
项目式教学法在工业机器人综合实训的应用与实践
2021-12-09 13:12邱旋王伟李皓黄晶吴兴高
内燃机与配件 2021年23期
邱旋 王伟 李皓 黄晶 吴兴高


摘要:工业机器人综合实训是机器人工程专业实践教学体系中的重要一环,本文运用项目式教学法对工业机器人综合实训的教学内容进行了改革与实践,结合现有设备,利用具体项目将课程中的知识点串联起来,学习目的性强,学生知识掌握较好,提高了学生的动手能力及工程应用能力。
Abstract: Comprehensive Training of industrial robot is an important link in the practical teaching system of robot engineering specialty. In this paper, project-based teaching method is used to reform and practice the teaching content of comprehensive training of industrial robot, using specific items to link up the knowledge points in the course, the purpose of learning is strong, the students have a good grasp of knowledge, and improve the students'practical ability and engineering application ability.
關键词:实践教学体系;项目式教学法;改革实践
Key words: practice teaching system;project-based teaching method;reform and practice
中图分类号:G64 文献标识码:A 文章编号:1674-957X(2021)23-0249-03
0 引言
《工业机器人综合实训》是机器人工程专业的专业课程,是实践性、操作性和工程性都很强的专业核心课。课程集电子、信息、视觉、自动控制、数控技术于一体,一般在综合学习工业机器人技术、工业机器人示教编程与调试、工业机器人离线编程与仿真、工业机器人视觉技术等专业课程基础之后开设。课程主要培养学生具备较强的实践动手能力、学习能力和技术创新能力,以适应企业技术不断更新的需要,为学生毕业后从事工业机器人专业相关工作打下必要的实践基础。
1 项目化教学
项目化教学法,是师生通过共同实施一个完整的项目工作而进行的教学活动。教师安排课题任务,以项目的形式交给学生。在此期间,教师提出明确的项目任务,在教师的指导下,学生以小组协作的方式制定计划,共同完成较为完整的作品。项目在完成时学生可以个人或团队形式进行自我评估,接受教师以及学生的考评,从而激发学生的学习动机,促进学生积极主动的学习能力。
