
可同时识别拉伸与压力的柔性传感器设计与应用
2021-11-29 04:52王莎莎胡特特
仪表技术与传感器 2021年11期
王莎莎,胡特特
(1.中南大学机电工程学院,湖南长沙 410083;2.中南大学高性能复杂制造国家重点实验室,湖南长沙 410083)
0 引言
人体运动监测是当今国际学术研究的热点问题之一,而传感器是实现人体运动监测的先决条件。研究开发可同时监测拉伸与压力信息的柔性传感器是非常迫切且是最具有挑战性的,这种传感器将在运动健身、人机交互、医疗康复和娱乐等领域具有广泛的应用前景[1-3]。
同听觉、嗅觉、视觉和味觉相比,触觉是最难模仿的感觉,且感知的信息更为复杂,传感器作为实现人体运动监测的关键技术,将影响可穿戴电子设备的设计与未来发展[4-5]。许多可穿戴和可植入传感器已经在动作捕捉和健康监测方面取得了显著的发展。传统传感器的电极多由具有固定脆性和刚性的单晶硅、多晶金属和金属氧化膜或不能扩展的石英光纤组成,极大地限制了传感器的大变形(拉伸、扭转和弯曲),也难以与曲面紧密结合,不适用于人体运动的监测,极大地影响了软体机器人、可伸缩电子和生物医学等研究领域的应用与发展[1,6-8]。因此,设计与制造兼顾高柔性、可拉伸性、轻量化、稳定性和耐用性的传感器具有重大的研究意义和应用价值[2]。
目前,很多学者在可拉伸传感器、可穿戴传感器和人造皮肤等方面的研究已经取得很大进展。H.Jeong[9]等人利用聚二甲基硅氧烷和银纳米线设计了一种新型柔性气隙压力传感器。通过电流大小判定电路通断,以此检测外部压力,虽然该传感器的灵敏度可达16.1 kPa-1,但该传感器只能用于检测压力而无法检测拉伸应变。早稻田大学纳米科学与纳米工程专业的T. Kasahara[10]等人用PET作为固定框架,利用导电硅胶制作了一种电容式压力传感器,按压时通过改变电极之间距离检测电容的变化,所检测的力可达10 N。由于利用PET这种不可拉伸的材料做传感器的框架,所以该传感器也只能实现压力检测无法拉伸。诸如上述传感器的绝大多数柔性压力传感器都是基于电阻式[11-14]、电容式[15-19]或压电式[20]原理对压力信号进行检测的传感器,普遍存在响应信号单一、无法拉伸和延展性差的问题。另一方面,在柔性可拉伸传感器[21-24]方面的研究也取得了一定成果。较为突出的卡内基梅隆大学的M. D. Bartlett[25]等人利用导电硅胶制作了一种电容式拉伸传感器,可用于监测手部运动。上海交通大学[26]依靠水凝胶制作了电阻式的柔性应变传感器,用于手部运动监测。此类传感器虽可响应拉伸与按压2种信号,但都存在局限是只通过1个参数(电阻,电容或电流)的变化来识别或响应不同的变形模式(弯曲、压力、拉伸或扭转)。所以这些柔性传感器无法明显区分拉伸和按压2种刺激。因此,迫切需要开发一种可同时检测和区分拉伸与压力信号的柔性传感器。
针对以上问题,本文提出了一种基于电阻式和电容式原理的柔性传感器,与目前很多只通过1个参数识别变形模式、无法区分拉伸与压力2种刺激或只能实现压力检测的柔性传感器不同,该传感器通过2种参数(电容和电阻)既能检测拉伸信号,同时能感知压力并检测其大小,极大地丰富了传感器的功能,为应用于人体运动检测、医疗康复、机器人技术和人机交互的集高延展性与感知外部按压的人造皮肤提供了参考。
1 传感器的设计和制作
本文研究了一种可同时识别拉伸与压力的柔性传感器,如图1所示。该传感器为垂直结构,上部模块为电阻式传感器,下部模块为电容式传感器,由硅胶封装。上模块即电阻传感器检测来自外部的压力反应,下模块即电容传感器检测拉伸变化,该传感器具有同时检测压力和拉伸的特点。

