本环节,扩展性强、创新元素多,是创意机器人设计的基础,也是全国智能汽车竞赛、机器人大赛、全国电子设计大赛与挑战杯的热门主题[5],广受师生欢迎,成为实践创新入门训练的理想题材。实习课程组根据新工科建设需求,采用科技竞赛成果转化的方式,为电工电子实习开发了综合实训车。下面从系统结构、硬件设计、容错设计、软件编程、协同仿真、资源建设五个方面进行介绍。
1.1 系统结构
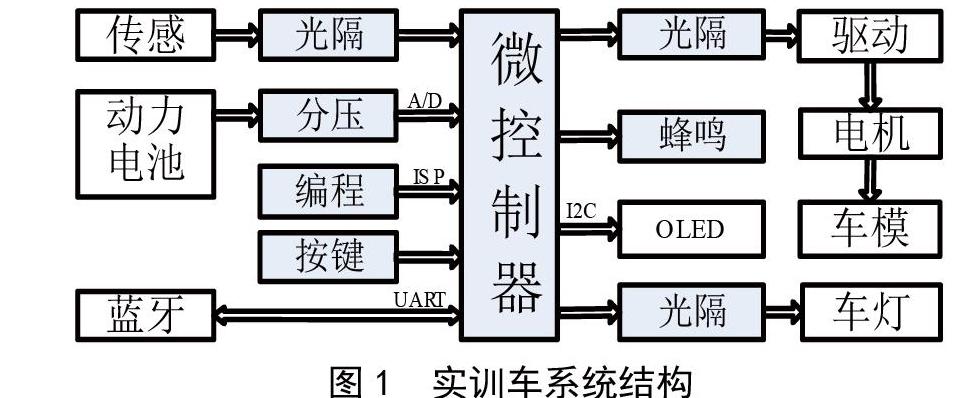
实训车以寻宝为主题设计,寻宝成功时以声光示意,沿规划路径抵达终点后自动停车,并发送比赛数据到裁判端。整车使用四驱差速底盘,有位置、速度与寻宝三个子系统,结构见图1。其中位置控制系统负责导航,引导实训车沿规划路径行进,由循迹传感、微控制器、驱动电路、电机与光隔电路组成。速度控制系统确保实训车快速平稳行驶,由电池电压检测、微控制器、驱动电路、电机与光隔电路组成。寻宝控制系统负责探测路面特定标识,实时发出声光提示,并将统计数据通过蓝牙通信发至裁判端,由光电传感、微控制器、蜂鸣电路与通信电路组成。主控模块是整个系统的指挥控制核心,图1中以灰底标示,由微控制器、光隔、ISP编程口、电池电压采集、调试按键、LED指示灯、蜂鸣电路与保护电路构成,为后续创意机器人设计预留了接口,决定了整个系统的功能、可靠性与拓展性。
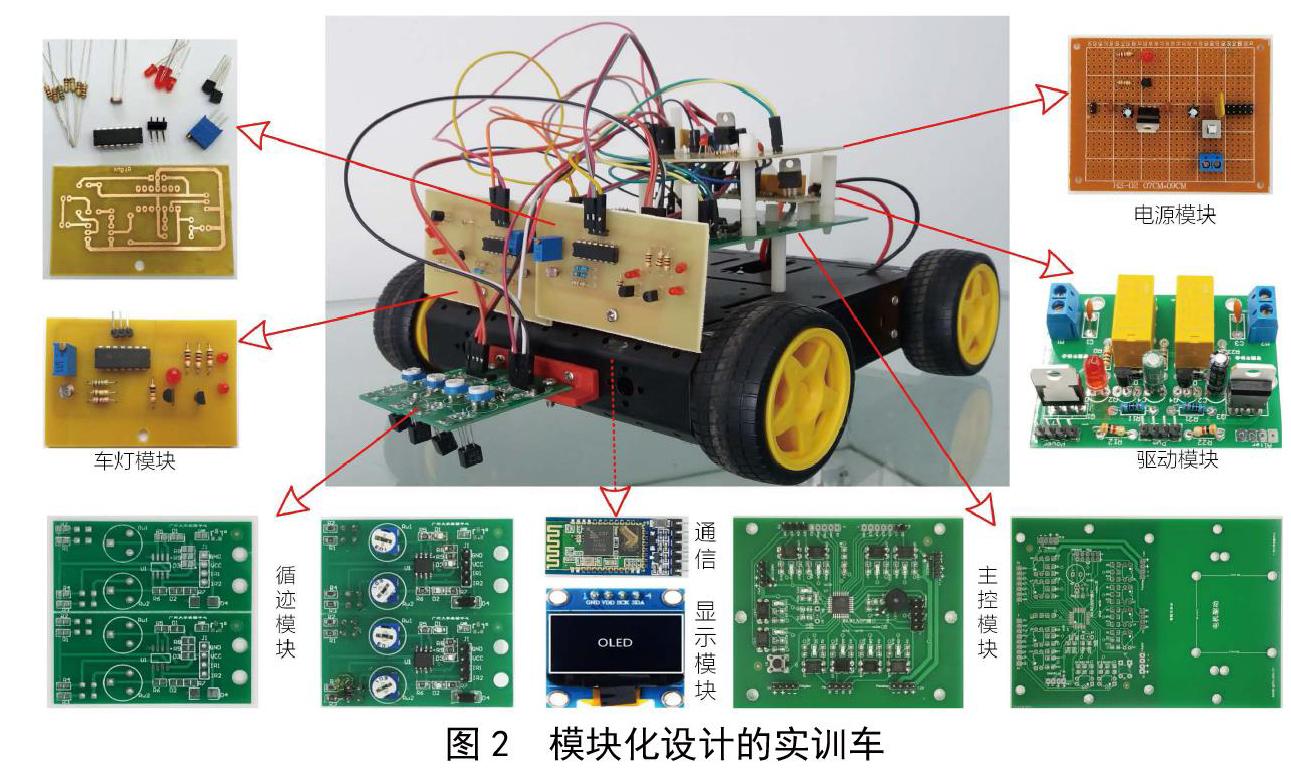
1.2 模块化设计
实训车硬件采用模块化设计方案,由电源模块、传感模块、主控模块、驱动模块、车灯控制、蓝牙通信、OLED显示、软件编程与结构设计等部分构成,各模块间采用杜邦线进行电气连接,如图2所示。
综合实训车,承载电子工艺实训、电子控制系统普及、电子技术典型应用与创新入门教育四项职能,课程组据此重组教学内容,优化知识结构,融合创新元素,统筹完成各个电路模块的开发。每个电路模块皆采用常见芯片设计,对应1~2项实训内容,达成工程能力培养目标,具体见表1。
1.3 软件编程
实训车软件编程有循迹、寻宝与恒速三大任务,其中恒速采用前馈控制方法,跑车过程中单片机不断检测电池电压,据此实时调节PWM输出占空比,使电机端电压为常数Vmo,确保电池电量下降时整车稳态速度基本不变。其中Vmo决定稳态车速,需要根据现场调试情况确定最佳速度,确保车跑得又快又稳。
