
单镜头无人机飞行参数优化方案
2021-12-06 02:06郑阳龙徐文兵
桂林理工大学学报 2021年3期
郑阳龙, 徐文兵, 2, 3, 梁 丹, 3
(1.浙江农林大学 环境与资源学院, 杭州 311300; 2.同济大学 测绘与地理信息学院, 上海 200092;3.浙江同创空间技术有限公司, 杭州 311300)
0 引 言
无人机(UAV)遥感是以无人机为平台的低空航空摄影, 是近年新发展起来的航空摄影测量技术, 应用领域从军用扩展到了民用和商用市场[1]。与传统方法获取遥感影像相比, 无人机遥感具有费用低、操作灵活和更好的空间分辨率等优点[2-3]。无人机倾斜摄影是从正射影像的基础上变成从1个垂直、4个倾斜共5个角度方向进行影像采集, 建立真实场景的数字三维模型, 能最直观和真实地反映现实世界[4-8], 通过三维模型可以获得所需要目标物体的高度、距离、大比例尺地形图以及数字正射影像图等数据, 并在各领域得到广泛应用, 如智慧城市[5]、地籍测量[9]、矿山环境治理勘查[10]等。无人机航高相对较低, 采用的相机为普通非测量型相机, 获取的遥感影像存在相片数量大、像幅小和影像重叠率不规则等特点[11], 因此对航高和云台俯仰角的设置以及地面像控点密度的布设不能依靠传统航空摄影测量的规范和经验。国内外相关学者对无人机不同飞行参数进行了相关研究: 张纯斌等[12]针对小型消费级无人机进行了6种不同航高下三维模型地形测量数据的精度验证, 结果表明地形精度达到了厘米级; 万剑华等[13]和赵艳玲等[14]针对不同像控点的分布和数量, 进行了精度验证实验, 得到像控点个数在一定范围内时, 实景三维模型精度随像控点个数增加而提高的结论; Agüera-Vega等[15]针对不同航高、地形和控制点数量进行了综合分析, 得到的最优组合达到厘米级精度。
目前, 无人机的应用研究广泛展开, 也取得了丰富的研究成果, 但仪器设备、地形环境、作业方式的差异性有待于进一步完善研究, 以促进无人机倾斜摄影测量在国土资源调查等方面的应用。单镜头无人机单次飞行时只能拍摄一个方向的影像照片, 在对一块目标样地进行航拍时, 需要飞行5次, 进行5个镜头方向拍摄, 效率相对较低。五镜头相机虽拥有良好的性能, 但设备昂贵, 而单镜头无人机机动灵活、价格实惠、便于推广应用, 适合小范围内实景三维模型重建。鉴于不同飞行参数获取影像数据的精度不同, 本文针对航高、云台俯仰角和像控点密度3个主要参数, 通过数据检测与分析, 研究不同参数最优组合的数据采集方案, 以提高实景三维模型的质量和可靠性。
1 试验区域概况及技术方案
1.1 试验区概况
试验区域位于浙江省杭州市浙江农林大学东湖校区(119.72°E, 30.25°N)。试验区为丘陵地形, 地形起伏变化大, 地势由北向南逐渐增高, 面积约为0.25 km2,建筑物为低层且分散, 无大面积玻璃幕墙面和强电磁设施, 对卫星信号干扰小。
1.2 技术方案
