一种红外成像系统的畸变测试方法
2021-11-27 12:07郭哲民刘国平
红外技术 2021年11期
王 棪,郭哲民,刘国平
一种红外成像系统的畸变测试方法
王 棪,郭哲民,刘国平
(昆明物理研究所,云南 昆明 6550223)
红外成像系统图像畸变控制的良好与否对其能否在应用平台上发挥应有作用极为关键,因此在实验室内对红外成像系统的图像畸变进行测试、分析是极其必要的,本文提出了一种结合质心亚像素识别和精密测角的局部畸变测试方法,读取点靶在各个局部视场的质心变化并进一步计算即可得到畸变。采用该方法可以较好地解决点列质心法测试大视场系统操作性不高以及局部畸变法定位不够精确的问题,采用本方法对某型号红外成像系统进行了局部畸变测试,取得了与理论较为相符的测试结果,其相对畸变测试误差不超过0.02%,可以很好地满足红外成像系统的畸变测试需求,并对成像系统性能进行评估,有效反馈图像畸变对红外成像系统探测能力的影响。
畸变;红外成像系统;质心
0 引言
当前,红外成像系统作为辅助作战的重要武器装备,正被越来越多地应用到各类作战场景,其成像质量的优劣对能否实现精确打击至关重要。其中,图像畸变作为一个关键指标,它虽不直接影响图像清晰度,但会改变视场内目标的形状,使图像发生明显的拉伸或压缩,实战中,这类目标形状的改变将会干扰观察者对目标性质的判定。参考机载光电系统,视场可达20°~30°,当在极限观测距离上搜寻、定位目标时,目标形状的改变将影响对目标的识别概率,降低目标被探测和识别的可能性,换言之,可能导致部分使用者产生误判,进而给作战代入干扰,因此,如何对其在实验室进行精确检测极为关键。
在对红外成像系统的畸变进行检测时,常需要考察若干离散的局部视场区域的畸变情况,要分析不同视场范围的畸变大小,有两种可行的思路,第一种,是通过对大量离散点数据进行采集,拟合出适用于全视场范围的畸变函数,再将目标视场值代入其中,解算出离散的若干个局部畸变的大小,此方法可用于相机的畸变标定和修正[1-3]。第二种,则是分别对各个离散的局部视场进行数据采集,解算得到对应的局部视场区域畸变大小[4-5]。
