一种MEMS多环谐振陀螺的品质因数在线测试方法
2021-12-06 03:14任静波朱欣华
中国惯性技术学报 2021年4期
任静波,周 怡,朱欣华,周 同,苏 岩
(南京理工大学 机械工程学院,江苏省复杂运动体智能导航与控制研究中心,南京 210096)
MEMS多环谐振陀螺是一种同时能兼顾固体波动陀螺和MEMS陀螺两类陀螺优良特性的新型微陀螺,具有简并正交的驱动模态和检测模态,可通过敏感谐振子振动时激发出弹性驻波的哥氏效应来实现角速率和角度的测量。MEMS多环谐振陀螺与固体波动陀螺(如半球、酒杯型、圆筒型谐振陀螺)相比,除了敏感结构全对称、品质因数高、谐振频率对称性好、抗干扰能力强和温度系数小等优点,还具有结构简单、可靠性好、体积小以及便于批量化集成制造的优势,因此被广泛应用于消费电子、工业控制、航空航天和军事等领域[1]。
陀螺的品质因数是描述陀螺谐振子振动特性的参数,能够影响陀螺灵敏度和分辨率等性能指标。品质因数越大,陀螺处于工作状态时其振动幅值和振动频率越稳定。增大陀螺的品质因数,有利于减小阻尼耦合,改善陀螺的驱动效率,提高陀螺的可靠性和长期稳定性[2]。因此,为了获取陀螺的高品质因数,通常采用真空封装技术完成陀螺封装。而品质因数的测试工作也成为了评估陀螺性能的重要途径,对高品质因数陀螺结构设计和封装技术的误差机理分析具有重要作用。传统品质因数的测试方法主要有时域测量法和频域测量法。时域测量法基于陀螺谐振子自由振荡时振动位移瞬态响应的衰减特性,通过采集陀螺振荡衰减过程中的振动位移幅值信息,拟合出位移幅值衰减曲线来计算陀螺的品质因数值。为了获取陀螺谐振子的振荡衰减曲线,通常采用正弦激励[3]或阶跃激励[4]的方式来迫使陀螺振动。频域测量法则是通过扫频实验确定陀螺振动响应的半功率带宽点和谐振频率来计算陀螺的品质因数[5,6]。而以上两类品质因数测试方法在测试过程中都需要预留一定的时间来进行数据采集和处理,这在一定程度上会影响品质因数测试工作的开展效率。
为了进一步提高品质因数测试效率,简化测试流程。本文提出了一种新的应用于MEMS多环谐振陀螺品质因数在线测试方法。采用锁相环和自动增益控制技术实现MEMS多环谐振陀螺的驱动闭环,通过提取锁相环输出的谐振频率和陀螺谐振子振动位移稳态解的幅值解算品质因数。该方法不需要通过数据采集、离线处理等步骤就可以在线获取陀螺的品质因数,极大地提高了品质因数的测试效率。仿真和实验结果验证了该方法的正确性和可行性。
1 MEMS多环谐振陀螺的振动特性分析
