
高空作业车工作平台速度处理对策研究 Study on Speed Treatment Countermeasures of Working Platform of Aerial Work Vehicle
2021-11-30 00:42秦基磊QINJi-lei史蔚SHIWei
内燃机与配件 2021年22期
关键词:对策研究
秦基磊 QIN Ji-lei 史蔚 SHI Wei
摘要:高空作业车是一种广泛应用于先进的船舶、建筑、市政工程建设、消防以及港口等领域内的机电设备,近十几年来市场对于这种设备的需求量也逐渐增加。本文采取了模块化设计的主题思想,将速度进行分解,主要分为行程末段、圆周率、匀速过程和减速过程四个模块,在每个模块中采取相对应的速度计算方法,通过模拟计算实现了较为精确的结果。希望本文的研究,能够给高空作业工作平台的速度处理带来一些指导。
Abstract: Aerial work vehicle is a kind of electromechanical equipment widely used in advanced ships, buildings, municipal engineering construction, fire protection and ports. In recent ten years, the market demand for this kind of equipment has gradually increased. This paper adopts the theme of modular design and decomposes the speed, which is mainly divided into four modules: end of stroke, circumferential rate, constant speed process and deceleration process, The corresponding speed calculation method is adopted in each module, and more accurate results are achieved through simulation calculation. It is hoped that the research of this paper can bring some guidance to the speed processing of aerial work platform.
关键词:高空作业车;速度处理;对策研究
Key words: aerial vehicle;speed processing;countermeasure research
中图分类号:TU6 文獻标识码:A 文章编号:1674-957X(2021)22-0077-02
0 引言
高空作业车的应用领域十分广泛,是现在社会发展以及工业生产中比较常见的设备。针对目前国内的高空作业车控制系统而言,最主要的是以机械液压作为动力部件,其运动速度以及精确度完全取决于操作员的经验以及技能熟练程度,这种情况主要是由于高空作业车的智能控制系统仍然被国外的少数企业所垄断。高空作业车智能控制系统可以在作业平台运行的过程中尽可能的减少人员操作的介入,实现较为平缓运行在可靠的作业范围,并且高空作业人员的安全性以及工作过程中的舒适性能够获得较大程度的提升。这便是研究高空作业车控制系统的主要目的。
1 速度处理方法研究
高空作业车与高空作业平台从字面来进行理解,高空作业车是由汽车加装或者改装,拥有汽车底盘,在移动的时候拥有方便快捷。而高空作业平台就是独立的高空作业设备,是一个平台而非是汽车。二者之间需要共同进行血条工作来完成施工作业。如果想要提升在高空作业中平台运行的平稳性和安全性,就需要对于速度进行精确控制,这样能够避免速度产生突变导致工作人员由于惯性产生的危险以及不舒适。为了研究速度处理方法,本文采取将速度进行分解的方式,将速度分解成:形成末端速度处理、圆周率速度处理、匀速运行过程速度处理、加减速速度处理的四个模块,将工作平台的不同状态进行逐个研究,模块化处理流程如下:
1.1 行程末端的速度处理
