
水下管道智能清洁机器人的研究*
2021-12-07 04:09陈天乐胡江诚于福一王昊宇
科技创新与应用 2021年35期
陈天乐,胡江诚,于福一,王昊宇,李 赢,杨 影
(沈阳化工大学 机械与动力工程学院,辽宁 沈阳110142)
在工业生产中,管道作为一种传输工具必不可少。管道中总是含有各种杂质,且难以去除。基于这种现状,决定自主创新设计一款管道清洁机器人,主要是清扫管道内壁、起到去污作用,是一种能够沿着管道内壁按照螺旋轨迹行走的机器人,其装置附带多种传感器以及相关的操作装置(CCD传感器、位置与姿态控制传感器、超神波传感器、涡流传感器、管道清洁的毛刷装置、管道裂纹及管道接口焊接装置、防腐与防潮喷漆装置以及简单的机械手装置等),通过技术人员的远程控制来进行一系列的操作。
我们自主设计机器人主要由电机、后轮、前轮、万向节、毛刷等组成。基于毛刷的弹性与自适应性,利用电机带动毛刷离心运动,使其贴附管壁进行清扫,并且行走部分和毛刷部分通过万向联轴器联结使其完成转向动作,可实现水平大角度转弯、变径管道清扫等功能,克服了机器人在管道中卡死、打滑等缺点。并且我们调查研究了市场上现有的管道清扫机器人,对其进行研究分析最后得出结论,我们所设计的机器人具有很高的转化价值与发展前景。
1 国内外对管道内杂质的处理方法
国外一些国家在清理管道方面已经进行了一系列积极的探索,采用了不少措施。管道运输一直是国家最重要的运输方式之一,其重要地位体现在石油、天然气的运输是最为明显的,但是因为石油、天然气等运输时出现杂质是不可避免的,这也是困扰着科学家们如何解决管道清理的重要问题之一,并且管道清理也渐渐地成为重要的工程技术之一,也是逐渐兴起的科学技术领域之一。以石油运输为例,管道使用时间过久便会造成堵塞问题,为了解决这一问题达到管道使用寿命增加的目的,目前针对此类问题有了三大类清理技术:物理清洗法、化学清洗法、物理与化学结合清洗法。
2 装置的原理功能及创新点
2.1 机械结构方案设计
作者设计的管道清扫机器人主要由两个部分组成:行走部分和工作部分。由图1可见后面三块亚克力板组成的结构为行走部分,前面的毛刷以及电机组成了工作部分。这两个部分之间通过一个万向联轴器来进行连接,最终便可实现机器人在管道内壁弯道的变向功能。

图1 管道机器人整体设计图
2.2 驱动方案选择