MEMS多环谐振陀螺的结构简图如图1所示。由辐条把多个半径递增的同心环连接在一起形成多环结构,中心锚点再将多环结构与陀螺衬底固定连接作为MEMS多环谐振陀螺的谐振器。而陀螺的电极分布于多环谐振子最外层同心环的外侧,由24个离散电极组成。MEMS多环谐振陀螺具有简并正交的驱动模态和检测模态。每个模态都被分配了6个电极。在驱动模式下,DB+和DB-用于差分驱动,SB+和SB-用于差分检测,DTB+和DTB-用于驱动模态频率调谐;而在检测模式下,DA+和DA-用于差分驱动,SA+和SA-用于差分检测,DTA+和DTA-用于检测模态频率调谐。其余12个电极QA、QB均为正交抑制电极,均匀分布在最外层同心环的外侧用来抑制陀螺的正交误差。
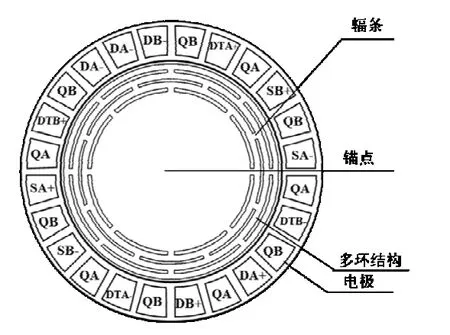
图1 MEMS多环谐振陀螺的机械结构示意图Fig.1 Mechanical structure of the MEMS disk resonator gyroscope
在理想情况下,MEMS多环谐振陀螺可以被看做一个由质量、弹簧和阻尼器组成的二自由度运动系统[6,7]。如图2所示为MEMS多环谐振陀螺的动力学简化模型。x轴是驱动模态的运动方向,y轴是检测模态的运动方向,z轴为外界角速度输入的方向。m表示沿x、y轴方向的有效质量,kx、ky分别表示沿x、y轴方向的刚度系数,cx、cy则表示为沿x、y轴方向的阻尼系数。设静电驱动力为Fx,对陀螺在驱动方向上的运动进行受力分析,陀螺驱动模态的动力学方程可表示为:

图2 MEMS多环谐振陀螺的动力学模型示意图Fig.2 Dynamic model of the MEMS disk resonant gyroscope

设陀螺的驱动模态受到一稳频恒幅的交流静电驱动力Fx=Fsin (ωdt)作用,其中F为静电驱动力的幅值,ωd为静电驱动力的频率。将Fx代入式(1)可求解出陀螺驱动模态的振动位移:
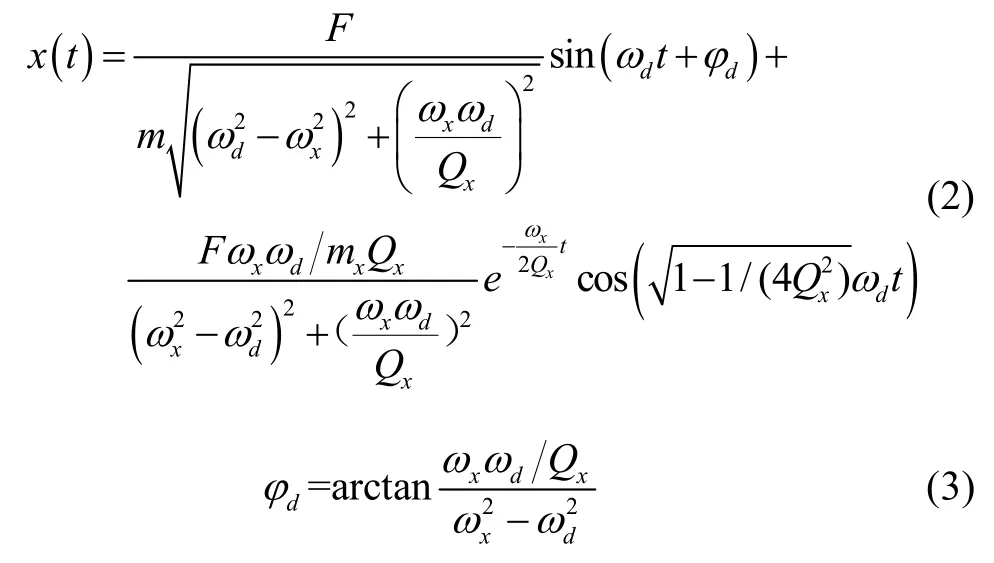
从以上分析可知,在稳频恒幅的交流静电驱动力作用下,MEMS多环谐振陀螺驱动模态的振动是陀螺这个二阶振荡系统输出的瞬态响应和稳态响应的复合运动。在驱动稳定后,陀螺谐振子以频率ωd作简谐振动。当静电驱动力的频率ωd等于陀螺驱动模态的固有谐振频率ωx时,可求解出在稳态条件下陀螺驱动模态的振动位移:
式中F为静电驱动力的幅值,m为陀螺谐振子的等效质量,Qx为驱动模态的品质因数,静电驱动力的频率ωx=ωd。为此,可通过提取MEMS多环谐振陀螺被稳定驱动时产生的振动位移稳态解幅值来测量陀螺的品质因数。
2 MEMS多环谐振陀螺品质因数在线测试方法
