基于保护机理的隐性故障识别方法
2021-12-10 13:45:16戴志辉李金铄耿宏贤寇博绰
电力系统及其自动化学报 2021年11期
戴志辉,方 伟,李金铄,耿宏贤,寇博绰
(1.华北电力大学电气与电子工程学院,保定 071003;2.国网北京市电力公司城区供电公司,北京 100037)
继电保护的隐性故障会影响电力系统的安全可靠运行,并可能造成巨大的经济损失[1]。近20年来,世界范围内诸多大停电事故,如2002年伦敦南部地区大规模停电事故,2003年意大利大规模停电事故,2003年美加“8.14”大规模停电事故,2006年11月4日西欧大规模停电事故,2011年巴西大规模停电事故以及2012年印度发生的世界范围内影响人口最多的大规模停电事故,都与保护装置等的隐性故障有关。继电保护隐性故障是指由装置本身的缺陷或人为因素导致的隐患,具有一定的隐蔽性[2-4]。该故障在电力系统正常运行情况下对系统没有影响,但当系统中某些部分运行状态改变(如故障、线路潮流增大、系统振荡等非正常事件)时可能会被触发,进而造成电力系统中负荷、电源、线路的误切或者断路器的拒动,还有可能进一步导致电力系统的连锁反应,严重时导致大规模的停电事故[5-6]。因此,研究隐性故障识别方法对电力系统安全运行具有重要意义。
继电保护隐性故障一般可分为硬件类隐性故障和软件类隐性故障。前者包括保护装置元件故障、通信系统故障、测量回路故障等,后者包括保护装置数据采集与转换、保护定值、保护配合等问题[7-8]。现阶段相关研究主要针对硬件类隐性故障,但缺乏通用的定量识别方法。文献[9]针对PT中性线断线时会造成二次设备测量得到的零序电压方向与实际的零序电压方向不一致甚至相反,提出基于零序电压三次谐波的电压回路中性线断线识别方法;文献[10]通过在离线系统中注入标准电流信号或者标准正弦波信号,找出CT两点接地隐性故障;文献[11]提出了一种分合闸线圈电流与最小二乘支持向量机算法结合的断路器隐性故障在线诊断方法,主要针对断路器操作机构和直流操作回路存在的隐性故障。
针对软件性隐性故障的识别,相关研究还较少。文献[12-13]提出根据保护动作与断路器的相关性建立解析模型,将故障问题转化为数学规划问题诊断存在故障的保护及断路器,但无法检测后备保护存在的隐性故障;文献[14]从保护装置的运行机理出发,指出保护的运行状态可划分为电网稳态条件下的静态及故障条件下的动态,在2种状态下分别表现出静态特性和动态特性,并提出将WAMS测得的电网数据与保护信息系统数据进行对比检测静态时的隐性故障,但该方法仅着重于单个节点配置的保护电流互感器测量回路的隐性故障检测,可靠性也有待进一步提高;文献[15]利用混合量测的状态估计处理WAMS及SCADA采集的全网数据,得出电网的运行状态信息,并与保护信息系统记录的保护相关数据对比,得出隐性故障,该方法主要应用于静态时保护的隐性故障,无法应用于发生故障时的保护隐性故障识别。
综上,目前多数文献仅使用主、后备保护的动作信号进行故障诊断,未充分利用保护的其他信号,如保护启动信号、断路器跳闸信号等,无法体现保护启动、保护动作、断路器跳闸之间的逻辑时序关系,并且只考虑了单一保护的情形,无法用于多种保护协调配合的复杂情形。
