基于网口轨迹的空间绳网捕获
2021-11-30 13:30潘仕琦徐波
航空学报 2021年11期
潘仕琦,徐波
1.南京大学 天文与空间科学学院,南京 210023
2.中山大学 航空航天学院,广州 510006
空间绳网作为柔性捕获技术的典型代表,具有便携性好、容错率高、适应性强、对载体影响小等特点,在小行星以及空间碎片的捕获任务中具有良好的应用前景[1]。例如欧空局于2001年提出的ROGER项目,旨在利用空间绳网捕获废弃卫星并转移至坟墓轨道[2-3]。
空间绳网具有复杂的非线性特征,很多研究工作集中于绳网动力学的建模,其中最常用的建模方法就是集中质量法和绝对节点坐标法。文献[4-5]完成了绳网展开的地面实验,实验验证了集中质量法的有效性。文献[6]对集中质量法和绝对节点坐标法进行了比较,说明了二者之间的优缺点。文献[7]提出了一种自碰撞检测算法来完善绳网运动过程中关于缠绕阶段的分析。文献[8]建立了空间绳网展开的有限元模型,分析了各参数对于展开效果的影响。
对于绳网和目标之间的碰撞过程,文献[9]利用冲量和动量理论研究了绳网在撞击过程中的动力学模型。文献[10]利用多体动力学仿真工具研究了绳网捕获目标的过程。文献[11-12]利用有限元离散法引入附加约束对飞网捕获过程进行建模,同时还设计了空间飞网地面碰撞实验验证仿真模型的有效性。
文献[13]基于正交试验对绳网展开参数进行了灵敏度分析。文献[14]提出了一种多目标优化方法设计绳网的参数并进行了地面实验验证。文献[15]提出了一种基于体积、表面积和距离的综合质量指标识别绳网捕获目标的过程是否成功,代替可视化的检验,通过质量指标数值的变化对捕获结果的成功与否进行判断。
现有的研究很少涉及对于绳网成功捕获目标过程的评价指标以及相关参数对绳网捕获目标过程的整体影响。对于相同的绳网,不同的捕获参数选择将导致不同的捕获结果。尤其是在捕获仿真开始前,选择有效的捕获参数可避免多次重复性的尝试实验,节省大量的实验时间。为解决这一问题,本文提出基于网口轨迹的分析方法,建立绳网捕获目标过程的仿真,提出绳网成功捕获目标的评价指标,分析不同捕获参数对于绳网捕获目标过程的影响,以期为捕获参数的选择提供直观依据,并以此提高捕获仿真的成功率。
1 动力学模型