项目化教学模式围绕项目开展教学工作,合理整合书本知识和学生所需掌握的技术,以工程项目为核心,满足了学生的学习心理。此外,项目化教学模式有利于培养学生的团队意识,有利于促进学生深度探索。另外,项目化教学模式还利于教师掌握学生对知识的掌握情况。该教学模式打破了原来的课程量化标准,充分发挥了学生的主体作用,由被动接受转变为主动探求,拓宽了评价学生学习成果的标准,提升了学生解决实际问题的水平。采用项目化教学,学生能够完全参与教学活动,充分融入教学的各个环节,从最初的提出问题到最终的获得答案,教师只是在扮演“导演”的角色。其次,以项目为载体。按照课程内容设计相应的任务,包括具体的工程案例、具体的工程问题等,学生根据自己收集的相关材料,回答教师在上课前提出的问题,使学生在做“任务”的同时,学到理论知识。再次,以实践为导向。学生完成教师布置的任务,需要经过多个环节,并且各个环节分别含有不同的理论知识,要保证学生在实践的过程中获取知识,并随着任务的不断深入,提高知识应用能力。通过完成阶段性的小目标,最终达到整个教学过程的总目标。各个教学环节紧密相连,把握好整体节奏,引导学生紧跟教学进度。
2 课程教学现状
工业机器人综合实训为集中实践课程,教学周数为3周。目前3周的教学内容设计包含以下教学内容:博途PLC编程训练(4天),触摸屏组态画面设计(2天),PLC与机器人通讯(1天),写字机器人工作站离线仿真设计(3天),写字机器人实操(2天,)工业机器人视觉(3天),共15天。项目内容如表1所示。
从以上教学内容可以看出,课程只是单独对某个知识点的讲授与练习,侧重的是知识的讲授,各知识点之间联系不大,从目前的教学效果来看,不是很理想,对学生实践动手能力锻炼不足。
3 项目化教学改革方案研究
针对传统教学中存在的问题,结合OBE教学理念,对工业机器人综合实训的项目化教学方案进行了研究和设计。首先是企业人才需求分析,学校的主要职能之一是为社会、为企业培养高素质、技能型人才,企业的人才需求是学校课程设置、课程内容选择、课程设计、课程实施的依据。为针对性地提高学生的岗位胜任能力,首要任务是进行企业人才需求分析。本课程的授课对象是机器人工程专业的学生,为掌握企业对员工知识、能力、素养等方面的新需求,探索企业用人新标准,本课程实施前采用问卷调研和访谈交流的形式,对机器人相关企业的最新岗位需求进行了研究分析。结果显示,企业提到了对员工现场设备调试、PLC编程能力、机器人与其他设备通讯能力的需求,尤其是视觉技术的使用。
4 项目式教学法在工业机器人综合实训教学改革的应用
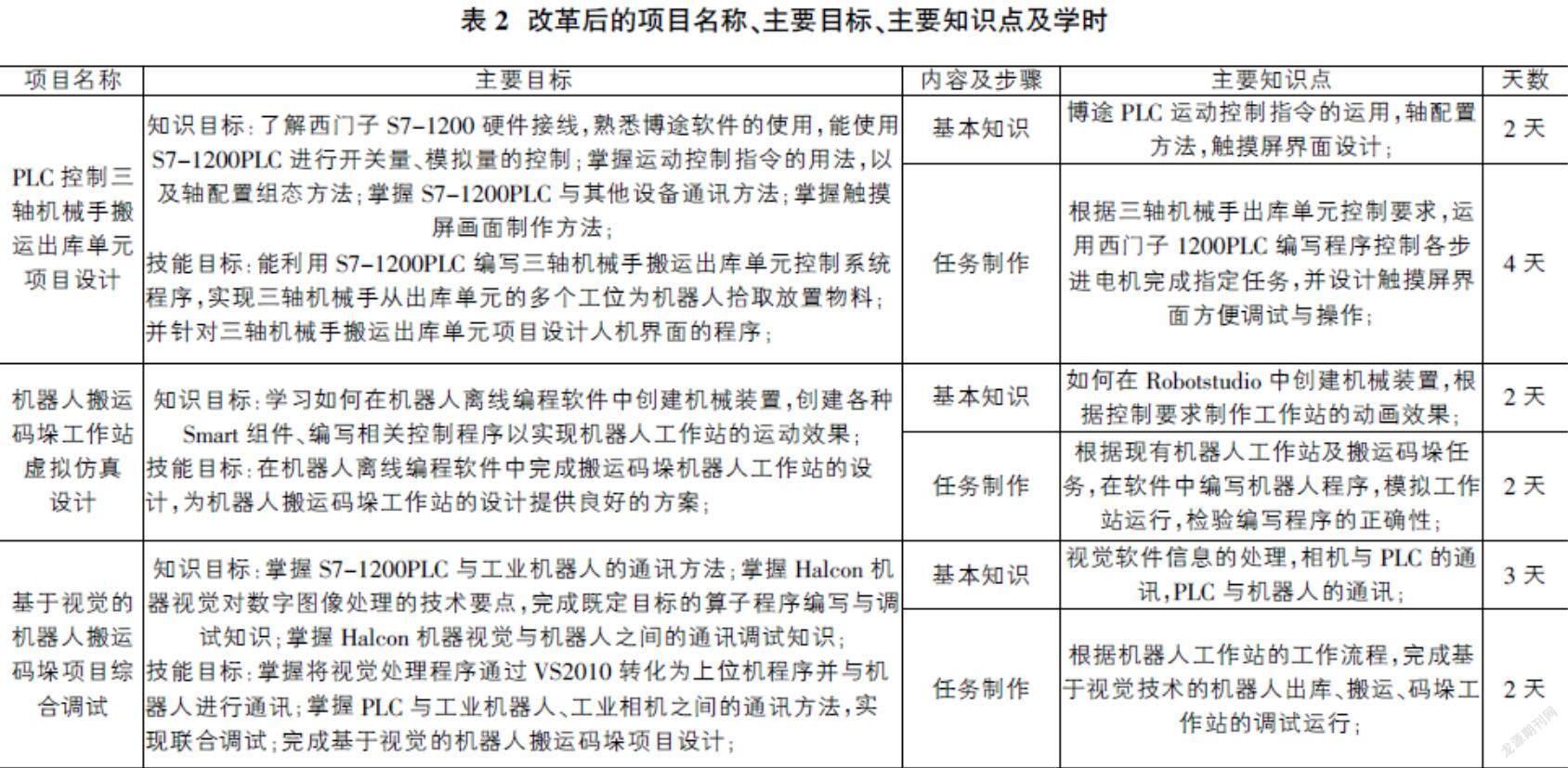
我校现有工业机器人综合实验台,如图1所示,包含单工业机器人、基础教学模组、搬运码垛出库模组、视觉跟踪模组,结合我们现有的设备,可将设计PLC控制三轴机械手搬运出库单元项目设计;机器人搬运码垛工作站虚拟仿真设计;基于视觉的机器人搬运码垛项目综合调试;根据企业岗位对知识、技能、素养方面的要求,设计了3个具有难易程度递进关系的教学项目作为工业机器人综合实训的教学内容。首先由三轴机械手出库单元将物料放置到上料传送带,再由工业机器人拾取放置到视觉跟踪模组,视觉跟踪模组模拟物料加工过程,最后再由机器人拾取放置到下料传送带,三轴机械手进行入库。
具体项目名称与内容见表2所示,通过表2所示的项目将常规教学中的相关知识点都涵盖了,而且加强了学生实践动手能力的培养。
5 实施过程
以“PLC控制三轴机械手搬运出库单元项目设计”为例,项目式教学分以下几步实施:任务提出、任务目标、相关知识、任务分析、任务制作。