在考虑电力系统多节点保护配置和配合的情况下,本文提出了一种针对系统“动态特性”下继电保护系统隐性故障识别方法。根据故障位置、保护启动、保护动作以及断路器跳闸之间的逻辑关系,考虑了纵联差动保护、三段式保护、复压过流保护等共存的情况,建立了反映各个信号之间关联的解析模型。基于3种预期信号与各自实际信号最大程度匹配的原则,构造出反映实际与预期差距的目标函数,并通过优化算法对目标函数进行优化求解。最后根据保护的实际结果与优化结果的差异判断是否存在隐性故障,为事故后快速分析可能存在的保护隐性故障提供了参考。
1 保护编码规则与疑似故障区域判断
1.1 一次系统及相关保护编码规则
在搭建保护解析模型前,需读入变电站的拓扑结构。本文提出一种编码规则,通过读取字母与数字结合的编号自动识别连接关系和保护配置。
1.1.1 编码规则中字母定义
设置不同字母符号表示拓扑中的元件(含母线和变压器)、线路、断路器以及保护,其含义如表1所示。
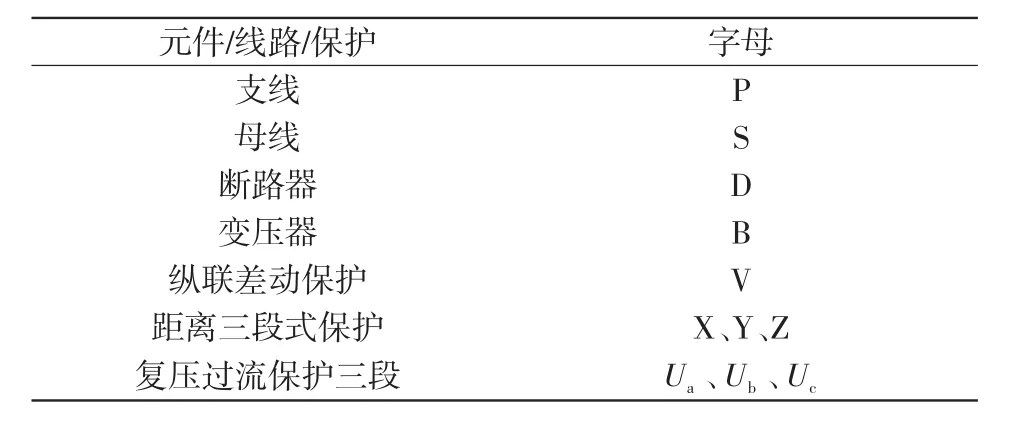
表1 编码规则中字母的含义Tab.1 Meaning of letters in coding rules
1.1.2 编码规则中数字编号
支路数字编号、断路器数字编号以及变压器数字编号根据所连母线的数字编号确认。其中:支路数字编号按照首端母线和末端母线顺序确定,若为母联开关所在线路,则用“/”表示;支路所在断路器可分为首端断路器和末端断路器,其数字编号可根据与母线的距离顺序编号;由于一条支路最多存在一个变压器,支路编号即为变压器编号,若不存在变压器,则用“/”表示。
由于保护动作期望体现在断路器跳闸上,故保护的数字编号用其就近作用的断路器数字编号表示,如ij支路首端母线侧的距离保护I段可表示为ijx。根据该编号规则,只需对母线进行编号即可将线路拓扑的连接方式、元件以及保护配置编码化,由此转换为计算机可自动识别的模式。
以图1所示线路拓扑为例进行说明。表2为拓扑结构中各个元件与线路的编号表,计算机可通过字母P的下标顺序构成支线的连接顺序,如P12通过搜寻末端母线2可知下一条支线为P23和P25;根据支线数字下标并查找相同的数字下标(顺序可不一致),可判断出支线上的元件以及保护,如支线P12,通过查找12可知该支线上含有S1、S2、D12、D21。

图1 线路拓扑Fig.1 Circuit topology
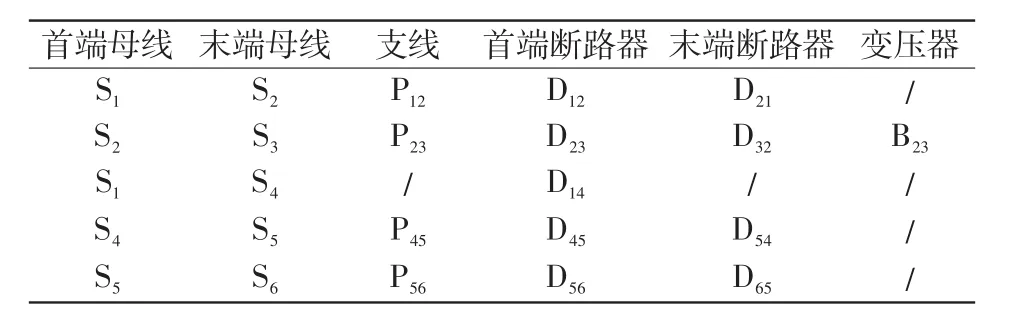
表2 线路编号Tab.2 Line numbers
1.2 疑似故障区域判断
将所研究系统的线路、元件以及断路器编码后,根据已跳闸的断路器筛选出疑似故障区域。根据跳闸断路器类型(线路断路器和母线联络开关),疑似故障区域筛选方法分为以下两类。
1.2.1 跳闸断路器为线路断路器
电网实际运行时,同时性的复故障发生概率较低,多数情况为单一元件故障,若保护和断路器均能正常动作,切除故障,则过程简单。对于线路断路器,一旦保护装置含有隐性故障,线路断路器可能拒动或误动,涉及的元件数目增加。针对该情况,一般考虑将疑似故障区域向下一级线路延伸[16],检测本级线路与下一级线路的保护启动与动作情况。
根据第1.1节的编码规则,本级断路器两位数字编号的末位编号与下一级线路两位数字编号的首位编号相同,根据该相关性,由已跳闸的线路断路器编号确定所有下一级线路,并将其作为疑似故障区域。例如图1中的线路断路器D12跳闸,根据顺延至下一级线路的原则,线路P12和线路P23将被划分为疑似故障区域。