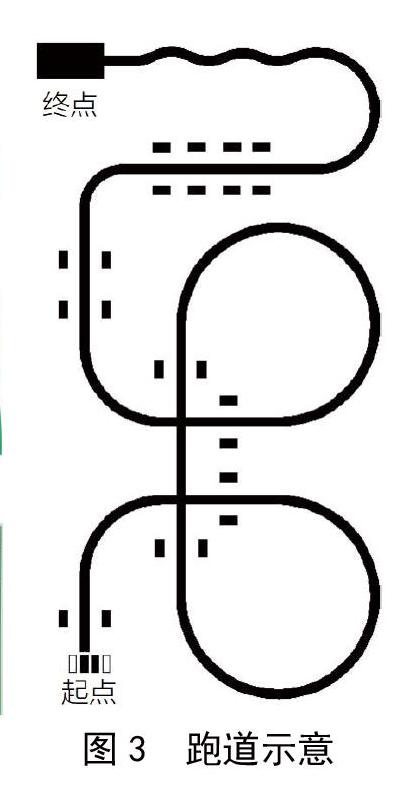
循迹任务与寻宝任务,共用车头安装的四路光电传感器检测路面元素,传感器呈线阵排列。传感器遇到黑色时输出0,四路传感存在16种检测结果,其中起跑线为1001、终点为0000、出界为1111、直行遇宝为0101或1010;
其他为循迹模式,引导实训车从起点出发,沿眼镜型黑色导航线跑完全程,在终点停车。跑道见图3。
软件流程见图4。微控制器须依次完成初始化、数据采集、数据处理、特征辨识、分类决策等一系列工作,具体编程仿真在Proteus虚拟环境下进行,成功后下载到实训车,进行现场调试。程序执行时,单片机通過循迹传感器检测车头在跑道的相对位置,输出相应的启停、调速、转弯信号,控制电机执行循迹任务;检测到跑道两侧的块状宝物时进入探宝模式,发出声光提示信号,并继续前进寻宝,直至到达终点自动停车;停车后将数据通过蓝牙发送到裁判端,寻宝越多而耗时越短者获得更好成绩。此外,认真分析十字路口与终点停车区异同,正确辨识二者,控好速度,方能实现精准停车。
1.4 协同仿真
实训车开发过程中引入Proteus软硬件协同仿真技术,所有电路模块的规划、设计、仿真与测试,皆在Proteus虚拟环境下完成,提高了开发效率[6]。其中循迹控制是整个系统的核心,确保实训车沿规划路径行驶,由循迹传感输入、电机驱动输出、微控制器及其程序构成,软硬件协同仿真效果见图5。
图5是车头右偏时的仿真效果,此时左转灯D17亮,左轮电机M1、M3后退,右轮电机M2、M4保持前进状态,二者转速相等,车辆实现原地左转,直至方向校正完成。具体执行过程为:四路循迹传感输入K1-K4=0111,说明路线在车头左侧,单片机感知后由PB0引脚输出高电平信号,经光耦U5隔离放大后,触发一系列动作,即三极管Q3开启→继电器RL2线圈通电→常开触点闭合→电机M1、M3反转→车辆原地左转,转速则由PB1输出的PWM占空比调节。这种软硬件协同仿真开发方法,已通过课件与例程等资源向学生普及,提升了学生的自主学习能力与创新设计能力。
1.5 资源建设
课程组以智能车/机器人设计为主线,重组教学内容,逐步融入跨学科创新元素,开发了系列实训项目,形成基础实训、专题培训与跨学科赛事等三个层次的教学资源,通过MOOC在线平台共享,满足不同专业年级学生随时随地学习的需要,持续提升学生的实践创新能力。
