
谈船舶在受限水域中操纵临界点评价 参数研究及应用
2021-12-09 19:09钱卫忠
航海 2021年6期
关键词:应用
摘 要:在受限水域中航行的船舶其操纵性除与船舶本身的船型、吨位、装载状态有关外,还同受限水域的水深、宽度及风流等因素有着密切的关系,在船舶操纵实践中船长较难运用某一项船舶操纵理论来判断船舶当时所受到上述哪个因素的影响及其大小的。作者经过多年的调查、研究、实践、总结得出,船舶在受限水域中航行时,影响其操纵的各种内外力作用的大小用受限水域船舶操纵临界点评价参数(以下简称“临界点评价参数”)来衡量,以便航海人员操纵船舶时可快速判断是否即将处于或处于操纵困难状态,能及时采取正确的措施减少或避免险情和事故的发生。
关键词:受限水域;船舶操纵临界点;评价参数;应用
0 引 言
多年来,船舶在长江上海段水域航行期间一旦操纵困难或航向把定不牢时,船长的第一反应往往是舵机失灵了(或故障了),其实除了有的船确实是舵机发生故障(本文不做研究)外,还有一些船是在受限水域中航行受到包括浅水效应、侧壁效应、伴流、风、流等多种外力的作用引起的,其大小还与船舶本身的特性包括舵的性能、阻力、主机功率和推力、螺旋桨致偏以及吃水差、纵倾和横倾等因素有关,由于部分操纵者对上述的浅水效应的反应有些迟钝,甚至压根儿没有这概念,因此,错失了挽回危险局面的时机。笔者使用调查法对近几年的案例(除舵机故障外)进行分析研究得出用“临界点评价参数”指标来衡量船舶是否处于或即将处于难以驾驭的临界状态,可帮助船舶操纵人员正确认识和快速评价船舶当时是否受到浅水效应的影响,可以使船舶提前化解风险,并且非常简便实用。
1 定 义
(1)受限水域:受限水域是指相对不同吃水和船宽的船舶而言,水深相对较浅和航道宽度相对较窄的水域。
(2)受限水域操纵临界点:在受限水域中,当船舶的舵转船总力矩(Mx)与船舶所受外界的总力矩(Mo)方向相反时,且Mx与Mo的绝对值差接近零的过程中,船上的舵即将失去控向能力,即出现船舶操纵临界点。
(3)浅水效应:由于水域的水深相对较浅而使船舶运动特点发生的变化,称之为浅水效应。
(4)侧壁效应:由于水道的宽度相对较窄而使船舶运动特点发生的变化,称之为侧壁效应。
2 受限水域中船舶操纵性以及影响的主要因素
某一艘特定的船舶其操纵性除了与船舶本身的舵力有关外,还与风、流、浅水效应和侧壁效应等外力大小有关。一旦作用在船上外部的总力矩(Mo)大于或等于舵转船总力矩(Mx)时,船舶就很难驾驭,反之,船舶操纵性尚可。