任务提出:博途1200PLC编程所涉及的知识点较多,比如开关量的控制、模拟量的控制、实物接线、运动控制指令的用法、触摸屏画面的设计、PLC与外部设备的通讯等,结合现有实验设备设计PLC控制三轴机械手搬运出库单元项目将涵盖以上全部知识点,学生通过这一实际项目的练习,就能够熟练运用西门子1200PLC进行一些工程应用。
任务目标:此项目教学的目标是让学生了解西门子S7-1200硬件接线,熟悉博途软件的使用,能使用S7-1200PLC进行开关量、模拟量的控制;掌握运动控制指令的用法,以及轴配置组态方法;掌握S7-1200PLC与其他设备通讯方法;掌握触摸屏画面制作方法;能利用S7-1200PLC编写三轴机械手搬运出库单元控制系统程序,实现三轴机械手从出库单元的多个工位为机器人拾取放置物料;并针对三轴机械手搬运出库单元项目设计人机界面的程序。
相关知识:掌握西门子1200PLC轴配置方法以及运动指令的使用方法,熟悉PLC与步进驱动器、步进电机的接线方法,通过控制程序的编写及设备调试,逐步掌握PLC控制步进电机顺序控制程序的一般写法。
任务分析:
在工业机器人综合实训中,工业机器人作为项目的执行单元,工业相机及传送带等都是机器人工作站的周边设备,而PLC作为整个工作站的核心控制单元将工业机器人及周边设备联系起来,因此PLC部分的教学内容非常重要,在三轴机械手出库单元项目中既涉及到控制各个轴的步进电机,又涉及到与机器人的通讯。在之前的实训教学中,仅是对PLC的基础知识点以及相关编程指令进行了训练及实物练习,没有采用项目化教学选择一个综合性的任务将各知识点串联起来,学生认识不够,效果不佳。
“PLC控制三轴机械手搬运出库单元”项目应当作为一个大项目,里面也是由步进驱动器、步进电机的接线,博途软件中轴配置方法,运动控制指令的运用,人机界面的设计以及与机器人通讯组成。教师在讲解此部分时,先让学生在实物上熟悉单轴步进电机如何接线与编程控制,然后在设备上进行三轴出库单元的练习,完成为机器人上料的任务,从而利用一个具体项目任务将各个知识点串联起来,起到强化作用,实践证明采用此种项目式教学法效果较好,学生带着项目任务去学习,目的性强,印象深刻,掌握的知识点也比较好。
项目制作:前期通过对“PLC控制三轴机械手搬运出库单元”项目进行了详细的分析,但为了熟练掌握技能,还需进行实践操作,可对“PLC控制三轴机械手搬运出库单元项目”的任务要求稍作改动,即每个出库工位不一样,每个学生的任务均不相同,让学生自行编写程序,要求三轴机械手要准确的拾取物料并放到传送带上,为机器人上料,并在设备上验证结果,完成指定的搬运出库项目任务。
6 工业机器人综合实训课程实施过程考核
工业机器人综合实训课程的考核可按照以上设计的3个项目分别进行考核,每个项目的考核分为理论考核、过程评价和技能鉴定三项,理论考核主要是基础理论知识的掌握,过程评价主要是每位学生在项目制作过程中的实操表现;技能鑒定主要是每位学生对项目技能掌握情况的考查,能否独立完成项目的设计任务,项目任务完成的效果功能如何。课程考核理论考核占25%,过程评价占35%,技能鉴定占40%。
7 结论
