微动技术在城市地下病害体探测中的应用研究
2021-12-13 04:48蔡祖华刘宏岳郑金秋林朝旭黄佳坤
工程地球物理学报 2021年6期
蔡祖华,刘宏岳,郑金秋,林朝旭,黄佳坤,
殷 勇1,2,3,张红梅1,林孝城1
1 引 言
近年来城市地下病害体问题日益突显,道路塌陷事故时常发生,严重影响了城市交通安全和居民日常生活。2018年10月1日颁布实施的住建部行业标准《城市地下病害体综合探测与风险评估技术标准》,总结推荐了近年探测城市地下病害体的地球物理方法。城市地下病害体勘探条件非常复杂,因为人类活动中的各种机械振动、城市中的强电磁波干扰、复杂的城市空间与地表条件及高精度要求等多重因素均影响着各种探测方法的开展,导致不同的探测方法要求的实施条件不同,如探地雷达要求避开强电磁干扰。而微动勘探技术不受强电磁的干扰,其震源为被动源,利用了自然界各种活动产生的震动(如:空气流动、火山活动、板块运动、潮汐活动等)和人类的各种活动(如:汽车、火车、机械活动等)。这些震动的频率从零点几赫兹到几千赫兹不等,微动勘探利用所有这些震动能量产生的波来探明地下病害体。因此在复杂地表与特殊环境下,微动勘探技术是一种更加便捷有效的无损探测技术。
微动勘探的历史比较久,早在20世纪50年代,日本学者Aki(1957年)使用空间自相关法(SPAC,Spatial Autocorrelation)首次从微动信号中提取出了面波频散曲线;1969年,Capon提出了新的方法(HRFK,High Resolution Frequency Wavenumber Method),并成功地定位了核实验场位置和地震震源位置。随后,尤其在最近的20年中,由于硬件计算能力的不断提升和软件技术的发展,微动勘探分析方法在城市工程中的应用得到了很大的发展。为了提高微动勘探在地下城市病害体的解释精度,本文将微动勘探技术中地层多个相关属性(如:H/V谱比曲线、频散曲线、相速度剖面等)进行综合解释,结果表明,多种相关属性综合解释能够有效避免单一属性判别的误判,该种微动技术分析方法能够适应复杂的城市环境,在城市地下病害体工程中是一种有效的探测手段[1,6]。
2 微动勘探技术简介
2.1 基本原理
微动探测方法是以平稳随机过程理论为依据,从微动信号中提取面波(瑞利波)的频散曲线[7],通过对频散曲线进行反演,最终通过横波速度的差异来解释地下结构。
微动具有如下基本特征:
1)地球表面无论何时何地都存在震动;
2)动源的空间分布、触发时间及源的强度是随机的;
3)在某一固定的位置,波的到来方向一般不确定;
4)频率一般较低;
5)微动探测中携带有面波所固有的频散信息。
2.2 微动勘探技术优势
1)不受城市市区场地空间与地表条件影响。
2)微动探测对环境无特殊要求。且利用通常概念的“噪音”作为测试信号,市区提供丰富的高频信号源(经过测点附近的重型载重车辆除外)。
3)微动勘探不需要人工激发的震源。
4)地层横向的速度变化极其敏感,对探测病害体有方法本身的优势[8]。
5)微动探测与少量钻孔结合,可以较准确地解释地下结构的二维剖面。
3 数据分析与处理方法
3.1 处理流程
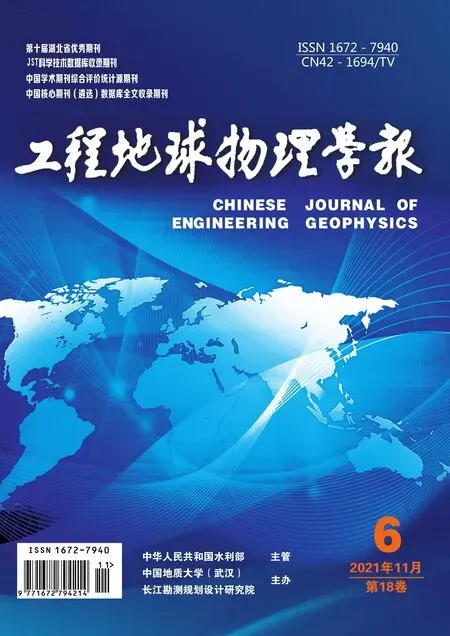
微动勘探勘探方法的一般流程与主动源方法相似,即有三大步骤,数据采集(观测台阵)、数据处理(提取频散曲线、H/V曲线)和成果解释(频散曲线反演)(见图1和图2)。
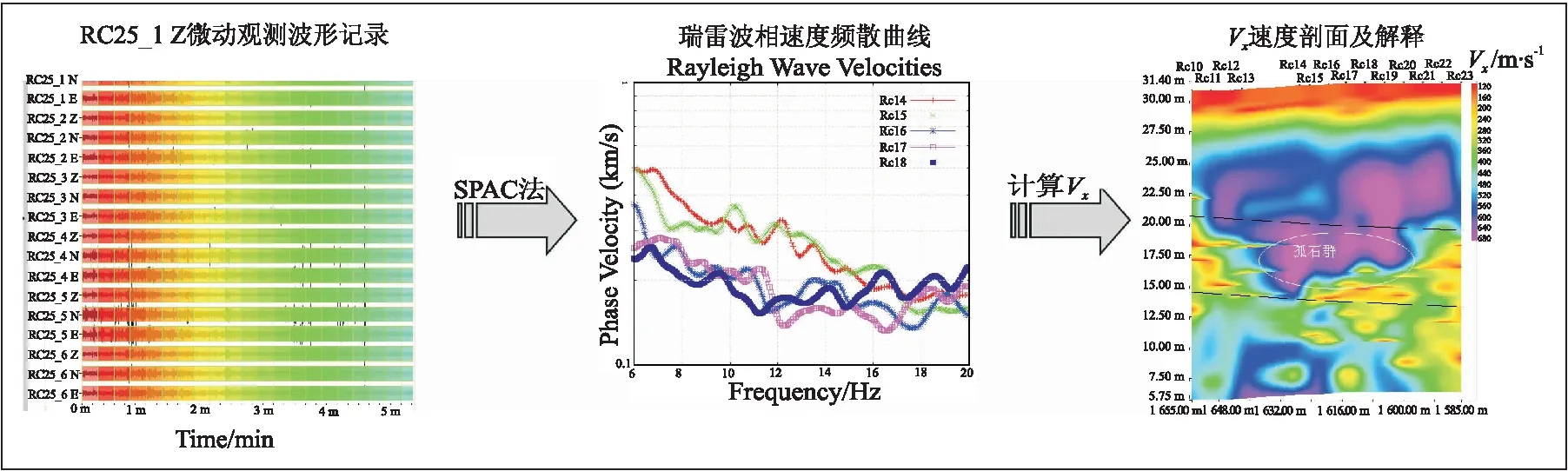
图1 速度剖面获取流程Fig.1 Flow chart of velocity profile acquisition

