
基于学习的中段反导拦截时间和拦截点预测方法
2021-12-13 07:36杨子成鲜勇李少朋任乐亮张大巧
北京航空航天大学学报 2021年11期
杨子成,鲜勇,李少朋,任乐亮,张大巧
(火箭军工程大学作战保障学院,西安 710025)
导弹防御系统的建立和发展,对弹道导弹的生存能力产生了严重威胁。随着针对弹道导弹各飞行分段的反导体系日益成熟,弹道导弹的作战效能受到制约、突防难度大大增加。由于弹道导弹与反导系统的攻防对抗是体系对抗,具有参与要素多、系统建设昂贵、难以实弹对抗检验的特点,针对攻防对抗进行仿真研究是研究武器系统作战效能、论证作战方案的重要手段[1]。基于仿真的中段突防研究也是近年来弹道导弹突防研究的重点领域,已有相当多的研究成果。
地基拦截弹(Ground-based Interceptor,GBI)是中段反导动能杀伤武器,用于拦截在大气层外中段飞行的弹道导弹弹头,拦截实现方式采取直接碰撞。GBI由大气层外杀伤器(Exo-atmospheric Kill Vehicle,EKV)和助推火箭2部分组成,目前已经进行多次反导拦截试验。在2017年5月,美国使用GBI进行了一次洲际导弹反导拦截试验,从加利福尼亚范登堡空军基地发射的GBI拦截弹准确拦截一枚从太平洋中部马绍尔群岛里根试验场起飞的洲际弹道导弹,反导试验取得成功[2-3]。
GBI拦截弹在主动段关机后,主要依靠惯性自由飞行,在红外导引头发现目标后,引导EKV对来袭弹头进行拦截。由于导引头的探测距离有限,如果选择合适时机进行机动规避拦截区域,使得地基雷达无法及时更新弹头运动信息来引导GBI进行中段修正,从而使EKV在关机前导引头没有探测到来袭弹头,则成功实现了突防。因此,在对拦截导弹进行威胁评估后,预测高威胁的拦截弹与来袭洲际导弹的相遇时间和拦截位置,可为机动规避提供决策依据。
国内外已经有不少学者对预测拦截点(Predicted Intercept Point,PIP)问题进行了相关研究。PIP问题求解对于拦截弹中制导以及中末制导交接班成功,进而准确命中目标有着重要的意义。对于防空导弹、空空导弹等战术导弹,常采用基于简化的运动模型建立拦截几何,使用解析方法求解拦截点[4];或者是加入导引通过迭代计算导弹运动学弹道来预测拦截点[5]。拦截几何解析法求解方便,但是误差较大;而迭代算法精度较高,但计算周期较长[6]。
对于弹道导弹中段拦截的PIP问题,Zarchan[7]提出了适用于采用脉冲方式机动的拦截弹的基于Lambert问题求解的PIP计算方法。由于拦截弹在主动段的飞行状况比较复杂,采用Lambert数值解算求解PIP问题的方法仅适用于拦截弹自由段飞行过程。针对Lambert问题求解PIP方法的缺陷,谢经纬和陈万春[8]提出蒙特卡罗仿真建立拦截射表,进行插值来得到对应的PIP方法。Song等[9-11]提出基于神经网络的导弹状态信息与最佳制导指令映射关系,并建立独立的待飞时间预测网络,将目标轨道简化为开普勒轨道,通过预测得到的待飞时间得到PIP。
以上PIP问题求解都是立足于防御方角度,求解PIP用于拦截弹诸元计算或中制导。本文求解PIP用于弹道导弹对拦截弹的机动规避,从进攻方可获取的拦截弹信息入手,建立PIP预测模型。此外,为便于弹载计算机实现在线解算,求解PIP的方法计算量不应过大。神经网络在模式识别、预测评估、图像等领域已经广泛运用,在解决非线性问题方面也具有明显的优势。另外,神经网络可以在线下对数据集进行学习,训练好的网络结构可以实现在线上实时输出结果。因此,本文采用基于神经网络的监督学习算法,在线下通过攻防仿真得到大量样本作为神经网络训练的数据集,通过对仿真数据集学习,根据拦截弹的状态信息线上求解拦截时间与拦截点的坐标信息。
1 导弹中段攻防模型
1.1 中段攻防对抗系统组成
中段拦截对抗示意图如图1所示。中段攻防模型主要包括弹道导弹飞行仿真模块、GBI飞行仿真模块、指挥控制模块和预警探测模块[12]。本文研究主要涉及弹道导弹飞行仿真模块、GBI飞行仿真模块。