工业机器人综合实训是机器人工程专业实践教学体系中重要的一环,通过项目式教学法结合现有设备对工业机器人综合实训的教学内容进行了改革与实践,利用具体项目将课程中的知识点串联起来,学习目的性强,学生知识掌握较好,提高了学生的动手能力及工程应用能力,大力推进了我校机器人工程专业实践教学体系的改革。
参考文献:
[1]王伟,朱岩松,周耀瑞,何江波,杨博.项目式教学在《机电设备单片机控制》教学中的改革与探讨[J].电子世界,2019(15):20-21.
[2]胡伟伟,李奇奇,余春.工业机器人模块化实训平台的设计与实现[J].内燃机与配件,2021(14):91-92.
[3]林谊,陈丙南,胡伟伟.实训用产线控制系统设计与实现[J].内燃机与配件,2021(14):218-219.
[4]朱栋,冯成涛,储开斌.“电子技术”课程设计的项目化教学改革探索——以数字化超声波发生器电路为例[J].教育教学论坛,2021(35):57-60.
[5]郭海军.基于高职院校《新能源汽车底盘》项目化课程学生核心素养评价方式的探索与研究[J].时代汽车,2021(17):89-90.
[6]杨高宏,赵小飞.浅析液压气压传动课程项目化教学实训资源建设[J].内燃机与配件,2021(16):220-221.
[7]刘静.项目化教学在“FPGA在汽车系统中的应用”课程中的应用与实践[J].现代职业教育,2021(35):86-87.
[8]孙国艳.基于双元制的机械制图测绘项目化教学研究与实践[J].济南职业学院学报,2021(04):40-42,59.
[9]王延申.新课改下理实一体化教学在PLC课程教学的探索[J].农机使用与维修,2021(08):120-122.
[10]黄跃涛.基于学科项目化学习理论的实验教学设计——以“探究两个互成角度的力的合成规律”实验为例[J].教学月刊·中学版(教学参考),2021(Z2):101-104.
[11]温秀平,陈巍,黄家才,解乃军,耿冉冉.基于项目化教学的创新型人才培养模式与考核评价方法研究[J].中国现代教育装备,2021(13):137-138,144.
[12]何志忠,杨华,魏亮,韩玉科.基于技能大赛的项目化实践教学模式研究[J].汽车实用技术,2021,46(13):153-155.
[13]束俊飞,周飞.工业机器人1+X技能等级证书与专业建设融合的研究[J].南方农机,2021,52(17):107-110.
[14]张国泉,骆少明,黄福,杨勇.循环加强体验教学模式构建研究——以中职学校“工业机器人操作与编程”课程教学为例[J].职教通讯,2021(08):100-107.
[15]谭娟.“工业机器人应用与编程技能实训”渐进式项目设计[J].南方农机,2021,52(14):141-143.
猜你喜欢
科学与财富(2017年11期)2017-05-25
戏剧之家(2017年7期)2017-05-12
成才之路(2016年35期)2016-12-12
新教育时代·教师版(2016年26期)2016-12-06
中小企业管理与科技·上旬刊(2016年11期)2016-11-28
中国市场(2016年40期)2016-11-28
戏剧之家(2016年21期)2016-11-23
考试周刊(2016年39期)2016-06-12
考试周刊(2016年5期)2016-03-11
