软体仿生机器人研究现状
2021-12-03 09:37褚凯梅朱银龙
林业机械与木工设备 2021年11期
褚凯梅, 赵 虎, 冯 凯, 吴 杰, 朱银龙
(南京林业大学机械电子工程学院,江苏 南京 210037)
近些年来,机器人成为了热门专业。传统的机器人主要是以刚性结构为主,而且已经被应用到许多行业,如工业、医药和农业[1-2]。但它不仅结构复杂,而且灵活性有限,安全性和适应性也比较差,如在抓取复杂脆弱物体、人机交互、狭窄空间操作等这些特殊应用上存在较大的挑战。软体机器人是机器人领域的一个热点,并被学术界视为一种最可能成为新一代机器人的发展方向[3-4],甚至在工业领域的应用和对社会革命的影响都非常广泛。软材料的应用程序设计和制造软手引起国内外学者和研究机构的广泛关注。学者们正在进行相关的的研究,意在从根本上解决了机械手与人和环境相互作用的问题,为解决复杂环境适应性差、灵活性差等提供了新的思路和方向。
1 软体机器人的仿生分类
机器人变形状态由软体机器人的外形结构决定,机器人的柔韧性受机器人变形能力的影响。软机器人普遍采用硅胶[5-7]、形状记忆合金(SMA)[8-10]、电活性聚合物(EAP)[11-13]等新材料制造,在制定加工制造工艺时特别容易受到限制。因此,在设计结构时就需要将机器人的变形能力、机动性和可制造性同时考虑进去。
1.1 外形仿生
生物机构一直是研究者们研究的对象,研究者通过研究生物结构,制作类似结构来实现软体机器人的动作。由Kirigami皮肤制作软体爬行机器人是Ahmad Rafsanjani课题组研制的[14],它的结构与蛇类似,主要由硅橡胶驱动器、Kirigami皮肤、控制系统组成。外形结构为圆柱状,由Kirigami皮肤包裹硅胶驱动器,Kirigami皮肤表面的屈曲引起的定向摩擦特性使机器人能够有效爬行。软体爬行机器人如图1所示。