图2 H/V曲线获取流程Fig.2 The H/V curve acquisition flow chart
3.2 数据处理方法
根据微动观测台阵信号反演场地速度结构,包括两个主要方面:一是从微动观测记录中提取频散曲线;二是利用频散曲线反演场地相速度结构[9]。微动数据处理中,频率波数法与H/V谱比法是主要的方法。
3.2.1 高分辨率频率波数法(HRFK)
传统F-K法(CVFK,Conventional Frequency Wavenumber Method)的具体实现的步骤为,首先将实测数据分为若干段,选择有效的数据段;接着对各个方向上的信号进行二维傅里叶变换后得到频散谱;然后将所有方向的频散谱进行叠加,获得所有的频散总谱,最终提取出频散曲线。而高分辨率频率波数变换(HRFK)采用的是Capon(1969年)的算法,是一种基于广义波束聚焦的自适应复空间加权算法,该算法广泛应用于分析窄频带平稳信号的频率波数域分析。其功率谱P为:
(1)
其中,(xi,yi)为观测x点坐标;kx,ky为波数矢量;φij(ω)为各个点之间信号相关性构成的矩阵的逆矩阵的元素[9]。通过ω的选择,HRFK使波数不同于优势信号的互功率谱能量最小化实现分辨率的提高[10]。
3.2.2 H/V谱比法
首先由Nogoshi和Igarashi提出,经Nakamura推广应用于场地响应评估[11]。H/V值使用单台水平、垂直分量频谱相比得到,利用面波H/V曲线使用了最大似然估计法进行反演,防止数据发散,得出测点下地层的结构参数。在水平层状介质中,频率为ω的微动面波H/V谱比可定义为:
(2)
其中,PNS(ω)和PEW(ω)为水平运动傅里叶功率谱;PUD(ω)为垂直运动傅里叶功率谱[12]。
4 城市地下病害体探测工程应用
4.1 探测工程案例·马路沉降坍陷
4.1.1 工程概况
本次工程物探工作采用无损的微动探测技术,在委托方指定的已发生地面沉降区域开展微动探测工作,以探明引起地面沉降不良地质体的平面位置、埋深以及分布范围,为盾构法施工提供地质依据。
本区间场地沿线勘探深度范围内地层主要为杂填土、黏土、淤泥、淤泥中细砂交互层、淤泥夹砂、(含泥)粉细砂、(含泥)中砂、(含细砂)粉质黏土、(含泥) 粗中砂、卵石(砂质填充)、强风化花岗岩(砂土状)、中风化花岗岩。场地各土层在水平方向上的分布及性质不均匀,在垂直方向土层软硬相间,均匀性差。
4.1.2 微动探测成果解释
本次探测总长度为48.0 m;各微动测点平面位置见图3,通过数据处理,对比分析钻孔资料,对本工程各微动剖面进行分析与解译,最终获得成果解释图。
以单点M5为例,如图4可以看到异常区中M5点所得H/V曲线图中高频部分杂乱且多峰值;由此反应出此处浅层土层松散,结构可能已经遭到破坏。