2.1 受限水域中影响船舶操纵的外力
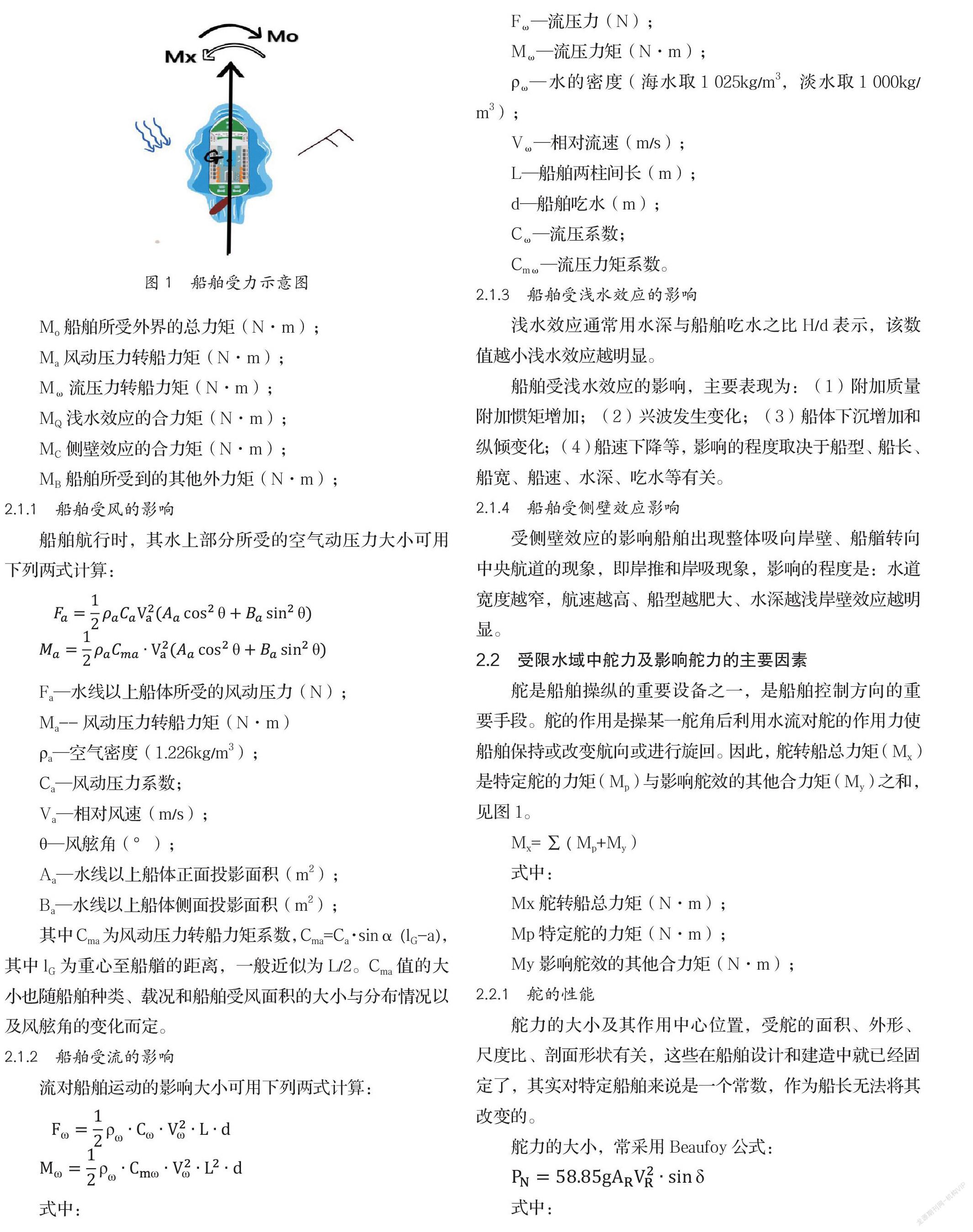
作用在船体上的外力矩(Mo)等于风动压力转船力矩(Ma)、流压力转船力矩(Mω)、浅水效应的合力距(MQ)、侧壁效应的合力距(MC)、船舶所受到的其他外力矩(MB)之和(见图1)。
Mo=∑( Ma+Mω+MQ+MC+MB)
式中:
Mo船舶所受外界的总力矩(N·m);
Ma 风动压力转船力矩(N·m);
Mω 流壓力转船力矩(N·m);
MQ浅水效应的合力矩(N·m);
MC侧壁效应的合力矩(N·m);
MB船舶所受到的其他外力矩(N·m);
2.1.1 船舶受风的影响
船舶航行时,其水上部分所受的空气动压力大小可用下列两式计算:
Fa—水线以上船体所受的风动压力(N);
Ma--风动压力转船力矩(N·m)
ρa—空气密度(1.226kg/m3);
Ca—风动压力系数;
Va—相对风速(m/s);
θ—风舷角(°);
Aa—水线以上船体正面投影面积(m2);
Ba—水线以上船体侧面投影面积(m2);
其中Cma为风动压力转船力矩系数,Cma=Ca·sinα (lG-a),其中lG为重心至船艏的距离,一般近似为L/2。Cma值的大小也随船舶种类、载况和船舶受风面积的大小与分布情况以及风舷角的变化而定。
2.1.2 船舶受流的影响
流对船舶运动的影响大小可用下列两式计算:
式中:
Fω—流压力(N);
Mω—流压力矩(N·m);
ρω—水的密度(海水取1 025kg/m3,淡水取1 000kg/m3);
Vω—相对流速(m/s);
L—船舶两柱间长(m);
d—船舶吃水(m);
Cω—流压系数;
Cmω—流压力矩系数。
2.1.3 船舶受浅水效应的影响
浅水效应通常用水深与船舶吃水之比H/d表示,该数值越小浅水效应越明显。
船舶受浅水效应的影响,主要表现为:(1)附加质量附加惯矩增加;(2)兴波发生变化;(3)船体下沉增加和纵倾变化;(4)船速下降等,影响的程度取决于船型、船长、船宽、船速、水深、吃水等有关。
2.1.4 船舶受侧壁效应影响
受侧壁效应的影响船舶出现整体吸向岸壁、船艏转向中央航道的现象,即岸推和岸吸现象,影响的程度是:水道宽度越窄,航速越高、船型越肥大、水深越浅岸壁效应越明显。