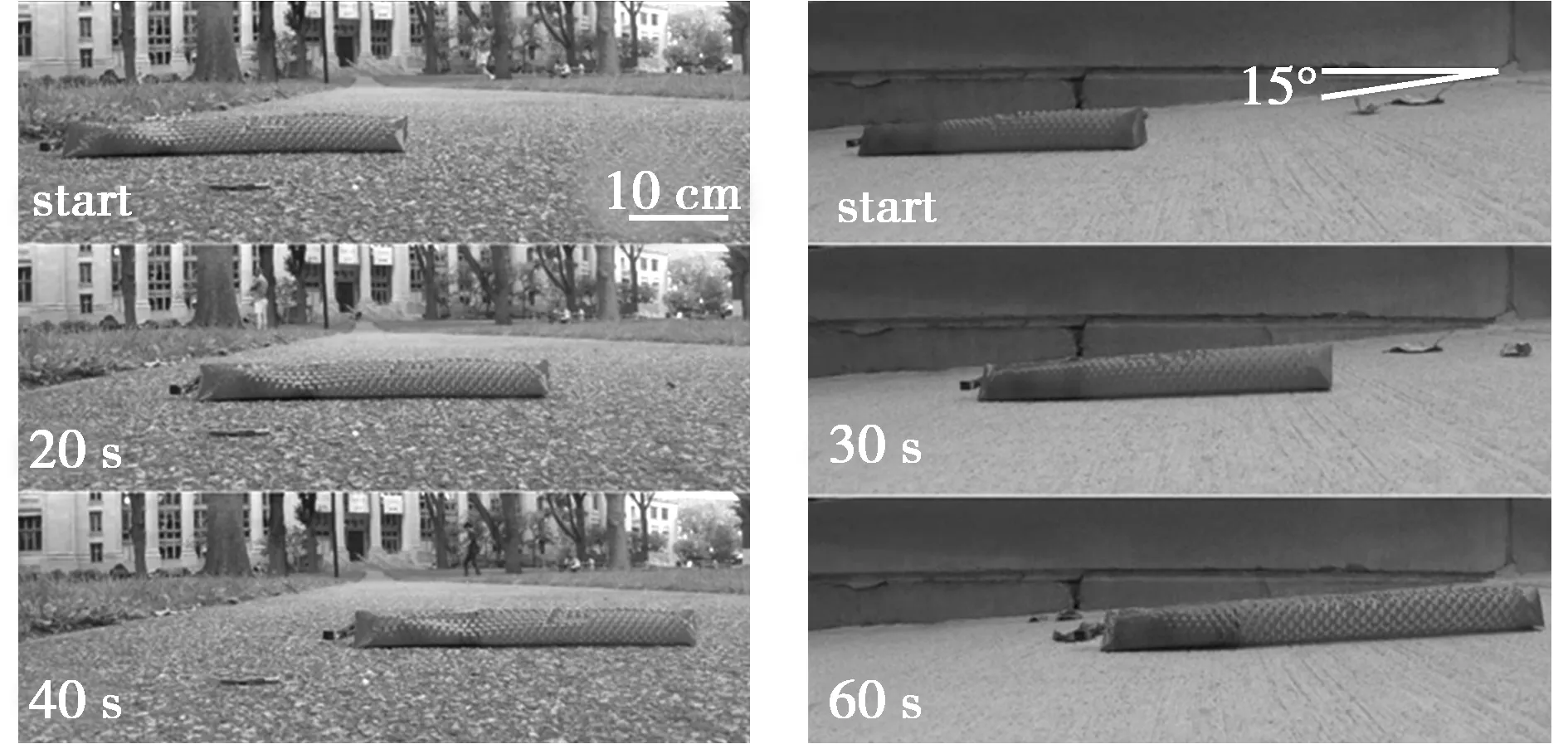
图1 软体爬行机器人
两例仿生鱼类水下机器人如图2所示。北航课题组[15]设计了一个波动性仿生鱼机器人模型,其中鳍使用多种材料三维打印制造,包括弓形背鳍、肛门软鳍和尾鳍,其刚性跨越三个数量级。我们使用了一系列的流体弹性体软致动器来模仿鱼的背和肛门倾角,以及竖起和压下肌肉,从而使鳍片变得柔软,在0.3 s内竖起或折叠,如图2a所示。在线性加速过程中,背鳍产生与尾鳍方向相反的尾流,从而产生具有时变环流和射流角度的推进射流。Suzumori提出了一种用于弯曲气动橡胶执行器的新设计和原型制作方法及其在软体蝠鲼游泳机器人中的应用[16],如图2b所示。
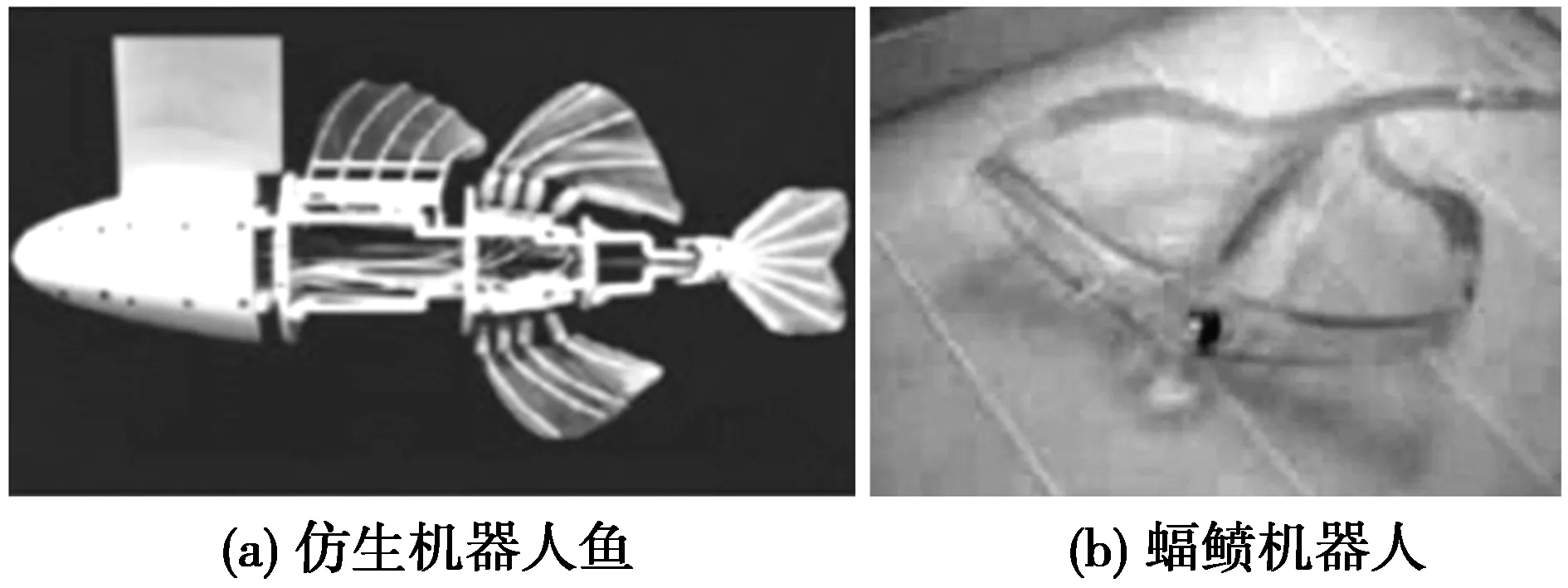
图2 水下机器人
两例仿生虫类机器人如图3所示。Shepherd等利用SMA提出了蠕虫机器人 Meshworm[17],实现了蠕动运动,而且抗冲击性非常强,如图3a所示。Sima Umrao等[18]基于空气离子电化学应变软体执行器提出一种仿生软体蝴蝶机器人。在施加0.2 Hz的2 V交流输入后,蝴蝶的行为类似于活蝴蝶,如图3b所示。

图3 仿生机器人
Marchese团队研发了一种自主软体机器人[19],利用 FEA 作为鱼尾驱动,它既是独立的,又能够进行快速连续的身体运动,能够执行快速逃生反应。软体机器鱼如图4所示。

图4 软体机器鱼