对于高空作业车工作臂在运行过程中的要求,应该在工作臂进行起伏、伸缩和回转过程中设定一定的约束工作区间,约束位置便成为形成末端。为了让工作平台尽可能的平稳运行,在接近形成末端的时候,智能控制系统应该提前进行减速处理,增加整个平台和机械臂系统在运行过程中因为触及约束边界发生较为激烈的减速,对工作人员的安全性和工作舒适度产生影响。
形成末端速度控制的机制,在于首先划定一个机械臂最大移动区间,即约束的工作区间,其次,在工作区间之内划定正常工作范围,超出正常工作范围的就应该进行减速,保证机械臂和工作平台接近约束区间边界时能处在较低速度,这样更容易对其进行控制,减小惯性造成的影响。
这种控制方法在于工作区域以及约束区间的划定,这二者均是在三维尺度上进行划定的,应该将形成末端速度控制进一步分解成工作臂进行起伏运动、伸缩运动以及回转运动,在起伏运动过程中,应该将起伏运动最大角度和最小角度进行划定,同时划定正常工作区间的角度范围,标记成θmin,θmax,θa,θb。同时在工作臂进行伸缩运动的过程中,应该同样将伸缩运动的范围进行划定,设定伸缩区间的最大最小值,和正常伸缩区间的范围,lmin,lmax,la,lb。其中工作臂进行回转运动的过程中,计算方法于在进行伸缩运动和起伏运动中的计算方法一致。
1.2 圆周率处理
在机械臂和工作平台运行的过程中,其线速度不仅与操作杆产生的输入值有关,还和工作臂当前的工作状态,即伸长量以及工作半径相关,为了能让工作平台尽可能以平稳的速度运行,将操作杆产生的信号进行平滑处理是十分重要的。
1.3 匀速过程速度处理
在系统获得了有效的速度输入值之后,可以通过判断输入值确定当前系统的运行状态,再利用PD算法控制整个系统的速度。PD控制方法是一种比较传统的控制算法,在进行工程计算的过程中应用比较广泛,这种算法具有结构简单、稳定性优良、工作可靠并且调整起来比较简便的特点,在应用过程中受到广泛好评。PD控制系统由比例单元、积分单元和微分单元构成[1]。当控制对象的精确姿态或者数据不能够进行精确的测定时,利用这种算法可以实现在操作现场进行调试的目的,并且可以在一定程度上利用经验参数作为算法的数据依赖。
1.4 加减速过程速度处理
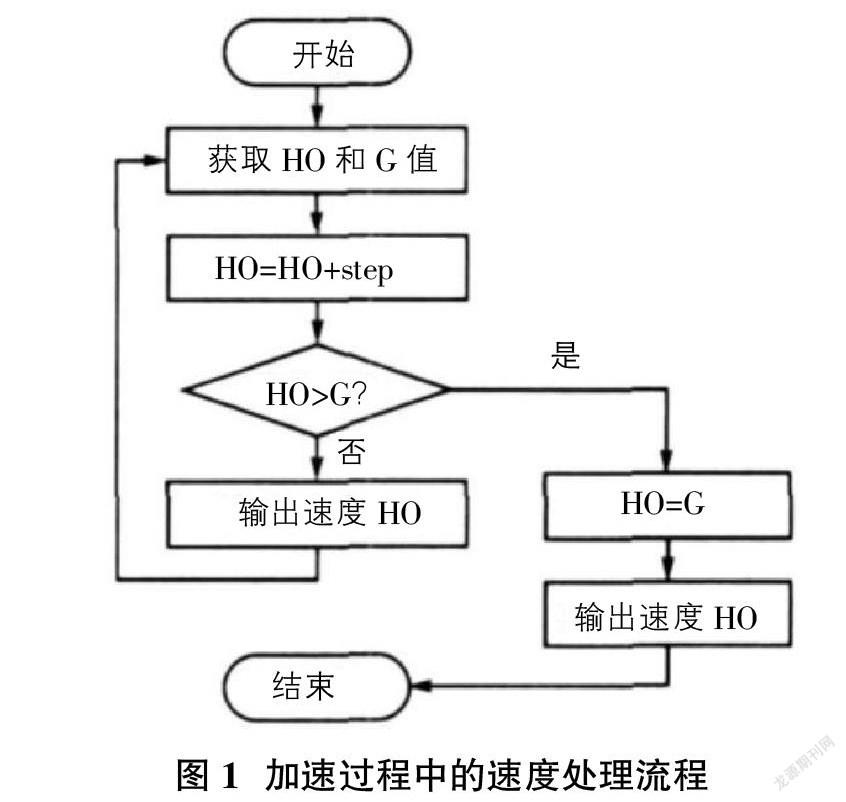
在高空作业车进行工作的过程中难免会遇到需要进行加速以及减速的场景,前面也提到影响工作车工作平台中工作人员安全性以及舒适度的重要因素就是是否能够妥善的处理加速以及减速过程。加减速的处理过程也相对比较复杂,其流程图如图1所示。
当工作臂和初始速度HO想要变化到目标速度G的过程中,应该采取阶梯状变化处理,每次输出的增加值可以设定为step变量,达到目标速度G位为止。除此之外,step的数值应该根据循环阶梯的数值进行设定,当循环阶梯时间比较长的情况下,step应该选取最大值来节约变化时间。
2 计算结果的分析
本次进行研究的是某型高空作业车侧方区域上对设计速度的处理方法进行了测验,通过对试验数据的结果进行分析发现:当高空作业车的工作半径处在3-6m的情况下,平台在经过圆周率处理之后进行匀速的运动,采用的是PD控制算法,从图中可以得知:PD控制的效果非常好,没有超调并且无静态误差,可以在一定程度上说明计算结果的准确性。当作业半径在6-8m的区间内,平台进行了加速运动,采取的加速方式是一种线性缓冲法,这种方法的加速可以尽可能的减少高空平台的颠簸,防止操作人员发生危险,在这个过程中平台可以缓慢加速到目标的速度区间[2]。当作业半径范围处在9.5-11.5m时,平台进行减速运动,同样采取了线性缓冲的方法,平台速度缓慢减速到期望速度,同样这种减速方式也可以尽可能地避免操作人员因为平台减速引起的颠簸和危险现象。
通过对于计算模拟结果分析,能够看出,在整个测试过程中,工作平台相对稳定,能够保证工作人员在平台上处在一个比较平稳的状态,不会感受到车辆发生明显的抖动,舒适性得到了明显的提升,同时通过对实验结果的进一步研究发现,本次设计的速度处理方法可以有效地减轻由于速度突变产生的操作车颠簸现象,能够有效的提升高空作业车在工作过程中人员的舒适程度。
3 高空作业车工作平台速度处理对策
3.1 加强智能化系统在速度控制中的应用