图1 传感器结构图
1.1 传感器的设计
本文提出的传感器基于电容式传感器和电阻式传感器原理,电容式传感器是通过应变改变两电极板之间的距离改变电容的大小,以此检测应变信号;电阻式传感器通过应变改变传感器的电阻值,通过电阻或电流的变化感知应变。如图1所示,本文提出的传感器由电阻模块和电容模块两部分组成。电阻模块结构由上至下依次为:上层绝缘硅胶保护层、上层导电硅胶层、介电空心层和下层导电硅胶层,其中介电空心层为中间设有开孔的介电材料。
电容模块结构由上至下依次为:上层导电硅胶层、电容介电层、下层导电硅胶层和下层绝缘硅胶保护层。电阻模块的下层导电硅胶层与电容模块的上层导电硅胶层为同一个导电硅胶。在电阻模块的上、下层导电硅胶层和电容模块的下层导电硅胶层分别布置导线。两层绝缘硅胶保护层起到封装和保护传感器的作用。
按压传感器时,上、下导电硅胶层接触,可检测到电阻值明显变化,同时两层导电硅胶层的接触面积越大检测到的电阻越小,从而可通过电阻值变化ΔR判断传感器是否受压并能识别所受压力大小。
拉伸传感器时,电容模块的电容介电层变薄,上下两层电导电硅胶距离缩短、电容变大,根据电容值变化判断拉伸应变大小。
1.2 传感器的制作
制作传感器的材料必须满足高延展性、可切割、良好粘结性和绝缘性等条件。为了满足上述条件,选择了市场上已有的材料:电阻模块的介电空心层(VHB4905,厚度0.5 mm),导电硅胶层(导电硅胶垫,厚度0.5 mm),电容模块的电容介电层(ELASTOSIL FILM2030,厚度0.1 mm)以及绝缘硅胶层(Ecoflex00-30)。这些材料都具有极高的延展性,此外,介电空心层的固有黏性可以确保其与导电硅胶层紧密贴合。
柔性传感器的制作过程如图2所示。首先,准备已切割完成的介电空心层,将双面导电布作为导线布于介电空心层的上下两面,导电布具有黏性,可让传感器每一层的堆叠更加贴合和牢固。再将已切割完成的导电硅胶贴于介电空心层上下两面。

图2 传感器制作过程与实物
为使电容模块中的两层导电硅胶和电容介电层更好的贴合,用氧等离子清洗机进行表面改性处理,将处理后的表面贴合。再将导电布作为导线贴于电容模块的下层导电硅胶上。
最后,为使传感器更加牢固和可靠,将Ecoflex00-30硅胶A、B两组分以1∶1的质量比混合,放入真空脱泡机处理5 min,以减少固化过程中产生气泡。将处理好的硅胶倒在涂布基底上,使用涂布机制作上下绝缘硅胶保护层,之后在涂布机加热板上50 ℃加热1 h,形成柔性传感器的保护层,完成传感器的制作。
制作完成的应变传感器可以反复拉伸、扭转、弯折,同时不影响传感器的性能。
2 实验验证
2.1 性能实验
为了测试传感器的拉伸载荷和压力载荷,搭建了传感器测量系统,包括丝杆拉伸平台、力传感器(SMT10N)、LCR数字电桥测量仪(IM3536)和计算机,实现对传感器的稳定性、耐用性和重复性的评估。
首先,为了测量拉伸载荷,使用亚克力板夹住传感器的两端并用螺栓将传感器固定在丝杆滑块上,通过编程控制电机以恒定速度稳定拉伸传感器,电容变化由LCR测量,并通过计算机连续采集数据。在传感器拉伸速度为50 mm/s的情况下,拉伸应变量为20%、40%、60%和100%时,传感器相对电容(C/C0)的变化如图3所示,可见传感器每一段的应变都很容易区分且波动变化微小。传感器连续加载100%并完全卸载(图4),得到传感器加载与卸载的线性度R2=0.9836,由图4可以看出传感器加载与卸载过程曲线重合性良好,说明传感器有着较小的滞后性。将柔性应变传感器以150 mm/s的速度反复拉伸12 000次,每次拉伸应变量设置为100%,实验数据表明传感器的电容值总是能恢复到拉伸初始状态的值,另外,在这12 000次循环拉伸中,传感器的电容值一直保持在一定范围内(图5),表明传感器有长期使用的能力,在大应变下和循环载荷下具有良好的鲁棒性。