对国内外常用的红外成像系统畸变检测技术进行调研发现,第一种思路有一定的应用,如美国的OPTIKOS公司,采用若干个点组成的阵列作为目标,将其置于准直仪焦面,为被测相机输出目标,通过分析局部视场区域内的点列的质心极矩[4],得到畸变大小。采用第一种思路的缺点在于,不同视场大小的被测红外系统,需要采用不同规格的点阵去匹配,效率上有欠缺,另外,当被测相机视场较大时,采用点阵往往只能覆盖相机的局部区域,若采用焦距更短的大视场平行光管,则其像质可能无法满足测试精度要求,实际中性能检测所选用的准直仪焦距至少是被测相机的3~5倍[4]。因此采用准直仪输出目标覆盖被测相机视场的方式往往不可行。参考可见光相机广角镜头的畸变检测方法,在有限距离的竖直平面,如光滑墙面上,制作大面积的棋盘目标[5-6],由于红外成像系统的调焦范围有限,最小清晰距离往往在数十米以上,采用这类方法将需要巨大的空间,客观条件较为苛刻,且红外成像系统的靶标是通过能量强弱来区分,同时,畸变测试在靶标的尺寸精度上要求较高,大面积的高精度热靶在加工上有难度。
根据第二种思路设计的检测方法更常见,国内外的一些测试系统研发机构,多采用国家军用标准中描述的方式,将十字靶标或矩形靶标作为观察目标,其大小约占整个视场的5%,将其中心与光学系统主点重合时的图形外径作为基准,将目标图像分别转动至各个局部视场的边缘,得到边缘区域目标外径并与中心基准进行比较,得到其在水平和垂直方向的失真量从而解算出畸变。第二种思路对短焦大视场的红外系统很适用,但随着红外成像技术的更新和迭代,一些长焦的红外成像系统正越来越多地被应用,对于此类红外成像系统,上述的常用方法存在不足:采用具有一定外径尺寸的目标将其置于不同局部视场区域下,由于目标本身占据了一定的视场范围,因此解算得到的数据并不能严格对应所考察的局部视场,视场定位的误差带来的影响将会被放大。