图1 中段拦截对抗示意图Fig.1 Schematic diagram of midcourse interceptionand confrontation
1)弹道导弹飞行仿真模型
弹道导弹中段飞行时,主要受地球引力、科氏惯性力和牵连惯性力。动力学方程为


式中:i=x,y,z;Pi、Ri、Gi、Fei、Fci分别为导弹所受推力、空气动力、地球引力、牵连惯性力、科氏惯性力在发射坐标系中的分量;m为导弹当前质量。
3)红外预警卫星探测模型
采用红外预警卫星对处于主动段的导弹进行探测跟踪,获取到的导弹的状态信息存在一定的误差。根据红外预警卫星的探测精度,建立误差模型来模拟卫星探测过程中存在的误差。
采用正态分布生成随机探测误差,误差服从N(0,σ)。因此,误差模型为

1.2 中段拦截系统作战流程
根据公开资料分析,中段拦截系统的工作流程如下:
1)弹道导弹点火起飞后,防御方先通过高轨红外预警卫星识别导弹尾焰的红外信号,低轨红外预警卫星对导弹进行跟踪,并发出导弹来袭预警信息。
2)红外预警卫星将信号传输至负责信息处理的地面站和指控中心,指控中心对数据进行处理并确定来袭导弹大致飞行方向和攻击目标,从而对来袭导弹进行目标识别并进行威胁评估。
3)来袭导弹释放弹头并抛撒诱饵,在来袭弹头进入前置部署雷达的探测范围后,预警雷达跟踪、探测弹头的位置、速度等信息,并将获取的信息传输给陆基精密雷达,并由陆基精密雷达对弹头进行跟踪,获取更精确的信息。
4)指控中心进行诸元计算,制定火力分配方案,并将任务指令下发至火力单元;火力单元在接收到发射指令后发射GBI进行拦截。
5)GBI助推火箭关机后释放EKV,指控中心根据陆基精密雷达获取的来袭弹头的信息,发出中制导指令,修正飞行弹道。
6)海基X波段雷达(Sea-based X band radar,SBX)发现来袭弹头及诱饵,并尝试从诱饵中识别区分出弹头。
7)在红外导引头捕获到来袭弹头后,EKV在自身携带的红外导引头引导和姿轨控发动机控制下,对来袭弹头进行直接碰撞杀伤。
8)指控中心根据陆基跟踪雷达探测的信息和EKV发回的信息进行综合研判,确定拦截是否成功,并决定是否展开后续拦截。
2 拦截时间及拦截点预测模型
2.1 预测模型输入参数分析
对中段拦截系统的作战流程进行分析,由于EKV需要在红外导引头的引导和姿轨控发动机推力作用下摧毁目标。如果可以在GBI主动段关机后,准确预测拦截时间和拦截点,为提前规划弹道进行机动提供决策依据,避开EKV红外导引头的探测范围或姿轨控发动机的最大可机动范围,从而实现突防。
为了获取预测拦截时间和预测拦截点所需的GBI信息,需要进攻方的探测设备对GBI实施探测、跟踪,获取位置、速度等信息。本文考虑采用红外预警卫星,在GBI发射后识别GBI助推火箭尾焰的红外信号,并对GBI跟踪、识别。
为使建立的模型能够准确地预测拦截时间和拦截点坐标,需要分析预测模型所需要的输入参数。由于拦截时间和拦截点是弹道导弹和GBI双方运动产生的结果,输入参数必须包含攻防双方的信息。
进攻方通过红外预警卫星获取的GBI信息仅有GBI在主动段飞行的位置、速度和点火时刻、主动段关机时刻。根据式(4),GBI在主动段关机后,飞行弹道模型相对简单,因此采用GBI在主动段的关机时刻的位置、速度及关机时刻作为输入参数。
因为在实际中,进攻方实际上只知道己方弹道导弹的相关坐标系,所以作为输入参数的GBI的位置、速度都应在弹道导弹的相关坐标系下描述。此外,GBI的位置、速度在弹道导弹相关坐标系下描述,能够体现弹道导弹与GBI之间的相对关系。
经分析,GBI的位置、速度采用在弹道导弹发射系下的坐标值描述。GBI主动段的关机时刻也采用相对于弹道导弹发射时刻的时间来描述。
2.2 拦截时间预测模型
拦截时间预测模型如图2所示。该模型输入参数为:GBI主动段关机时刻位置xs、ys、zs,速度vxs、vys、vzs(弹道导弹发射系下),关机时刻ts(相对于弹道导弹发射时刻),共7个参数;模型的输出值为拦截时刻tp,是7输入1输出模型。

