漂浮状态下沉管标定方法研究
2021-12-01 00:59孙阳阳贾旭徐良
中国港湾建设 2021年11期
孙阳阳 ,贾旭 ,徐良
(1.中交一航局第二工程有限公司,山东 青岛 266071;2.中交公路规划设计院有限公司,北京 100088;3.天津市水下隧道建设与运维技术企业重点实验室,天津 300461)
0 引言
随着社会的进步和科技的发展,为解决陆上交通拥堵,又同时保证水域航运船只正常通行,沉管隧道技术越来越广泛的应用于水上交通工程。沉管隧道作为重要的跨水陆两域交通基础设施形式,已经在港珠澳大桥海底隧道、深中通道及大连湾海底隧道等工程中取得应用。目前沉管安装测控定位方法主要有测量塔全站仪定位法[1-2]、测量塔GPS 定位法[3]、机械拉线定位法、超短基线声学定位法、水下摄影法、贯通测量等方法。超短基线声学定位法、机械拉线定位法、水下摄影法等主要应用于管节首端的相对定位,而测量塔相关的方法则可以实现沉管安装首尾端绝对定位。目前国内主要沉管隧道,如:港珠澳大桥海底隧道采用测量塔和超短基线声学定位法相结合的方式进行沉管的安装定位,深中通道和大连湾海底隧道采用双测量塔的方式进行沉管的安装定位。
采用测量塔法进行沉管安装,由于沉管会全部沉入水面以下,只能通过高于水面一定高度的测量塔顶的GNSS 定位设备来进行沉管定位安装指挥。这就需要事先标定出测量塔顶的GNSS 设备同管节定位特征点之间的相对位置关系,但受沉管安装工艺影响,管节横移至舾装区后才进行测量塔的安装,此时管节处于漂浮状态,会随着波浪晃动,给准确推算二者的相对位置关系带来困难。本文对5 种漂浮状态下测量塔的标定方式进行介绍,并对其优劣性进行分析。
1 管节漂浮标定方法介绍
1.1 GNSS 同步标定法
GNSS 同步标定法是利用GNSSRTK 同步观测,利用坐标转换[4]的一种浮态标定方法。管节预制完成后,一次舾装区陆域固定不变的情况下,在管节顶面布设4 个特征点G1—G4,并标定出特征点同管节的相对位置关系。然后将管节横移至二次舾装区,在水域漂浮状态下完成测量塔安装,并在测量塔顶布设2 个特征点G5 和G6。在特征点G1—G6 处分别安置GNSS 定位设备,6 台GNSS 设备利用RTK 测量模式同步采集数据。选取多组同步数据,利用管顶G1—G4 同管节相对位置关系,推算测量塔顶特征点G5 和G6 同管节的相对位置关系。示意图见图1。