海底的章鱼引起了科学家的思考,研究了章鱼骨骼结构和运动性能。2016年,哈佛与剑桥两所大学合作研发了一种软体仿生章鱼机器人(Octobot)[20],如图5所示。该机器人由硅橡胶制作而成,身高低于2 cm,它的大脑是柔性芯片,利用压力打开内部的阀门和开关,内部液体流过通道,然后实现触手运动。Octobot的通道是通过加热易蒸发的墨水形成的。该仿章鱼机器人可以控制触手运动,从而实现章鱼机器人的爬行。章鱼内部结构如图6所示。
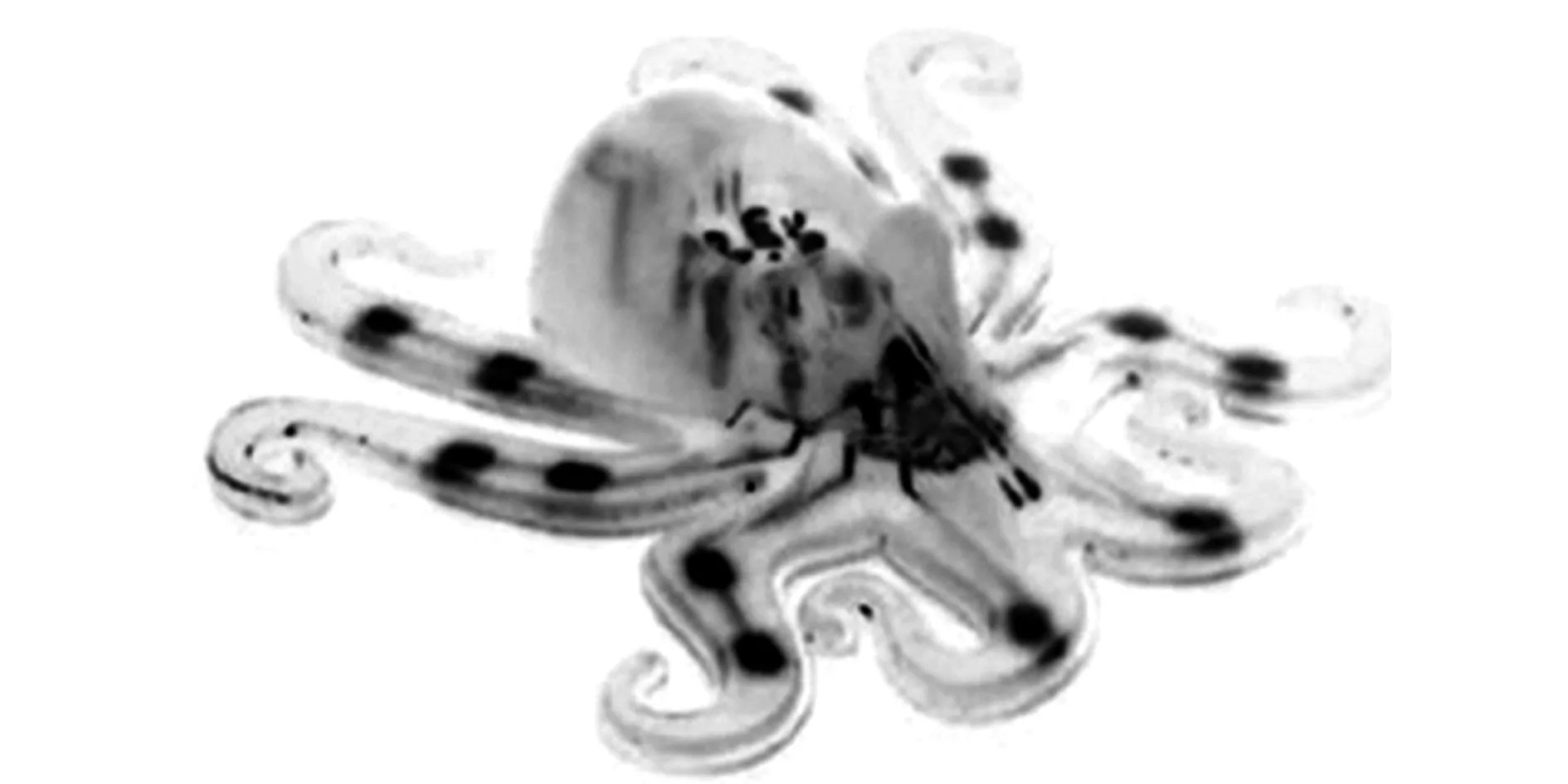
图5 Octobot的软体仿生章鱼机器人
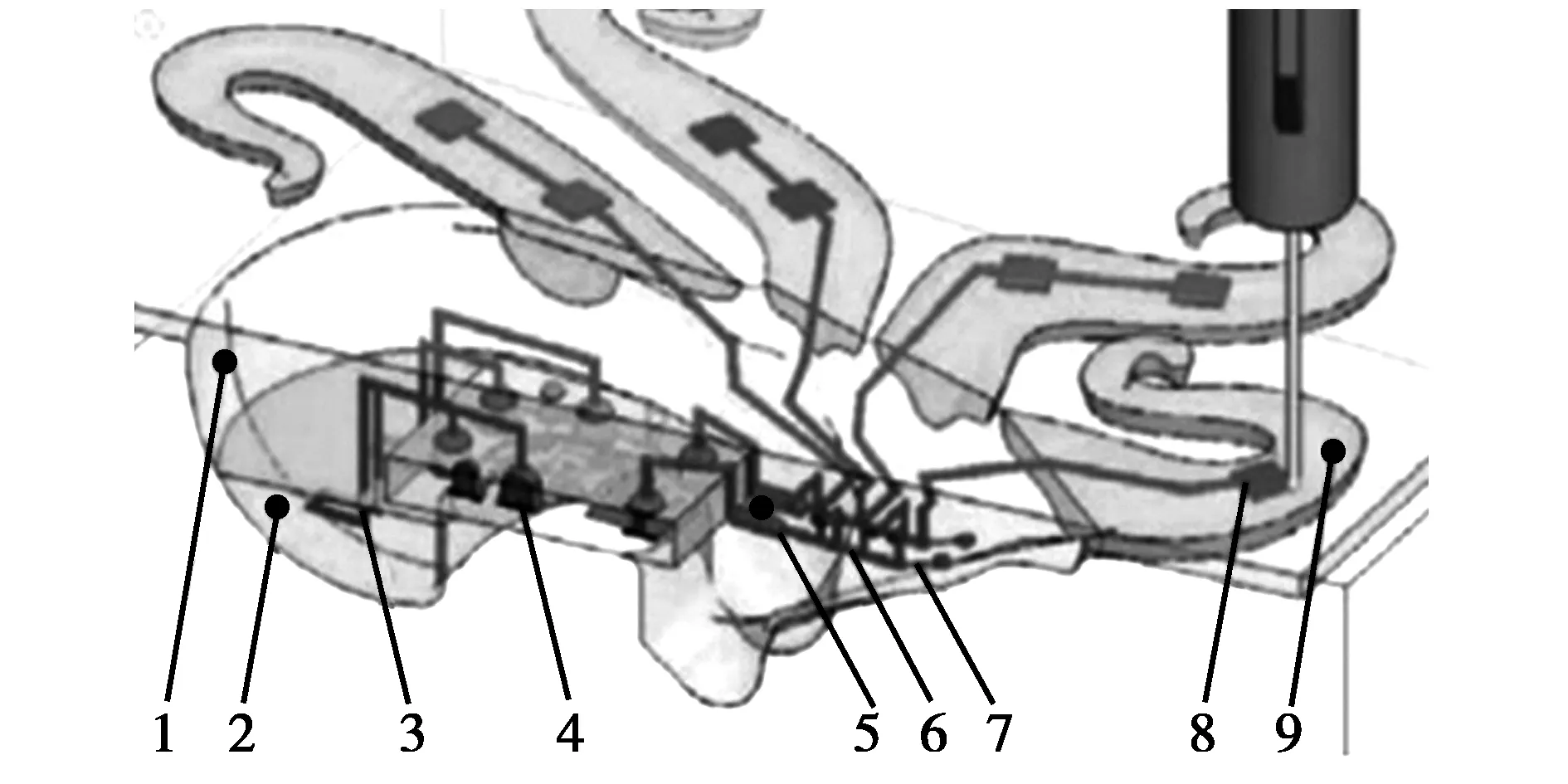
图6 章鱼内部结构
Hou等[21]研发了一种仿生飞行乌贼,通过高压CO2气瓶中喷出的气体推动机器人从水中飞到空中,但是这种飞行是一次性的,必须再次给气瓶充气才能工作。仿生乌贼如图7所示。
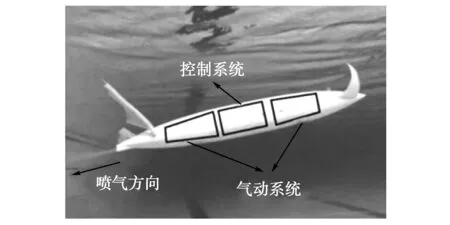
图7 仿生乌贼
1.2 功能仿生
2017年南京理工大学周雄兵[22]提出了一种仿生蠕虫软体机器人,利用蠕虫运动原理设计了纤毛触角结构,使得软体机器人向前爬行。LIN所在的课题组开发了仿毛虫机器人GoQBot[23],它是在硅胶内嵌入SMA 作为驱动,仿生虫机器人快速滚动的运动过程如图8所示。
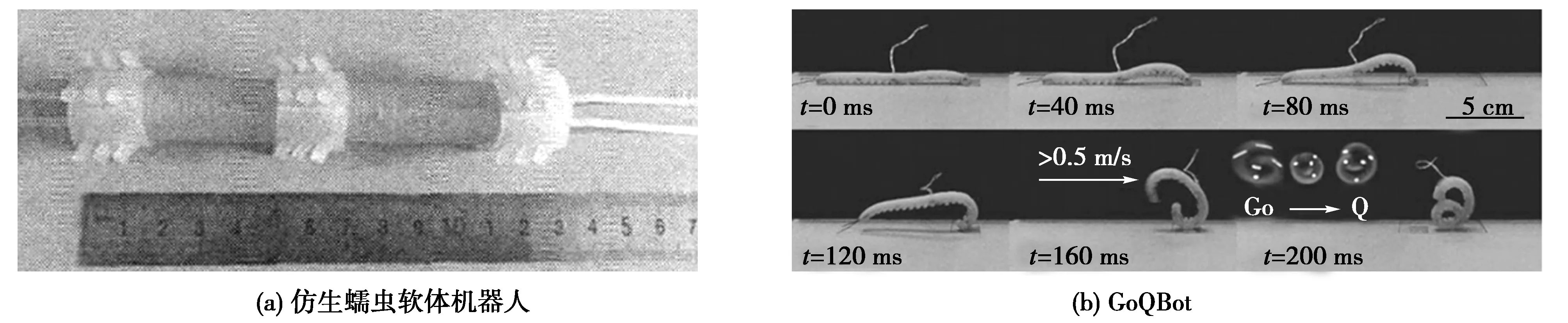
图8 仿毛虫机器人
哈佛大学Bartlett团队在2015年通过多材料 3D打印技术制作了一个依靠燃烧产生动力的机器人[24],其身体从刚性核心过渡到柔软的外部,该机器人由丁烷和氧气的燃烧提供动力,能够进行无绳跳跃。弹跳机器人如图9所示。
2016年Waynelovich等[25]设计了一种六足机器人,每条腿均由 3 个软执行器构成,通过执行器之间的组合控制实现前行、转向动作,通过增加执行器数量来提高自由度。足式爬行软体机器人如图10所示。
