
用于微创手术组织触诊中的FBG 传感器研发
2021-12-04 11:14甘露郑甲红
科技与创新 2021年22期
甘露,郑甲红
(陕西科技大学,陕西西安 710021)
随着医疗技术的快速发展,微创手术(MIS)逐渐实现[1]。但是,传统手术中发现的一些问题在MIS 中同样存在。例如,在进行微创外科手术期间,医护人员会暴露在手术室中发现的放射线和整形外科危害中。机器人辅助微创手术的技术成为了替代传统微创手术更好的方案,然而,机器人辅助手术过程中却是伴随着外科医生的触觉丧失。外科医生是过操作机器人来进行微创手术,手术期间医生无法直接接触人体组织并且分析人体器官,因此无法保证所进行的手术的可靠性。
众所周知,在传统手术过程中,医生是通过触觉去感知器官的异常情况,进而判断器官中是否存在肿瘤和肿块。但随着医疗机器人的普及,这种可获得的触觉信息尚未有效地集成到机器人辅助的微创手术中。这便要求机器需要具有更高精确度和灵敏度的触觉信息反馈。本文提出一种用于微创手术组织触诊中的高灵敏度FBG 传感方案,与以往的电容式传感方案不同,光纤传感器与手术期间的磁共振(MR)系统和成像系统兼容[2-3]。大量的文献中都介绍了光纤传感器在其各个领域中应用,例如,FBG 作为监测仪中应用和液体流量传感器等[4-5]。国内的研究人员也已经逐渐提出用于医疗领域中的光纤传感技术[6]。届时,FBG 传感器技术也被应用在医疗行业中很多场景中,例如人体的腔道手术、穿刺手术和腹腔镜手术等。本文的目的是解决在微创手术中触觉信息的丢失而研发的触觉传感器,根据FBG 的传感器原理,当传感器承受轴向载荷时,其结构铰链发生应变,从而使得光纤中心波长发生漂移。并基于ANSYS 有限元法对传感器结构进行静态性能分析,根据仿真结果判断传感器结构的合理性和光纤应变的有效性,最后经过载荷实验验证触觉传感器得可行性。通过上述步骤验证该设计的可行性和有效性。
1 FBG 传感原理
光纤传感技术被广泛地应用在军事、国防、航空航天、工业监测和医疗等行业中。其中,传感器技术中便使用了光纤传感本身的敏感特性,而其体积小、质量轻和抗干扰能力强的特点使其可以被应用在医疗器械的行业中。过去的研究中,学者采用的光纤类型基本为光强度调制型,其传感方法简单因此被广泛使用。但这种光纤技术存在较大的缺点,比如感精度低和受到光强度的限制等,所以已经在医疗行业中被放弃使用。本文中所介绍的是布拉格光栅光纤(FBG)属于波长调制型光纤传感技术,通过外界待测物理量对波长的调制来获取传感信息,进而实现传感检测,具有高灵敏的特性。下面便介绍FBG 的具体传感器原理。
光纤的传感原理[7]如图1 所示,中心波长漂移量主要受光纤纤芯有效折射率和光栅栅格周期的影响,FBG 反射中心波长表达式为:

图1 FBG 传感原理

式(1)中:λB为光栅的中心波长;neff为光纤纤芯有效折射率;Λ为光栅栅格周期。
当外界载荷作用于传感器结构时,其结构中的FBG 将会受到影响,接着导致光栅中有效折射率neff和栅格周期Λ发生变化,进而引起FBG 的中心波长λB发生漂移,通过中心波长的漂移量来检测力的作用大小。因此FBG 的中心波长漂移量ΔλB=(1-pe)ε·λB。
令Kε=(1-pe)·λB为应变灵敏度系数。本文中研究环境是处于假设的恒温环境中,实验过程中不发生任何的温度变化。由于本文采用掺锗的普通石英作为光纤纤芯,因此,pε≈0.22。因此可得到Kε是由FBG 的具体参数决定的,并且FBG 所受应变与中心波长漂移量呈良好的线性关系:ΔλB=Kε·ε。
2 传感器结构设计
本文提出了一种螺旋结构的传感设计,螺旋弹性体具有高灵敏结构特性,可用于传感器的结构设计中。为了实现FBG 的快速响应和灵敏率,将光纤紧密悬挂的封装在传感器结构的中间位置。因此,文中采用胶水将FBG 的悬挂固定在结构中,首先将光纤的一端固定在顶端零件的孔槽中,再通过施加预紧力的效果使得FBG 可以保持紧密悬挂在螺旋弹性体中间,并用胶水固定底端完成传感器的组装,如图2所示。