采用集中质量法建立空间绳网的动力学模型,该方法假设绳网的质量全部集中在绳网的各个节点上,并且每个节点的质量都等于其相邻绳段质量之和的一半。节点之间的绳段用一个无质量的弹簧阻尼单元表示。通过建立全部节点的动力学方程可近似表示绳网的动力学模型,网格的数量越多,模型的精度越高[16]。
图1为使用的空间绳网的几何构型。在该绳网的4个顶点处均安装有牵引质量块,通过发射牵引质量块,可以使绳网在自由空间中展开[17]。

图1 绳网的几何构型
在绳网的牵引质量块与边缘中心节点处还装有额外的“围栏”绳段。如图2所示,如果没有这些绳段,绳网在展开过程中周围会出现4个较大的缺口,目标易从其中脱离。初始时刻绳网处于收缩状态,各节点按几何构型摆放在同一平面内,并且两两节点之间的距离远小于它们之间绳段的原长。基于这一初始平面,以初始时刻绳网的中心为原点,建立了如图3所示的坐标系。
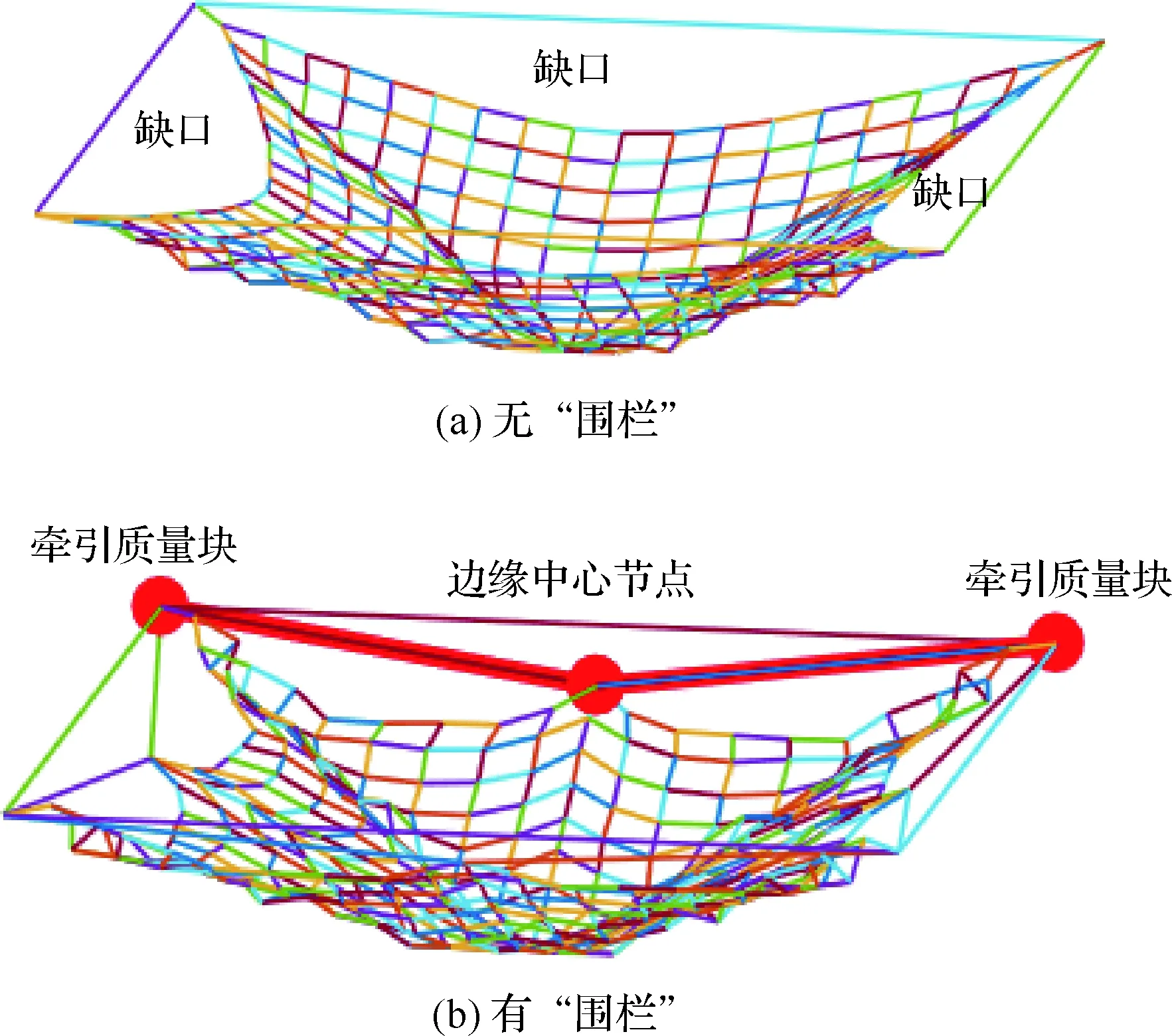
图2 “围栏”绳段的作用

图3 坐标系
对于绳网的第i个节点,忽略引力作用,在自由空间中,它的动力学方程可由牛顿第二定律表示为
(1)

1.1 张 力
作用在第i个节点的张力可以表示为
(2)

(3)
式中:eij为由节点i指向节点j的单位向量;lij为绳段Uij的原长;kij和cij分别为绳段Uij的等效弹簧系数与等效阻尼系数[16],可由式(4)和式(5)计算得出:
kij=EAij/lij
(4)
(5)
式中:E、ζ和ρ分别为绳段材料的拉伸模量、阻尼比以及密度;mij和Aij分别为绳段Uij的质量以及横截面积。
1.2 接触力

(6)

(7)


(8)
式中:μ为摩擦系数。
通过对所有节点的动力学方程进行积分并使用线段按绳网几何构型连接各节点,可得到绳网的动力学仿真模型。
2 动力学仿真
假设空间绳网的材料为尼龙,相关仿真用到的绳网参数如表1所示。捕获对象为米级的地外微小天体,考虑目标皆由岩石构成,相关的材料参数如表2所示。
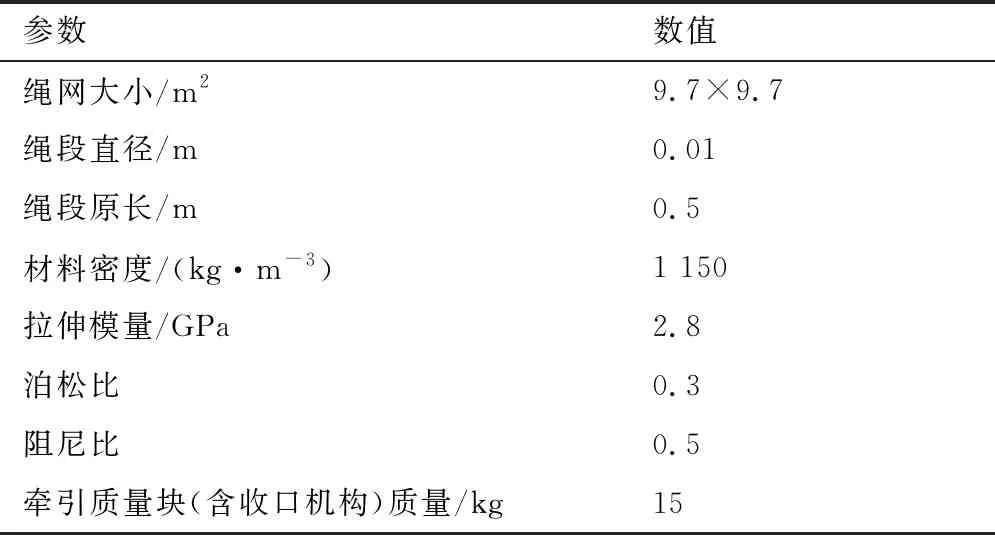
表1 绳网模拟参数
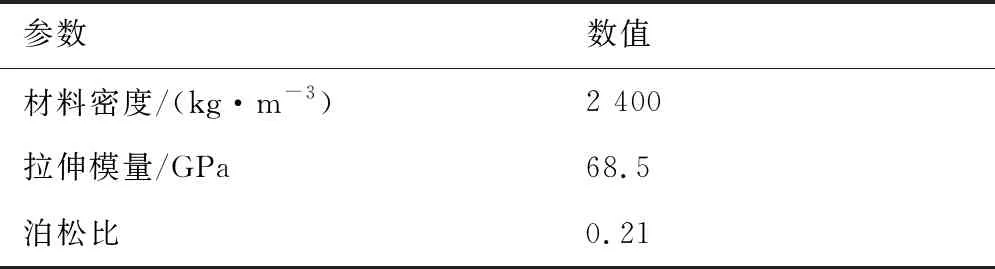
表2 目标的材料参数