图1 GNSS 同步标定法示意图Fig.1 Schematic diagram of GNSS synchronization calibration method
1.2 全站仪浮态标定法
全站仪浮态标定法是一种直接标定成果的检核方法[4]。棱镜特征点布置同GNSS 同步标定法类似,共布置6 个特征点。选择天气良好的时段,利用安装船压载水系统,通过安装在管内的倾斜仪数据将管节调平,在特征点L1—L6 处安置棱镜,在管节顶面选取合适位置架设全站仪,将全站仪精平后关掉自动补偿功能,使全站仪竖轴与管节坐标系XOY 平面垂直。利用特征点L1—L4同管节相对位置的管节坐标,采用后方交会测量方式,依次观测特征点L5 和L6 处棱镜。此方法可以直接测出L5 和L6 同管节相对位置的管节坐标。示意图见图2。
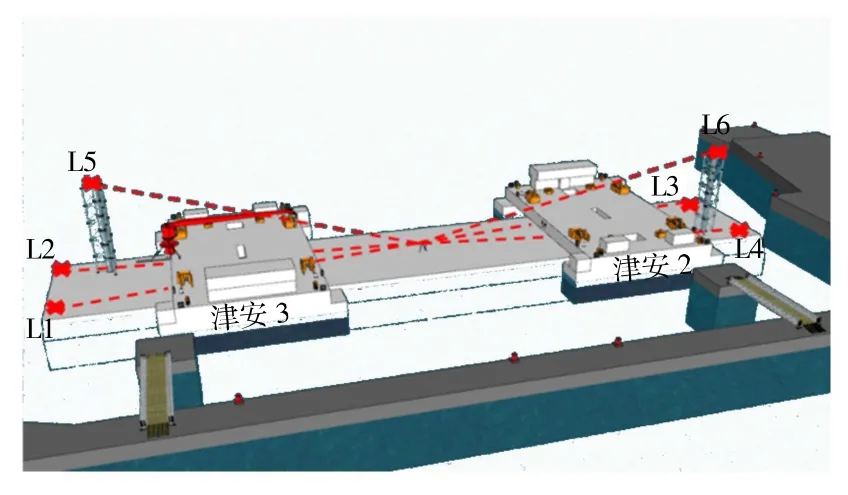
图2 全站仪浮态标定法示意图Fig.2 Schematic diagram of the floating calibration method of the total station
1.3 全站仪同步标定法
全站仪同步标定法是利用岸上架设全站仪同步标定测量塔的一种浮态标定方法。特征点的布置同全站仪浮态标定法一致。在二次舾装区岸边选取6 个测站点架设全站仪,同步观测特征点L1—L6 上的棱镜。6 台仪器采集数据通过数传电台实时同步传至计算机,测量出6 个特征点的相对位置关系。利用管节顶面特征点L1—L4 同管节相对位置的管节坐标,通过坐标转换,推算测量塔顶特征点L5 和L6 同管节相对位置关系。
1.4 空间距离交会测量法
空间距离交会测量法是利用测边交会反求坐标的一种推算方法。在干坞内布设管节中间的特征点S1—S3,测量塔安装完成后,利用全站仪测量S1—S3 同特征点L5、L6 之间的距离关系。根据S1—S3 的管节坐标,结合S1—S3 同特征点L5和L6 的空间距离,构建空间距离方程[5-6],从而确定测量塔顶特征点L5 和L6 同管节的相对位置关系。
1.5 双目视觉立体成像技术标定法
双目视觉立体成像技术标定法是通过2 台照相机在岸上对水中漂浮的管节进行测量,获得管节及测量塔顶特征点在像空间坐标系下的三维坐标,进而解算特征点间的空间关系[7-8]。由于管节较长,可分两次进行拍摄,得到特征点的相对几何关系。根据管节顶面特征点在管节坐标系下的坐标,解算测量塔顶2 个特征点的管节坐标,从而确定测量塔顶2 个特征点同管节的相对位置关系。
2 标定方法对比
5 种沉管浮态标定方法各有优缺点,对比结果见表1。