前面提到了一种控制高空作业车的方法,能够有效的提升高空作业车在运行过程中,工作人员的舒适性以及安全性,为了强化我国所使用的这方面设备性能,将智能的控制系统进行广泛的推广具有非常大的现实意义[3]。具体的过程实施,应该促进相关的设备生产厂商与高校和研究所等研发单位增强合作,将各种控制系统应用于设备中,同时可以借鉴国外先进产品的优点,强化设备研发等环节,将高空作业车设备的速度控制等方面進行进一步的提升。
3.2 搜集相关设备运行数据
不同的设备由于工作状态以及生产的原因会产生不同的振动以及速度控制特性,这些均会细微的反映在设备操作上,为了更好的提升智能控制系统的性能,广泛的搜集设备工作中的各项性能参数,分析产生这些差别的原因,并且将这些因素考虑到控制系统中的算法中,通过不断地实践和调整,在理论上可以开发出自适应智能调节系统,将这种系统广泛的应用在高空作业车的控制上,可以有效的减少设备调试以及维护时间和成本,是一个值得深入研究的课题,但是就国内外的现状来看,这种自适应的控制系统在高空作业车当中的应用应该还有待加强,加入这个系统的方案不在本文讨论范围之内,但是可以预见的这将是一个处理高空作业车工作平台速度的有效方法。
3.3 加强高空作业车的工作规范
想要实现高空作业车的工作规范与速度控制的精准,就必须要设定一套十分具有可行性的标准化工作规范,这是标准化作业的前提。工作规范的设定并不是一个普通的参考文件而已,恰恰相反,工作规范是整个高空作业车平台运行和进行速度控制的工作标准和重要指导。因此,要加强对高空作业车平台的处理规范建设与制定,并采取有效的监管措施对其进行执行,从而有效的保障高空作业车的安全以及平台的速度控制,实现更好的作业与服务水平[4]。
4 结束语
高空作业车平台是进行高空作业控制的重要平台,其控制效果的好坏关乎高空作业的安全以及作业的效率。因此,对高空作业车平台进行合理的控制以及有效的管理是实现高空作业质量的关键一步。在整个速度控制过程中,不仅要严格把控监管流程,积极提升有关监管人员的素质,还要多方位的运用智能化仿真模拟系统来对其速度控制的效果以及精确度提供保障,进而实现数字化的控制与智能化的平台运行。
参考文献:
[1]吴光荣,江传尚,全剑敏,等.高空作业车工作平台速度处理方法研究[J].机电工程,2010(01):79-81.
[2]罗天洪,陈巍巍.高空作业车折叠伸缩混合式工作臂稳定性分析[J].机械设计与制造,2009(009):118-119.
[3]蒋运臣.一种电力高空作业车的稳固装置及其安装方法: CN111362208A[P].2020.
猜你喜欢
文教资料(2016年19期)2016-11-07
人间(2016年26期)2016-11-03
时代金融(2016年23期)2016-10-31
商业会计(2016年15期)2016-10-21
成才之路(2016年26期)2016-10-08
- 内燃机与配件的其它文章
- 纯电动汽车坡道起步防溜系统及控制策略的研究 Research on the Anti-Slip System and Anti-Slip Control Strategy of Pure Elect
- 气缸套网格状激光淬火机床设计 Design of Grid Laser Quenching Machine Tool for Cylinder Liner
- Arduino在汽车CAN通讯中的应用研究 Research on the Application of Arduino in Automobile CAN Communication
- 内燃机零部件结构设计及应用研究 Structural Design and Application Study of Internal Combustion Engine Components
- 汽车智能熄灯保护系统的开发 Development of Intelligent Lights-off Protection System for Automobile
- 基于Workbench的炭罐电磁阀流量特性分析与优化 Analysis and Optimization of Canister Purge Valve Flow Characteristics Based on Workbench