2.2 受限水域中舵力及影响舵力的主要因素
舵是船舶操纵的重要设备之一,是船舶控制方向的重要手段。舵的作用是操某一舵角后利用水流对舵的作用力使船舶保持或改变航向或进行旋回。因此,舵转船总力矩(Mx)是特定舵的力矩(Mp)与影响舵效的其他合力矩(My)之和,见图1。
Mx=∑( Mp+My)
式中:
Mx舵转船总力矩(N·m);
Mp 特定舵的力矩(N·m);
My影响舵效的其他合力矩(N·m);
2.2.1 舵的性能
舵力的大小及其作用中心位置,受舵的面积、外形、尺度比、剖面形状有关,这些在船舶设计和建造中就已经固定了,其实对特定船舶来说是一个常数,作为船长无法将其改变的。
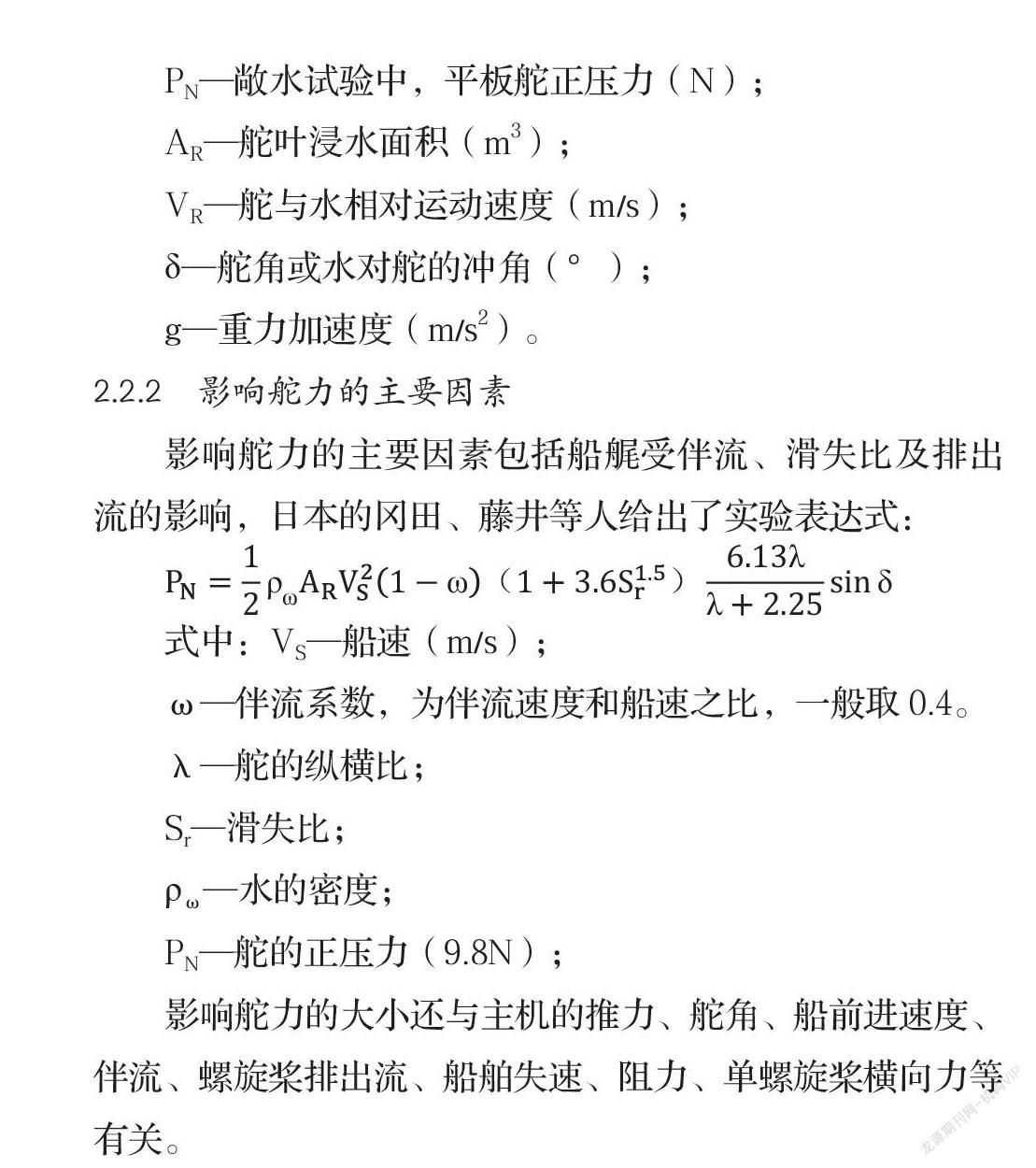
舵力的大小,常采用Beaufoy公式:
式中:
PN—敞水试验中,平板舵正压力(N);
AR—舵叶浸水面积(m3);
VR—舵与水相对运动速度(m/s);
δ—舵角或水对舵的冲角(°);
g—重力加速度(m/s2)。
2.2.2 影响舵力的主要因素
影响舵力的主要因素包括船艉受伴流、滑失比及排出流的影响,日本的冈田、藤井等人给出了实验表达式:
式中:VS—船速(m/s);
ω—伴流系数,为伴流速度和船速之比,一般取0.4。
λ—舵的纵横比;
Sr—滑失比;
ρω—水的密度;
PN—舵的正压力(9.8N);
影响舵力的大小还与主机的推力、舵角、船前进速度、伴流、螺旋桨排出流、船舶失速、阻力、单螺旋桨横向力等有关。
小结:(1)当(Mx- Mo)远大于零时,船舶受上述各种因素影响后船舶仍处于可控状态;(2)当(Mx- Mo)接近零或时而大于零或时而小于零状态,船舶受上述各种因素影响后属船舶操纵临界点状态;(3)当(Mx- Mo)小于零时,船舶受各种影响后处于难以驾驭的状态,甚至是失控状态。
3 受限水域船舶操纵临界点评价参数研究
船舶在受限水域中航行其操纵性大多情况下是可控的,不至于出现无法驾驭的情况,但也有些船舶出现“跑舵”后的确就很难把定,船长甚至会说“做了N年船长从未遇到过这种现象”,便怀疑舵机出问题了,那么如何判断其当时的操纵性呢?通过对几十艘次船舶相关案例的研究得出,船舶受上述各种因素影响后(Mx- Mo)值接近零或时而大于零或时而小于零状态,此时船舶正处于操纵临界点状态,本文将出现这种状态时的船速、舵角、主机使用等经验值转化为衡量指标即受限水域船舶操纵临界点评价参数,帮助船舶操纵人员正确认识到船舶是否受到浅水效应的影响,判断出船舶操纵性可控与否,以便能及时采取措施化解风险或避免事故的发生。以下是对几十起类似案例研究中最典型的两起案例:
实例1:2014年2月27日,散货船“XX6”轮(船长189.99 m、船宽32.26 m、吃水12.69 m/12.85 m、总吨32 965、装载煤炭55 000 t)约0530时过XX航道D3灯浮进口航行,船舶微速前进,船长感到舵效很差,0536时加车航速加至8 kn左右,仍很难把定航向,因此放弃追越前船的意图,约0750时,前进二,航速7 kn左右,在D22灯浮下游出口航道边线搁浅。
0536-0750时,船舶以7 kn左右速度呈蛇形前进,船长不断使用满舵或大舵角无法把定航向,这时作用在船上的(Mx- Mo)值接近零或小于零(已到了临界点),最终使用满舵也压不住船艏的偏转导致冲出航道搁浅。
实例2 :2008年5月26日0445时,散货船“XX11” 轮(船长185.0 m、船宽32.0 m、吃水9.43 m/9.84 m吃水、总吨26 358、载重吨38 271 t、装煤35 126 t、上海外高桥电厂码头卸货)0352时过圆圆沙灯船进口,0410时减车为前进二,速度降至6 kn,0414时因舵效差加车至前进三、以增加舵效,0423时车保持前进三、航速8 kn,满舵才能扼制船艏偏转,0436时航速8 kn左右、左满舵,拟穿越航道去靠码头,0441时航速8 kn左右、车改前进二、航向258°,接着下令右满舵、停车、后退二、距码头約600 m,0442时航速7.2 kn,船艏继续左转,后退三,0443时航向252°,航速6 kn,距码头约300 m,0445时左右碰撞码头。
0414-0441时,因航速低(6 kn左右)舵效差,采取加车以增加舵效航速8 kn,满舵才能扼制船艏偏转,这段时间作用在船上的(Mx- Mo)值趋于零(已到了临界点)。
0441-0443时,航速从8 kn减至6 kn减速过程中,右满舵仍无法克服船艏向左转的趋势,这时作用在船上的(Mx- Mo)值小于零,当时影响操纵的所有外力中,伴流明显增大、排出流明显减小、而作用在船体上的风流压角也在改变,其外力的影响显著增强,此时舵的转船力矩明显减小,几乎无舵效。
