基于压电主动控制技术对钻杆系统振动削弱的研究*
2021-11-29 03:44贾永龙
南方农机 2021年22期
贾永龙
(山西机电职业技术学院,山西 长治 046011)
在深孔加工过程中钻杆难免会出现涡动,钻杆的涡动直接影响孔加工的精度以及刀具的磨损程度,解决涡动带来的加工质量问题,最好的方法就是控制钻杆的涡动,尤其是解决涡动引起的钻杆失稳。被动、半主动和主动控制法是控制理论中比较常见的方法,这3种方法解决振动情况的侧重点不同。BTA深孔钻杆系统的振动属于柔性转子振动控制范畴,相比半主动控制,主动控制技术更能实现最优控制力[1-2],在钻杆结构上采用压电主动控制方法控制振动,效果更好。课题组在BTA深孔钻杆系统中使用压电主动控制技术,对带来危害的钻杆振动起到减振甚至消除的作用,提高BTA钻的加工精度,对钻杆系统振动削弱的研究具有一定理论意义。
1 主动控制技术
主动控制技术可以抑制或者消除振动[3]。主动控制这种方法在实际操作中适应性较强,一般在实际操作中可以修改系统函数,达到对许多结构进行振动控制的目的。主动控制还具有预测数据的功能,由控制器对反馈结果进行计算,再由执行器对目标函数进行控制,最后达到了预定目标[1]。
主动控制结构原理流程图,如图1所示。主动控制操作过程是在目标结构实现、在控制器处理反馈信息进而指导执行器的过程来调整目标,最后让目标结构达到稳定。
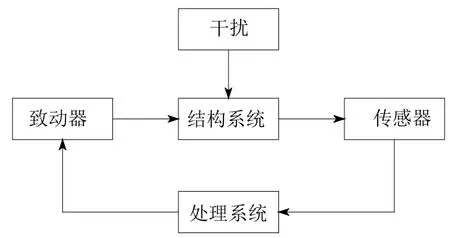
图1 主动控制结构原理
2 压电控制技术
压电控制技术是近年来在振动控制领域中新兴起的一种主动控制技术,它的兴起使得振动控制理论向前迈进了一步。压电陶瓷是应用比较广泛的压电材料,压电效应是力与信号的交换,压电陶瓷正是因为表面外力大小与产生电荷量成比例才广受欢迎。压电陶瓷片的特点有:
1)体积小,易与表面结构贴合,也易和内部结构附着;2)既可为传感器,也可为执行器,能耗少;3)响应快,可单独使用,也可多块联合使用。
3 压电结构理论
压电陶瓷片在工作时表现出来的特性是:当外力作用下,引起压电材料产生电荷量的过程是正压电效应;当受到电场作用下,引起压电材料发生应变的过程是逆压电效应。压电控制器中,在振动控制过程中压电传感器体现的是正压电效应,压电执行器体现的是逆压电效应。
3.1 压电传感
通过压电效应可得压电材料表面电荷量:

其中:E是电场强度,T是应力。也可以写成:

电场强度还可以表示为:

其中:Cp是电容量;Q是总电荷数;δ是压电材料厚度;A是电场电极面积。
由式(2)和式(3)可得出压电片的电压量:

通过式(4)可得,压电材料在控制中产生的电压量与自身应变成正比,从电压量的多少就可以知道压电材料应变量的大小;同时,也与压电材料的厚度、自身的弹性模量和电极面积有关。
3.2 压电致动
在电场作用下的压电材料,其应力方程为:

也是作用在钻杆上的应力,方向与之相反。
压电材料内场强Ez及应变值εx分别为:

其中:z是压电材料与钻杆轴线间的距离,ρ是钻杆曲率半径。
将场强Ez及应变值εx代入到式(5)中,得出钻杆所受的致动力矩为:

其中:U是电压量,b是压电材料宽度,d是电场中线与钻杆系统轴线之间的距离。通过相关变形理论可得出 ,Iy是钻杆系统惯性矩。所以,式(7)可变化为:

对于压电材料,可得出d31<0,通过式(8)可以得出:外电压量与压电力矩成正比,压电力矩与压电应变成正比。
4 BTA钻杆系统应用压电主动控制技术的可行性分析
钻杆涡动的产生是外界激励作用导致横向偏心振动,最终形成涡动,而这种涡动或者振动的不稳定性体现在钻杆的横向偏心位移。压电主动控制实现过程是压电传感器接收偏心位移振动信号,然后放大电信号,再将信号传递给执行器,利用压电片逆压电效应,使得执行器振动变形。
将压电主动控制技术应用于BTA深孔钻杆系统中控制钻杆振动位移,能达到削减甚至消除钻杆振动的目的。在此过程中,主动控制法与线性二次型最优控制法(LQR)相结合,配合上压电片的机械谐振,从而使钻杆系统趋于平稳。线性二次型最优控制方程可以表示钻杆振动模态方程,同时包含了二次型性能指标[4],该控制法计算简便,使得它被广泛利用。
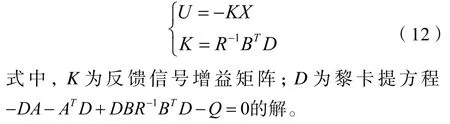
5 线性二次型最优(LQR)控制法
线性二次型最优控制法(LQR)是在约束系统的过程中求得目标期望值。当控制系统是线性函数,且是控制变量与状态变量的二次型积分时,该系统称为线性二次型[5]。闭环最优控制,就是在振动控制过程中及时接收状态变量线性函数的反馈并加以控制。
如果系统的线性状态为:

引入系统二次性能泛函-存留能量指标:

Q和R为控制输入矩阵,则:

式中,α、β、λ为权系数。
当Q的值需取得较大一些时,振动衰减会更快,其中:
6 基于BTA钻杆系统的压电控制结构
众所周知,深孔加工在机械加工中占有重要的地位,深孔加工质量更是重要的研究课题。为了提高孔的加工质量,对钻杆的偏转以及振动控制显得尤为重要。如图2所示,是在BTA钻杆上安装的控制系统,钻杆上装有压电陶瓷片,该压电陶瓷片具有传感器与执行器双重角色,这也就说明,该系统采用闭环反馈控制法。
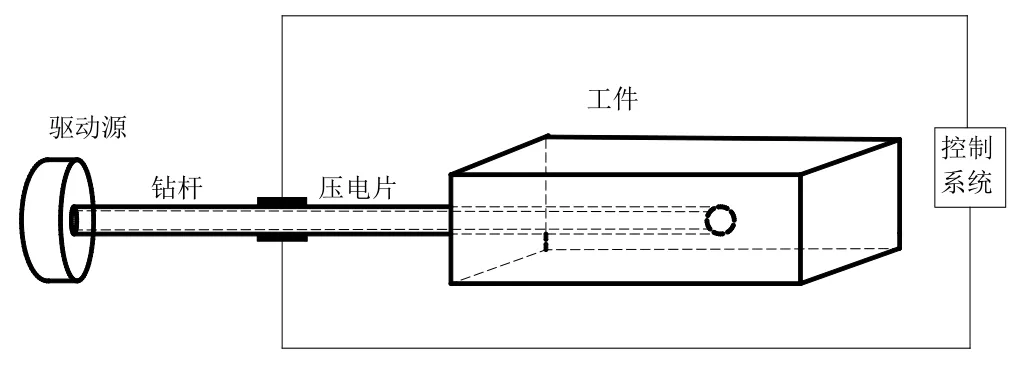
图2 BTA深孔钻杆的压电控制结构
整个系统由两部分组成,分别是智能控制系统与振动结构体。由信号采集卡、信号放大器、压电执行器、压电传感器和控制平台等共同组成了智能控制系统。振动结构体就是钻杆。
7 MATLAB仿真
利用LQR控制法对压电钻杆正则模态方程进行仿真分析。

MATLAB软件仿真控制过程,过程参数如下。
钻杆系统的参数:
长度L=2 000 mm,材料为45号钢,密度ρ=7.9×103kg/m3,弹性模量E=2.1×1011Pa;
钻杆的外径D=35 mm,内径d=24 mm。
压电陶瓷片参数:
厚度tb=5 mm,电容量Cp=5.8×10-12,弹性模量ED=6.3×1010Pa;
宽度b=12 mm,压电片电容率Ep=7.3×10-12,压电常数d31=-1.2×10-10C/N;
系统结构阻尼比例ζ=0.1,原始条件X(0)=(0.01,0)。
仿真编程得出压电控制位移轨迹图,如图3、图4和图5所示。
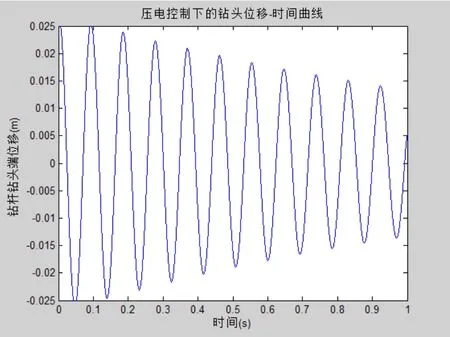
图3 未加控制的偏心振动
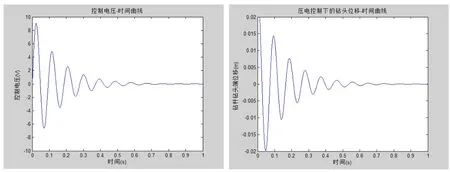
图4 施加控制(Q=[103,0;0,103])仿真结果
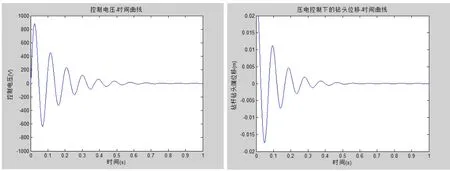
图5 施加控制(Q=[106,0;0,106])仿真结果
8 结论
通过图3、图4及图5的对比,可以得出:LQR模态控制的压电主动控制能够减小钻杆偏心振动位移,从而逐渐使BTA钻杆趋于平稳状态;同时,电压输出与钻杆振动大小成正比,即压电片应变与电量成正比。在压电控制作用下,钻杆振幅值随时间推移逐渐减小,接收的信号也会逐渐减弱,系统趋于平稳。
通过图4和图5的对比,还验证了在LQR模态控制法中增大权矩阵Q时,钻杆振动偏心位移也加快衰减。从数据上来看:Q=[103,0;0,103],R=0.001时,反馈增益系数K=[0.045 6,15.499 4],性能指标J=16.997 5;而Q=[106,0;0,106],R=0.001时,反馈增益系数K=[46,130 13],性能指标J=14 171.549 1。所以得出,Q较大时,振动衰减加快,同时能耗增加;Q较小时,振动衰减减缓,能耗也随之减少。
猜你喜欢
基层中医药(2022年5期)2022-10-24
东北大学学报(自然科学版)(2022年6期)2022-07-08
仪表技术与传感器(2022年4期)2022-05-31
煤矿安全(2022年5期)2022-05-23
陶瓷学报(2021年4期)2021-10-14
北京航空航天大学学报(2021年7期)2021-08-13
世界有色金属(2020年9期)2020-08-05
中西医结合心血管病电子杂志(2019年14期)2019-07-05
会计之友(2018年4期)2018-02-02
创新科技(2014年14期)2014-07-27