表1 漂浮状态下沉管浮态标定方法对比Table 1 Comparison of floating calibration methods for immersed tube in floating state
5 种漂浮状态下沉管标定方法在不同水域测量环境下可达到的精度详见表2。

表2 漂浮状态下沉管标定方法平面精度对比Table 2 Plane accuracy comparison of calibration methods for immersed tube in floating state cm
全站仪同步标定法对测量操作同步性要求较高,但是多组数据采集结果平均值精度可以达到1 cm,满足沉管标定精度要求,由于该方法人员及仪器组织较为困难,目前该方法仅应用于沉管标定复核检测。空间距离交会测量法对测量距离精度要求较高,需进行点位网形选取及点的严格固定,目前进行的空间距离交会测量法进行漂浮状态下管节标定,最佳结果2 cm 之内,最差结果为5 cm,测量方法仍需进一步优化。双目视觉立体成像技术标定法进行沉管漂浮标定成本和操作难度较大,目前还在科研阶段。
考虑测量精度并同时考虑人员仪器组织的便利性,目前主要采用的两种方法为GNSS 同步标定法和全站仪浮态标定法。全站仪浮态标定法对外界环境要求较高,需要风平浪静、沉管调平的情况下进行测量,但其测量方式简单、方便,直接测量结果即为管节坐标系下坐标,被广为使用。港珠澳大桥海底隧道[9-10]、深中通道和大连湾海底隧道工程均采用全站仪浮态标定法、GNSS 同步标定法等进行沉管的标定及检核。
3 工程应用
大连湾海底隧道是我国北方首条海底沉管隧道,也是国家全面振兴东北老工业基地的重大交通基础设施项目。大连湾地处渤海湾,海面风浪较小,同时管节浮态标定区域位于舾装区内,周围有防波堤阻隔,标定外界环境较好。大连湾位于北纬 38°43′—40°12′,东经 120°58′—123°31′之间,电离层对GNSSRTK 卫星信号接收影响较小,故GNSSRTK 测量精度较高。因此,大连湾海底隧道建设工程沉管测量塔浮态标定采用GNSS 同步标定法和全站仪浮态标定法相结合的方式。
GNSSRTK 同步采集时间超过7 h 共计26 575组数据,通过测控系统推算,沉管首尾端测量塔测量结果平面精度可以达到1 cm 之内,测量塔GNSS 同步标定法偏差图见图3。
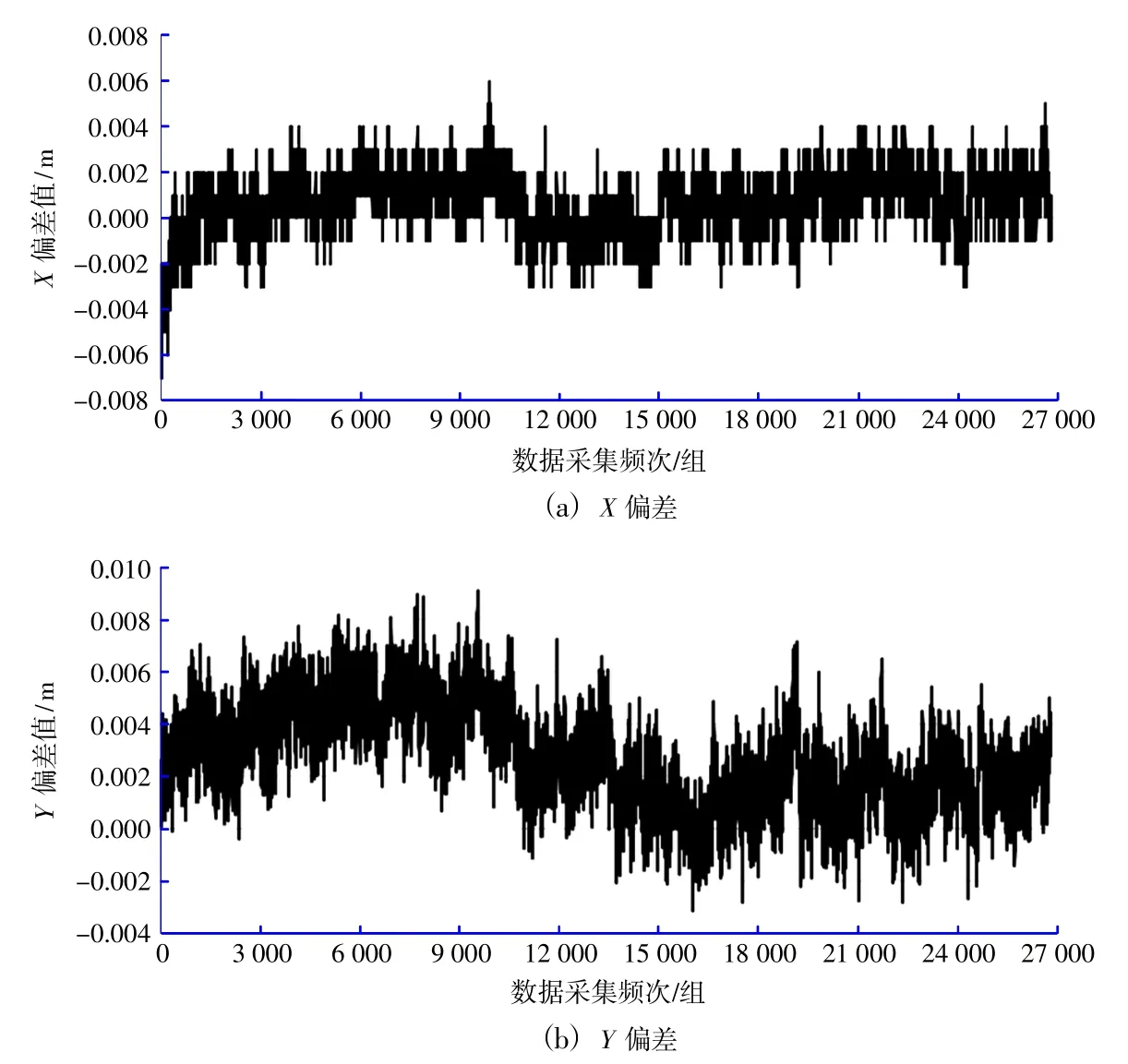
