融合自适应稀疏表示和相关系数的高光谱伪装分类方法
2021-12-08 09:55:00李秉璇刘贺雄王法臻
光谱学与光谱分析 2021年12期
周 冰,李秉璇,贺 宣,刘贺雄,王法臻
陆军工程大学石家庄校区,河北 石家庄 050000
引 言
陆基条件下的高光谱成像一般指的是用手持或者小型无人机[1]为载体的成像光谱仪进行成像; 不同于传统遥感光谱图像分类,陆基条件下的高光谱目标分类,训练样本不仅较难获得,并且在陆基条件下的高光谱图像中,训练样本之间的相关性随着目标类型、探测器参数以及成像环境等因素时刻发生变化。对于陆基高光谱图像来说,使用基于固定范数约束的稀疏编码策略无法适应陆基条件下高光谱成像多变的环境,针对这一问题,提出一种新的融合自适应稀疏表示与相关系数的高光谱图像分类方法,有效解决陆基高光谱图像分类的问题,通过两组高光谱图像实验,验证了本算法的有效性与鲁棒性。
1 自适应稀疏表示
D=[D1,D2,D3,…,Dc]
=[a1, 1,a1, 2,a1, 3,…,ac, nc]
(1)
一个来自光谱空间的未知样本x∈Rd可以通过联合字典线性表示,如式(2)所示
x=Dα
(2)
其中,α=[0, …, 0,ai, 1,ai, 2, …,ai, ni, 0, …,0]T∈Rn为x的稀疏系数向量,稀疏系数向量α中的非零元素个数被称为稀疏度,在给定联合字典D的情况下,α可以通过式(3)来得到。

s.t. ‖α‖0≤K
(3)

(4)
在实际应用中,想完全获得互不相关的训练样本难度比较大,并且在很多场景中往往难以获得足够的训练样本,基于联合字典表示的方法能够解决小样本的问题[2]。联合字典表示是用所有类别的字典来表示待测样本x,所有c类的训练样本组成的联合字典为D=[D1,D2, …,Dc], 待测样本x可以由式(5)表示。