1.5.1 基础实训资源 涉及实训车硬件系统的设计、制作与调试,重在通过电子工艺训练普及电子控制系统设计,提升学生的实践动手能力与硬件系统开发能力,满足实习课堂教学需要。基础实训资源包括两种。
1)教学课件,包括“实习安排:智能车系统认知”“万用板与焊接训练:电源模块”“PCB板与贴片焊接:寻迹模块”“电路仿真:车灯模块”“PCB板设计:车灯模块”“PCB板焊接调试:车灯模块”“PCB板设计:驱动电路”“整车装配调试”。
2)典型环节教学视频,包括五步焊接法、PCB制作流程、SMT手工贴装、SMT自动贴装、典型电路调试、整车装配联调等。
1.5.2 专题培训资源 涉及实训车软件编程与扩展设计,重在通过实训车的完整实现普及其他跨学科创新元素应用,提升学生将创意转化为作品的工程能力,满足部分专业课堂教学与课外实践创新的需要,资源包括GPIO&ADC数据采集、GPIO开关控制、PWM电机控制、循迹寻宝算法、蓝牙通信、智能车整机联调、OLED显示、蓝牙物联APP开发、固定支架设计、3D打印、人工智能应用等例程与课件。
1.5.3 跨学科赛事资源 涉及为智能硬件相关赛事创设的系列创新训练项目,重在指导学生以实训车为基础,课外进行创意机器人设计,备战中国机器人大赛等跨学科赛事,提升学生的多元协同融合创新能力,检验师生课赛结合协同发展的阶段成果。
2 应用效果
广州大学电子实习中心承担全校13个专业的电工电子实习教学任务,经过三年的完善,第二代实训车已用于电子、光电、电信、物联、电气、自动化、通信等专业的实习教学,为实习提供了系统级工程案例、系列实习项目、优质教学资源、多学科融合创新元素、较复杂工程问题与课外创新平台,满足了实习教学的需求,成为新工科课程建设以及课赛协同发展路径的基石。实习采用停课一周集中实践的教学方式,大一下学期或大二上学期开课,学生两人一组,课堂合作完成实训车硬件设计、制作、调试与循迹,课外编程实现寻宝任务;在此基础上进行创意机器人设计,参加校内选拔挑战赛,引领跨学科科技活动,现已成为学校创新创业平台的练兵场与孵化地,如图6所示。