通过以上典型案例的归纳分析可以看出,受限水域中船舶操纵性以及影响的主要因素:当船舶的舵转船总力矩(Mx)与船舶所受外界的总力矩(Mo)方向相反时,且Mx与Mo的绝对值差接近零的过程中,船上的舵即将失去控向能力,即达到船舶操纵临界点。受限水域中船舶操纵临界点评价参数见表1。
4 受限水域中船舶操纵临界点参数的验证和应用
2020年2月25日,散货船“XX212”轮(船长163.3 m、船宽25.6 m、吃水10.4 m/10.8 m、总吨17 167、载重吨27 279 t、装载黄沙27 000 t),约2030时左右过XX航道3号灯浮进口、前进二、航速8 kn左右,舵角20°以上航向才能把定,船长感觉到操纵比平时困难(已到了临界点),2126时减速、前进一,航速8.7 kn,船长感觉舵效特差左满舵也压不住船艏偏转,2128时航速8 kn、加车已无法克服船艏的偏转,导致碰撞长江口北槽深水航道9号灯浮。
本案例中“XX212”轮2030时左右参数1、参数2、参数4的特征反映出船舶已出现船舶操纵临界点,2126时出现参数3的特征。如果“XX212”轮船长已经掌握了“受限水域中船舶操纵性评价参数”,并且能正确合理的应用到船舶操纵实践中去,也就是在2030时左右船长采取以下措施,则可以避免事故的发生。
(1)迅速派人准备抛锚;
(2)如果水域足够,可先掉头驶离该水域;
(3)如果水域不允许掉头的话,也可选择相对合适的水域抛锚;
(4)联系附近的拖轮协助继续前行;
(5)选择通航条件较好时机再驶入,如选择缓流、风小、富余水深再大一些的时机进入。
5 总 结
航行在受限水域中的船舶应用好“受限水域中船舶操纵临界点评价参数”,有助于船长果断作出调整航行计划,采取合理措施,以避免险情或事故的发生。受限水域中船舶操纵课题是一项复杂且长期的过程,其实践性很强,衷心希望广大的航海人员和研究人员在实践中进一步论证和探讨,由于研究资料有限,不妥之处敬请指正。
参考文献
[1] 周东平.船舶操纵[M].北京:人民交通出版社,1996.8.
作者简介:
钱卫忠,无限航区一等船长,从事通航管理研究,(E-mail)captain_qian@shmsa.gov.cn,15316565607
猜你喜欢
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
考试周刊(2016年76期)2016-10-09
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