本文提出一种应用于MEMS多环谐振陀螺品质因数在线测试方法。首先,采用锁相环(PLL)和自动增益控制(AGC)实现对MEMS多环谐振陀螺的闭环驱动。MEMS多环谐振陀螺被稳定驱动后产生的驱动位移信号经过振动位移-电压转换电路的转换后从驱动模态检测电极端(SB+、SB-)输出被送入驱动闭环回路中,PLL模块用来跟踪陀螺驱动模态谐振频率和相位变化并生成相互正交的正余弦信号作为驱动和检测用的载波调制信号[8,9],而本文还需要将锁相环跟踪到的驱动模态谐振频率ωx直接输出。AGC模块产生稳定的幅值信号后与PLL模块输出的载波调制信号相乘调制产生恒幅稳频的静电驱动力信号Fx,送入驱动模态驱动电极端(DB+、DB-)实现对陀螺的差分驱动,至此完成MEMS多环谐振陀螺的稳定驱动。最后,通过提取在稳定状态下驱动模态检测端输出的振动位移信号幅值、锁相环跟踪到的驱动模态谐振频率ωd、驱动模态激励端的驱动静电力幅值F,再结合陀螺谐振子的等效质量m来计算MEMS多环谐振陀螺的品质因数Qx。该方法的总体框架如图3所示。
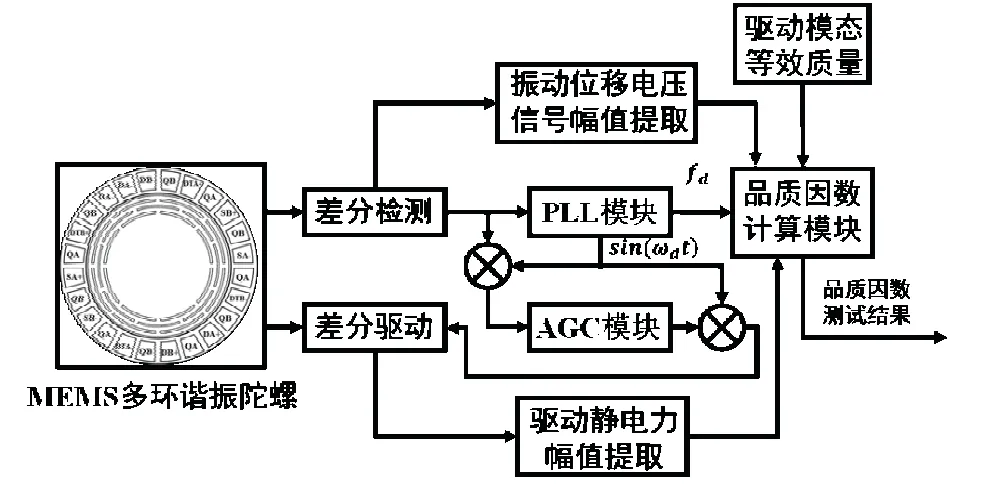
图3 基于闭环驱动的品质因数测试方法原理框图Fig.3 Block diagram of quality factor testing method based on drive closed-loop
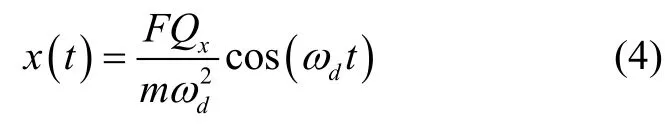
设振动位移-电压转换电路的增益为KXV,结合之前对MEMS多环谐振陀螺的振动特性分析,可以得到驱动模态品质因数Qx的表达式:

3 MEMS多环谐振陀螺的驱动闭环设计
3.1 锁相环设计
在陀螺的闭环驱动系统设计中,AGC+PLL的双闭环驱动设计应用较为常见[10-12]。锁相环的特点是能够实时追踪到陀螺驱动模态谐振频率和相位变化,保持陀螺驱动模态的长期稳定性;自动增益控制则利用线性放大和压缩放大的有效组合对陀螺的振动位移信号幅值进行调整[13,14],将陀螺谐振子的振动幅度始终保持在一个恒定的状态。本文所提出的品质因数在线测试方法需要实时的驱动模态谐振频率和稳定的振动位移信号幅值。因此,本文采用AGC+PLL的双闭环驱动设计来实现对MEMS多环谐振陀螺的稳定驱动控制以此获得用来计算品质因数Qx的相关参数。
如图4所示为锁相环回路框图。锁相环回路中主要包括鉴相器(PD)、环路滤波器(LF)和数控振荡器(NCO)。其中,鉴相器由乘法器和鉴相滤波器组成,通过正弦相乘解调来提取驱动检测电压和数控振荡器输出的反馈信号之间的相位差;环路滤波器生成频率控制信号来控制数控振荡器输出信号的频率;数控振荡器在环路工作稳定后能够输出与输入信号频率相位对应的稳频信号。

图4 锁相环回路框图Fig.4 Block diagram of phase-locked loop
3.2 自动增益控制设计
如图5所示为自动增益控制回路框图。

图5 自动增益控制回路框图Fig.5 Diagram of automatic gain control loop