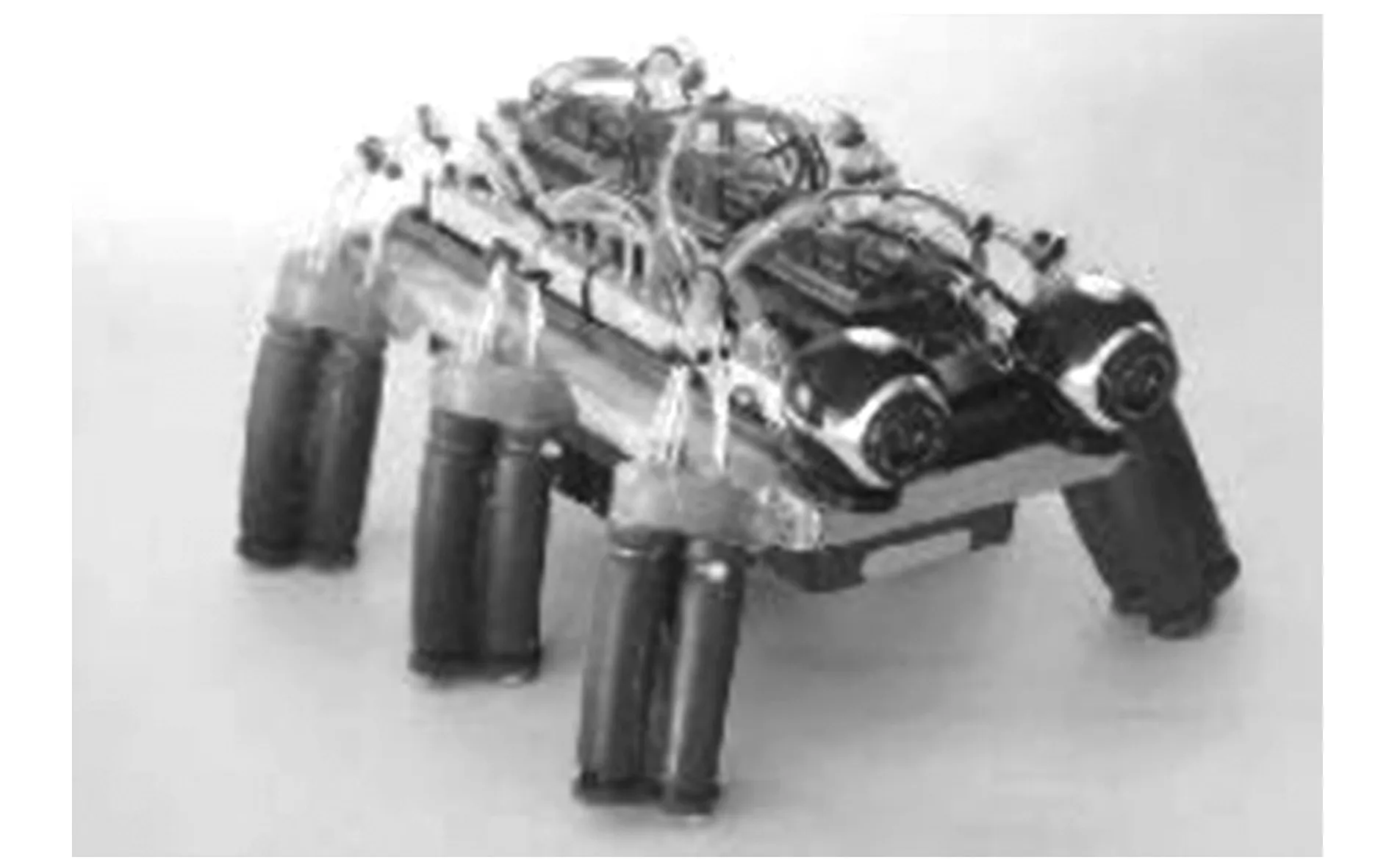
图10 足式爬行软体机器人
2 软体机器人的驱动方法
2.1 线缆驱动
受人类手指的启发,肌腱驱动欠驱动结构已广泛应用于机械手和抓手。它们通常由单个肌腱驱动的多自由度铰接体组成。传统上,夹持器使用这种驱动方法包括刚性连杆、关节和弹簧。线缆的驱动主要应用于传统的柔性机器人和欠驱动机器人。已有研究采用这种驱动方法驱动软体机器人[26-29]张缆通常通过电机驱动,驱动系统复杂、体积大,对系统小型化和集成化是非常困难的。线缆驱动机器人如图11所示。
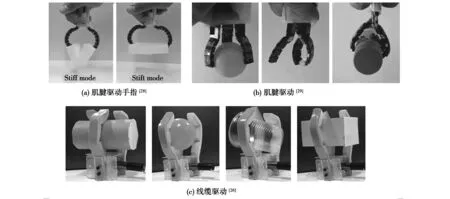
图11 线缆驱动机器人
2.2 气动驱动
气动驱动方法的优点是气源重量轻、易获得、无污染,一直被广泛的应用,特别是在软体机器人领域。传统储存气体的方法是用压缩气泵,气流通过电磁阀控制。这种驱动方法一般应用在人工肌肉和柔性驱动器,但由于储存气体的容器体积大,限制了软机器人的应用。为改善软机器人的应用前景,可以改进气动系统。
气动驱动可分为正压驱动和负压驱动;为了保持这种压力,正压驱动空气必须流入外壳;负压驱动,空气必须流出外壳。气体压力通常由与压缩机或加压供应相连的电动泵或阀门控制。在软体手单元结构设计上,气动驱动决定了软体手各单元内部的腔体结构,并有2种方法实现单元结构的多种变形,即纤维约束[30-32]和气动网络[33-37]。气动驱动软体机器人如图12所示。
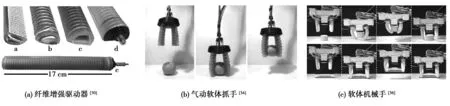
图12 气动驱动软体机器人
2.3 SMA驱动