图2 FBG 传感设计方案
本文中传感器的结构材料采用的是铝合金材质。当传感器受到中心载荷时,其中紧紧悬挂着的FBG 便在结构中出现弯曲现象。再根据上个章节中的介绍,就可以将力与FBG的中心波长漂移量建立关系,从而达到本文的设计理念,实现微创手术组织触诊中的力反馈效果。接下来基于有限元仿真去验证该结构所受到的应变影响。
3 有限元仿真
基于ANSYS 对传感器结构进行了有限元分析。传感器的具体材料性能如表1 所示。首先将传感器结构进行离散化,以便分析传感器中的应变情况。再将其结构底端固定,以0.2 N为间隔施加0~1 N的轴向载荷对传感器结构进行静态分析,如图3 所示。
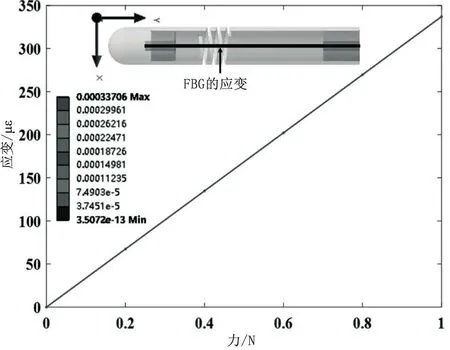
图3 静态仿真分析

表1 传感器结构的材料性能
4 静载荷实验
采用如图4 所示的静态载荷实验设备,对本文中传感器结构进行了实验测试。实验设备主要包括FBG 询问器(Wave Capture of Bay Spec,USA)、六轴力/扭矩传感器ATI(Nano43 SI-9-0.125,ATI Industrial Automation,Apex,North Carolina,USA)和NI 数据采集器(DAQ)。通过高精密线性运动平台对传感器进行载荷测试。将波长分辨率为1 pm、采样频率为100 Hz 的FBG 询问器连接到电脑端进行采集记录。本文中设定得传感器受力范围为0~1 N,此标定过程重复4 次,得到的相应的FBG 中心波长漂移量和力之间的关系。将每个载荷下捕获的平均值用于确定力与波长漂移量之间的关系,并采用最小二乘法进行线性拟合。静态载荷下校准载荷-波长曲线如图5 所示,从中可以看出,FBG 可以满足传感器的性能要求,其传感器具有较高的灵敏性,得到的传感器的灵敏度为642.56 pm/N。而FBG 的非线性可能是由装配过程中的误差和结构得自重引起的。

图4 静态载荷实验设备
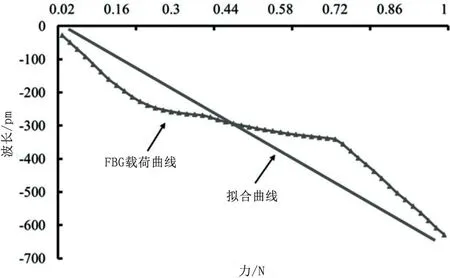
图5 静态载荷下校准载荷-波长曲线
5 结论
本文设计了一种用于MIS 组织触诊中的力传感器。传感器设计为高弹性的螺旋结构和高灵敏度FBG,通过标定实验建立输入量力与输出量波长偏移量之间的关系,目的是解决手术期间医生无法直接接触人体组织和缺乏精确的力反馈信息问题,本文设计理念的提出可达到医护人员“触诊”的效果,从而保证所进行的手术的可靠性。通过静载实验数据表明,传感器可满足力-波长的转换关系并得到较高的灵敏度和分辨率。但本实验中由于装配制造和自重等造成的误差导致传感器存在线性偏差。在未来的研究中,我们将增强传感器结构的线性响应。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
东北大学学报(社会科学版)(2022年1期)2022-02-17
海外星云(2021年6期)2021-10-14
阅读(科学探秘)(2021年8期)2021-09-01
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
红豆(2017年4期)2017-04-13
电脑爱好者(2015年17期)2015-09-10