1.2.2 跳闸断路器为母线联络开关
母联开关的疑似故障区域判定以双母接线为例进行说明。母线并列运行时,当其中一条母线或其线路故障,保护动作及时分开母联开关,可保证另一母线正常供电,缩小停电范围。在划定疑似故障区域时,除了要考虑隐性故障带来的拒动与误动,还需排除未发生故障的母线及其线路,减少计算量。
一般情况下,为减少停电区域,母联开关会与故障母线上的线路断路器相互配合。在判断已跳闸的断路器为母联开关时,将母联开关所在支线判断为疑似故障区域。除此之外,还通过联系其他已跳闸的断路器,排除与母联开关相连的无故障母线及其线路,将存在故障的母线及其线路归入疑似故障区域中。例如,图1中当母联开关D14和线路断路器D45跳闸时,根据上述疑似故障区域判断方法,线路P12和线路P23中并未有断路器参与的为正常线路,而线路P14、线路P45以及P56则为疑似故障区域。
2 继电保护系统解析模型
确立疑似故障区域后,提取其内所有的元件,根据元件故障、保护动作、断路器跳闸之间的逻辑关系,搭建疑似故障区域内所有保护的逻辑关系。
2.1 目标函数输入集合
划分故障区域后,提取此故障区域内的所有元件与线路。为方便后续分析,将线路按照等分方式划分为3段Pij1、Pij2、Pij3。将所有故障区域内的线路与元件汇总构成线路集合P、母线集合S、断路器集合D和变压器集合B。将所有集合汇总得到目标函数的输入H={P,S,D,B}。定义:Pijn取0和1分别表示支路ij第n段(n=1,2,3)正常和故障;Si取0和1、Dij取0和1以及Bij取0和1分别表示母线i、断路器ij以及变压器ij正常和故障。
设上述线路和元件共配置E个保护以及Q个断路器,根据信号类型分为3个集合:保护动作信号集合R,其中以下rijx取0和1分别表示实际断路器ij上的距离保护I段的不动作和动作;保护启动信号集合A,其中aijx取0和1分别表示实际断路器ij上的距离保护I段的不启动和启动;断路器跳闸信号集合C,其中cijx取0和1分别表示实际断路器ij的不跳闸和跳闸。以上3个集合按照实际采集到的信息如故障录波、事故报告等赋值。
2.2 保护逻辑
由于隐性故障的存在可能使故障区域内的断路器拒动,与保护配置的初衷相悖。根据保护原理,在解析模型中,故障后保护或者断路器做出的正确动作响应,称作动作期望,表现为相应的信号期望,分为保护的启动信号期望A*、动作信号期望R*以及断路器的跳闸信号期望C*,其中的子元素分别为Aijn、Rijn、Cij。定义:Aijn取0和1分别表示断路器ij上的保护n预期不启动和启动;Rijn取0和1分别表示断路器ij上的保护n预期不动作和动作;Cij取0和1分别表示断路器ij预期不跳闸或者跳闸。
保护的启动信号期望集合A*与实际的启动信号集合类似,按照逻辑关系式计算得到的预期信息进行赋值。根据保护原理,若在保护范围内存在故障,则相应的所有保护均应启动。以ij支路两侧的距离保护为例,若Pij1=1,即在支路ij的Ⅰ段范围内(距离首端10%)存在故障,断路器ij的距离保护Ⅰ段、Ⅱ段、Ⅲ段的保护范围都存在Pij1,因此距离保护Ⅰ段、Ⅱ段、Ⅲ段都将启动,即Aijx=Aijy=Aijz=1;而对于末端断路器ji,由于故障不在其距离保护Ⅰ段范围内,启动的是断路器ji上的距离保护Ⅱ段及Ⅲ段,即Aijy=Aijz=1。