自动增益控制回路主要包括幅值检测器、幅值比较器和比例积分控制器。幅值检测器对陀螺输出的驱动检测电压信号进行幅值解调后得到反映陀螺振动位移的直流分量,将该幅值信号送入幅值比较器与设定的参考幅值信号进行比较,可得到幅值误差信号。经过数字比例积分控制器对幅值误差进行调整最终可输出一恒幅直流信号,该恒幅信号与锁相环输出的正弦载波信号相乘调制后用来作为陀螺的驱动电压信号,经过V/F转换电路即可得到恒幅稳频的静电驱动力信号。
4 仿真与实验
4.1 仿真验证
本文使用Matlab仿真来验证所提出的品质因数在线测试方法。通过Simulink软件构建出整个MEMS多环谐振陀螺品质因数测试系统的仿真模型。如图6(a)所示为该品质因数测试系统全仿真模型。主要包括MEMS多环谐振陀螺的表头模型、锁相环模块、自动增益控制模块和品质因数计算模块;图6(b)所示为PLL模块的仿真模型;图10(c)所示为AGC模块的仿真模型;图10(d)所示为品质因数计算模块的仿真模型。
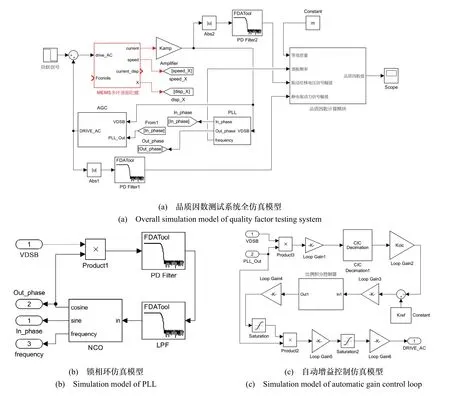

图6 MEMS多环谐振陀螺品质因数测试系统仿真模型Fig.6 Simulation model of the MEMS disk resonator gyroscope’s quality factor testing system
为了验证上述仿真模型的有效性,对陀螺表头结构模型中的品质因数Qx进行设定,并记录品质因数Qx在被设定为不同值的情况下,MEMS多环谐振陀螺品质因数仿真测试系统的测试结果,如表1所示。
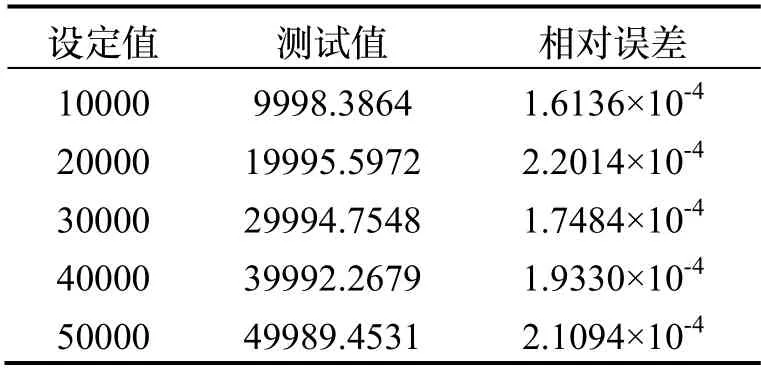
表1 品质因数 xQ测试结果Tab.1 Quality factor testing results
数据处理结果表明:在仿真情况下的品质因数Qx测试的相对误差都保持在10-4量级上,证明了所提出方法是有效可行的。
4.2 实验验证
为了验证这种应用于MEMS多环谐振陀螺品质因数在线测试方法的有效性,在基于FPGA的陀螺测控电路验证平台设计了该品质因数测试系统。如图7所示为基于FPGA的陀螺测控电路验证平台,该平台主要包括实验室研制的MEMS多环谐振陀螺、模拟接口电路板、16位AD/DA转换模块和FPGA开发板,FPGA开发板选用的是Digilent Nexys4 DDR Artix-7板卡。该测试系统的某些电学参数如表2所示。

图7 基于FPGA的陀螺测控电路验证平台Fig.7 Gyroscope measurement and control circuit verification platform based on FPGA
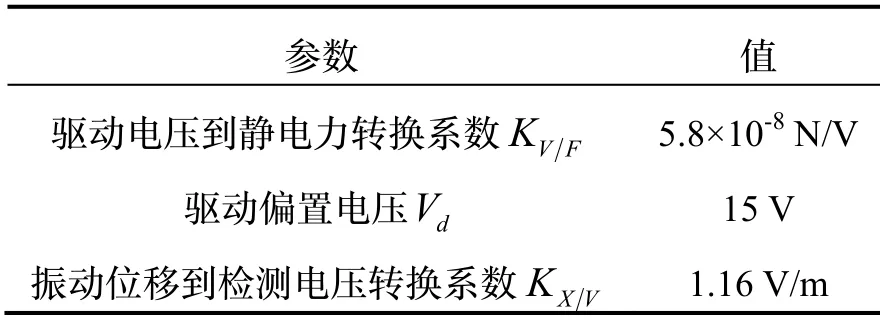
表2 品质因数在线测试系统的电学参数Tab.2 Electrical parameters of online quality factor testing system