初始时刻除4个牵引质量块外,其余节点的初速度均为0。4个牵引质量块(D1,D2,D3,D4)拥有相同的发射速度大小v0。发射角度θ被定义为发射速度矢量与z=0平面的夹角。具体的,4个牵引质量块的发射速度矢量可以表示为
(9)
绳网的网口由4个牵引质量块及它们之间的绳段组成。为更好地捕获目标,在绳网的4个牵引质量块处均安装有相应的收口装置。在包裹目标的过程中,收口装置可主动收缩并锁紧网口,以防止目标挣脱绳网的包裹。像绞盘、卷筒一样[19-20],收口装置可主动将网口处的绳段收进装置内,而牵引质量块之间的相对距离在这一过程中会不断减小,直到网口被完全关闭。绳网收口过程如图4所示。
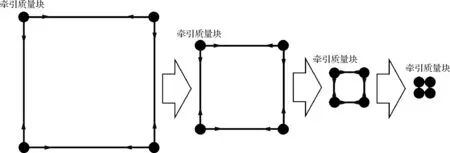
图4 收口过程
如图5所示,绳网捕获目标的过程按时间顺序会依次经历自由展开、包裹目标以及利用收口装置捕获目标这3个捕获阶段。为实现完整的捕获过程,在已知绳网参数的情况下还需确定其他捕获参数,如发射速度、捕获距离、收口时机以及偏心距离等。不同的捕获阶段涉及的捕获参数不同,对于捕获参数的分析也存在先后顺序,例如自由展开阶段涉及的发射速度影响全部捕获阶段,如果不能首先确定后续的捕获阶段将无法进行。而在利用收口装置捕获目标阶段涉及的收口时机不影响前期的捕获阶段,可最后确定。为逐一分析这些捕获参数,按绳网运动的时间顺序建立了3种不同的仿真过程,即: ① 仅包含自由展开阶段的绳网自由展开过程; ② 包含自由展开及包裹目标阶段的绳网包裹目标过程; ③ 包含全部3个阶段的绳网捕获目标过程。
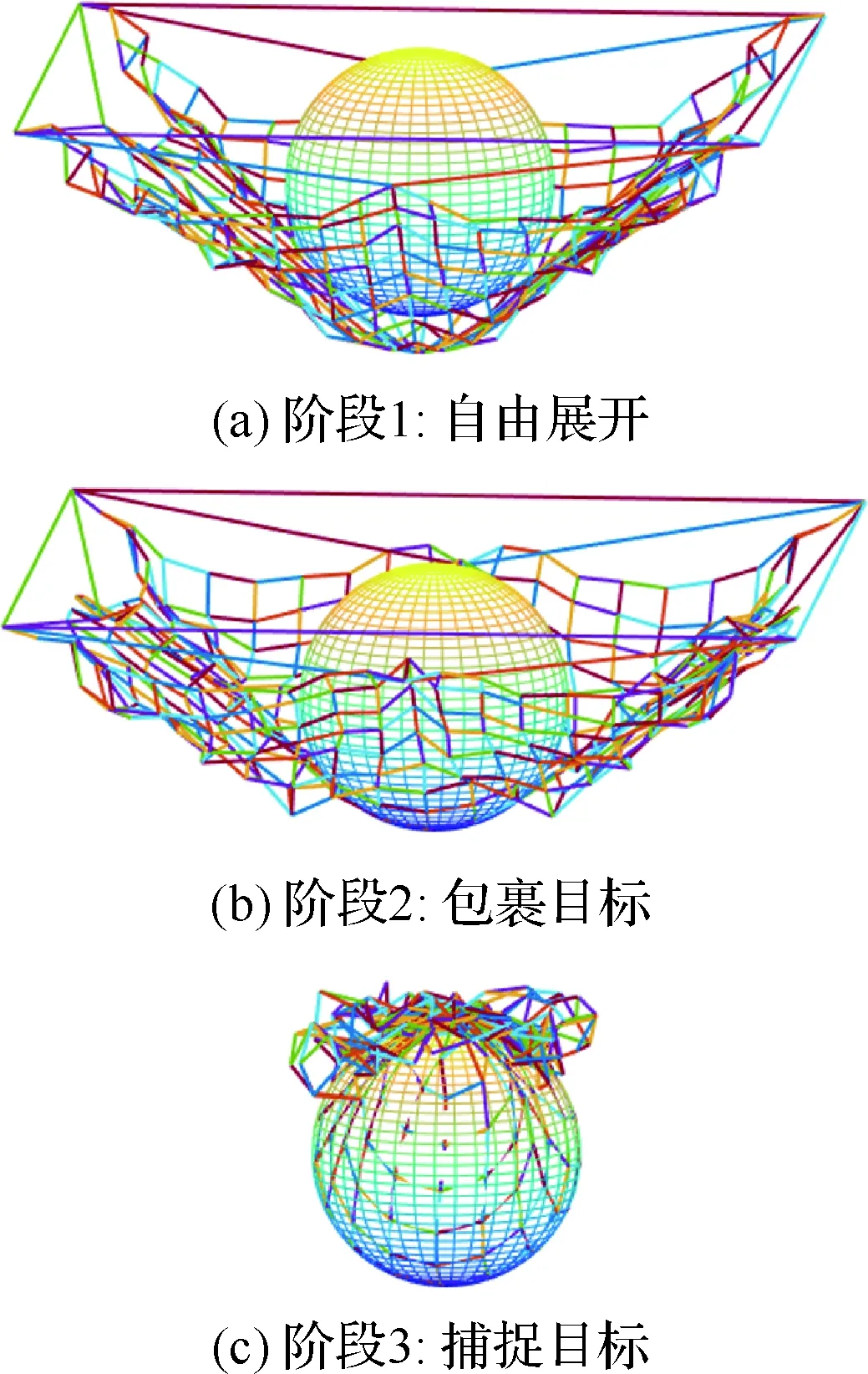
图5 捕获过程的3个阶段
在绳网的运动过程中,绳网的网口是其捕获目标的关键。由于绳网上的节点相互连结、没有缺口,网口成为空间目标进入和脱离绳网包裹范围的唯一出入口,其运动轨迹可以反映绳网捕获目标过程的进行状态以及捕获的结果。如果捕获成功,在目标逐渐穿过网口之后,网口会收缩、闭合并长期处于目标周围,而如果捕获失败,网口将会随着绳网远离目标。因此,本文将网口的运动轨迹作为评价绳网捕获目标过程是否成功的依据,并分别对上述3种仿真过程中的网口轨迹进行分析,评估相关捕获参数对于绳网捕获目标过程的影响。
2.1 绳网自由展开