保护的动作信号期望集合R*中,Rijx取0和1分别表示断路器ij上的距离保护Ⅰ段预期不动作和动作。根据继电保护时间整定原则,一般主保护的延时最小,其次是近后备保护,再次是远后备保护。因此,将故障区内的保护按整定时间由小到大的顺序排列。若发生保护范围内的故障,且在已启动的保护中时间整定最小,则该保护将动作。
以断路器ij处的保护(主保护为纵联差动保护,距离保护为后备)为例,本级主保护为纵联差动保护,其逻辑表达式为

距离保护Ⅰ段动作,跳断路器ij的逻辑表达式为

距离保护Ⅱ段动作的逻辑表达式为

一般地,远后备保护的整定时间大于下一级所有保护以及本级保护,其动作的逻辑表达式为

式中:Π表示与运算;符号“-”表示非运算;符号“⊕”为或运算;m为下一级线路保护数量的总和;n为下一级母线的编号,a为线路jn上的保护数量。若存在保护时长相等的情况,则按并列处理,逻辑关系式中忽略该保护。式中,保护的启动信号期望Aijz保证保护故障检测的正确性。延时低的保护若由于超出保护范围而未启动,则经过非运算,延时长的保护的逻辑表达式将不受影响。同理可建立阶段式电流保护的逻辑表达式。
近后备保护中,较为特殊的是断路器失灵保护。以保护动作信号和断路器跳闸情况为依据,断路器失灵保护逻辑表达式可简化为

断路器跳闸信号期望C*中,Cij取0和1分别表示断路器ij预期不跳闸或者跳闸。根据上文中保护配置信息表,设断路器ij存在n个保护,只要断路器ij收到所关联保护的动作信号,断路器ij都将跳闸,若断路器ij存在故障则断路器将拒动。断路器的跳闸信号期望表达式为

2.3 拒动与误动
保护系统隐性故障可能造成某些元件或保护拒动或误动,故在构建目标函数时需考虑拒动和误动的影响。
定义:保护或断路器的误动用f表示;保护或断路器的拒动用g表示。若ra=0,即集合中第a个保护的动作信号为不动作,其相应的期望信号Ra=1,或某条支路上断路器的实际状态cij=0,其期望信号为Cij=1,则此时该保护或断路器为拒动,即g=1;若ra=1,集合中第a个保护的动作信号为动作,其相应的期望信号Ra=0,或某条支路上断路器实际状态cij=1,而期望信号为Cij=0,则该保护或断路器为误动,即f=1;若保护或者断路器为正确动作,则f和g均为0。
3 隐性故障识别方法
建立逻辑关系后,随着故障集合H={P,S,D,B}中各元素的0和1变化,保护启动信号期望、动作信号期望及跳闸信号期望也随之发生变化。故将实际解析模型的问题转换为0-1整数规划问题。将所有可能发生的故障以集合H的形式代入目标函数中,找到目标函数值最小的情况,即最贴近实际的情况,并通过对比保护期望状态与实际状态的差别,确定不正确启动或动作的保护,检测出含有隐性故障的保护。
3.1 目标函数
目标函数中包括实际信号状态和期望信号状态,其值越小表示该场景下的保护与断路器预期情况与实际情况越接近。目标函数可表示为