水下智能管道机器人的行走方式是多样的,有车轮式、履带式、腿式等,腿式机器人虽然可以转过曲率半径较小的障碍,但相比较之下其他形式的机器人行走速度更快,即腿式机器人行走更慢;其中车轮式的移动速度较快,并且控制灵活方便,但是吸附在管道内壁的能力较弱,车轮的直径会使机器人相对于管壁的扭矩增大,使机器人工作和运行时的稳定性和安全性相应降低;履带式着地面积大,机器人运行平稳,但其相对于腿式的不易避开障碍,不易转弯。这三种行走方式的跨越障碍能力都很弱。因为车轮式的行走方式的技术已经非常成熟,控制起来也比其他的方式更简单,所以最终选用车轮式的行走结构。一般来说,采用三轮、四轮、六轮来驱动是最为常见的,根据机器人的大小以及经济角度出发,水下智能机器人选用三轮行走结构是最为合理的。
行走部分是在末端的三个轮子上安装马达驱动整个机器人在管道中行走,其中为了适应不同的管道内径,我们设计了一个丝杠用于调节三个轮子的收缩与伸张(见图2)。
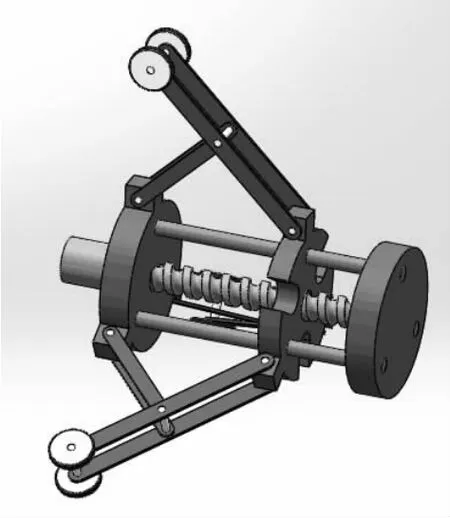
图2 行走部分
结构组成:整个行走部分由步进电机控制的滚珠丝杠、丝杠螺母、三块亚克力板、三条驱动腿、三个由直流电机驱动的马达、三根光轴和直线轴承组成。
工作原理:由步进电机驱动的丝杠通过软件控制可以实现丝杠螺母上下移动的距离,同时丝杠螺母固定在中间的亚克力板上面带动板来回移动。三根光轴与直线轴承配套可以起到一个稳定的作用,使中间的亚克力板能够平稳的上下移动,这样就可以实现三条腿的向外扩张与收缩,使其能够紧贴管道内壁以适应不同的管径。在贴紧内壁之后,腿部末端装有三个直流电机驱动的轮子,通过软件可以控制电机转动,最终就可以实现整个机构在管道中的前进和后退。
2.3 工作部分方案选择
通过学习国内外先进的管道机器人结构,作者发现现如今产品的工作部分都是固定外径结构的,在清扫不同的管道时不能自身调节工作外径,需要不断地更换毛刷。为此作者自行创新设计了一个能够自行调节外径用以适应不同管道内径的工作结构,这样会使产品的使用更加方便与快捷。具体结构见图3。

图3 工作部分
结构组成:整个工作部分由毛刷、伸缩杆和管径调整部件组成。
工作原理:工作部分如图3所示,中间的管径调整部件通过旋转可以实现三个伸缩杆的向外拉伸与向里收缩,其实质上是构成了三个曲柄滑块机构,通过这三个曲柄滑块机构控制整个清扫毛刷调整外径用于适应不同的管径。旋转中心连接直流电机马达,通过软件编程可以实现电机带动整个工作部分运转(在这个过程中管径调整部件也随着电机一起转动,它只起一个控制毛刷外径的作用),用毛刷清扫管道内壁达到预期目的。