形状记忆合金(SMA)是一种具有形状记忆效应的智能材料。它可以感受外界温度的变化,将热能转化为机械能,驱动机器人的运动。当形状记忆合金受热时,其温度会升高,达到相变所需的温度时,就会恢复初始形状。SMA具有质量轻、功率密度高的优点,但响应速度慢,需要很长时间才能恢复到初始状态。在此之前,SMA通常作为执行器用于刚性超冗余机器人和连续体机器人。SMA驱动如图13所示。
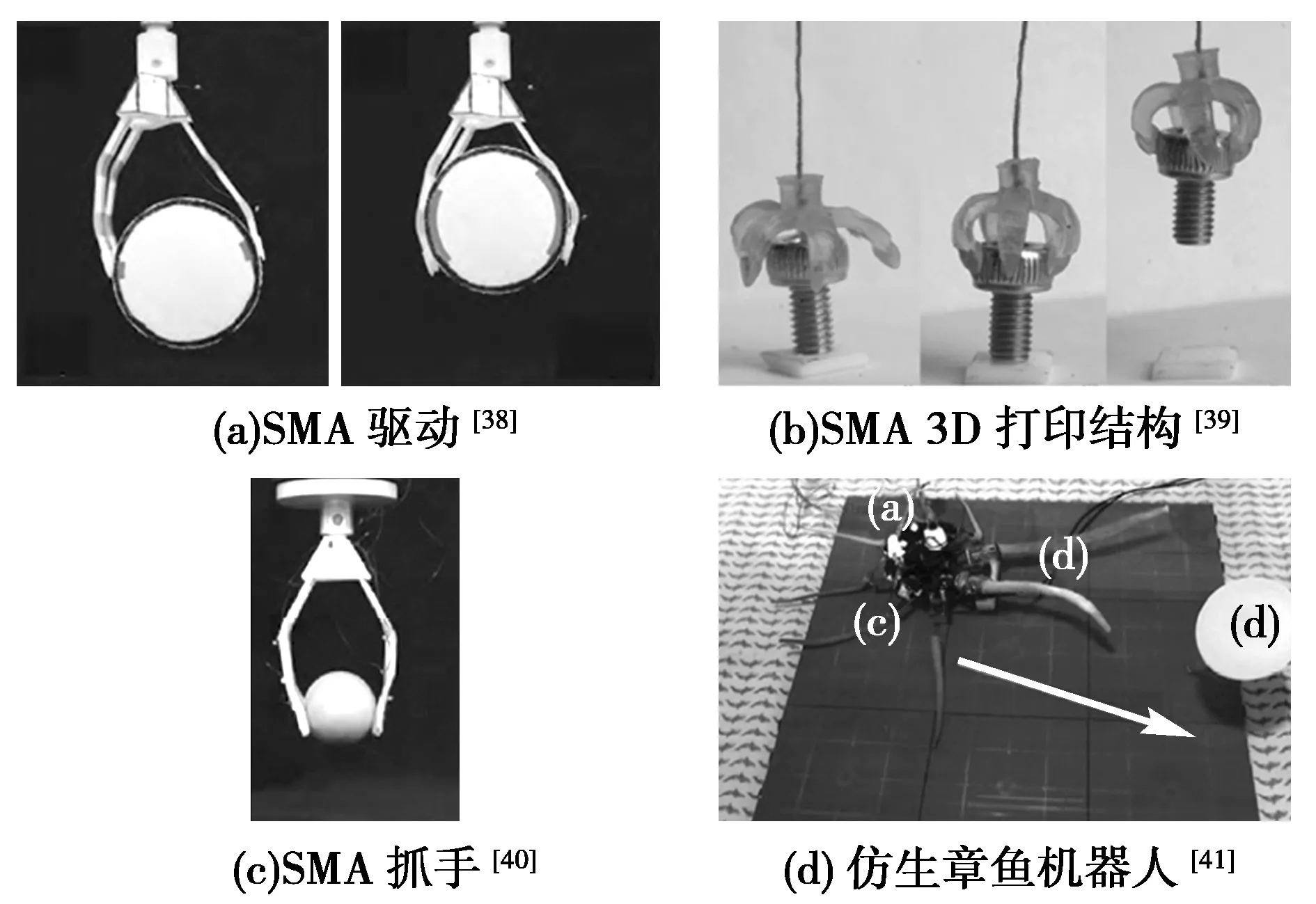
图13 SMA驱动
2.4 EAP驱动
电活性聚合物(EAP)也是一种智能软材料,在电场作用下会发生变形。电介质高弹性聚合物就是其中之一,它具有响应速度快、变形大、重量轻等优点,很多学者对其展开研究。
EAP驱动控制结构简便,非常容易集成化。然而,EAP也有应力松弛、电击穿、折叠等多种失效形式,这些都会影响EAP驱动性能。美国缅因州大学实验室研究了一种EAP驱动器[42],金属离子聚合物纳米复合材料结构(IPMC)可以用于执行机构和传感器以及能量载体。EAP驱动器如图14a所示,使用多段DEMES的抓手的示例[43]如图14b所示。
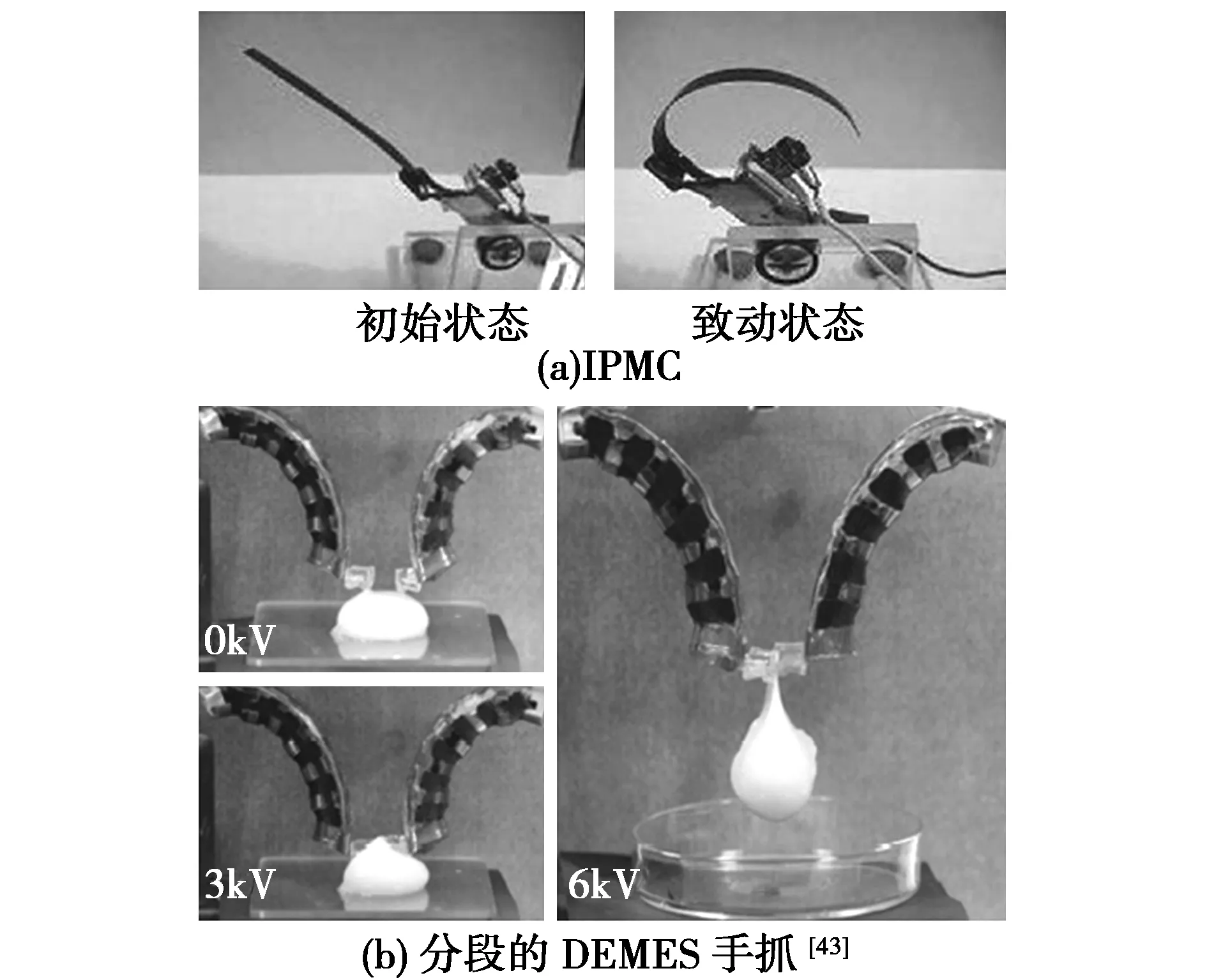
图14 EAP驱动器
2.5 化学驱动
化学驱动的原理是通过化学反应将储存在燃料内的化学能转变为机械能来驱动机器人的运动。日本早稻田大学开发了仿生尺蠖机器人[44],机器人的外观类似于弧带状结构,由水凝胶制备、Belousov-Zhabotinsky反应凝胶反复膨胀收缩,利用阶梯波结构将周期性膨胀变化转换为前进运动。仿生尺蠖机器人如图15所示。
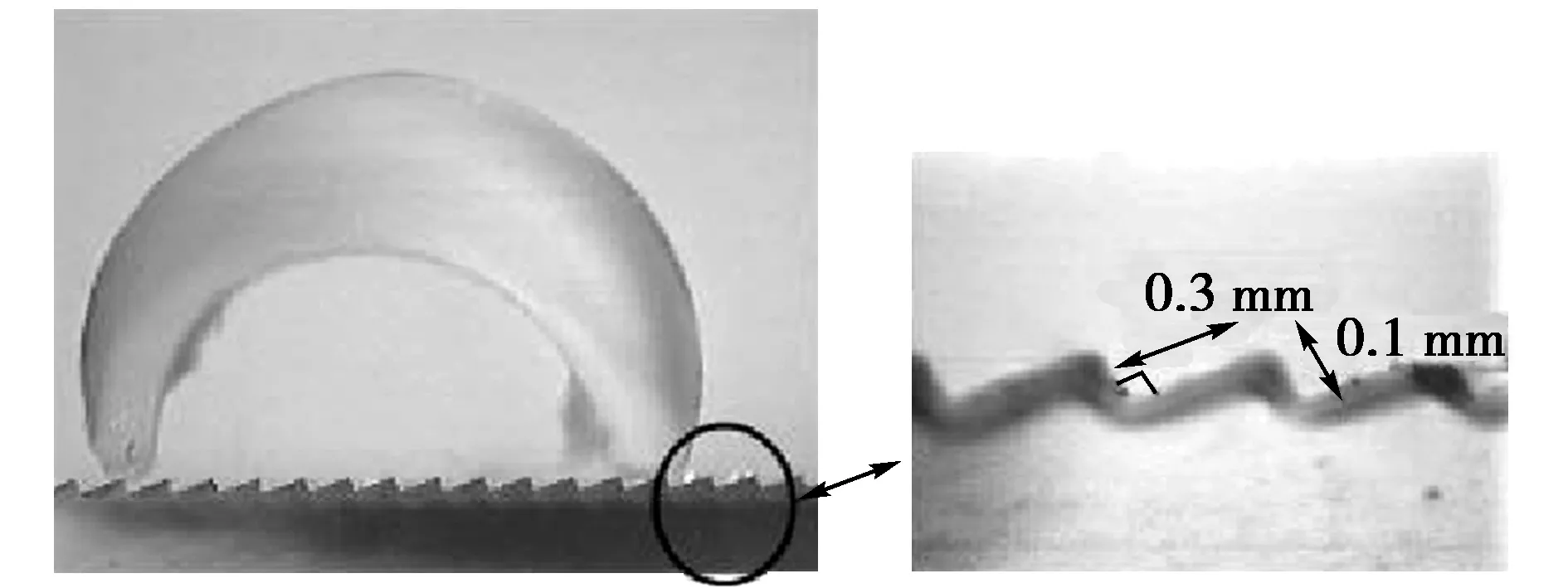
图15 仿生尺蠖机器人