图2 拦截时间预测模型示意图Fig.2 Schematic diagram of intercept time prediction model
2.3 拦截点预测模型
拦截点预测模型如图3所示。该模型输入参数为:GBI主动段关机点位置xs、ys、zs,速度vxs、vys、vzs(弹道导弹发射系下),关机时刻ts(相对于弹道导弹发射时刻),共7个参数;模型的输出值为拦截点坐标xp、yp、zp共3个参数,是7输入3输出模型。

图3 拦截点预测模型示意图Fig.3 Schematic diagram of intercept point prediction model
3 基于神经网络的监督学习
监督学习、无监督学习等基于数据驱动的学习算法是人工智能、机器学习领域的重要算法。无监督学习与有监督学习都依赖于数据集,数据集是影响算法学习效果的重要影响因素,而两者的区别在于监督学习采用的数据集的样本有具体的标签。
神经网络是一种典型的基于数据驱动进行学习的人工智能算法[13-14]。本文采用基于神经网络的监督学习算法从数据中学习经验,通过中段攻防对抗仿真制作数据集,并以神经网络的训练方式实现数据驱动下的监督学习,从而实现在线预测。
网络结构采用多层感知器(Multilayer Perceptron,MLP),MLP包括输入层、隐藏层和输出层[15]。其中,隐藏层包括多个全连接层(Fullconnected layer,FC)和激活函数。
3.1 拦截时间预测网络
拦截时间预测模型输入为(xs,ys,zs,vxs,vys,vzs,ts),输出为tp。因此,预测网络的输入层节点数为7,输出层节点数为1。
如果隐藏层中只有全连接层,那么整个网络仍然是线性网络,这会使得网络难以解决非线性的问题[16],为了提高网络对非线性问题的拟合能力,在隐藏层中引入激活函数。
常用的激活函数包括sigmoid函数、双曲正切函数tanh和线性整流函数(Rectified Linear Unit,ReLU)。
相比于sigmoid激活函数和tanh激活函数,ReLU激活函数的优点有:加速随机梯度下降法的收敛速度,且计算方法更加简单,只需要一个阈值过滤就可以得到结果,而不需要进行复杂的运算。
线性整流函数ReLU的计算方法为

拦截时间预测网络结构如图4所示,网络结构参数如表1所示。

表1 拦截时间预测网络结构Table 1 Intercept time prediction networ k str uctur e

图4 拦截时间预测网络结构Fig.4 Intercept time prediction network structure
网络采用5层隐藏层,隐藏层激活函数采用线性整流函数。
3.2 拦截点预测网络
拦截点预测模型输入为(xs,ys,zs,vxs,vys,vzs,ts),输出为(xp,yp,zp)。因此,预测网络的输入层节点数为7,输出层节点数为3。
拦截点预测网络结构如图5所示,网络结构参数如表2所示。