首先,不考虑与目标之间的接触,建立绳网自由展开过程的仿真,初始发射速度与初始发射角度暂定为10 m/s和30°。如图6(a)所示,0~1.79 s 时,牵引质量块带动绳网展开,网口逐渐增大,绳网整体呈现凹型(如图6(b)所示);1.79~4.36 s时,网口逐渐收缩,中心区域节点带动绳网继续运动,绳网整体呈现凸型(如图6(c)所示);在4.36 s时网口完全闭合,4个牵引质量块开始发生接触。文献[7]对绳网自碰撞的过程进行了详细的描述,在网口第一次闭合后,绳网将逐渐发生缠绕,网口无法打开也无法包裹目标。因此,只考虑从绳网发射到网口第一次闭合的过程。
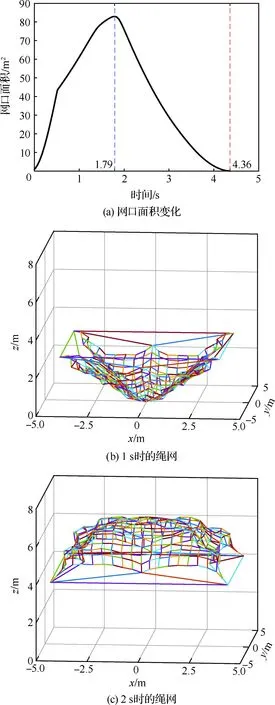
图6 绳网自由展开过程
在这个过程中网口的运动轨迹如图7(a)所示,其在空间中构成了一个几乎封闭的立体图形(称为轨迹图形),该轨迹图形的每一层均代表某一时刻网口的位置。绳网包裹目标的过程实际上是网口从目标的一侧逐渐穿过目标到达目标另一侧的过程,在该过程中每一时刻网口的面积均需大于目标在相应位置的横截面积。对于一次成功的绳网捕获目标过程,其评价指标为在捕获完成前目标不应与网口发生接触,并顺利通过网口进入绳网的包裹。反映在网口轨迹上,目标应位于轨迹图形的体内,如图7(b)所示。这样可以初步限制目标的形状和大小以及捕获距离。

图7 轨迹图形
由于对称性,取其中一个牵引质量块的轨迹,将其投影至xOz平面。牵引质量块的轨迹可反映网口的运动轨迹,而牵引质量块的横坐标大小可反映网口的大小。如图8(a)所示,牵引质量块的轨迹与坐标轴之间形成了一个封闭区域,称为轨迹区域。在轨迹区域内,有两个重要的位置影响着轨迹区域的形状:一个是网口面积最大的位置,称为最大展开位置,它是牵引质量块轨迹变化的拐点;另一个是牵引质量块到达z轴的位置,称为网口闭合位置,它是牵引质量块轨迹的终点。
轨迹区域的形状和大小决定了绳网能够捕获的目标形状和大小以及捕获距离。假设目标为一个旋转体(如圆柱、圆台、球等几何体),并且轴线沿z轴方向,则由于对称性,待捕获目标的横截面应位于该轨迹区域内。如图8(b)所示,初步选择一个球体目标H1,其半径r=1.4 m,球心高度为1.8 m,满足上述条件。
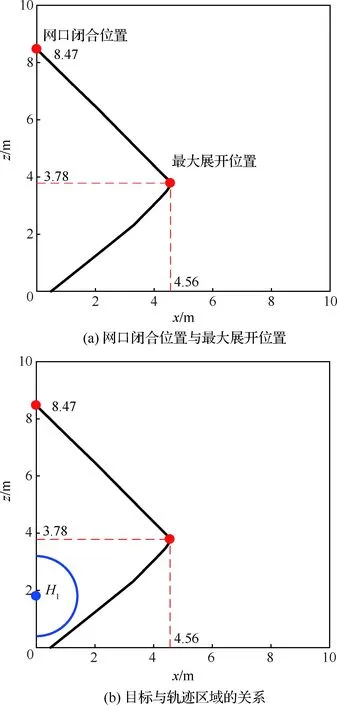