图3 拉伸过程电容变化

图4 加载和卸载过程
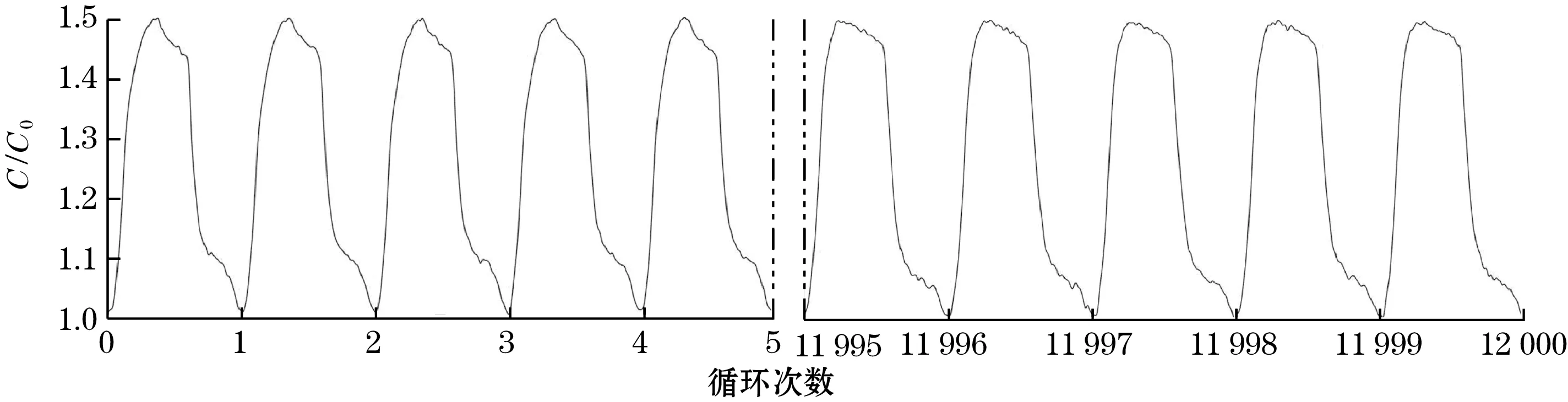
图5 12 000次重复拉伸
对传感器的压力进行检测,如图6所示。按压前,电阻模块上下电极未接触,LCR电桥测得电阻值可达0.8 GΩ;当传感器受到压力时,电阻模块上下接触,电阻值明显变小。按压前后电阻值变化极其明显,电阻变化可达5个数量级,极易检测到传感器是否受到压力刺激。另一方面,按压前后电阻有5个数量级变化,由于受压前后电阻值相差过于悬殊,所以在整体图中,传感器受压时电阻变化相对不够明显,当局部分析传感器受压时的电阻数据,通过图6可明显看到传感器随压力的增大电阻逐渐变小,表明传感器在受到按压时,能够识别一定范围内的压力大小(传感识别范围可达0~120 kPa,电阻变化范围可达5~13 kΩ)。最后,检测温度对传感器初始值的影响。在室温23 ℃下测量传感器的电容值变化(图7),可见传感器电容值在23 ℃下波动很小,基本保持在某一固定值(-48.7 pF)不变,此时电阻模块未受到按压,保持断路状态。