(5)
但用全部训练样本进行联合表示在实际应用中可能无法获得与待测样本同类的训练样本,此时如何对待测样本进行分类都将是错误的,联合表示(collaborative representation based classification[3])将每一个样本都使用联合字典的所有元素进行表示,这导致无法分辨待测样本的有效性。陆基条件下的高光谱图像受太阳高度角、探测时间、探测器的天顶角、探测器与太阳的方位角都会影响地物的光谱曲线,同种地物在不同的成像条件下很容易出现不同谱的情况。同样,陆基条件下的高光谱图像的训练样本不仅较难获取,而且训练样本随着环境条件、成像条件、探测器参数也会不断变化,单纯使用稀疏表示或者联合表示都不能满足陆基条件下的使用要求。自适应稀疏表示(adaptive sparse representation based classification,ASRC)是融合了稀疏表示和联合表示的稀疏表示方法,其模型为
(6)
其中diag()是对角化算符,‖Ddiag(α)‖*的定义如式(7)所示
(7)
训练样本的相关性随着实际拍摄的场景变化而变化,当训练样本完全互不相关时,此时样本字典的原子之间应该相互正交,即DTD=I,此时的稀疏表示模型变化为式(8),此时的自适应稀疏分类变为SRC。
=‖α‖1
(8)
当实际场景中的训练样本之间相关系数为1时,样本字典D=d1T,d为2范数的归一化样本,此时稀疏模型变化如式(9)所示,自适应稀疏分类变为CRC。
=‖α‖2
(9)
由以上分析可知,自适应稀疏表示不使用固定的范数约束,能够根据训练样本的变化并且自适应的调节稀疏项,能够适用于陆基条件下训练样本的多变性,提高分类精度。
2 相关系数
