无人机倾斜摄影技术在水利工程中的应用
2021-11-30 08:16:30苏瑞东
山西水利 2021年7期
苏瑞东
(太原理工大学,山西 太原 030024)
倾斜摄影技术是指通过无人机上搭载与地面成一定角度的相机获取影像,其主要目的是获取地物多个方位(尤其是侧面)的信息,并可供用户多角度三维浏览和实时量测。
随着“数字水利”及对建筑物三维信息的快速需求,通过无人机对水利工程设施进行多角度拍摄,利用其位置及纹理信息进行三维建模,反映其各处实际情况,管理者可通过其多角度三维信息作出决策。本文在无人机航测水库的基础上,总结出一套适用于水利工程的无人机倾斜摄影技术。
1 像控点布设与测量
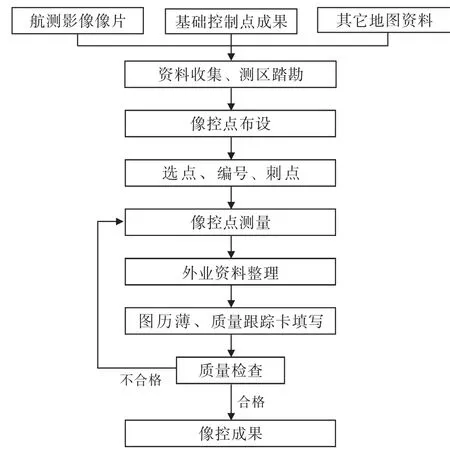
图1 像控点测量流程图
为了提高成图精度,倾斜摄影测量需进行像控点控制加密。因此,像控点布设与测量时要保证其选取的质量及准确程度。倾斜摄影测量的像控点,需均匀布设在测区范围内,且不同的高程应全覆盖。布设密度:(1)无差分GPS,均匀范围分布3~5点/km2。(2)差分GPS:1∶2000比例尺,1点/km2;1∶1000比例尺,2个/km2;1∶500比例尺,3个/km2。
1.1 基本要求
(1)采用常规光束法区域网布点方案,测控网的划分,按测区地形特点、航区的实际划分、图幅分布等情况全面进行考虑,以能满足空中三角测量精度要求为原则,根据具体情况选择最优实施方案。
(2)划分区域网时,应尽量避免航线结合处,落在区域网的首末航线上。
(3)区域网间的像控点,应布设在区域网间的航线重叠处,尽可能公用。如不能公用,则需按要求分别布点。
(4)像控点全采用平高点进行布设,区域网内无人机航向相邻控制点间基线数估算公式如下[1]:

式中:ms——连接点(空三加密点)的图上平面中误差,mm;
k——像片放大成图的倍数;
mq——视差量测的单位权中误差,mm;
n——航线方向相邻平高控制点的间隔基线数。
1.2 测量流程
据库区管理人员提供的水利枢纽地图,结合手机百度地图,并在库区管理人员的简单介绍下,初步了解水库的上游、枢纽、下游及周边道路的分布情况。通过像控点的布设原则(像控点的位置,原则上应选择可到达的硬化水平路面。将像控点尽可能均匀地分布在上游、库区水面周围与下游的航测区域内。小型水库像控点数量,原则上不少于3个,中型水库原则上不少于15个,大型水库原则上不少于20个,可根据实际地形与交通情况适当增减像控点数量。)初步规划像控点的分布位置,在手机百度地图上标记出来并截图和编号,具体流程及要点如下。
1.2.1 选点
像控点应设在地面起伏较小,相对平整的地方,如选取固定地物,要选取的地物近期不能发生变化。点位处地物与周围地物色差明显,形状应该规则,点位处最好是较大锐角角点,以直角点为佳,这样可保证量测准确且后期易于内业刺点。像控点也可自制,如使用白色涂料或编织袋,制作成醒目的标志(长、宽约2m)。确保标志上方无遮挡物及所制作标记在短期内(10d内)不易被破坏。