目标函数取最小值的方法时,H={P,S,D,B}作为目标函数的输入。其中各个元素根据逻辑关系的搭配可以得出集合R、A、C,在目标函数里进行加减运算。根据H中元素的不同取值可以得到2N种情况。首先,将元素全为0的情况代入目标函数得到E(H0);然后,由2N的二进制数组开始进入循环,并将数组中各个元素代入目标函数;随后与E(H0)比较,取最小值,再将2N-1转换为二进制数组;循环以上环节,最后得到最小值。共进行2N次比较。算法整体流程如图2所示,程序自动完成所有判断。
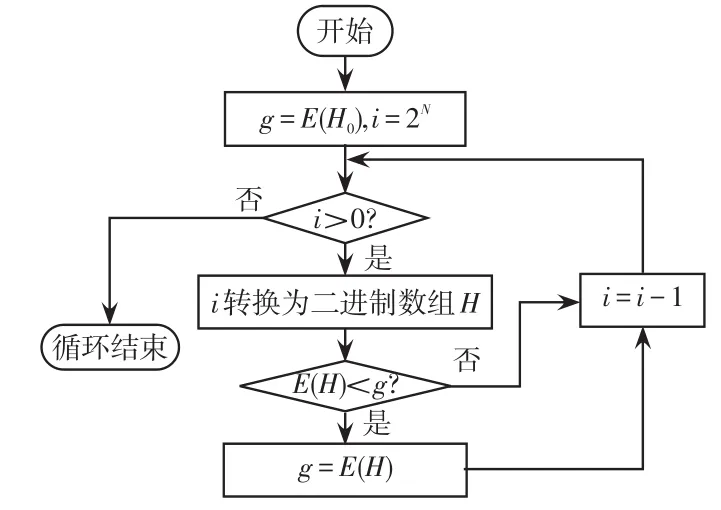
图2 优化算法流程Fig.2 Flow chart of optimization algorithm
3.2 隐性故障识别方法流程
步骤1对线路的拓扑结构进行分析,获取拓扑信息表。在发生故障后,根据断路器的动作情况确定故障区域,一般延伸至下一级线路。可根据拓扑信息表确认故障区域的方法,如断路器ij动作,则按照信息拓扑表支路ij将被划分为故障区域,所有和母线j相连的支路都为故障区域(支路j(x)x为下一级母线的编号)。
步骤2根据信息表编号的关联关系,确定支路上的各个元件。将这些元件汇总成集合H={P,S,D,B},其中每个元素都可以取0或者1,设集合H存在N个元素,H的取值有2N种情况。
步骤3将H中的所有元素根据第2.2节搭配出故障区域内存在的所有保护的逻辑关系,可得到3个集合(保护动作信号期望、保护启动信号期望、断路器跳闸期望),同理每个集合也有2N种情况。
步骤4将2N种情况都代入目标函数中,可得到2N种情况,比较得出最小值。由取得最小值时集合H中元素取值,可定位一次系统的故障点,由实际的信号情况与预期的信号情况对比,可确定软件型隐性故障。具体流程如图3所示。
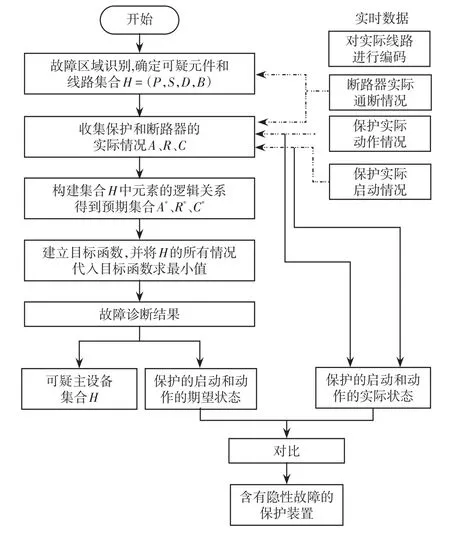
图3 隐性故障检测流程Fig.3 Flow chart of hidden failures detection
4 算例分析验证
4.1 算例1
4.1.1 事故经过
以某变电站发生雷击事故为例,系统局域电网拓扑如图4所示。在雷击事故前,110 kV母联开关112和35 kV侧Ⅱ母线母联开关312处于断开位。雷击发生时,雷击点位于B变电站35 kV侧F线上,375断路器过流,Ⅱ段动作,375断路器跳闸。2 min后,150断路器距离Ⅲ段动作,150断路器跳闸,A变电站110 kV母联112断路器#1主变压器复压方向Ⅰ段Ⅰ时限保护动作,112断路器跳闸,造成多处变电站全站失压,各并网小电解网独立运行。

图4 局部电网拓扑Fig.4 Topology of local power grid
4.1.2 方法验算
将事故拓扑图4中母线编号(母联开关112和312均处于断开位,故不计)按照编码规则编码化,并定义此为a站,得到其拓扑结构如表3所示。在目标函数运算时将自动识别连接关系和保护配置。
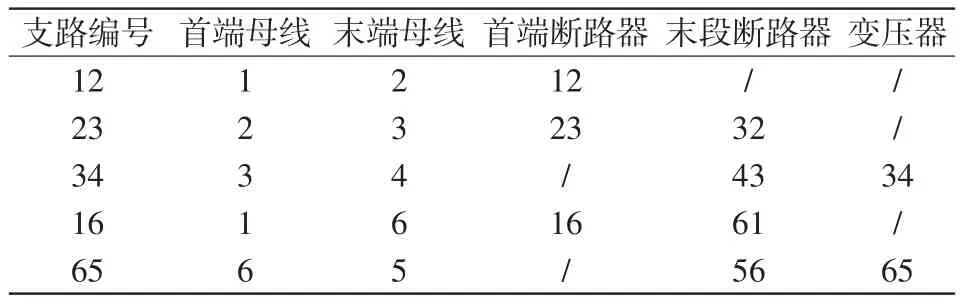
表3 事故线路拓扑结构Tab.3 Topology of fault lines
根据事故结果,跳闸的断路器应为母联开关12和断路器23。根据疑似故障筛选方法得疑似故障区域:线路12、线路23以及线路34。根据表3可确定目标函数输入为H={D12,D23,D32,D43,B34,P231,P232,P233,S1,S2,S3,S4}。