图6 按压过程电阻变化

图7 室温(23 ℃)对传感器的影响
由此可见,柔性应变传感器具有良好的拉伸性、耐用性、重合性和鲁棒性,非常适用于监测人体运动状态,而同时感知和区分拉伸与按压2种信号的功能更为后续人造皮肤的设计与制造提供了参考。
2.2 实用场景验证
传感器在人体运动检测中的潜在应用,如图8(a)、图8(b)所示,将传感器放于手背的掌指关节上,明显看到传感器可以清晰地识别出关节弯曲30°、60°和90°,根据弯曲角度的不同,传感器作出相应响应,表明传感器可以测量手指弯曲程度,在运动健身、人机交互、手语识别和娱乐等领域有潜在应用价值。同时在手指弯曲时按压掌指关节,由图8(c)、图8(d)看出传感器在受到压力时电阻明显变小,由于按压前后电阻值变化悬殊(5个数量级的变化),在整体图中较难看出变化趋势。随机选择电阻明显变小的某一时刻如图8(d)局部放大可见,随时间(4 s内)逐步增大压力,同时传感器的电阻值也随时间逐渐减小。由于传感器在指关节弯曲且未按压时传感器的电阻值依然保持在6 GΩ,验证了传感器在弯曲时电阻模块依然处于断路状态,只有受到外界压力时电阻才有明显的变化,可见传感器的电阻模块受拉伸应变的影响小,只对压力应变响应强烈,表明传感器具有高可靠性。传感器在拉伸状态下依然可识别外界压力,表明传感器兼具检测和区分拉伸与压力2种应变信号的能力,弥补大多数传感器信号单一、难以区别压力应变与拉伸应变的缺点,使人体运动监测全方位,使机器人功能多样化,扩大了机器人的应用范围。在医疗方面,可以让假肢手拥有和人类皮肤一样可识别外界刺激的能力,帮助患者正常生活。
通过肘关节的弯曲(图9(a)、图9(b))可以清晰地看出传感器随肘关节的弯曲与伸展作出不同的响应,由于肘关节每一次弯曲的幅度、速度不同,传感器会根据受试者肘关节的弯曲幅度和弯曲速度的不同作出不同的响应,表明传感器具有测量速度的潜能。为检测传感器感知外界压力的能力,在肘关节弯曲时按压肘关节,并且逐步增加按压的程度,从图9(c)、图9(d)可以看出传感器在受到压力时电阻依然有明显的变化,同时随按压程度的增加电阻变小,再次体现了传感器具有高可靠性。
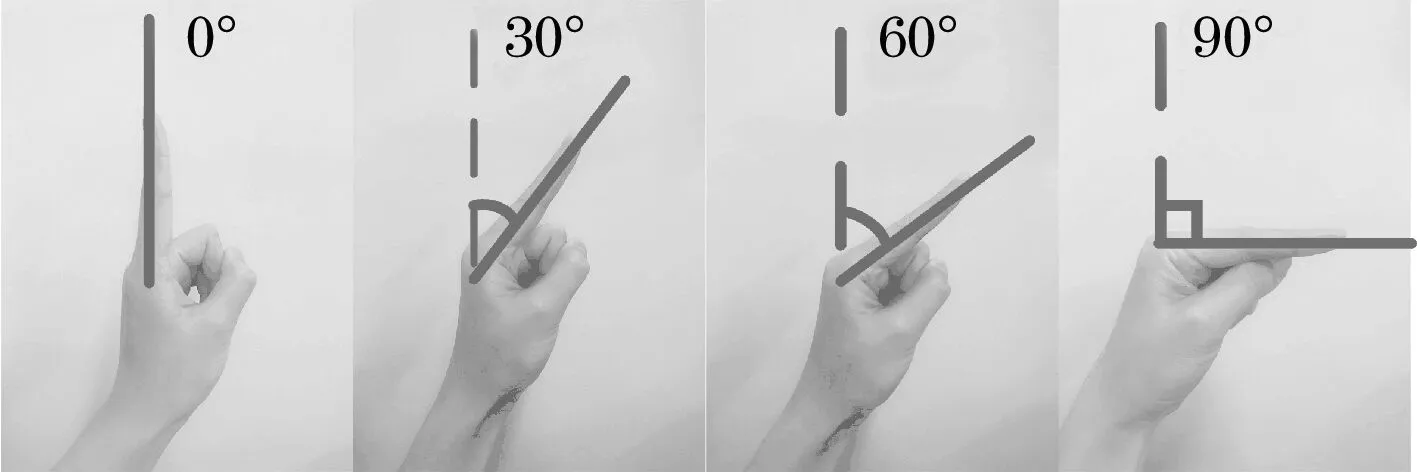
(a)掌指关节弯曲不同角度