图8 轨迹区域
除绳网材料及绳网大小等绳网本身的参数外,发射速度对轨迹区域的变化也起着重要的作用[21]。如图9所示,不同的发射速度v0会导致最大展开位置和网口闭合位置出现小范围波动。虽然对轨迹区域形状的影响效果并不明显,但是从时间的角度分析,发射速度改变了该过程的持续时间,发射速度越大,牵引质量块到达网口闭合位置的时间越短。

图9 发射速度对轨迹区域的影响
而不同的发射角度θ则明显地改变了轨迹区域。图10(a)为同一绳网在4种不同发射角度下的网口轨迹,可见随发射角度增加,牵引质量块在z方向的初速度分量逐渐增大,而在x方向的初速度分量逐渐减小[6],最大展开位置(x分量)逐渐减小,而网口闭合位置(z分量)逐渐增大。通过分析该绳网在更多发射角度下的网口轨迹(图10(b)和图10(c))可知,这种变化情况更加明显。图10(c)以发射角度为0°时的最大展开位置为基准,计算了各发射角度下最大展开位置减小的比例。可以看出发射角度在50°以下时,最大展开位置随发射角度的变化并不明显,但当发射角度大于50°时,随着发射角度的增加最大展开位置减小的百分比逐渐增大,最大展开位置逐渐减小。对于扁宽型的目标(x方向较长,z方向较短)可选择较小的发射角度,而对于细长型的目标(x方向较短,z方向较长)可选择较大的发射角度。此外,由于最大展开位置减小的百分比在发射角度较小时几乎为0,最大展开位置的横坐标存在上限,目标的宽度选择(x方向的长度)也存在上限。

图10 发射角度对轨迹区域的影响
2.2 绳网包裹目标
由于绳网包裹目标过程会首先经历自由展开阶段,因此在绳网自由展开过程中初步确定的捕获参数(如发射速度和角度、目标的形状和大小以及捕获距离等)可作为绳网包裹目标过程的初始参数,而对绳网包裹目标过程的分析是对这些捕获参数的进一步检验。
依然以球体目标H1为例,图11为绳网自由展开过程与绳网包裹目标过程的网口轨迹对比,两条网口轨迹在开始时是重合的,而在绳网中心部分与目标底部发生接触后两条轨迹开始分岔,绳网包裹目标过程的网口轨迹开始向内弯曲,牵引质量块逐渐向中心聚拢[22]并与目标发生接触。由于接触力的作用,牵引质量块被目标表面弹开,背离目标运动。图11中长划线为目标轮廓线在接触点处的切线,短划线为目标球心与接触点的连线。由于接触点及接触角度的特殊性,牵引质量块在与目标接触时,获得了沿z轴正向并且靠近z轴方向运动的加速度,并使牵引质量块最终到达了z轴。虽然此时网口闭合,绳网包裹住了目标,但在该过程中牵引质量块与目标的接触会损坏收口装置,从而导致捕获失败,因此该情形下绳网包裹目标的过程依然是失败的。