表2 拦截点预测网络结构Table 2 Intercept point pr ediction network structure

图5 拦截点预测网络结构Fig.5 Intercept point prediction network structure
网络采用5层隐藏层,隐藏层激活函数采用线性整流函数。
3.3 训练样本准备
监督学习依赖于数据集,本文采用中段攻防仿真系统进行红蓝攻防对抗仿真,将仿真数据作为训练样本,并将大量仿真得到的样本构成数据集。
采用某型洲际弹道导弹作为进攻导弹,发射点为确定点,目标点在经度(x-5°,x+5°)、纬度(y-5°,y+5°)范围内采用均匀分布随机生成,x、y分别为西经经度值和北纬纬度值。每一个目标点对应一条标准弹道,共随机生成10万条标准弹道,对每条弹道分别进行攻防仿真。记录GBI拦截弹相对于弹道导弹坐标系的关机点参数和关机时间,作为训练样本的输入量;将拦截时间和拦截点坐标作为训练样本的标签。得到共计10万个样本,并对样本进行数据预处理,选择70%的样本组成训练集,另外30%的样本作为测试集。
数据预处理主要是对数据进行归一化处理,将数据映射到[0,1]之间的范围。由于发射系位置坐标值在106数量级,速度坐标值在103数量级,不进行归一化处理对损失函数计算、梯度下降非常不利,从而影响神经网络的训练效果。
归一化处理公式如下:

式中:x为样本值;xmin为样本值最小值;xmax为样本值最大值;xnormlization为归一化后的样本值。
3.4 神经网络训练
在网络结构确定后,还需要确定损失函数和优化器,对网络进行训练。损失函数表示预测值与标签值之间的误差大小[17],优化器是求解损失函数最小值的优化算法。
1)损失函数选择
本文采用均方误差(Mean Square Error,MSE)作为损失函数,用来判断预测值与真实值之间的误差:

式中:M 为神经网络输出维度;^yi为预测值;yi为真实值。
2)优化器选择
在神经网络训练中的优化算法称为优化器,一般是在梯度下降法的基础上改进而来。常见的优化器包括随机梯度下降(SGD)、AdaGrad、RMSProp、Adam等。本文选择Adam作为优化器,相比经典的优化器存在收敛速度慢、学习率固定的问题,Adam具有自适应调整学习率、对网络参数的鲁棒性强的特点[18]。
网络参数θ的优化算法如下[19]:

式中:s、t分别为一阶矩、二阶矩估计值;ρ1、ρ2为矩估计的指数衰减速率,取值范围在区间[0,1)内;g为关于网络参数θ的梯度。
对式(9)得到的结果进行修正:

采用上述方法对预测网络进行训练,当损失函数低于阈值后完成训练,其他训练参数如表3所示。

表3 预测网络训练参数Table 3 Prediction networ k tr aining parameter s
拦截时间与拦截点预测流程如图6所示。图7、图8分别为拦截时间预测网络、拦截点预测网络的训练过程。

图6 拦截时间与拦截点预测流程Fig.6 Flowchart of prediction of intercept time and intercept point

图7 拦截时间预测网络训练过程Fig.7 Intercept time prediction network training process

图8 拦截点预测网络训练过程Fig.8 Intercept point prediction network training process
4 仿真结果及分析
预测网络训练好后,还需要对网络的效果进行验证。将测试集的输入量输入训练好的网络的权重矩阵中,将网络输出的结果与原测试集中的输出值进行比较,从而验证预测网络的有效性。
4.1 拦截时间预测网络验证结果
将网络模型输出预测的结果与原测试集中的拦截时间进行比较,得到拦截时间预测误差如表4所示。

表4 拦截时间预测误差Table 4 Prediction error of intercept time
图9为拦截时间预测网络预测值误差的统计直方图,图10为部分样本预测值误差折线图,图11为拦截时间预测误差箱型图。