2.4 结构的合理性及参数的合理性
作者自行设计的管道清扫机器人在结构的布置上较为合理,首先,整个机器人的重量集中在后面的驱动部分,这样保证了机械结构的重量集中在后面,使整个机器人在管道中能够保持平稳的状态。其次,在设计工作部分时,为了适应不同的管径,我们设计了旋转控制零件,用于控制毛刷的工作半径,使得工作更加方便。
2.5 机械系统总体方案
经过大家的努力,最后设计出来的机械系统总体方案的三维图如图4所示。

图4 机械系统总体方案图
3 关键零部件结构设计
为实现毛刷能够根据管径大小进行自我调整,作者在毛刷的工作部分设计了一个旋转控制零件如图5所示。
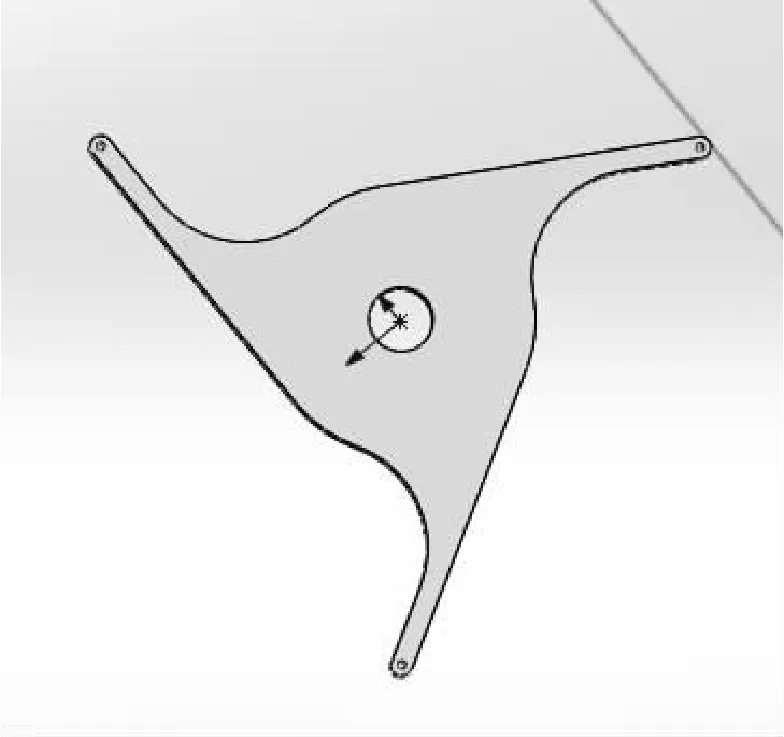
图5 旋转控制零件
这个旋转控制零件通过与几个连接杆组合形成了三个曲柄滑块机构(图6),同时在连接杆上加工了一个卡槽(图7)以防止杆件脱离,这样在毛刷转动的过程中就可以利用转动产生的离心力使得毛刷紧贴管道的内壁清扫,这样就实现了毛刷对于不同大小管径管道的自动调节。
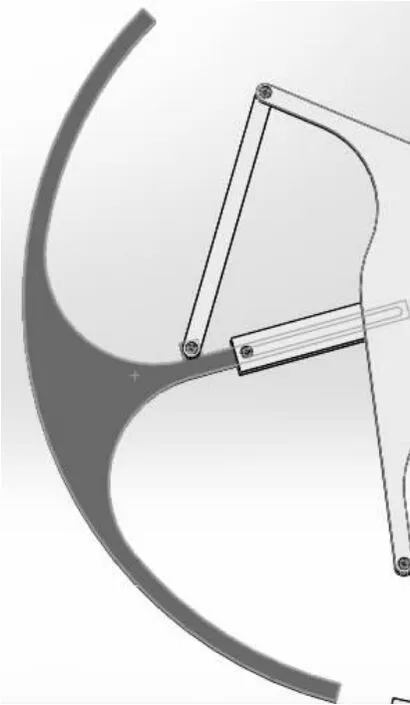
图6 曲柄滑块机构

图7 连接杆卡槽
结合管道的特点,发现连接旋转控制的零件和联轴器的连接结构使用了两个舵机控制,舵机的主要功能是控制输出轴的旋转,其输出信号是由单片机给定,并且控制机器人在90°范围内旋转,为了实现机器人的正反转运动,所以用两个舵机控制,让其一个控制正转、一个控制反转即可,通过两个舵机的联合控制便可实现机器人的前进后退动作,配合旋转结构,在弯管内也能实现前进与后退动作,使得管道机器人更加灵敏化。
运输油液的管道内壁中油的粘附性强,并由于石油中的杂质导致其黏附在管道内壁,造成清理困难的现象,作者通过在校实验发现可使用刮刀、钢刷清理,并且结合各种化学试剂,如洗涤剂等可达到高效的清洁目的,因此在机器人中装载了旋转清理结构,使用单片机控制舵机旋转速度,并且利用内置传感器进行监测清理效率。为了适应各种工作环境,我们还在前者的基础上添加了清洁机构便利拆卸结构,能更换钢刷为其他形式的清洁工具,此外可通过离合器设定最大扭矩的参数值,其作用是当机器人在遇到障碍过于坚硬时,能保证清洁部分机构能够及时停止运行,确保管道以及机器人的结构不被损坏。