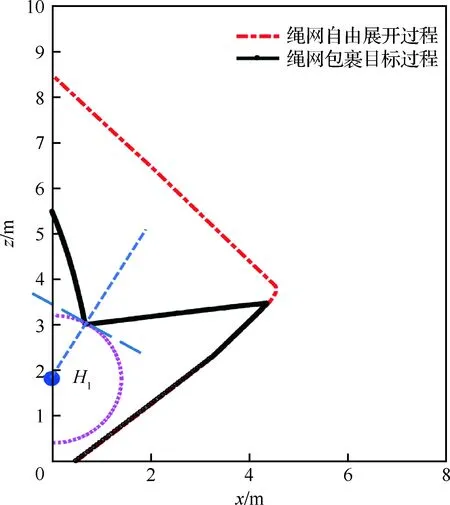
图11 绳网自由展开过程与绳网包裹目标过程的轨迹对比
网口轨迹可连续地反映绳网包裹目标的关键过程,这是分析网口轨迹的一个优势。而如图12所示,如仅根据这一过程中某些离散时刻的位形图进行分析会遗漏网口运动的关键信息,从而无法发现网口与目标的接触过程。
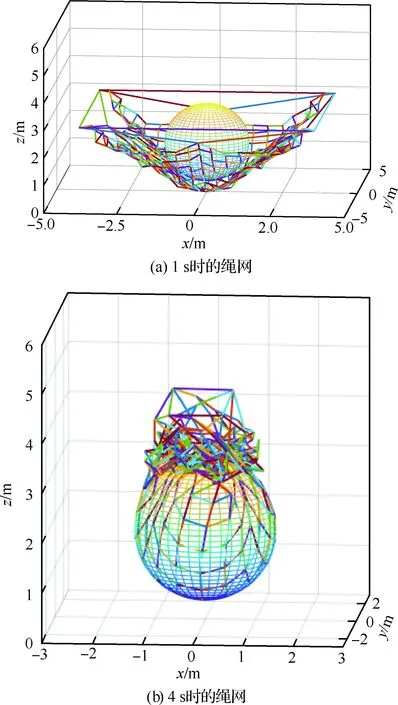
图12 绳网包裹目标过程
为便于对绳网包裹目标的过程进行分析,网口轨迹的终点应选在网口第一次闭合或网口第一次与目标发生接触时的位置。
捕获距离影响着绳网包裹目标的结果。捕获距离h定义为在初始时刻绳网中心与目标最低点在z方向的距离,即为目标最低点的z坐标。以示例目标H1为例,在图11中捕获距离为0.4 m,如前所述,牵引质量块在运动过程中会因与目标表面发生接触而导致捕获失败。但如果不断增大其捕获距离,如图13所示,网口轨迹会不断趋向于自由展开时的轨迹,并且牵引质量块也不再与目标发生接触,绳网可以顺利包裹住目标。捕获距离的增大减少了绳网与目标接触的时间,降低了因接触导致的网口轨迹向内弯曲的程度。因此在选择捕获参数时应选择较大的捕获距离,提高绳网包裹目标的成功率。
2.3 绳网捕获目标
为实现对目标的捕获,在经历了绳网自由展开以及绳网包裹目标阶段后,还需通过收口装置实现对网口的收缩以及锁紧,防止目标从绳网的包裹中逃出。收口装置通过将牵引质量块间的绳段收进装置内减少网口的大小,在这一过程中牵引质量块受沿绳方向的拉力而不断相互靠近。
图11为绳网在不开启收口装置情况下包裹目标的过程,可见网口与目标发生接触时绳网尚未完全包裹住目标,是一次失败的包裹过程。但在图11中,由于网口轨迹最高点的z坐标大于目标最高点的z坐标,如果在网口到达最高点时开启收口装置,可以迫使网口立即收缩,快速闭合,完成对目标的包裹。而在包裹目标之后只需再利用收口装置锁紧网口大小,就可完成捕获。开启收口装置捕获目标过程的网口轨迹如图14(a)所示。在该仿真中收口装置对牵引质量块提供恒定的拉力作用(收口拉力取为100 N,方向始终沿绳方向)。