陆基条件下的高光谱图像相比于遥感图像的光谱间相关性更大,强相关的像素更多,而这些强相关的像素在进行稀疏分类时重构误差往往较小,是导致误分、错分的主要原因。常用的分类器例如KNN[4]分类器中使用的欧式距离并不是测量两个高光谱像素之间距离的最佳选择,而相关系数(correlation coefficient)是确定两个变量是否相关的有效指标,在此使用不同像素之间的相关系数来确定这些像素是否属于同一类,测量相关系数的计算方法如式(10)所示。
(10)
3 算法构成

接下来,我们计算像素x经过ASRC重构产生重构误差,样本字典X=[X1,X2,X3, …,Xi]作为稀疏表示的字典,αi作为Xi的稀疏向量,待测样本x可以通过字典和稀疏向量进行表示,如式(11)所示。
x=Xiαi
(11)
求出稀疏矩阵后,每一种类别的残差都可以通过式(12)来计算。
(12)
最后,通过引入正则化参数λ来将CC值与ASR进行融合,通过式(13)来获取待测样本x的标签,并将这种新的高光谱分类方法命名为CCASR。算法流程图如表1所示。
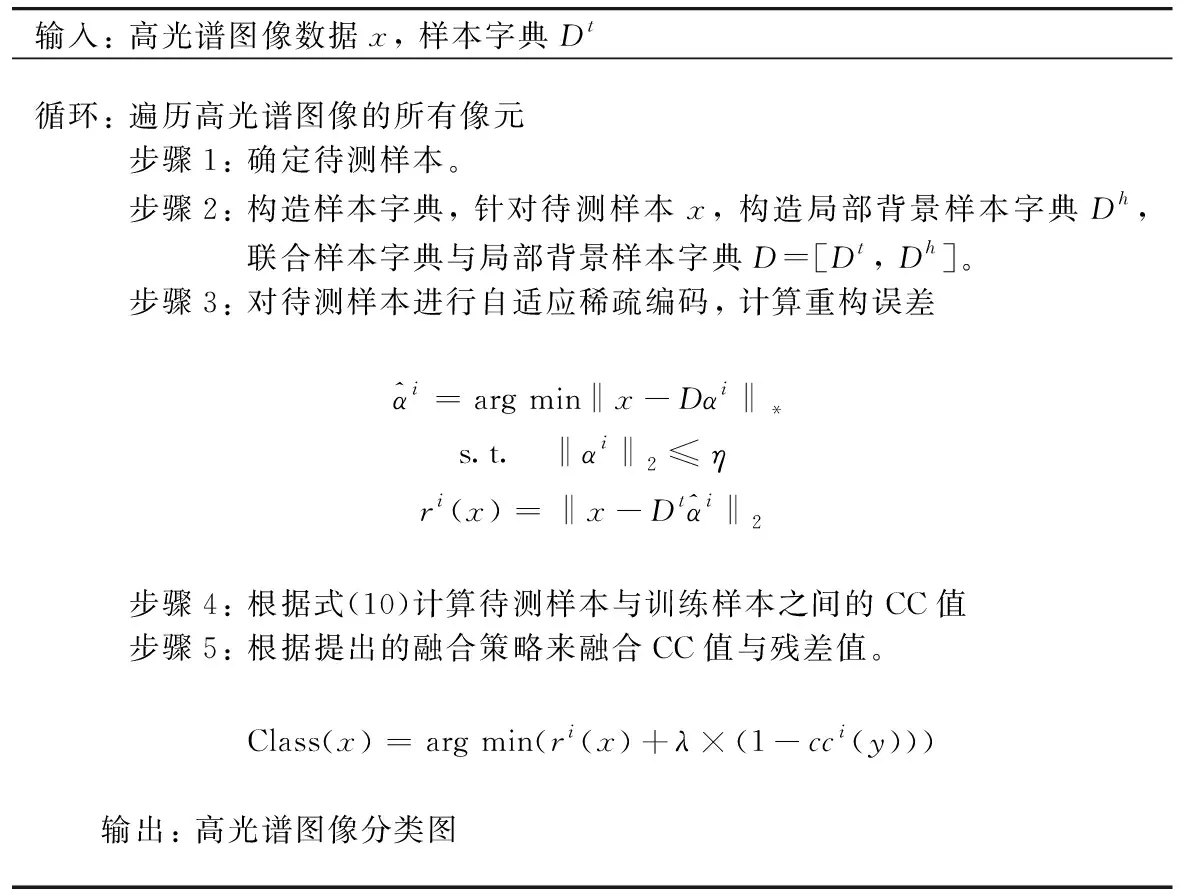
表1 CCASR的算法流程图Table 1 CCASR algorithm flow chart
Class(x)=arg min(ri(x)+λ×(1-cci(y)))
(13)
4 实验部分
采用两组实验数据来验证本算法的有效性,两组实验数据均是是通过基于声光可调谐滤波器(AOTF)的高光谱成像仪HIS-300拍摄的高光谱图像,第一组数据图像大小为470×370像素,波段宽度为449~801 nm,波段间隔为4 nm,拍摄的天气晴朗、无风、空气质量优。高光谱成像仪在拍摄时的曝光时间为0.1 s,增益设置为0。