实景三维模型重建的主要流程包括影像数据采集、地面控制点布设和内业处理(图1)。针对单镜头无人机, 通过测区内试验建立3种不同飞行高度、3种不同云台俯仰角和5种不同像控点密度的三维模型并进行精度评价, 获得单镜头无人机最优飞行参数优化方案。
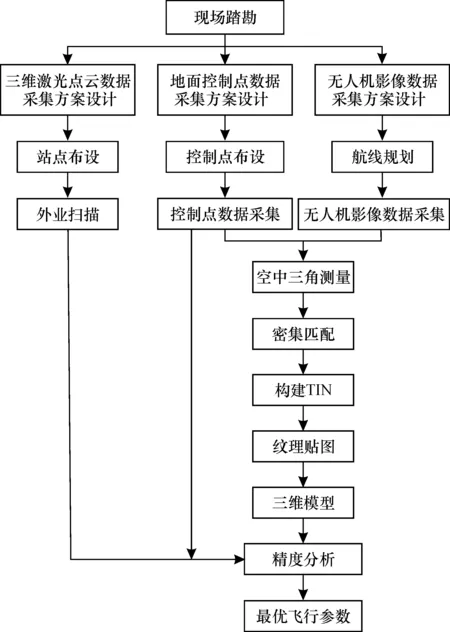
图1 单镜头无人机实景三维模型重建最优飞行参数优化方案
2 数据获取
2.1 数据采集
2.1.1 无人机数据采集 航拍设备为大疆精灵4Pro(Phantom 4 Pro)无人机, 具有灵活、成本低和快速起飞拍摄等优点, 其中相机为2 000万像素。使用Litchi地面站航线规划软件设置不同的航高、云台俯仰角等飞行参数。经实地踏勘后, 选取图书馆前面的广场空地作为起飞平台。影像获取时间为2017年7月, 飞行时间分别为08: 00—10: 00和14: 00—16: 00。飞行气象条件为天气晴朗, 少云, 微风。根据常规航空摄影测量及航拍任务的实际需要, 将航向重叠度和旁向重叠度分别设置为80%和60%, 3种航高分别设置为60、110和150 m, 3种云台俯仰角(设竖直向下为-90°, 水平方向为0°)分别设置为-60°、-45°和-30°, 飞行架次共30次, 获得12 960张相片(图2)。

图2 无人机飞行路线示意图
2.1.2 地面控制点数据采集 地面控制点包含像控点和检查点, 其中像控点对无人机影像进行相片纠正, 检查点用以评价倾斜摄影三维模型精度。地面控制点测量采用华测i70 RTK接收机, 该设备实时动态测量的平面定位精度为±(8+10-3d)mm、高程定位精度为±(15+10-3d)mm, 其毫米级精度满足大比例尺地形图精度要求。根据试验区实际情况及控制点布设原则[16], 地面控制点选择在实地、影像上能明确辨认、无遮挡区域, 均布设在硬化地面上, 以保证控制点的稳定性。图书馆周边控制点布设如图3所示。利用ZJCORS的网络RTK采用固定支架测定控制点的三维坐标, 坐标系统采用CGCS2000, 投影为高斯3°带投影, 中央子午线为120°E, 单位为m。
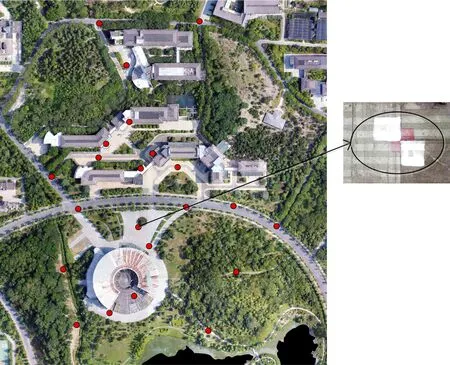
图3 地面控制点空间位置分布图
2.1.3 三维激光点云数据采集 地面三维激光扫描仪可以获取对目标发射激光光束后向散射回波, 从而获取目标物体的表面特性[17]。为了检测单镜头多旋翼无人机测量建筑物的精度, 利用三维激光扫描仪扫描测区范围内部分建筑物, 通过点云数据采集建筑物墙面试验点之间的相对距离。根据试验区建筑物分布和周围植被生长状况, 选择合适的站点, 在傍晚对目标建筑物进行扫描, 获取点云数据[18]。试验共设8个测站进行全景或区域扫描, 站点位置分布如图4所示。

图4 三维激光扫描站点分布图
2.2 数据处理软件
2.2.1 影像数据 目前国内外有多种软件支持处理无人机航拍的影像, 其中包括Pixel Factory、Photoscan和ContextCapture等。不同软件在处理影像数据上有各自的特点。ContextCapture具有对数据需求量小、模型真实、兼容多种数据格式以及自动化程度高等优点, 能自动、快速通过影像数据进行建模。利用ContextCapture生成的倾斜摄影三维模型质量良好、纹理清晰以及无大面积噪声, 可依据软件对三维模型进行多角度多尺度浏览和量测, 提取地面控制点的平面位置、高程以及长度数据。实景三维模型如图5所示。