3 软体机器人的建模与控制
3.1 软体机器人的建模
软体机器人通常是由软弹性材料制成的,目前还没有提出精确的模型用作分析软材料的结构特性。此外,软体机器人自由度也非常多,其运动学和动力学的建模也相对比较复杂。到目前为止,主要的研究领域集中在运动学建模领域,对动力学的研究相对较少。
研究人员对软体机器人进行运动学建模时,通常采用分段常曲率法假设[45],它把运动学分解成两个映射:一是从驱动空间到构型空间的映射,在实际使用时,针对机器人具体构型建立方程;二是从构型空间到任务空间的映射,可应用于满足恒定曲率假设的设计[46]。
逆运动学算法是一种任务空间规划算法,可以定位其末端执行器,并可以在有限的空间内操作、抓取和放置物品。而软体机器人由于自身柔性的特点,现有的控制算法难以顺利地应用到软体机器人。在规划软体机器人运动算法时,不仅要修正末端执行器的实际运动轨迹,还要考虑软体机器人自身相对于环境的位置变化[47]。
3.2 软体机器人的控制
软体机器人的控制方法可分为两种:开环控制和闭环控制。软体机器人最大的特点就是利用材料的柔软性,由于这一特点,考虑使机器人的身体和功能适应他们的环境是很重要的。这使得实现合适的传感器或获取可靠的动态模型变得困难,而控制器的设计正是基于这些模型[48]。
软体机器人不使用特定的传感器或反馈控制,即所谓的开环控制。当开环控制使用补偿输入来确定输出时,会遇到很多问题,而闭环控制可以使所设计的系统实现更准确的驱动。闭环控制通过对输入的本体感觉来反映系统的输出。利用该动态模型,可以设计考虑系统特性的高效控制器。
虽然已经报道了一些软体机器人控制的案例[49],但是控制仍然是软体机器人面临的主要挑战,因为与传统机器人相比,大多数控制方法并没有得到普遍的定义。此外,在自主软机器人控制方面可以取得更大的进展,使机器人能够在各种情况下执行高级任务、认知和与环境的交互。在线学习可以帮助在非结构化环境中配置模型或执行任务。