两幅图像均选择25,50和85波段作为R,G和B三个通道合成假彩色图像。实验数据1的假彩色图和灰度图如图1所示,实验数据1的背景主要为绿色草地背景。拍摄场景中共有6种地物,按照从A到F的顺序,依次为灌木丛、某型丛林迷彩作战训练服、绿色棉质外套、某型作训雨衣、两种人工草皮。
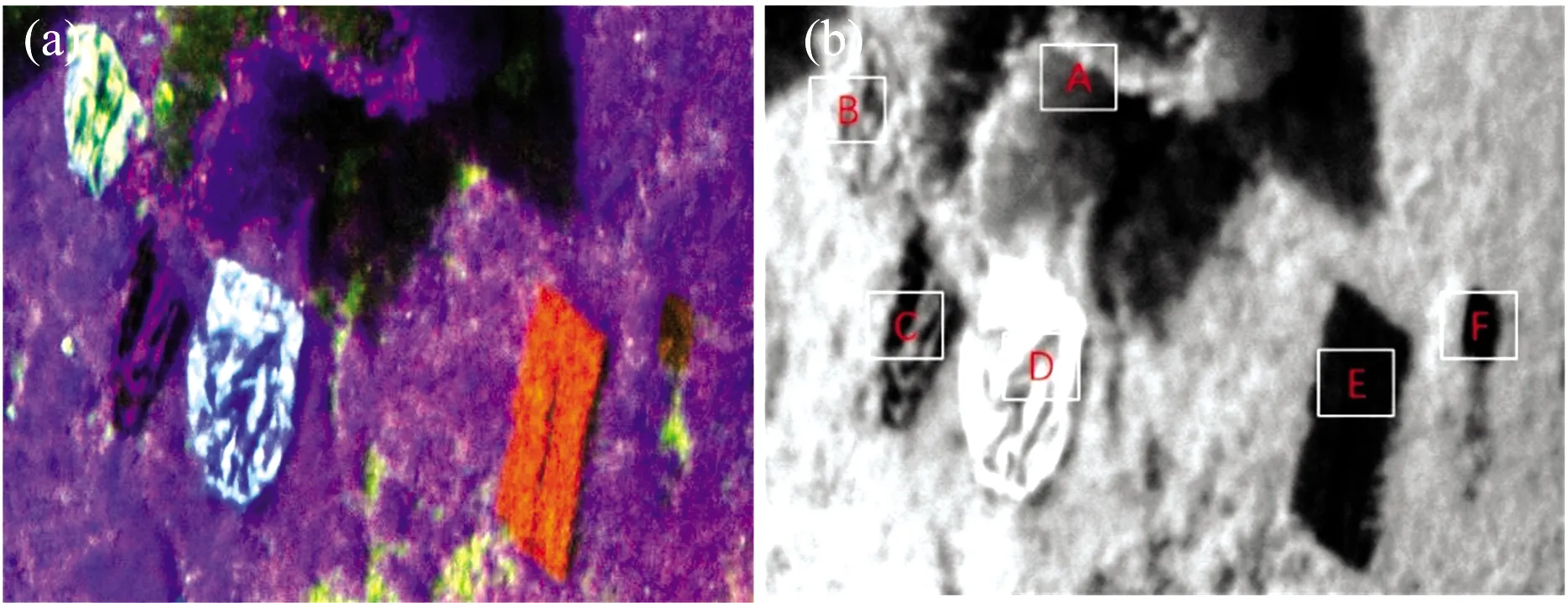
图1 实验数据1的伪彩色图像和灰度图Fig.1 Gray scale and pseudo colour images of experimental data 1
实验数据2的背景主要是荒漠背景,图像为像素大小410×400像素大小,拍摄场景的伪彩色图像和灰度图如图2所示,在图中布置了三种伪装物,从A到D的顺序依次为某型荒漠丛林作战训练服、黄色伪装板1、黄色伪装板2以及荒漠丛林迷彩伪装帽,E为荒漠背景,F为秋季浅黄色草皮,G为秋季阔叶树木的树叶。
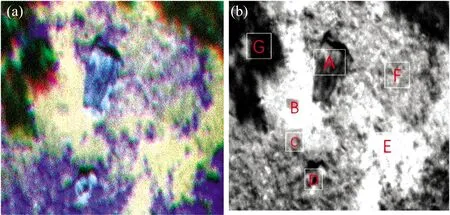
图2 实验数据2的伪彩色图像和灰度图Fig.2 Gray scale and pseudo colour images of experimental data 2
4.1 实验1
使用实验1的数据来测试本文所提方法的有效性,为了比较,采用了KNN,SRC,CRC,ASRC以及本文提出的CCASRC,但邻域数量、稀疏度、正则化参数均会分别对KNN,SRC和CRC的分类精度产生影响。因此在进行对比实验之前,有必要对每个算法的影响因素进行分析,对参数设置进行优化,确保每个算法都在最佳状态下进行分类。三种算法的分类识别精度随着参数变化的影响如图3所示。从三幅图中可以看出,三种监督算法的最佳参数N,K以及λ设置为2, 28, 10-2。