图5 实景三维模型
2.2.2 激光点云数据 地面三维激光扫描仪通过扫描目标建筑物获得相应的点云数据, 使用地面三维激光扫描仪配套Cyclone软件处理获取的三维激光点云数据。利用Cyclone软件提供的度量工具提取水平和竖直方向上两点之间的长度。
3 数据分析
3.1 试验点空间位置精度分析方法
利用地面控制点中的检查点和建筑物墙立面线段的长度对单镜头无人机倾斜摄影测量成果进行精度评定, 精度的验证指标采用均方根误差RMSE。
(1)
(2)
(3)
式中:RMSEXY为平面均方根误差;RMSEZ为高程均方根误差;RMSEl为线段长度均方根误差;Xi、Yi和Zi分别为三维模型上的坐标值;X、Y和Z分别为GNSS-RTK实测的坐标值;Lj为三维模型上的长度测量值;L为地面LiDAR测量的长度;n为检查点个数;m为线段条数。
3.2 不同航高的精度分析
航高在60、110、150 m时, 单镜头无人机倾斜摄影测量的三维模型的点位平面误差最小值为0.06 m, 最大值为0.15 m; 高程误差最小值为0.10 m, 最大值为0.32 m。根据《数字航空摄影测量 空中三角测量规范》(GB/T 23236—2009)(以下简称“规范”)中规定, “1∶500成图比例尺时, 三维模型平面精度不超过0.175 m, 高程精度不超过0.28 m; 1∶1 000成图比例尺时, 三维模型平面精度不超过0.35 m, 高程精度不超过0.35 m”, 航高60和110 m精度均高于规范1∶500成图比例尺要求; 航高150 m的平面精度高于规范1∶500成图比例尺要求, 高程精度满足规范1∶1 000成图比例尺要求。航高在60、110、150 m时, 三维模型的建筑物墙立面线段长度精度的水平误差最小值为0.05 m, 最大值为0.12 m; 竖直误差最小值为0.08 m, 最大值为0.14 m。航高为60 m时, 墙立面线段长度误差最小, 水平方向和竖直方向分别为0.05和0.08 m(表1)。
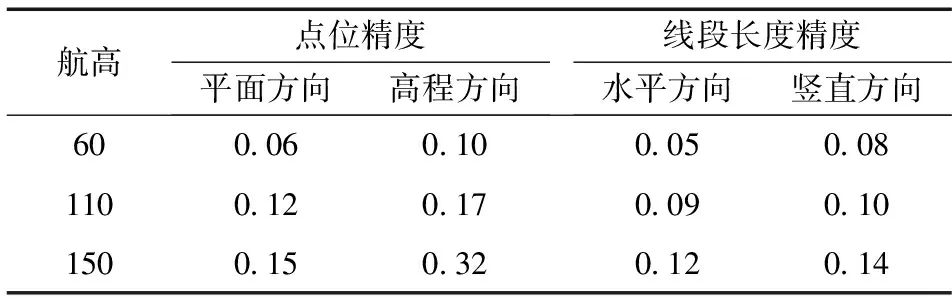
表1 3种航高的误差统计
3种航高的点位高程误差均大于平面误差以及线段长度竖直方向误差均大于水平方向误差, 说明后方交会计算两像片的外方位元素以及立体模型的绝对定向需要像控点的三维坐标, 而利用RTK测量地面控制点时, 其水平方向的测量精度优于高程方向。
3.3 不同云台俯仰角的精度分析