图14 绳网捕获目标过程
因此,可利用收口装置提供的主动收口力改变原有的网口轨迹。通过在网口高于目标最高点时开启收口装置,主动完成对目标的包裹与捕获。收口装置的使用以及收口时机的选择提高了绳网对目标的包裹能力及绳网捕获目标的成功率。
2.4 偏心捕获目标
在2.2与2.3节的示例中,绳网的运动方向位于绳网中心与目标中心的连线上,属于对心捕获。因此由于对称性,可将三维情形投影至二维平面内进行网口轨迹的分析。
考虑更一般的情况,选择一个偏心放置的球体作为目标,其半径r=1.2 m,捕获距离为0.6 m。偏心距离定义为目标球心在x轴的坐标,选定为0.5 m。绳网的发射状态保持不变。此时的捕获方式为偏心捕获。由于失去了对称性,因此只能通过立体轨迹图形对该目标的捕获过程进行分析。
首先,该目标位于绳网自由展开过程的轨迹图形内,满足被绳网包裹的初始条件。然后,建立绳网包裹目标过程的仿真,如图15所示,由于非对称性,绳网中靠近目标一侧的部分受到的接触力作用大于另一侧,牵引质量块的轨迹明显向内弯曲。图15中目标两侧牵引质量块轨迹的最高点均高于目标的最高点,因此可利用收口装置捕获该目标。选择在牵引质量块到达最大展开位置时开启收口装置,在收口过程中收口装置对牵引质量块提供恒定的拉力作用(收口拉力取为100 N,方向始终沿绳方向)。开启收口装置的绳网捕获目标过程的网口轨迹如图16所示。
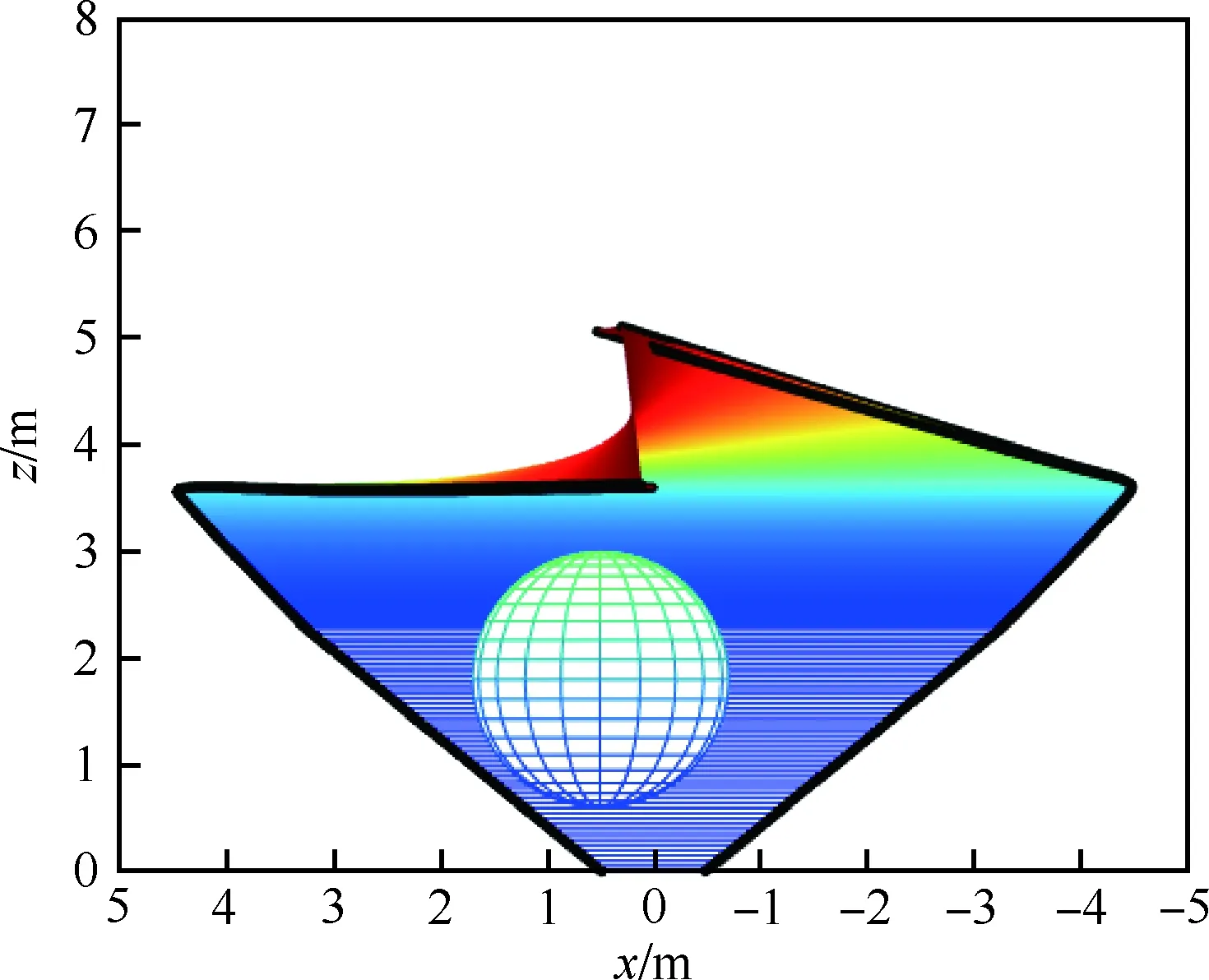
图15 偏心捕获下绳网包裹目标过程的轨迹

图16 偏心捕获下绳网捕获目标过程的轨迹
在偏心捕获的过程中,绳网与目标接触时产生的摩擦力影响网口轨迹的变化。图17为同一绳网包裹目标过程在有摩擦与无摩擦情况下的对比。当偏心距离为0时,两种情况下的网口轨迹几乎重合,但随着偏心距离的增大,两种网口轨迹开始逐渐分离,并且分离程度逐渐增大。当偏心距离达到0.8 m时,有摩擦情况下靠近目标一侧的牵引质量块轨迹在轨迹终点处仍处于目标上方,此时目标依然位于绳网的包裹中;而在无摩擦情况下网口会与目标发生接触,导致捕获失败。因此考虑绳网与目标接触时产生的摩擦力不仅使模型更加完善,而且摩擦力减小了由于接触作用导致网口轨迹向内弯曲的程度,有利于对目标的捕获。