图4 M5台阵测点H/V曲线Fig.4 The H/V curve of M5 arrayobservation points
L1段(图5,图6)测点的H/V曲线多为尖单峰形态,为突出异常,本次H/V成果图用V/H成果图代替。由图5所示的V/H等值线图可知,测点M4与M5在4.0~45.0 Hz频率段出现多个量值较大区域,反映地表下方存在多个地层阻抗界面;由图6所示的相速度等值线图可知,测点M3至M6段在10.0~19.0 Hz与31.0~55.0 Hz(深度约3.9~16.9 m)发现2个明显的低速软弱层;软弱层的存在易引起地面沉降。而根据现场踏勘可知,测点M4与M5附近区域已出现过沉降,并已注浆处理过,可从侧面验证此次结果正确。

图5 L1测线V/H等值线Fig.5 The V/H contour map of L1 survey line

图6 L1测线面波频率-相速度等值线Fig.6 The contour map of surface wave frequencyandphase velocity of L1 survey line
综上所述,根据速度成果剖面与H/V等值线图显示,沉降区域剖面下方浅部低速层厚度呈两端薄中间厚,这与沉降监测结果显示的两端沉降小中间沉降大的情况存在对应关系;勘察资料显示结构底板下方土层基本为中砂(砂层中局部夹薄层淤泥质土),也验证该范围中砂土体结构较松散。
4.2 探测工程案例·某车站明挖区沉降
4.2.1 工程概况
某工程对车站净空断面进行测量,测量后发现东明挖区间出现局部标高整体下沉,最大下沉约23 cm,西明挖区间和车站并未出现下沉。东明挖区间与车站交界位置横向裂缝一条。图7的裂缝长度约8 m,宽度约2~3 mm,深度2~4 cm。