根据规范, 云台俯仰角为-45°时, 三维模型点位平面误差为0.10 m, 高程误差为0.11 m; 云台俯仰角为-60°时, 点位平面误差为0.11 m; 云台俯仰角为-30°时, 点位高程误差为0.12 m, 均满足1∶500成图比例尺要求。云台俯仰角为-60°时, 点位高程误差为0.46 m; 云台俯仰角为-30°时, 点位平面误差为0.33 m, 均大于1∶1 000成图比例尺要求。但云台俯仰角在-60°、-45°、-30°时, 建筑物墙立面线段长度水平方向误差最小值为0.09 m, 最大值为0.11 m; 竖直方向误差最小值为0.08 m, 最大值为0.12 m。云台俯仰角为-45°时, 墙立面线段长度误差最小, 水平方向和竖直方向分别为0.08和0.09 m(表2)。
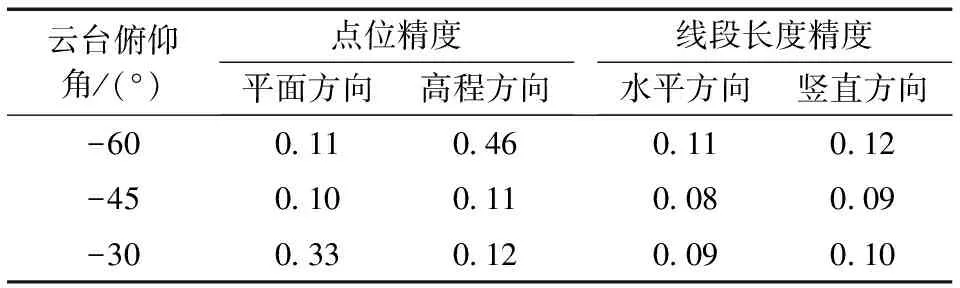
表2 3种云台俯仰角的误差统计
云台俯仰角为-60°时, 点位高程误差为0.46 m, 平面误差为0.11 m, 高程误差明显高于水平方向; 云台俯仰角为-30°时, 点位平面误差为0.33 m, 高程误差为0.12 m, 平面误差较明显高于高程方向; 云台俯仰角为-45°时, 点位水平误差为0.08 m, 高程误差为0.09 m, 两者相当, 且在不同云台俯仰角中的点位精度最高。经分析, 当相机倾斜角不同时, 倾斜摄影的像片在垂直和水平方向上的像点位移量不同。由三角函数tan 45°=1可知, 在相机倾斜角为45°时, 像点位移量在水平和垂直方向分布相同; 相机倾斜角小于45°时, 像点位移量垂直方向多于水平方向; 相机倾斜角大于45°时, 像点位移量水平方向多于垂直方向。
3.4 不同像控点密度的精度分析
像控点密度在0、16、24、32、40个/km2时, 单镜头无人机倾斜摄影的三维模型点位平面误差的最小值为0.06 m, 最大值为1.04 m(表3); 高程误差的最小值为0.06 m, 最大值为34.99 m。当像控点密度为0个/km2时, 平面误差为1.04 m, 高程误差为34.99 m, 高程误差远远大于平面误差; 有像控点后的精度显著提升, 当像控点密度16、24、32和40个/km2时, 平面误差为0.06~0.10 m, 高程误差为0.06~0.11 m。像控点密度的增加可以增加多余观测量, 增强最小二乘法平差效果。根据规范要求, 除了没有像控点的三维模型, 其他都能满足1∶500成图比例尺要求, 且三维模型的平面和高程误差相当, 都为0.10 m左右, 其中像控点密度在32个/km2时精度最高, 平面和高程的误差都是0.06 m。因此无人机倾斜摄影重建三维模型时, 无人机自带GPS定位模块的单点定位误差较大, 加入像控点进行精确定向定位是必要的。
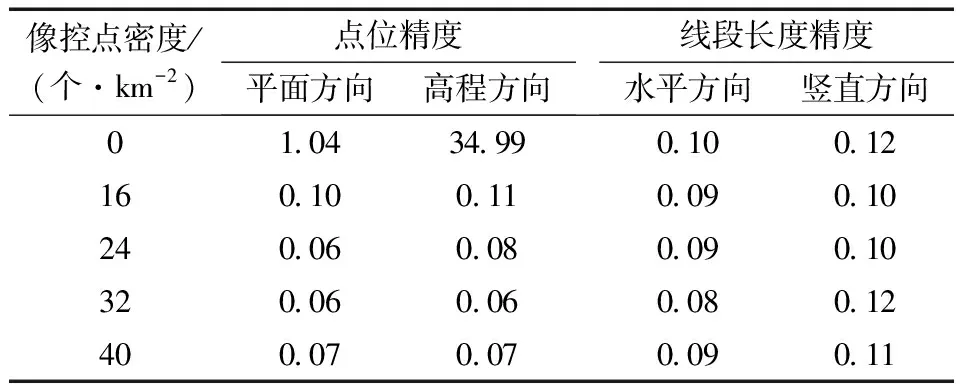
表3 5种像控点密度的误差统计
建筑物墙立面线段长度水平方向误差最小值为0.08 m, 最大值为0.10 m; 竖直方向误差最小值为0.10 m, 最大值为0.12 m(表3)。在无像控点时, 建筑物墙立面线段长度精度远高于点位精度, 说明在不需要高精度点位信息时, 可采用无像控点建模, 用以获取模型中物体的长度数据。
4 结 论