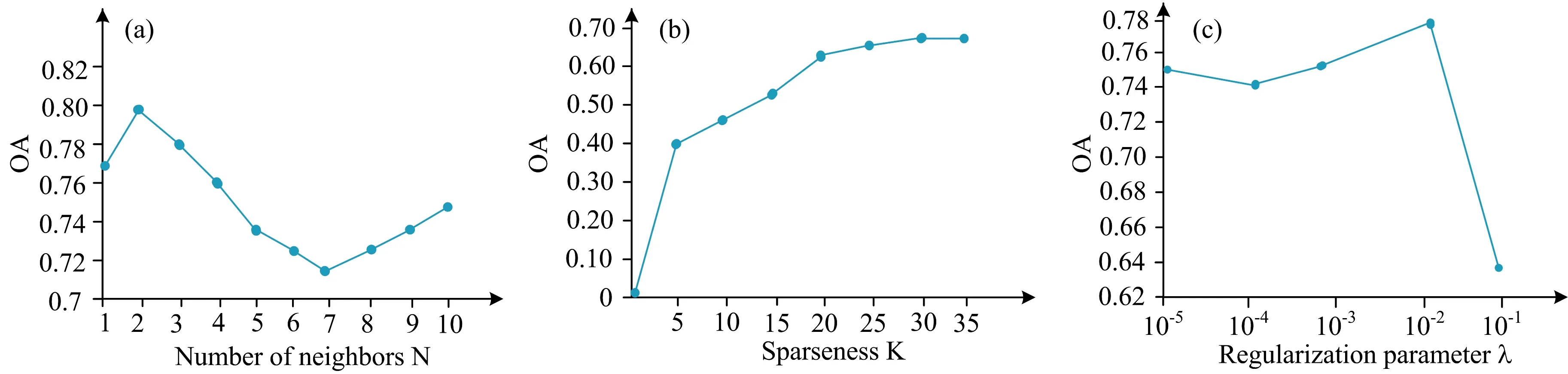
图3 三种算法分类精度受参数设置的影响(a): 邻域数量对KNN分类精度的影响; (b): K对SRC分类精度的影响; (c): 正则化参数对CRC分类精度的影响Fig.3 The classification accuracies of the three algorithm are affected by the parameter setting(a): The number of neighborhoods and KNN classification accuracy; (b): K and SRC classification accuracy;(c): Regularization parameter λ and CRC classification accuracy
CCASRC算法的主要影响参数是最近邻域数量N和正则化参数,如图4所示,从图中可以得到最近邻域数量为6,正则化参数为0.5时的分类精度最高。同时可以看出当正则化参数设置为0时,分类方法完全变成自适应稀疏分类,融合了CC值后对分类精度有一定的提高,但当正则化参数过高时,算法精度又有所下降,这可以证明本文融合策略的有效性。随着领域数量N的增加,本方法的分类精度先增加后减小,这是因为属于同一类别的像素通常由相似的材料组成,但同时也容易受到阴影和其他成像因素的影响。
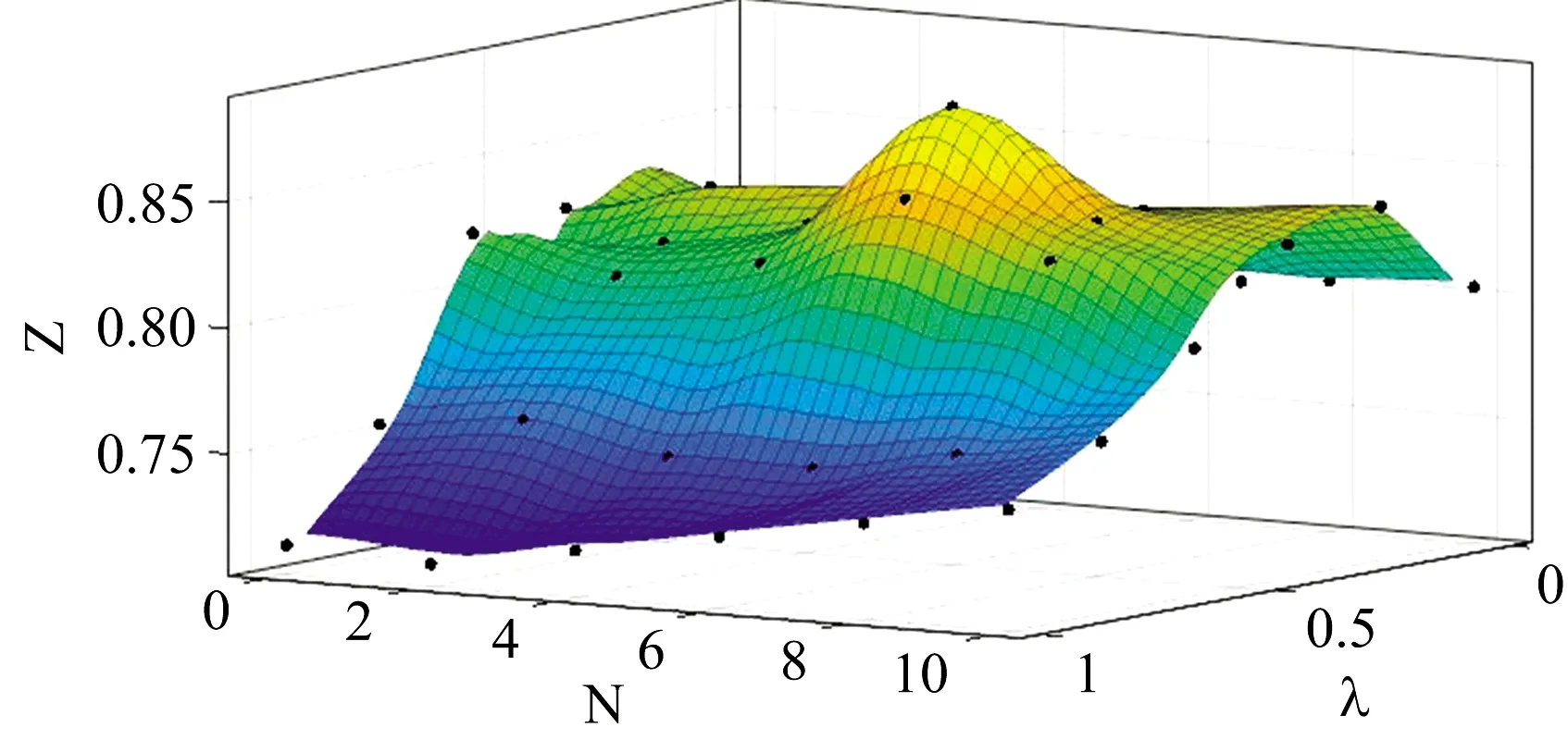
图4 参数λ和N对CCASRC算法分类精度的影响Fig.4 The classification accuracy of CCASRC algorithm is impacted by the parameters λ and N