(b)掌指关节弯曲不同角度时传感器响应情况

(c)弯曲并按压掌指关节

(d)弯曲并按压掌指关节时传感器响应情况图8 传感器在掌指关节上的应用
如图10(a)、图10(b)所示,对传感器进行扭转测试,当受试者前臂向外旋时,桡骨相对于附着的传感器有明显的移动,从而扭转传感器使其变形并改变传感器的电容值。当外旋时,传感器的电容值变大;当内旋时手臂恢复到原先状态,传感器回到初始状态,相对电容值也变回到初始状态(C/C0=1)。
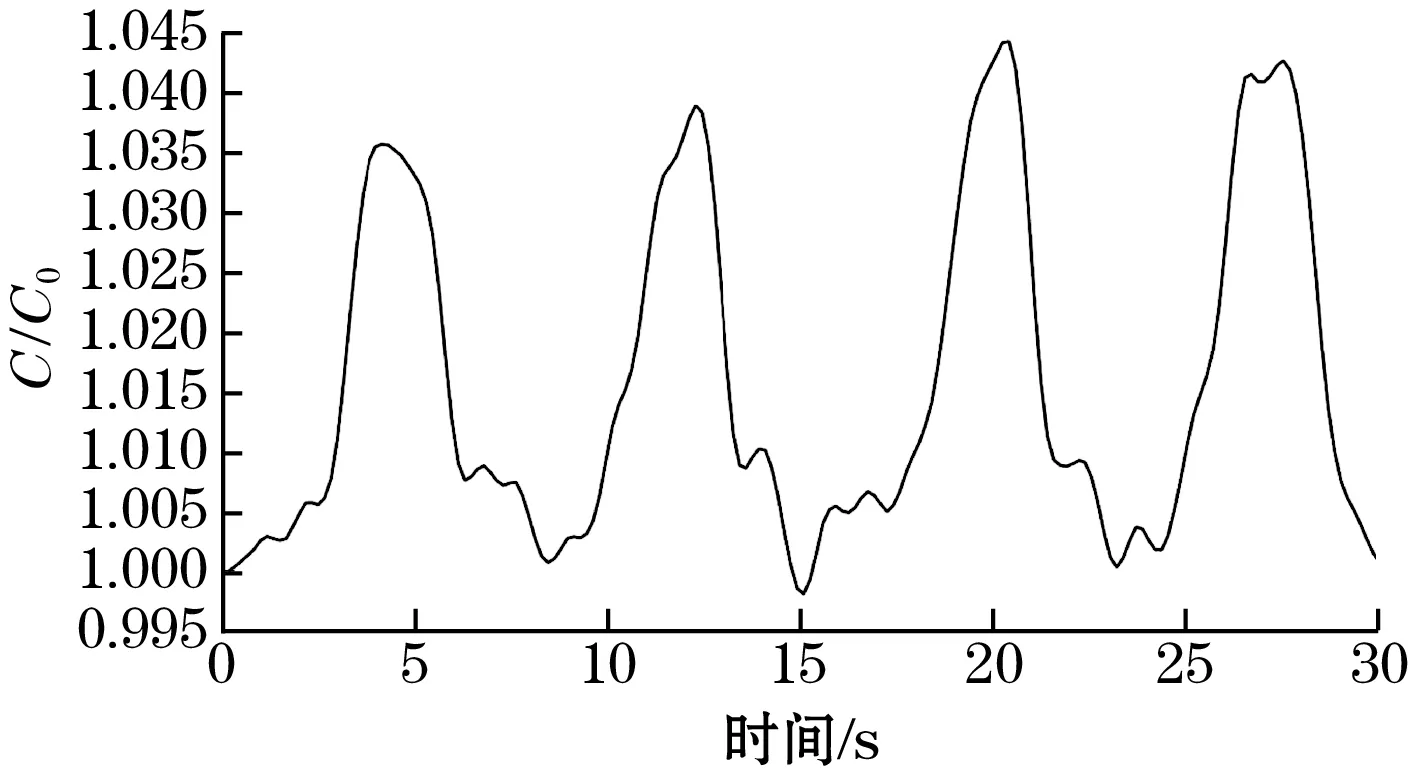
利用传感器检测喉结的运动,如图11(a)、图11(b)所示。在喉结运动前先将传感器贴于喉结位置,此时传感器是扩张的,受试者喝水时,喉结向上移动,传感器扩张程度减小,此时传感器电容值相对于初始值是减小的(C/C0<1),从图11(b)中可以清晰看到,每一次喝水,传感器的相对电容值都有明显的下降,随喉结回到原来位置,传感器的电容值也回到初始值。表明传感器对人体运动敏感,响应明显。