4 发展前景和趋势
由软材料制成的软体机器人可以表现出良好的灵活性,在一些应用中,不可避免的面临负载能力低,刚度差,低强度等问题。既要保证软体机器人的变形能力同时又要提高强度,软体机器人才有望得到更广泛的应用。
4.1 变刚度软体仿生机器人
提高软体机器人的强度可以在硅胶材料中加入弹性纤维或利用颗粒阻塞原理,但这种方法不会有非常巨大的变化。材料的刚度可以通过形状记忆合金、磁流变液或者混合材料改变。变刚度常用的方法有:层状变刚度[50]、颗粒阻塞[51-52]和静电吸附[53]等;而变刚度机器人结合了智能材料与软材料的优点,既可以保证软机器人的灵活性,又可以提高机器人的刚度。
4.2 柔性传感器集成
软体机器人的本体是非常灵活且容易变形的,需要高精度的传感器来测量,同时不影响机器人的机械响应,这需要开发一种新的可嵌入式传感器[54-58]。这些传感器需要有足够的灵活度,可以嵌入到硅胶体内,测量需要的参数,如弯曲、拉伸、应力和其他信息。但是这些传感器的弹性模量一般比较大,这会限制软体机器人本身的运动。
为了测量机器人的局部压力和应变等信息,传感器材料需要具有良好的变形能力。导电液体如eGaIn[59],可注入软体机器人的腔体,通过腔体的变形改变液体的电阻。此外,这类传感器材料非线性居多,因此很难对传感器进行标定。随着不断提高传感材料本身的特性,慢慢地升级支撑信息处理组件,软体机器人传感技术将会进入快速发展阶段。
柔性传感器和相关技术的快速发展有可能实现软体机器人的驱动传感与控制集成。机器人可以通过集成的传感器灵敏地感知外部的信息和环境,根据感知的信息控制机器人的姿态。例如,在抓取物体时软体手可以感知物体的外形轮廓,救灾中的活体信息,野外工作中的物体信息。