按照事故发生的实际保护启动和动作情况,确定实际保护启动与动作集合。实际信号输入如图5所示,图中,数字量为保护的状态量,其含义为:0表示不启动/不动作;1表示启动/动作;不输入为2。则实际保护动作信号R={0,0,0,0,0,0,1,0,2,2,1,2,2,0,0,0},实际保护启动信号A={0,0,0,0,0,0,1,0,2,2,1,2,2,1,1,1}。

图5 实际信号输入Fig.5 Input of actual signals
对目标函数进行优化运算,界面如图6所示,得到目标函数最优值为9,此时H={0,0,0,0,0,0,0,0,0,0,0,1}。根据集合H和保护间的逻辑关系,可进一步推算出预期保护的动作信号集合R*={0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0}和预期保护启动集合A*={0,0,0,0,0,0,1,0,0,0,1,1,1,1,1,1}。根据集合H可确认一次故障发生于母线4上;对比实际保护信号(A、R)与预期的保护信号(A*、R*)之间的差异可知隐性故障发生于断路器12(即案例中断路器112)上的复压过流I段、断路器13(即案例中断路器150)上的距离保护III段以及断路器43(即案例中断路器302)上的复压过流保护存在隐性故障。

图6 目标函数优化界面Fig.6 Optimization interface of objective function
根据该变电站的事故分析报告可知,在375断路器跳闸之后,雷击过电压造成375断路器靠母线侧(即母线4)静触头座A、B、C三相闪烙放电。由于继电保护整定计算考虑不周,保护越级动作跳闸。在B变电站#2主变压器35 kV侧复压方向过流Ⅱ段保护起动的同时,A变电站#1主变压器110 kV侧后备保护复压过流保护和150断路器线路保护距离保护都在同时起动,但是B变电站#2主变压器35 kV侧复压方向过流Ⅲ段的动作时限为2.1 s,B变电站#2主变压器110 kV复压方向过流保护,Ⅰ段时限为2.4 s,Ⅱ、Ⅲ段时限为2.7 s,而A变电站#1主变压器110 kV侧后备保护复压过流保护Ⅰ段Ⅰ时限和110 kV临北Ⅱ回150线路接地距离Ⅲ段保护的动作时限均为2.0 s,所以A变电站110 kV 150断路器、母联112断路器先行跳闸,切除故障点,造成多处线路失压。
综上所述,识别方法的结果分析与实际情况一致,验证了该方法的有效性与实用性。
4.2 算例2
事故电网拓扑如图7所示。该单电源环网主要包括电源、变压器、9个断路器、3条线路。其中,变压器和电源均配置了相应的保护,线路设有纵联保护和距离保护,其纵联保护作为主保护,距离保护为后备保护。由于该网络为环网,P23线路配有纵联保护V23、2个Ⅰ段保护(X23,X32),2个Ⅱ段保护(Y23,Y32)及2个Ⅲ段保护(Z23,Z32)。其余2条线路也各配置了相同的保护。
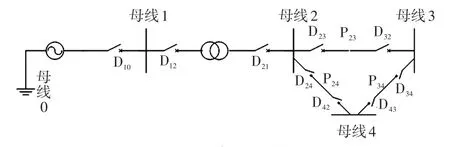
图7 电网拓扑Fig.7 Topology of power grid