图9 拦截时间预测误差统计直方图Fig.9 Histogram of intercept time prediction error

图10 拦截时间部分样本预测误差Fig.10 Intercept time partial sample prediction error

图11 拦截时间预测误差箱型图Fig.11 Error box plot of intercept time prediction
拦截时间预测值误差平均值为0.2240 s,最大值为1.4675 s,神经网络得到的结果能够较准确地预测GBI的拦截时刻,从而进一步得到GBI的待飞时间,用于下一步的弹道导弹中段突防规划。
4.2 拦截点坐标预测网络验证结果
将网络模型输出预测的结果与原测试集中的拦截点坐标进行比较,得到拦截点坐标预测误差如表5所示。

表5 拦截点坐标预测误差Table 5 Prediction error of intercept point’s coordinates
图12~图14为拦截点坐标预测网络各坐标轴方向坐标值预测值误差的统计直方图,图15~图17为部分样本坐标值预测误差折线图,图18为拦截点预测误差柱状图,图19为拦截点预测坐标轴误差箱型图。

图12 X轴方向拦截点坐标预测误差统计直方图Fig.12 Histogram of X-axis intercept point’s coordinate prediction error

图13 Y轴方向拦截点坐标预测误差统计直方图Fig.13 Histogram of Y-axis intercept point’s coordinate prediction error

图14 Z轴方向拦截点坐标预测误差统计直方图Fig.14 Histogram of Z-axis intercept point’s coordinate prediction error

图15 X轴方向拦截点坐标部分样本预测误差Fig.15 X-axis intercept point’s coordinate partial sample prediction error

图16 Y轴方向拦截点坐标部分样本预测误差Fig.16 Y-axis intercept point’s coordinate partial sample prediction error

图17 Z轴方向拦截点坐标部分样本预测误差Fig.17 Z-axis intercept point’s coordinate partial sample prediction error
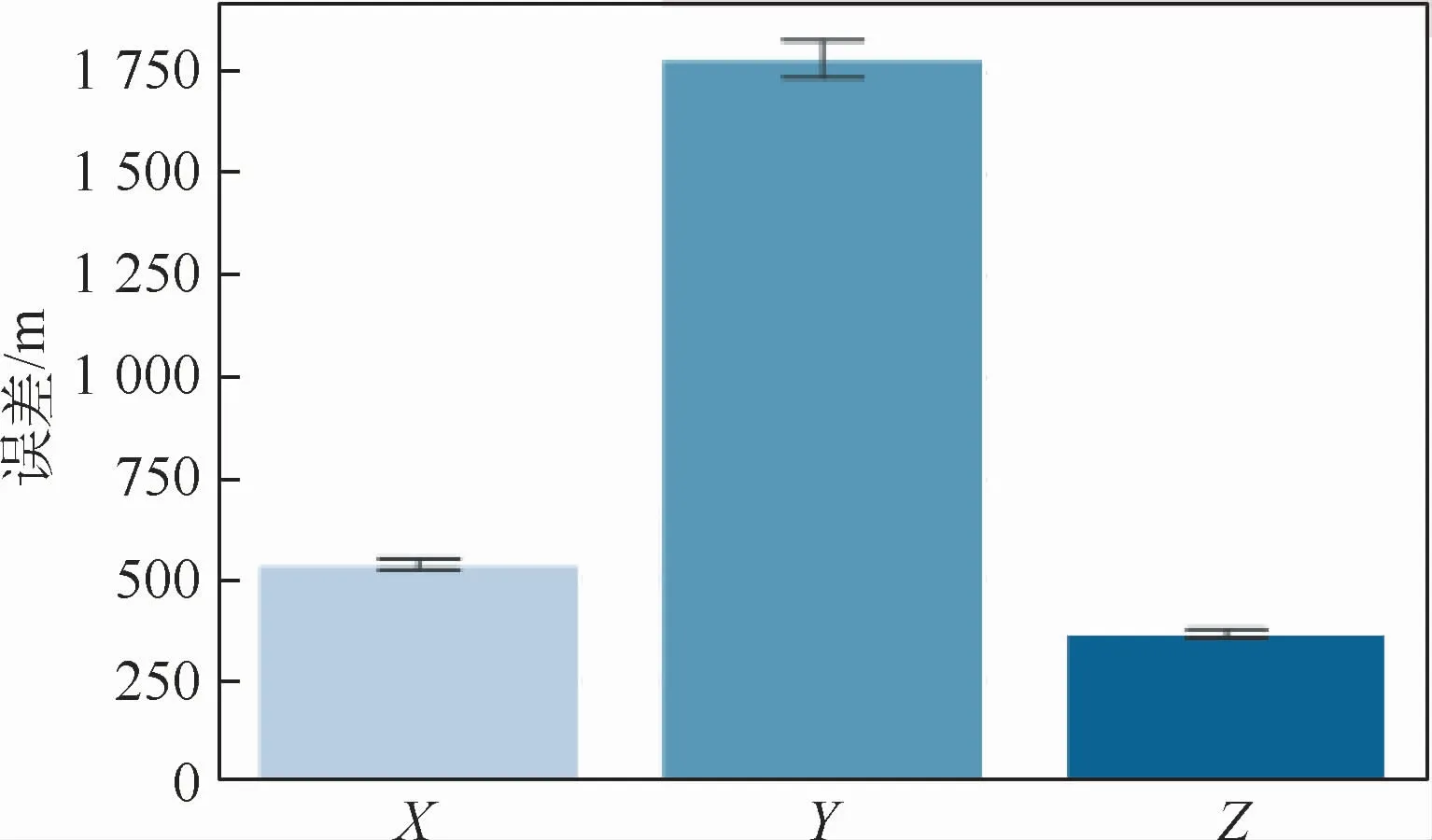
图18 各方向拦截点坐标预测误差柱状图Fig.18 Bar chart of error in different directions of intercept point prediction coordinate axis