5 结论与展望
软体机器人是机器人技术中一个发展迅速的领域,它的出现缓解了传统机器人在人机交互、适应性等方面的不足。此外,机器人已经从执行劳动密集型、重复的、简单的任务,发展到执行更具交互性、灵巧性和高水平的任务。例如,在军事、医学、康复、辅助技术等领域,对与人互动的机器人的需求将持续增长,而软体机器人有可能满足这些需求。
未来的嵌入式人工智能软体机器人可以发展成独立导航(监控难以到达的地区,在灾区执行救援任务等)和操纵(货物的包装和组织)系统,为工业、医疗和军事等方面的发展带来帮助。软体机器人通常受到活体生物的启发,模仿它们的肌肉(驱动)、皮肤(屏障)和观察器官(传感器),这些器官能更有效、更有力地运动。与传统机器人相比,软体机器人具备补偿环境不确定性的能力,以及与人类和生物安全互动的能力。未来的软体机器人的发展方向是逐渐向刚柔结合的方向靠拢,再将软体传感器材料、嵌入式传感器的技术集成到软体传感器中,使得软体传感器具有更高的刚度和控制精度。
猜你喜欢
陕西科技大学学报(2022年5期)2022-10-13
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
纺织科学研究(2021年1期)2021-12-03
上海交通大学学报(2021年2期)2021-03-02
房地产导刊(2020年11期)2020-12-28
军事文摘(2020年24期)2020-11-29
电子制作(2019年22期)2020-01-14
当代陕西(2019年8期)2019-05-09
时代英语·高一(2019年1期)2019-03-13