本文提出了一种基于质心识别的局部畸变测试方法,测试目标由均匀黑体辐射准直仪靶标输出,通过测试软件对小目标进行质心亚像素识别,结合精密转台对角度的高精度控制,从而实现畸变测试,对于不同的被测系统,只需在特别定制的同一靶标上,选取不同规格的圆孔即可,第一种思路在测试大视场时,用点列覆盖大视场不易操作,采用本方法,只需通过转动转台将所用靶标图像转动至所需测试的视场方位并读取目标质心即可,也无需考虑准直仪视场与被测系统视场的匹配问题。第二种思路在测试长焦小视场系统时,容易因所用靶标本身大小而影响到定位精度,采用本方法,只需将目标质心坐标与需测试的局部视场位置重合即可,靶标尺寸大小不影响局部视场的定位。测试结果的不确定度只依赖于测试设备的不确定度和质心识别不确定度。通过这种方式,即保有质心法的测试精度,也解决了局部畸变定位可能不准确的问题。
1 测试原理
从畸变的原理入手,建立局部视场的畸变检测模型,假设一个焦距为的红外成像系统对准直仪输出的无限远目标成像,目标张角为,经红外成像系统成像的理想像高为¢,实际像高为。实际像高可能大于或小于理想像高,因此,畸变的符号将随像高的增大或压缩而改变,将畸变进行泰勒展开[7],将只包含奇数项,且展开通常取3项:

实际检测中,普遍采用的是相对畸变的形式,则光学系统的相对畸变可表示为:

式(2)代入式(1),相对畸变的级数展开形式为:

另外,像高与焦距和视场角相关,其表达式为:
=×tan(4)
假设光学系统对一个9×9的点列目标成像,其图像如图1所示,建立坐标系,光学系统主点作为坐标原点,点列目标中心与主点重合,点列目标的各个圆孔的理想质心坐标已知,采用红外系统对点列成像,各个圆孔的实际质心坐标通过亚像素质心识别算法得到,由于光学系统畸变所造成的质心偏移即为对应局部区域的相对畸变,综合式(3)和式(4),建立形如式(5)的方程组,通过求解该方程组,即可得到相对畸变的级数表达式。利用该表达式可以对全视场畸变进行标定:
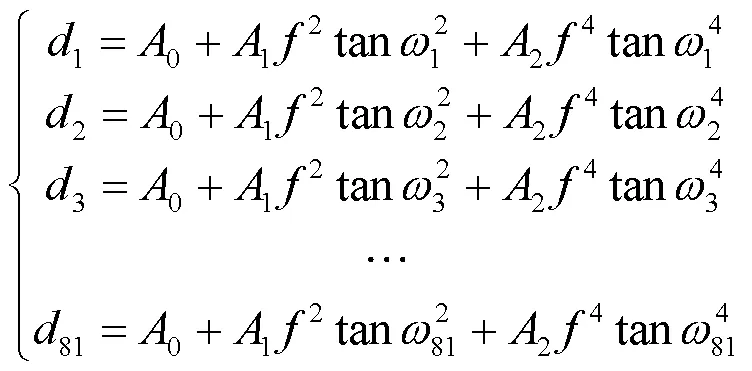
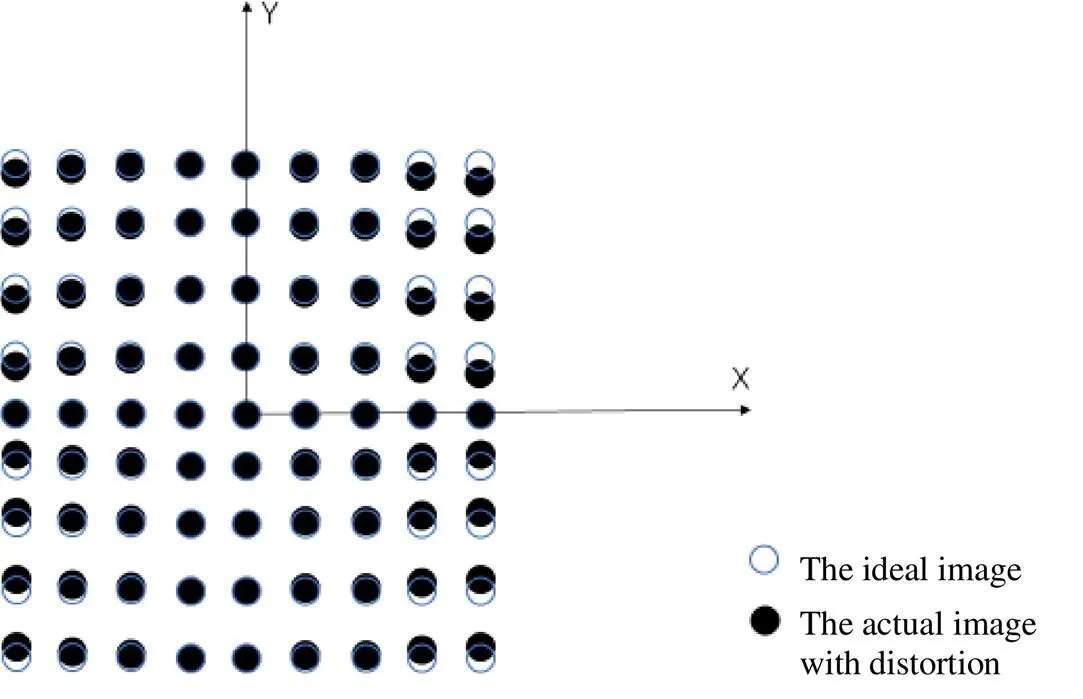
图1 畸变测试模型