图19 各方向拦截点坐标预测误差箱型图Fig.19 Error box plot in different directions of intercept point prediction coordinate axis
拦截点的预测值在距离上的误差平均值为2016.48 m,误差最大值为9255.64 m,由于GBI红外导引头的探测距离在200 km左右[20],远远大于预测误差,预测误差对下一步突防规划带来的影响较小,精度满足需要。
将包含误差的拦截弹主动段关机参数作为弹道计算的初始状态,使用四阶龙格库塔法进行积分,将脱靶量取得最小值时的拦截弹坐标作为积分计算结果的拦截点。从图20可以看出,预测网络的预测结果对于存在误差的关机参数弹道计算的结果在精度上具有一定的优势。

图20 神经网络预测结果与弹道仿真结果的比较Fig.20 Comparison of neural network prediction results and trajectory simulation results
5 结束语
本文主要研究了在中段突防过程中针对GBI关机参数预测拦截时间和拦截点的问题。由于神经网络具有强大的拟合非线性问题的特点,本文采用基于神经网络的监督学习算法,实现从攻防对抗仿真数据中获取预测拦截时间和拦截的能力。首先,基于弹道导弹中段攻防对抗仿真得到的结果,构建了训练数据集。然后,进行神经网络的训练,并根据结果进行调整。最后,确定网络结构和训练参数。
测试集的仿真验证表明,训练得到的网络能够准确预测拦截时间和拦截位置,证明了预测方法的有效性。实现了在洲际弹道导弹、GBI拦截弹发射点固定,洲际弹道导弹的目标点在一定的作战区域范围内变化的作战想定下,根据进攻方红外预警卫星探测数据对拦截时间、拦截点信息进行在线预测。预测的拦截时间和拦截点可用于下一步突防规划研究当中。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国教育信息化·高教职教(2022年4期)2022-05-13
煤气与热力(2022年2期)2022-03-09
家庭科学·新健康(2022年2期)2022-03-07
福建基础教育研究(2019年3期)2019-05-28
福建基础教育研究(2019年6期)2019-05-28
考试周刊(2018年15期)2018-01-21
软件(2017年6期)2017-09-23