通过无人机倾斜摄影测量可以便捷、高效地构建地表三维模型, 获取资源调查行业所需的影像数据和几何尺寸信息, 已经被广泛应用, 但是单镜头多旋翼无人机在不同航高、不同云台俯仰角和不同像控点密度下的实景三维模型精度研究较少。本文设计了3种飞行高度、3种云台俯仰角和5种像控点密度, 得到以下研究结论:
(1)无人机飞行高度在60 m时, 试验点误差和墙立面线段长度误差最小, 试验点平面误差为0.06 m, 高程误差为0.10 m; 建筑物墙立面线段水平方向误差为0.05 m, 竖直方向误差为0.08 m。同时, 航高为110 m时, 试验点平面误差为0.12 m, 高程误差为0.17 m, 建筑物墙立面线段长度水平方向误差为0.09 m, 竖直方向误差为0.10 m。考虑到作业效率和模型精度, 在两者均满足精度要求的情况下, 航高110 m是最优选择。
(2)云台俯仰角为-45°时试验点和建筑物墙立面线段长度误差最小, 试验点平面误差为0.10 m, 高程误差为0.11 m; 墙立面线段水平方向误差为0.08 m, 竖直方向误差为0.09 m。
(3)像控点密度为32个/km2时, 试验点平面误差、高程误差和建筑物墙立面线段长度水平方向误差达到最小, 分别为0.06、0.06和0.08 m; 其建筑物墙立面线段竖直方向误差为0.12 m, 与其他像控点密度下的误差相近。综上, 像控点密度为32个/km2时, 建模效果最好。
(4)像控点密度为0个/km2时, 试验点平面误差和高程误差分别为1.04和34.99 m; 而加入像控点且其密度为16个/km2时, 试验点平面误差和高程误差分别为0.10和0.11 m, 并且之后误差均小于此值。像控点密度在16、24、32和40个/km2时, 建筑物墙立面线段水平方向和竖直方向均分别小于0.10和0.12 m, 并且大致相同,说明模型重建过程中加入像控点, 能有效提升模型的点位精度, 但对相对长度影响不大。
综上所述, 单镜头多旋翼无人机在飞行高度110 m左右、云台俯仰角为-45°左右和像控点密度为32个/km2时, 可获得精度最高的实景三维模型。
本文基于不同航高、不同云台俯仰角和不同像控点密度对实景三维模型重建精度的影响, 检测实景三维模型上的点位和建筑物墙立面线段长度的精度, 为快速、准确和高效获取高质量实景三维模型提供了新思路、新方法, 以及为低成本、快速、高效获取单镜头无人机遥感影像提供参数。不同机型、不同地区和不同采集方案对获取遥感影像存在差异性, 其他因素对无人机采集参数的影响有待进一步讨论。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
小学生学习指导(高年级)(2021年5期)2021-05-18
摄影之友(影像视觉)(2020年2期)2021-01-14
小学生学习指导(低年级)(2019年3期)2019-04-22
小学生学习指导(低年级)(2019年4期)2019-04-22
电子制作(2019年23期)2019-02-23
小学生学习指导(低年级)(2018年12期)2018-12-29
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