各个监督方法中每个类别随机选取10%的样本作为训练样本,为了避免样本随机性的影响,每个实验均重复5次并取平均值作为最后分类的结果,求得的分类对象对比如图5所示,各个方法之间的分类精度矩阵直方图如图6所示。
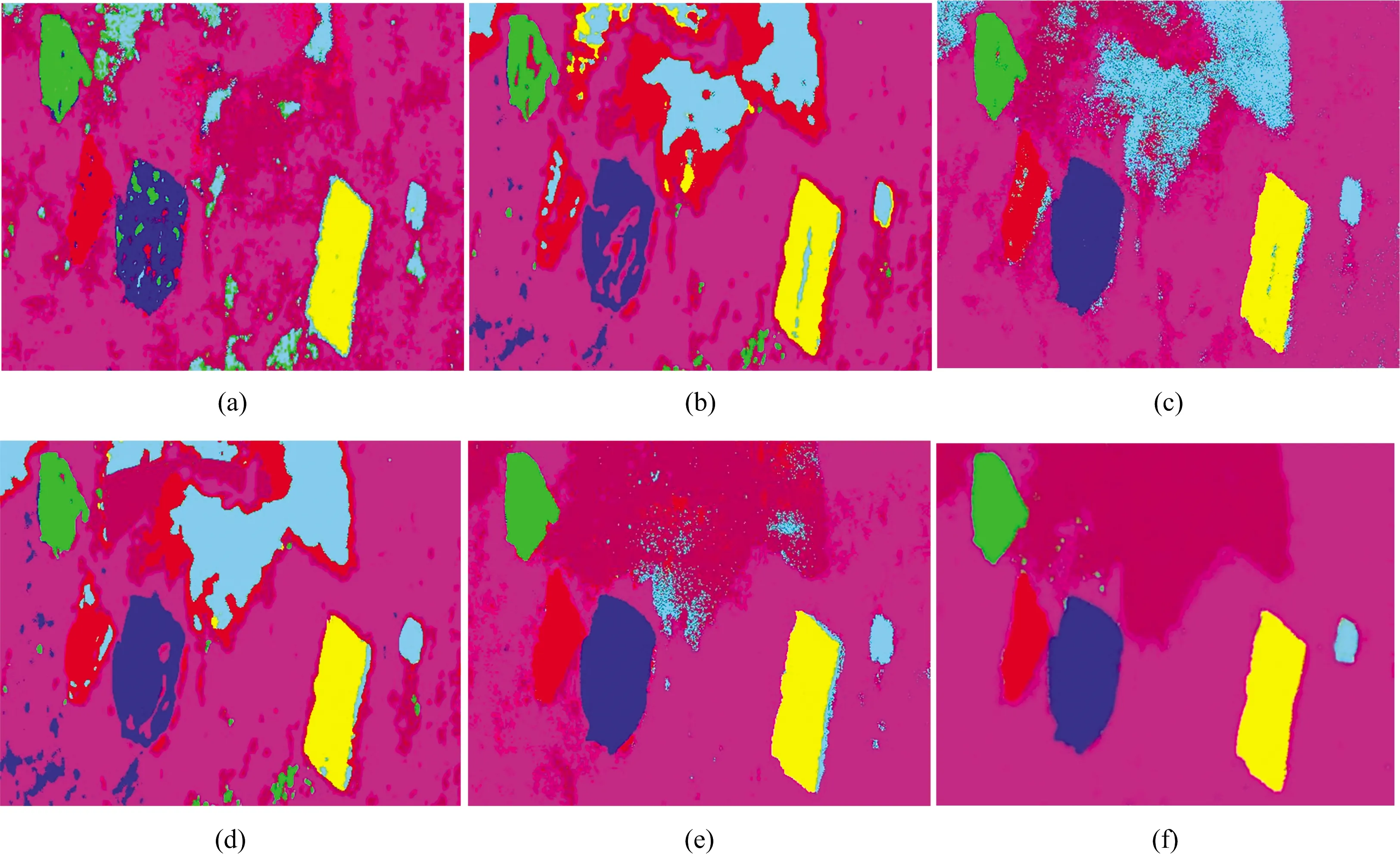
图5 绿地背景中各种分类方法的分类结果(a): K-means; (b): KNN; (c): SRC; (d): CRC; (e): ASRC; (f): CCASRCFig.5 Classification results of various classification methods in the background of green space(a): K-means; (b): KNN; (c): SRC; (d): CRC; (e): ASRC; (f): CCASRC
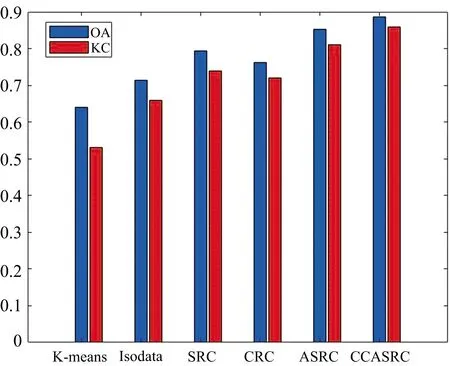
图6 各种分类方法OA的矩阵直方图Fig.6 Matrix histogram of various classification method OA
实验的6种方法中,非监督的K-means由于缺少先验信息,分类结果相较于其他方法来说最差,本属于灌木丛的大量像元被误分到了背景类别中,各个目标之间的混分情况也比较严重,总体分类精度为65%,KC为0.53。5种监督方法中,KNN方法表现最差,将灌木丛的像元误分到了目标B和E以及背景中,CRC和SRC都将属于灌木丛的像元分类到了伪装物E类别中,ASRC分类结果相对较好,但分类图中出现了较多的“麻点”,伪装目标分辨率较低。CCASR分类精度达到了88.5%,相对于其他方法最高,并且分类图中的各种目标清晰可见,尤其在阴影部分相较于ASRC分类错误相对减少,“麻点”效应大大减弱,KC系数为0.86,说明CCASRC的分类一致性也较好。