通过上述模型,可以对全视场的畸变进行检测和标定,考虑局部视场的检测,如上文所述,全视场范围的点列靶对一些视场较大的被测相机很难做到匹配,并且我们只针对离散的部分区域进行分析,因此,无需建立分析连续数据的方程,从检测的角度,我们也无需校正图像畸变,因此,可对上述畸变模型进行简化:根据式(3),相对畸变的大小随视场增大而增大,对于同一局部视场区域,视场范围的4个边角位置畸变最大,在进行畸变检测时,同一局部视场,取最大值作为该局部视场的畸变值,依此作为判断被测件畸变是否满足设计要求的依据。
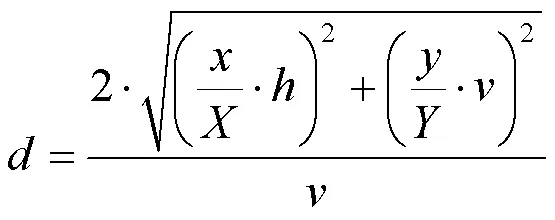
因此,可将局部视场畸变测试的模型简化:采用单一圆孔取代多个圆孔组成的点列作为被测相机的目标,如图2所示,建立坐标系,假设虚线矩形框标注的是待测量的局部视场区域的边界,假设需检测3个局部视场的相对畸变,则可将圆孔分别置于3个区域的共12个边界位置,边界位置的理想坐标根据被测相机的视场求得,利用软件读取圆孔在该位置的质心坐标,将实际质心坐标与理想坐标相减,得到质心偏移(,),系统图像的水平分辨率为,垂直分辨率为,系统水平视场为垂直视场为,根据式(6),得到相对畸变:
在对全部12个边角区域执行检测后,针对每个区域得到的4组数据,取其最大值作为该局部视场的畸变值。
采用这种办法,畸变解算的基础是质心偏移量,与质心分析的目标外径无直接关联,因此,采用这种方法,可以严格地对应局部视场区域,解算结果即为该局部视场的畸变值。
图2 局部视场测试模型
根据上述模型,设计了红外成像系统畸变检测光路,如图3所示,目标在均匀辐射源照射下,经过平面反射镜和离轴抛物镜放大后,以平行光输入被测相机。
图3 红外成像系统畸变测试光路
2 测试过程
根据图3所示的光路,配置相应组件,搭建了测试平台,如图4所示,测试平台包括目标模拟、角度控制和被测件3个模块,选择某红外成像系统对目标模拟模块提供的输出成像,并输入至高分辨率图像监视器和测试软件。
图4 测试平台