图3 沉管测量塔GNSS 同步标定法偏差图Fig.3 Deviation diagram of GNSS synchronous calibration method for immersed tube measuring tower
全站仪浮态标定法对沉管首尾端测量塔2 组棱镜在不同时间段下采集8 次,共计16 组数据。通过16 组数据散点图发现,随着管节在海面上浮动,整体测量点位呈居中分散式分布。然后对这16 组数据进行分析,通过与平均值互差可以发现,测量结果平面精度可以达到1 cm 之内,点位分散图见图4(其中S1 为沉管首端测量塔顶棱镜,W1 为沉管尾端测量塔顶棱镜)。
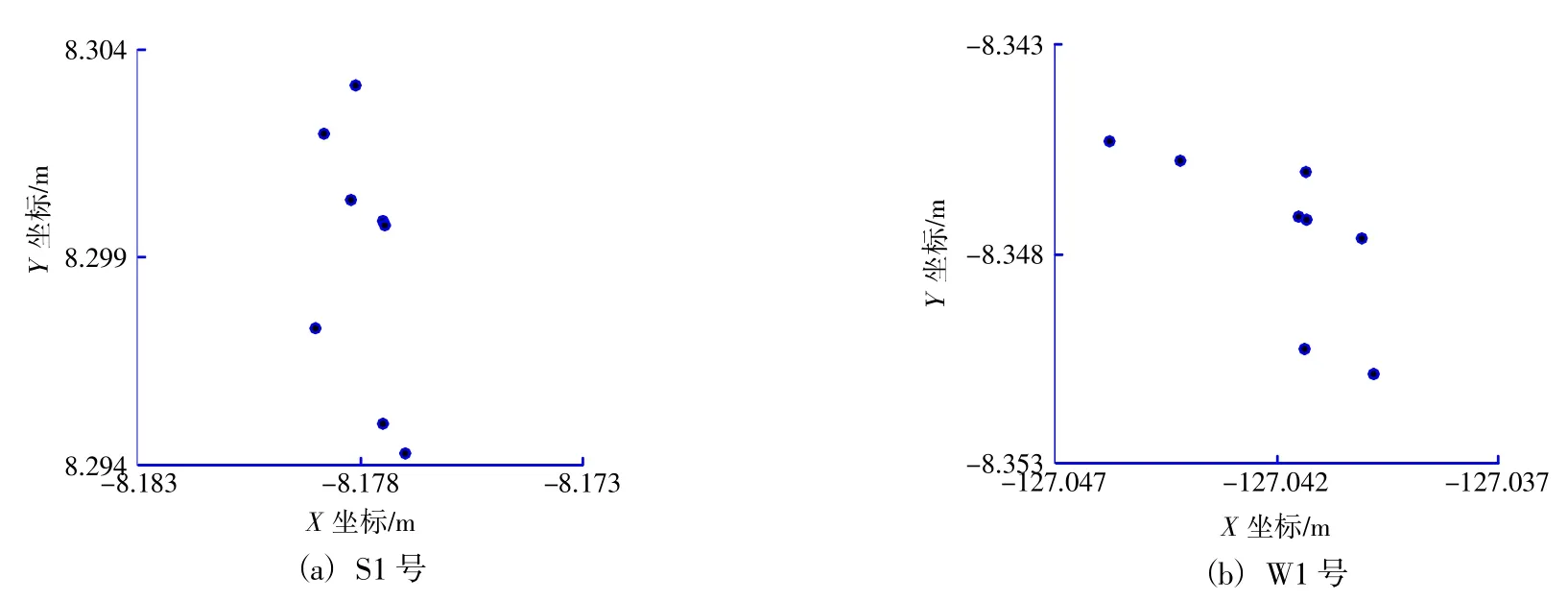
图4 沉管首尾端测量塔2 组棱镜全站仪浮态标定法采集点位分布散点图Fig.4 Scatter diagram of point distribution collected by floating calibration method of 2 sets of prism total station for measuring tower at the head and tail end of immersed tube
4 结语
随着沉管法在大型海底隧道工程中的广泛应用,漂浮状态下沉管高精度标定对沉管的精确对接起着至关重要的作用。本文对5 种常见的浮态标定方法进行了研究,并对大连湾海底隧道建设工程沉管测量塔浮态标定所采用GNSS 同步标定法和全站仪浮态标定法进行阐述分析,可为其他类似的海洋工程施工提供参考。同时,随着社会的发展,管节浇筑、沉管安装可能均在外海进行,管节的标定条件会更加恶劣,因此,不考虑管节漂浮影响的动态管节标定方法仍需要进一步研究。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
城市建筑空间(2021年12期)2021-02-12
水道港口(2021年6期)2021-01-25
城市道桥与防洪(2019年5期)2019-06-26
红领巾·萌芽(2019年3期)2019-04-18
红领巾·萌芽(2019年2期)2019-04-18
科学中国人(2017年24期)2017-01-28
中学数学杂志(2016年1期)2016-02-16
中国港湾建设(2015年11期)2015-01-05
城市道桥与防洪(2014年6期)2014-02-27