4.2 实验2
实验2针对荒漠背景下的高光谱图像进行分类,使用KNN、SRC、CRC以及本方法对图像进行分类,得到的分类结果图如图7所示,分类精度表如表2所示。
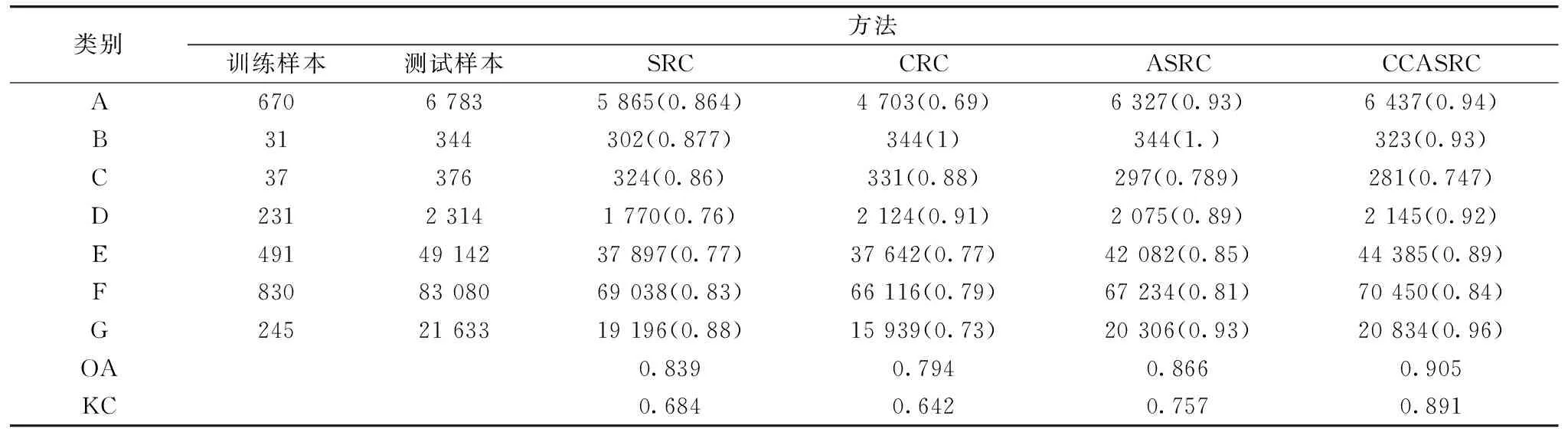
表2 各个地物及背景的分类OA,AA及KappaTable 2 Classification of various features and backgrounds OA and Kappa
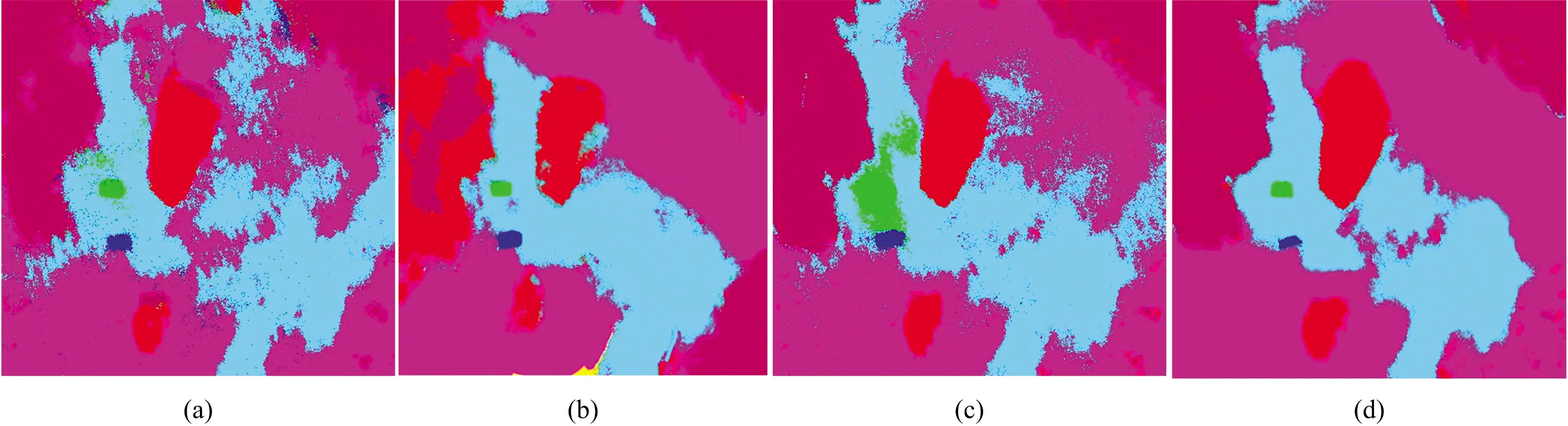
图7 荒漠背景中各种方法的分类结果(a): SRC; (b): CRC; (c): ASRC; (d): CCASRCFig.7 Classification results of various methods in desert background(a): SRC; (b): CRC; (c): ASRC; (d): CCASRC
从以上的实验结果可以看出,四种分类方法都能识别出四种伪装物体,但从分类图像和Kappa系数来看,CCASRC在分类一致性和背景分类精度上具有明显的优势。具体来看,SRC方法的分类结果“麻点”最多,虽然没有出现成块的分类错误,但各个地物及背景的分类精度都不高,并且Kappa系数只有0.684。SRC和ASRC在进行分类时都出现了成块的分类错误,SRC将左下角的背景F的像素误分为了背景G,ASRC将背景E中很大一部分像素误分为了伪装物B,而CCASRC拥有最高的分类精度,图中的场景“麻点”较少,伪装物清晰可见。