(a)弯曲肘关节

(b)弯曲肘关节时传感器响应情况

(c)弯曲并按压肘关节

(d)弯曲并按压肘关节时传感器响应情况图9 传感器在肘关节上的应用
3 结束语

(a)旋转手臂
(b)旋转手臂时传感器的响应情况图10 传感器对手臂旋转的应用

(a)喝水运动

(b)喝水时传感器的响应情况图11 传感器对喝水运动的应用
本文提出了一种新型、多功能和柔性的可同时识别拉伸和外部按压的传感器。该传感器是基于柔性材料制作而成的,具有稳定的拉伸性能,与皮肤适配性高。该传感器总体为垂直结构,从上至下由电阻模块和电容模块两部分组成。电阻模块主要检测来自外部的按压,电容模块识别拉伸扭转等应变。实验证明传感器可以在不同拉伸倍率(20%、40%、60%、80%、100%)、不同角度(30°、60°、90°)和12 000次循环拉伸下保持良好的性能,并用渐增的力按压传感器,传感器随力的增大电阻逐渐减小,表征传感器较长的延展性、稳定性、耐用性和高重复性。在弯曲和伸展关节、弯曲关节并伴随按压、扭转前臂和喉结上下运动这4种应用场景中,传感器能准确地识别和感知人体运动,证明了传感器的实用性和可行性。该项工作为应用于人体运动检测、医疗康复、机器人技术和人机交互的集高延展性与感知外部按压的人造皮肤提供了参考。
猜你喜欢
中华肩肘外科电子杂志(2020年1期)2020-12-20
小天使·一年级语数英综合(2020年5期)2020-12-16
中华肩肘外科电子杂志(2019年4期)2019-01-03
中成药(2017年4期)2017-05-17
中华肩肘外科电子杂志(2016年3期)2016-01-23
大连工业大学学报(2015年4期)2015-12-11
智能建筑电气技术(2015年5期)2015-12-10
核科学与工程(2015年3期)2015-09-26
天然产物研究与开发(2014年6期)2014-04-27
河南科技(2014年16期)2014-02-27