4 运动轨迹分析
接下来,为了分析机器人的运动轨迹就必须先分析机器人在管道内运动状况,经分析得出机器人通过弯道的运动状态可分为以下两种:
第一种称为过渡阶段,此时将管道机器人视为一个整体、简化为一个单元体,其在弯管处的运动是二维平面运动,先假设该单元体进入指定弯道,其中心轴线与管道中心曲线相切,并沿着给定的弯管曲率半径行走,如图8所示,给定如下参数:机器人长为L=70mm,管道曲率半径为R=120mm,管道直径为D=80mm,取工程中常用的R/D=1.5,管道的环绕角度为90°。
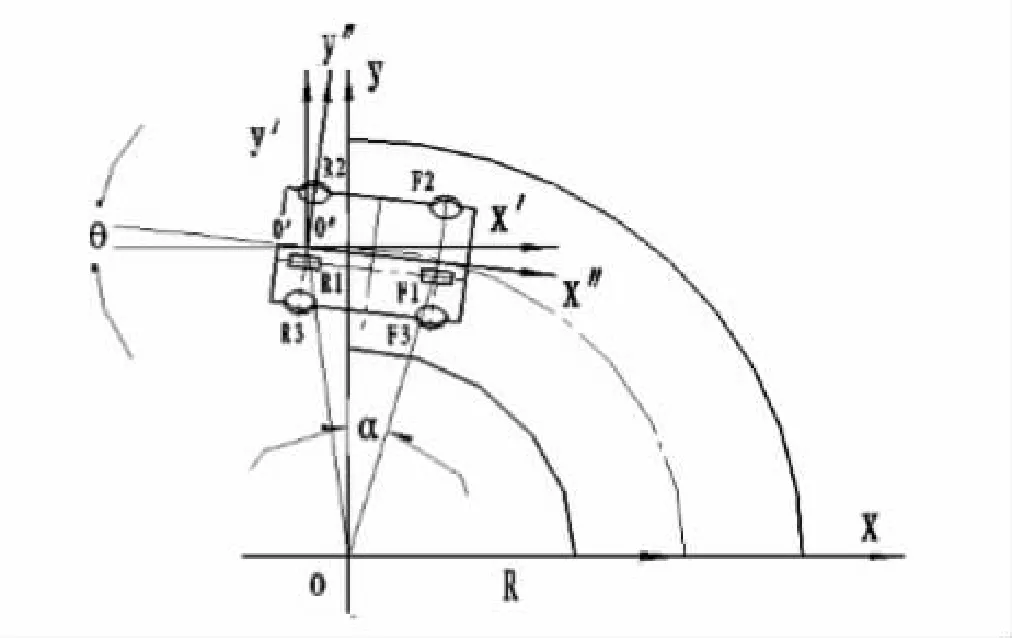
图8 运动转迹分析
第二种称为旋转阶段,此时单元体整体进入了弯管内,它的运动轨迹是圆弧,其曲率半径已知,若假设单元体是以某种方式进入弯管的,而且假设行走轮是刚性的,如图8所示。当行走轮处于过渡段的弯管处,则行走轮在这一段时间不会与管道的内壁接触,此时称行走轮的边缘点为可能接触点。此时,毛刷恰好可以清理内壁杂物,且转弯不被卡死。而旋转中心连接直流电机马达,可以带动整个毛刷旋转起来,达到清洁管道内壁的目的。
5 结束语
20世纪70年代以来,石油化工天然气及核工业等产业迅速发展,各种管道作为一种重要的物料输送设施,得到了广泛应用。灰尘、物料残留物等杂质不可避免地会附着在长时间工作的管道中。同时,多数管道安装环境,人们不能直接到达或不允许人们直接进入。管道清扫机器人是能够在水平管道自由运动完成清扫的一种自动机械装置,广泛应用于工业、农业、餐饮服务业等,伴随各种新能源的出现,管道清扫机器人有着很广阔的市场发展。该装置可以对管道内部进行清洁。该装置成本低廉、工作精准高效、节省大量人力,可广泛地应用于管道清洁的处理企业,对保护环境具有较好地推广应用价值。
猜你喜欢
吉林电力(2022年1期)2022-11-10
机床与液压(2022年8期)2022-09-19
煤气与热力(2021年7期)2021-08-23
建材发展导向(2021年11期)2021-07-28
煤气与热力(2021年5期)2021-07-22
文物季刊(2021年1期)2021-03-23
商品与质量(2020年48期)2020-11-26
汽车实用技术(2020年4期)2020-04-10
汽车与新动力(2013年3期)2013-03-11
文学港(2011年3期)2011-11-21