这主要是因为陆基条件下的高光谱图像分类很难获得精准的样本,同一类别中获得的样本相关性较高,而本文提出的CCASRC不仅能够考虑样本的选择,同时能够考虑样本集的相关性,与相关系数融合能够克服图像中的破坏性因素(比如阴影,噪声点等),在获得较高分类精度的同时可以保持分类的一致性。
5 结 论
结合了陆基条件下的高光谱图像特点,提出了一种针对陆基条件下高光谱图像的分类方法,对研究陆基条件下的高光谱图像分类具有一定的指导意义。该方法通过引入正则化参数,融合了自适应稀疏表示和相关系数,既能兼顾样本数量以及样本之间的相关性,同时对于图像中的破坏性因素(比如阴影、噪声点等)具有一定的抗干扰性,通过绿地背景以及荒漠背景下的高光谱图像进行了分类实验,实验结果表明,本方法分类精度有了一定的提高,并且分类一致性较好,可以应用于陆基条件下的高光谱图像分类。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
当代水产(2022年1期)2022-04-26 14:35:40
科技创新与应用(2020年6期)2020-02-29 10:39:27
航天电子对抗(2017年6期)2017-12-17 21:55:17
北京理工大学学报(2016年6期)2016-11-22 11:17:22
电视技术(2016年9期)2016-10-17 09:13:41
系统工程与电子技术(2016年7期)2016-08-21 13:59:00
中国光学(2015年5期)2015-12-09 09:00:28
食品工业科技(2014年23期)2014-03-11 18:18:54
无机化学学报(2014年1期)2014-02-28 17:30:08