此外,如图17虚线部分所示仅考虑有摩擦情况下的网口轨迹,随着偏心距离增大,目标两侧牵引质量块轨迹的偏离程度也逐渐增大。偏向目标的一侧牵引质量块轨迹向内弯曲程度逐渐增大,这使牵引质量块在运动过程中更易与目标发生接触,从而导致捕获失败。因此在捕获过程中应尽可能地保持对心捕获的捕获方式。
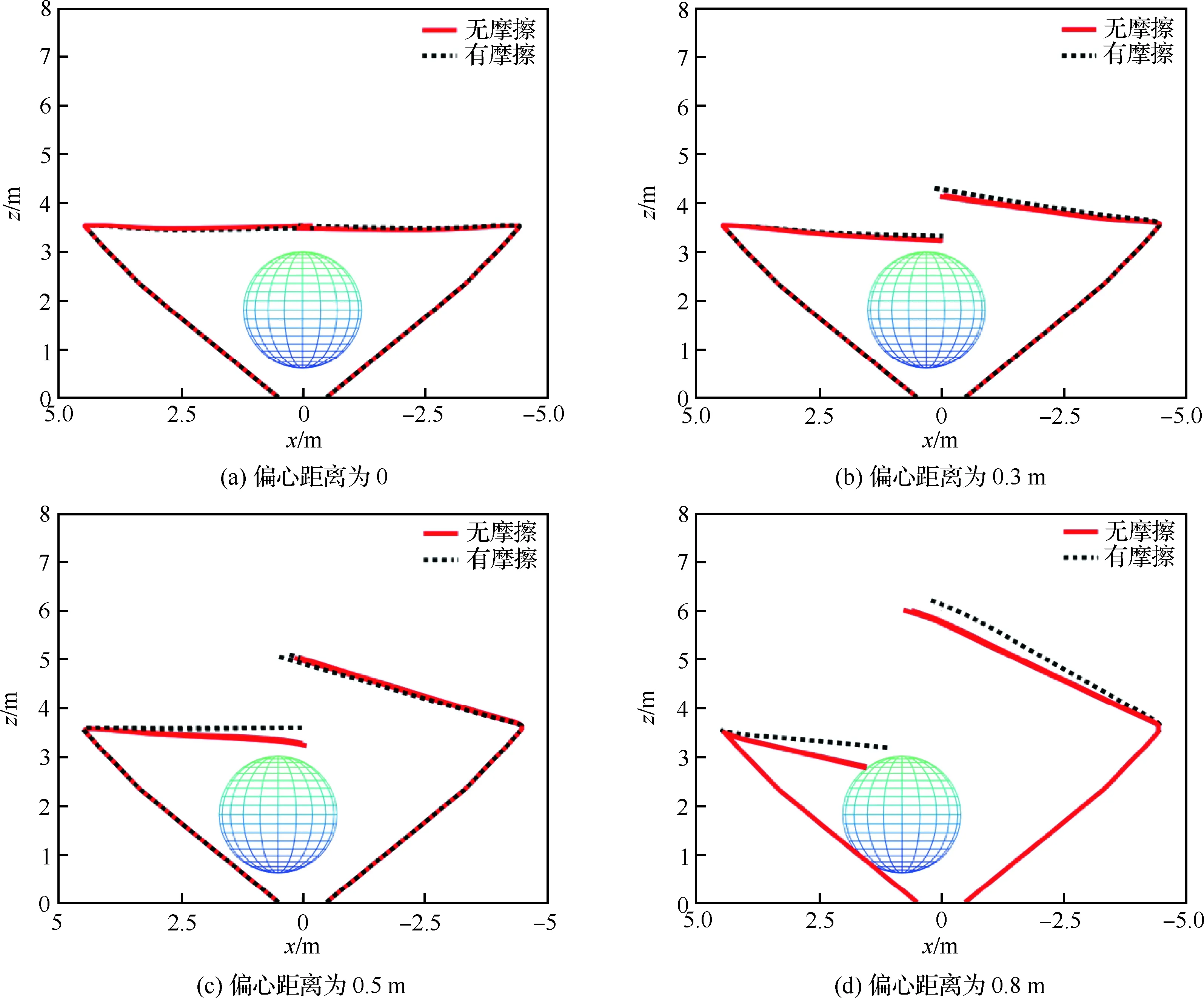
图17 不同偏心距离下有摩擦与无摩擦的轨迹对比
3 结 论
将绳网捕获目标的过程按时间先后顺序分为自由展开、包裹目标及利用收口装置捕获目标3个阶段,并以此对绳网运动过程中的网口轨迹进行分析。提出了一种评价绳网成功捕获空间目标的指标,该指标要求目标始终位于网口的轨迹图形内。根据这一评价指标,结合网口的轨迹图形提出了一种确定有效捕获参数的方法,即首先通过绳网自由展开过程确定初始捕获参数,然后通过绳网包裹目标过程对初始捕获参数进行检验,并确定收口装置的开启时机,最后利用这些捕获参数实现完整的绳网捕获目标过程。
此外,本文还讨论了相关捕获参数对于网口轨迹以及绳网捕获目标过程的影响。仿真结果表明在绳网自由展开过程中,牵引质量块的发射速度越大,其到达网口闭合位置的时间越短。发射角度越大,网口闭合位置越大,而最大展开位置越小。对于绳网包裹目标过程,选择较大的捕获距离有利于绳网包裹目标;而在绳网捕获目标过程中,选择合适的收口装置开启时机可提高绳网对目标的包裹能力及绳网捕获目标的成功率。除了对心捕获,还对偏心捕获的情况进行了分析,并说明了在偏心捕获中考虑摩擦力的重要性。仿真结果表明偏心距离的增大不利于绳网包裹目标,因而在捕获仿真中应尽可能地采用对心捕获的方式完成对目标的捕获。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
求知导刊(2018年19期)2018-09-07
故事作文·高年级(2018年8期)2018-08-14
故事会(2017年14期)2017-07-25
建筑科技与经济(2016年4期)2016-08-16
人生十六七(2015年5期)2015-02-28