在室温条件下对某一批次MEMS多环谐振陀螺分别用所提方法和传统的扫频法进行品质因数测试工作,测试结果如表3所示。
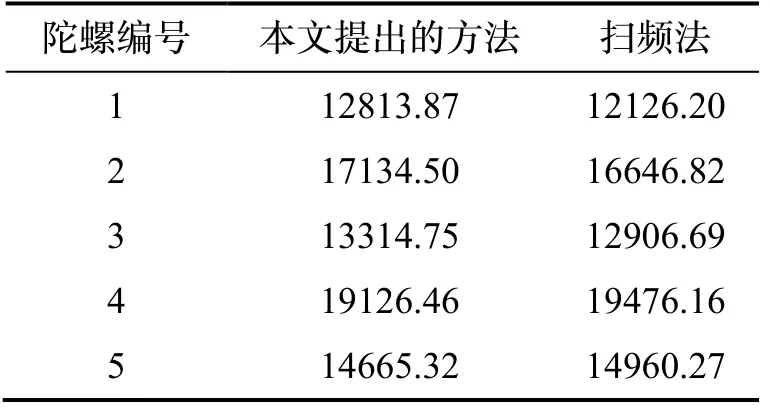
表3 不同方法下品质因数Qx测试结果比较Tab.3 Comparison of quality factor testing results with different methods
可见本文提出的基于闭环驱动的品质因数在线测试方法与传统的品质因数测试方法(如扫频法)得到的结果相差不大。而采用该方法在线测量MEMS多环谐振陀螺的品质因数只需要等待闭环驱动稳定后即可,而扫频法则需要几十分钟甚至更长时间,因此本文提出的方法大大提高了品质因数测试的工作效率。
如图8所示为对某一MEMS多环谐振陀螺进行测试品质因数时系统内某些参数的实测波形图。如图8(a)所示为陀螺驱动检测电压幅值波形;如图8(b)所示为自动增益控制下恒幅直流信号波形;如图8(c)所示为30分钟内采集到的品质因数计算值。由实验结果可看出该闭环驱动系统能够在启动后0.6 s左右稳定下来,使用该品质因数测试方法所消耗时间明显少于传统的那些品质因数测试方法。


图8 基于闭环驱动的品质因数测试系统实测信号Fig.8 Measured signal of quality factor testing system based on drive closed loop
5 结 论
本文针对MEMS多环谐振陀螺品质因数的快速有效测定问题,提出了一种基于闭环驱动的品质因数在线测试方法。采用锁相环和自动增益控制实现对MEMS多环谐振陀螺的闭环驱动。在稳定驱动条件下,通过提取锁相环输出的谐振频率和振动位移稳态解幅值来获得陀螺的品质因数。与传统的扫频法和振荡衰减法相比,不需要通过数据采集、离线处理等步骤就可以在线自动获取陀螺的品质因数,缩短了测试时间,简化了测试流程,极大地提高了MEMS多环谐振陀螺品质因数的测试效率。仿真和实验结果表明,本文提出的方法能够实现对MEMS多环谐振陀螺品质因数的快速有效测量。下一步的研究工作将着眼于提高该方法的测试精度。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
江苏农业科学(2017年7期)2017-05-23
现代工业经济和信息化(2016年8期)2016-05-17
电测与仪表(2016年5期)2016-04-22
中国洗涤用品工业(2016年2期)2016-02-28
电测与仪表(2015年9期)2015-04-09
新媒体研究(2014年11期)2014-09-01
电测与仪表(2014年8期)2014-04-04