图7 东明挖区与车站交界处裂缝照片Fig.7 The cracks at the junction of dongming excavation and station
东明挖区沉降区域上方目前已铺设铁轨,如图8铁轨高出钢筋混凝土结构底板约1 m,铁轨下方与结构底板之间已完成部分钢筋绑扎,但未浇筑混凝土。勘察资料显示,东明挖区结构底板持力层为中砂,局部存在薄层淤泥质土。

图8 现场照片Fig.8 The scene photos
为了查明东明挖区沉降区域下方土层情况,采用物探方法进行探测,由于现场施工条件较差,环境复杂,存在各种干扰因素,导致电法类的物探方法无法开展工作(包括可以探测浅部土层结构的探地雷达);而采用的微动探测技术,以天然震动为震源,不受各种金属干扰,可以灵活采用适应现场环境特点的台阵类型,克服较差的施工条件,并且综合使用面波相速度和H/V两个参数进行成果分析,能够达到较高的解释精度。
本次现场微动台阵布置每个台阵含6个检波器,分别在两根铁轨下方结构底板上各安放3个检波器(T1~T6为检波器安放位置)。完成一个台阵的测试后,台阵整体往前移动6 m,继续下一个台阵的测试。
4.2.2 微动探测成果解释
微动探测成果的解释主要基于面波相速度和H/V两个参数,面波相速度的高低直接反映土层的软硬程度,H/V曲线的峰值反映土层中的阻抗界面,也是划分土层分界面的依据之一[9]。
4.2.3 下行线XK29+572~XK29+770探测成果分析:
图9为下行线XK29+572~XK29+770里程段的面波频率相速度剖面图,横坐标为里程,纵坐标为频率,高频部分反映地下浅部的土层信息,低频部分反映地下深部的土层信息,不同颜色代表不同相速度值,相速度值大小参照右侧色标柱。图中黑色曲线为速度值约为200m/s的等值线。图中将频率按探测深度为半波长的关系转换为标高。

图9 下行线XK29+572~XK29+770面波频率-相速度剖面Fig.9 The cross section of XK29+572 ~ XK29+770 surfacewave frequency-phase velocity
图10为下行线XK29+572~XK29+770面波深度-相速度剖面图,从图10中可以看出:

图10 下行线XK29+572~XK29+770面波深度-相速度剖面Fig.10 The lower line XK29+572 ~ XK29+770 Surface wave depth-phase velocity profile
1)面波相速度为200 m/s的等值线形态基本为两端浅中间深,这与沉降监测结果显示的两端沉降小中间沉降大(沉降最大的位置为XK29+675附近)的情况存在对应关系;
2)XK29+675为中心的区域附近低速层厚度相对较大,往大里程和小里程方向低速层厚度变小,勘察资料显示东明挖区结构底板持力层为中砂,推断该范围中砂土体结构较松散;
3)剖面局部较深的区域存在高速异常为未知障碍物或者地质体,推断与沉降不存在直接关系。
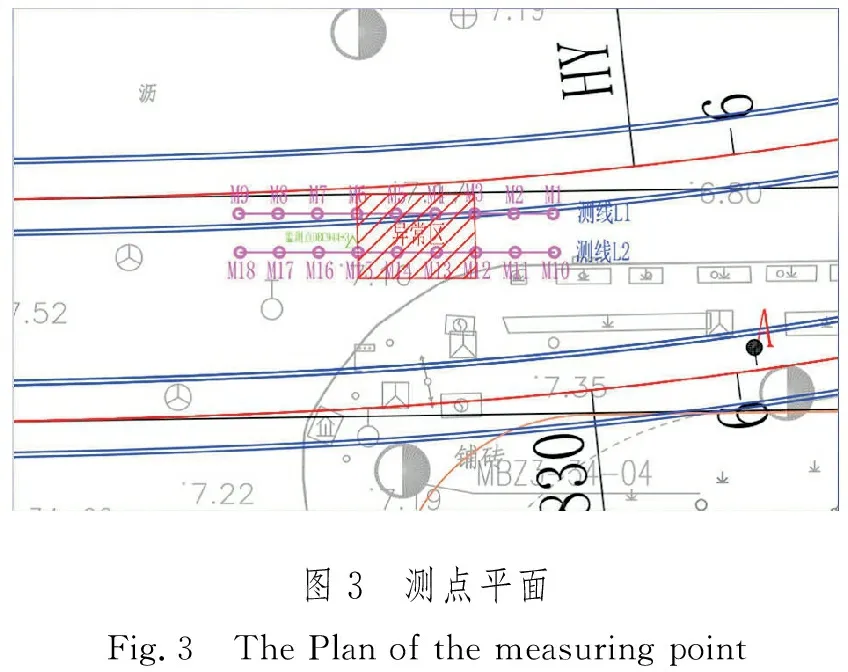
图11为Z9台阵测点的H/V曲线图,横坐标为频率,高频部分反映地下浅部的土层信息,低频部分反映地下深部的土层信息,纵坐标为H/V的量值,一般频率较低的最大峰值对应基岩面,频率较高的其他峰值对应基岩面以上土层中的其他阻抗界面。从图11中可以看出:
图11 Z9台阵测点H/V曲线Fig.11 The H/V curve of measuring points of Z9 array
1)频率1.22 Hz处的峰值对应基岩面;
2)频率30~80 Hz范围内存在多个峰值且峰值杂乱,表明这个深度范围内土层极不均匀,结合勘察资料推断结构底板下方中砂土体结构遭到破坏,上覆土层的平均速度按200 m/s估算,对应埋深范围在1~3 m左右。本剖面中其余台阵测点的H/V曲线均存在类似情况。
图12为下行线XK29+572~XK29+770段H/V等值线图,横坐标为距离,纵坐标为频率,高频反映浅部信息,低频反映深部信息,不同颜色代表不同的H/V量值,量值大小参考右侧色标柱,H/V曲线的峰值反映土层中的阻抗界面。图中黑色实线到100 Hz的频率范围内均存在多个峰值,且峰值杂乱的情况,上覆土层的平均速度按200 m/s估算,对应埋深范围在1~3 m,推断本剖面下方均存在中砂土体结构遭到破坏的情况。

图12 下行线XK29+572~XK29+770段H/V等值线Fig.12 The H/V contour map of lower line XK29+572 ~ XK29+770
综上两个工程案例可以得到,从微动探测方法上看,S波速度差异可以由计算的视S波速度剖面反映。波阻抗差异可以由测点的H/V曲线定性反映出来。由于病害体的大小不等,单一的速度参数推断病害体范围会有一定的误判;增加H/V参数可以提高病害体判别的准确度。
根据以上病害体的地球物理特征及S波剖面和H/V曲线的解释原则,可以将测试结果的大致分为两大类来分析,见表1。

表1 测试成果分类Table 1 Classification of test yesults

续表1
因此对于病害体判断而言,应关注H/V曲线的峰值频率f0和幅值A0,通过H/V曲线结合频散曲线反演计算分层速度结构,同时特别关注H/V类型中双峰型、多峰型、后台阶型及前台阶型的微动测点。
5 结 论
本文把微动勘探技术应用于城市病害体检测中得出以下结论:
1)微动勘探技术在针对城市场地条件复杂,场地狭小,要求精度高等特点,从野外观测方式到室内资料处理整个过程,均提供了较好的解决方案。
2)利用微动多参数属性,综合分析对地层进行划分,可提高资料的解释精度和准确度。并给出了S波剖面和H/V曲线的对应病害体的地球物理特征基本解释原则。
3)本文仅阐述了微动技术对地面沉降与马路塌陷方面的应用。随着微动技术在城市病害体中的进一步应用,在城市病害体的检测中会发挥越来越重要的角色。
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
地震研究(2021年1期)2021-04-13
——工程地质勘察中,一种做交叉剖面的新方法
中国设备工程(2021年2期)2021-01-28
石油地球物理勘探(2020年5期)2020-10-17
雷达学报(2018年5期)2018-12-05
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2016年6期)2016-11-16
柴油机设计与制造(2015年3期)2015-12-05
现代防御技术(2014年6期)2014-02-28
河南科技(2014年8期)2014-02-27