1.2.2 编号
像控点号应统一编制,不得重复。像控点的点号,建议由一位英文字母与六位阿拉伯数字组成。其中,字母代表控制点编号首代码,平高点编号首代码为“P”,检查点首代码为“J”;前两位数字为分区编号,后四位数字为像控点流水号,如P010010为第1测区的第10个平高点。
1.2.3 施测
根据测区已有基础资料及地形情况,可选择GPSRTK、GPS静态、GPS快速静态等测量方法,其中GPSRTK包括单基准站RTK、网络RTK,也可使用后处理动态(PPK)模式进行测量,作业过程中根据实地情况选择适合该测区的测量方法。
量测时,首先确定该测区的像控点使用的坐标系统(CGCS2000坐标系)和投影坐标所在的中央子午线分带,周围不能有大型金属物体及大功率无线电发射源[2][3]。每个放点位置,必须留存3张(1张近照、2张远照)相对位置清楚、易寻找的照片,拍摄时像控点位置上应架设仪器脚架或其它明显能与周围环境区别开的标志,已备内业刺点时查询精确位置。
2 航空倾斜摄影
倾斜摄影所用采集设备,包括五镜头,四镜头,三镜头,双镜头,单镜头。其中,双镜头的拍摄方式为前后摆动式;单镜头的需要进行5次航拍,包括下视、前视、后视、左视、右视的图像,相当于五镜头一次飞行的拍摄的图像。对于大面积数据采集可采用电动固定翼无人机搭载五镜头进行拍摄,对于细节部分可采用大疆“悟”Inspire2进行补拍,其搭载禅思X7云台相机,且相机必须经过校验才可用于无人机航测。

图2 倾斜航空摄影作业流程
2.1 航线规划及数据采集
根据测量精度进行重叠度设置,如精度要求在1∶2000,可把航向重叠度设置为70,旁向重叠度为70以上,飞行高度控制在200~250m之间,也可据测区地形,在保证安全情况下适当降低或升高飞行高度,飞行速度可据实地风速进行调整,最好控制在15~20m/s。航线设置主要分为“之”飞行和“骨架式”飞行两种方式,对测区范围内进行倾斜航空摄影数据采集,获取影像信息、POS数据、地面GPS基站等各类航测的原始数据[4]。详见图3。
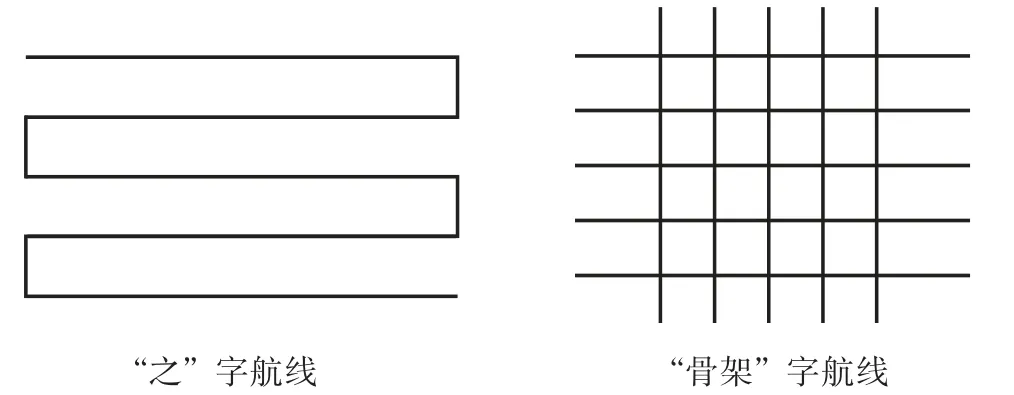
图3 航线示意图
2.2 补摄与重摄
航摄时由于某些原因出现漏摄或拍摄的照片质量不合格,应按原设计航线进行补摄或重摄。为提高重叠度,需在补拍的航线上、下各延长一条航线,以保证后期内业的模型连接。例如图4中第5条航线重叠度不足或漏片,则需针对航线4~6进行补摄[5]。
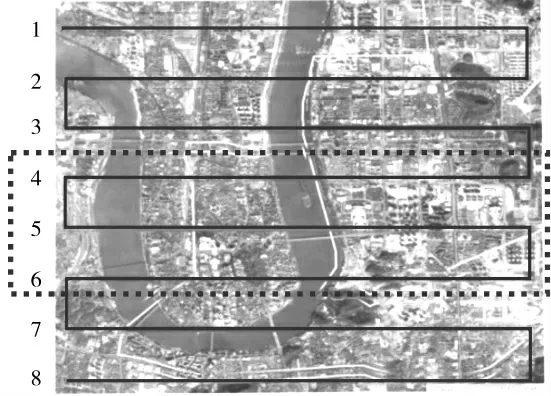
图4 航片补摄示意图
3 数据处理
3.1 影像数据预处理
由于航摄时顺光和逆光差异导致照片的饱和度、色相及亮度均不一致,因此拍摄的照片需通过与相机配套的专业软件进行匀光、匀色预处理,形成最佳影像数据。可按照以下要求进行处理:
(1)影像预处理后的照片应颜色饱和且色调丰富,其直方图接近正态分布,布满0~255色阶区间。
(2)同一条航线光线明暗差距不大时,使用同一调色模板,若差距大,应进行逐个调色。
(3)若照片有反差较差、有雾等颜色问题,在Mosaic阶段和质量检查阶段应进行调整。
3.2 POS数据预处理
POS原始数据,利用软件选择该架次距离摄区最近的基站数据进行解算,按照载波相位测量差分GPS(DGPS)定位技术,定位每张照片曝光时机载GPS的WGS84框架坐标,利用CQG2000模型加地方重力改正拟合高程;再将GPS数据和IMU数据进行联合处理,针对项目成果需要的投影和坐标系统,经过参数转换,纳入偏心角改正后,解算出每张像片的6个外方位元素。
3.3 三维建模
无人机采集的倾斜摄影数据可通过ContextCapture Center、PhotoScan等软件进行处理。由于Context CaptureCenter可以进行集群运算(多台机器同时计算),可以有效减少数据处理时间,因此建议用Context CaptureCenter进行处理。倾斜摄影可生成三维模型,同时还能生成DOM和DSM,通过专业软件处理可产生DEM和DLG[6]。
DOM(数字正射影像图):是具有影像特征的图像,通过对相片进行数字微分纠正和镶嵌,按一定图幅范围裁剪生成的数字正射影像集。
DEM(数字高程模型):是通过一组数字集合表示地面起伏形态的一种实体地面模型。
DSM(数字表面模型):是指包含树木及地表建筑物等高度的地面高程模型。
DLG(数字线划地图):是与现有线划基本一致的各地图要素的矢量数据集,其包含了各要素间的相关属性信息及空间关系信息。
4 结语
从无人机航测外业的像控点布设及测量、无人机航线规划及数据采集,内业的数据处理流程及要点,对无人机航测水利工程设施的基本流程进行简要梳理,总结出一套适用于水利工程的无人机倾斜摄影技术。与传统测绘相比,该技术具有成本低、效率高、数据准确等特点,可对地理信息进行快速获取,把原本传统测绘的大量外业工作,转变为内业工作,极大地降低了测绘人员的外业工作强度,并提升了工作效率。

猜你喜欢
建材发展导向(2022年12期)2022-08-19 02:32:00
山东煤炭科技(2022年6期)2022-07-14 03:10:40
地理信息世界(2021年2期)2021-08-14 02:11:02
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
中国交通信息化(2019年3期)2019-06-18 11:07:36
测绘通报(2018年10期)2018-11-02 10:07:28
江西建材(2018年4期)2018-04-10 12:37:50
太空探索(2016年5期)2016-07-12 15:17:58