通过综合实训车,实习中心现已建成以实习为起点,涵盖跨学科赛事及其课外培训的校级创客平台,施行半开放管理制度,成立了智能车协会协助开放管理和课外培训,形成了课赛训结合的持续培养模式。近三年组织学生参赛获省级以上大奖70余项,在创新人才培养模式、培养科研兴趣、多学科融合创新、营造科创氛围等方面取得显著成效,经过历练的学生的工程实践能力、持续发展能力与创新应用能力普遍提升,有力支撑了后续的课程设计、综合设计实验与课外科创活动,并于2019年助力广州大学成为广东省大学生创新创业教育示范学校。
3 结语
根据新工科理念开发的实训车,立足实习,面向课外创新,形成了课赛协同发展的创客平台,普遍提升了广州大学学生的工程实践能力与融合创新能力,成为省级创新创业平台的重要支撑,为其他高校建设新工科课程提供了参考案例。■
参考文献
[1]王海舰,袁嘉惠,吴立韬,等.“新工科”建设背景下的学科交叉融合机制研究与探讨[J].课程教育研究,2019(12):
7-8
[2]马鹏举,邱玉婷,崔剑,等.面向“新工科”“双一流”建设的工程训练系统性改革[J].实验技术与管理,2020,
37(1):220-224.
[3]夏慧雯,徐少华,明宏,等.基于新工科的电工电子实习教学改革与探索[J].电子世界,2019(12):48-49.
[4]张春梅,杨荣,赵军亚.融合三创教育的电子工艺实习教学改革与实践[J].高校实验室科学技术,2019(3):3-6.
[5]漆强,刘爽.新工科背景下“光机电算一体化”挑战性实验课程的设计[J].实验技术与管理,2018,35(11):217-220.
[6]陈新兵,胡维,龙晓莉.基于Proteus的直流电机控制教学探索[J].中国教育技术装备,2020(10):31-33.
猜你喜欢
科教导刊·电子版(2017年28期)2017-11-22
科技视界(2017年21期)2017-11-21
科技视界(2017年22期)2017-11-21
东方教育(2017年17期)2017-10-31
电脑知识与技术(2017年22期)2017-10-26
东方教育(2017年15期)2017-10-19
中国管理信息化(2017年14期)2017-09-20
中国大学教学(2017年5期)2017-09-05
计算机教育(2017年8期)2017-09-01
科技视界(2017年10期)2017-08-21