事故中,线路P34发生故障、P34线路上纵联保护V34拒动,由P34线路上的距离I段保护X43动作跳断路器D43;此外P34线路母线3侧的距离三段保护(X34,Y34,Z34)均未动作,而由线路 P23的距离III段保护Z23动作跳开断路器D23。由本文方法可知,疑似故障区域将定位于环网的3条线路中,则H={D23,D32,D24,D42,D43,D34,P231,P232,P233,P241,P242,P243,P341,P342,P343,S2,S3,S4}。采集到的实际动作信号为r={0,0,0,1,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0,0,0},实际的断路器跳闸信号为c={c23,c32,c24,c42,c43,c34}={1,0,0,0,1,0}。
此外,故障过程中,P34线路上母线4侧的三段保护(X43,Y43,Z43)启动和P23线路上的III段保护Z23启动,则上传的实际启动信号为a={0,0,0,1,0,0,0,0,0,0,0,0,0,0,1,1,1,1,0,0,0}。
将上述实际数据代入目标函数并优化,得H={0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0},可知故障发生于线路P34的末端处。此时,预期保护动作信号与预期保护启动信号分别为R*={0,0,0,1,0,0,0,0,0,0,0,0,0,0,1,1,0,0,0,0,0},A*={0,0,0,1,0,0,0,0,0,0,0,0,0,0,1,1,1,1,0,1,1}。对比实际保护信号(A、R)与预期的保护信号(A*、R*)之间的差异可知,隐性故障发生于断路器34上的距离保护II段与III段。此结果与实际情况一致,验证了方法的有效性。
5 结语
本文通过识别特定的编号规则将线路拓扑结构编码化,在考虑隐性故障发生拒动和误动的情况下,通过实际已跳闸断路器的编码圈定疑似故障区域。随后考虑了疑似故障区域内的启动信号、动作信号以及断路器跳闸的关联性,并结合各种保护之间的配置配合关系建立了逻辑关系式,更好地反映了继电保护系统的工作实际。基于信号之间的实际状态与预期状态最大程度吻合的原则建立了目标函数,并采用算法优化,通过对比最终结果得出含有隐性故障的保护,提高了隐性故障识别的准确度。即使系统运行方式发生变化,由于主保护与后备保护之间的配置规则未变、根据保护原理所搭建的逻辑关系式未变,该方法仍适用于新运行方式下的隐性故障识别。根据实际事故的验证,方法具有较强的实用性。但方法中N值(疑似故障区域中可疑元件的个数)过大会影响计算量和计算速度,优化疑似故障区域判断方法和目标函数智能优化算法是后续的研究重点。
猜你喜欢
反歧视评论(2019年0期)2019-12-09 08:52:40
电子制作(2018年14期)2018-08-21 01:38:34
电子制作(2018年10期)2018-08-04 03:25:02
中国化肥信息(2018年3期)2018-01-30 06:56:43
电子制作(2017年8期)2017-06-05 09:36:15
电子制作(2017年20期)2017-04-26 06:57:59
知识经济·中国直销(2017年3期)2017-04-16 03:07:53
新闻传播(2015年14期)2015-07-18 11:14:05
新闻传播(2015年8期)2015-07-18 11:08:25
现代企业(2015年4期)2015-02-28 18:48:39