根据上文描述的测试方法,制定测试步骤并执行:1)调整转台,将圆孔目标像置于成像系统图像的左边缘,清零转台读数,再转置右边缘,读取转台数据作为相机视场数据;2)对各个局部视场的待测区域进行编号,如图5,根据视场数据计算各编号位置对应的方位和俯仰角度,以度分秒作为单位,数据见表1。3)调整转台使成像系统与平行光管光轴平行,打开成像系统的十字分化,将圆孔目标与其中心保持重合,清零转台;4)按照计算出的局部视场角度转动转台,并一一采集图像存储,目标的移动轨迹见图6;4)采集完图像后由软件解算出各个局部视场的质心数据并代入公式(7)解算得到相对畸变。
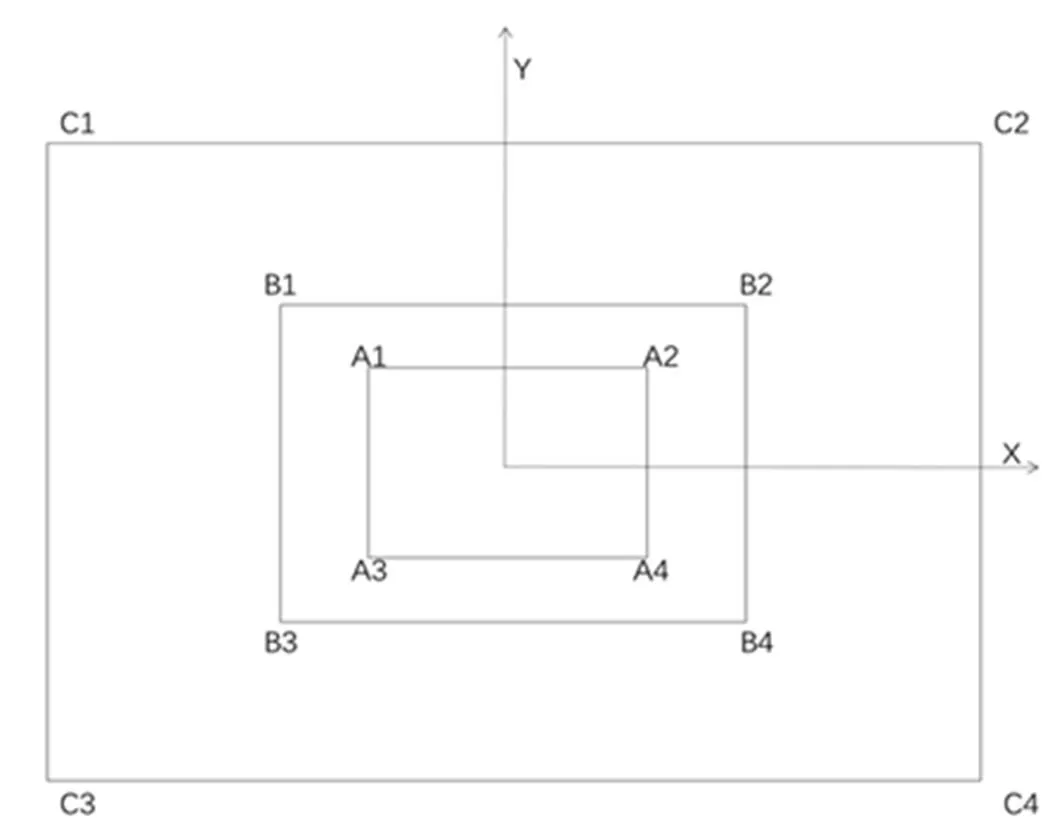
图5 局部视场编号

表1 局部视场对应角度
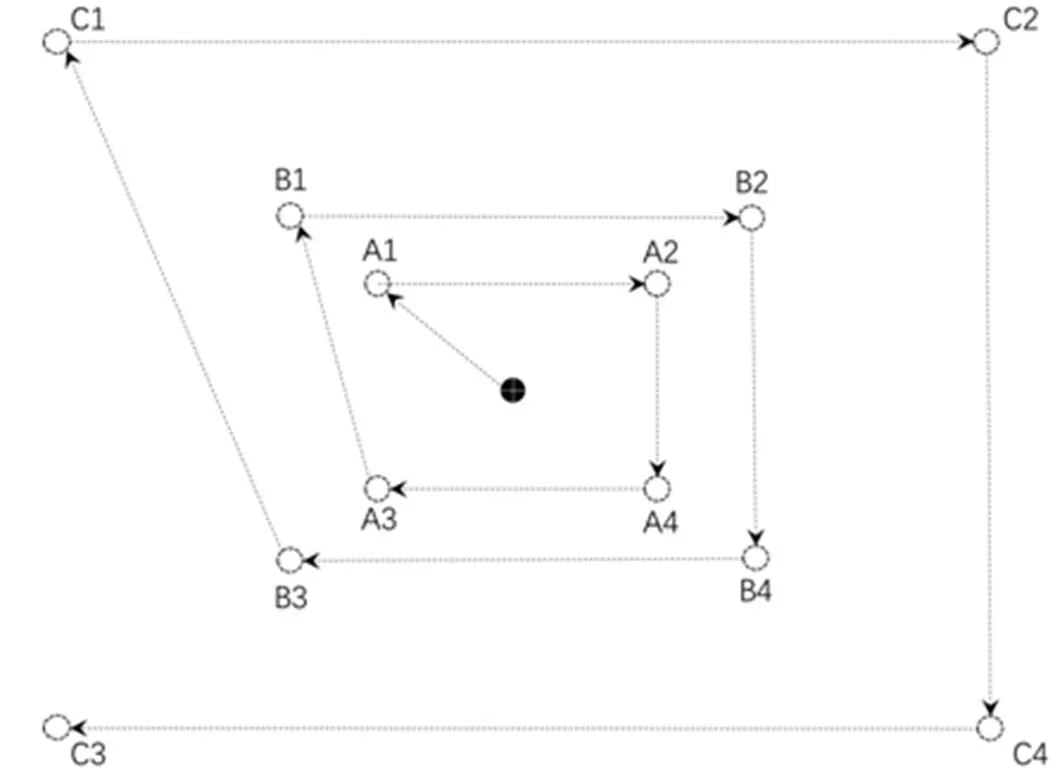
图6 目标移动轨迹
3 测试结果
依据上述测试流程,测试得到了该红外成像系统的畸变数值,为分析测试结果的合理性,利用软件对光学镜头畸变进行了诊断,取出3个局部视场的畸变最大值转换为百分比,拟合曲线,该曲线和实测结果对比如图7所示,可看到,两者的变化趋势是相吻合的,随着局部视场区域的增大,畸变值逐渐增大,利用本测试方法得到的畸变测试结果其规律符合畸变指标的规律。
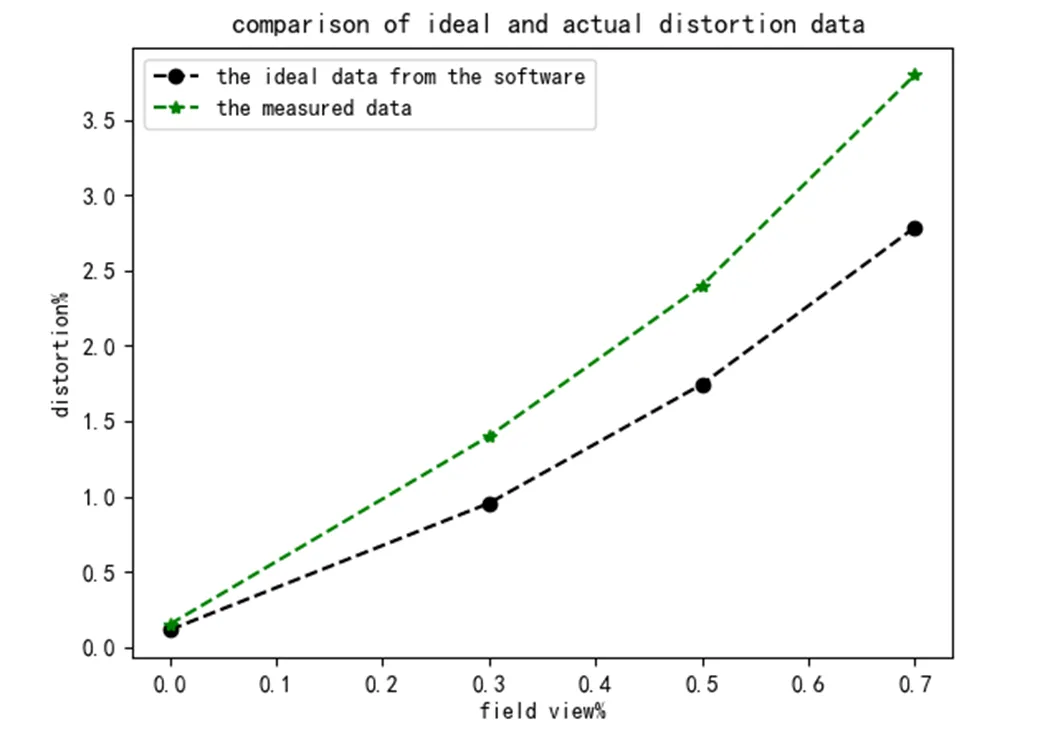
图7 仿真实测数据对比
为进一步评估畸变测试结果对红外成像系统成像质量判断所起到的作用,我们进行了一组性能测试,选取一定空间频率的四杆靶作为目标,在不同局部视场、不同畸变区域对其进行MRTD(minimum resolvable temperature difference)测试,通过测试验证:MRTD测试结果的变化趋势是否与畸变测试结果变化趋势相符,即畸变的测试结果是否能一定程度衡量系统对目标的探测能力;实际结果如图8所示,测量结果与畸变测试数据变化趋势吻合,畸变越大,MRTD测试结果越大,也即目标观测效果虽畸变的增大而下降,同时,畸变测试结果和MRTD测试值在3个局部视场均小于MRTD预估值和标准值,由此可知,畸变测试结果既符合目标观测的客观变化趋势,也能一定程度地反应系统的探测能力变化,畸变结果可用于评估图像失真是否影响到系统的探测能力,有效反馈系统图像畸变对探测能力的影响。
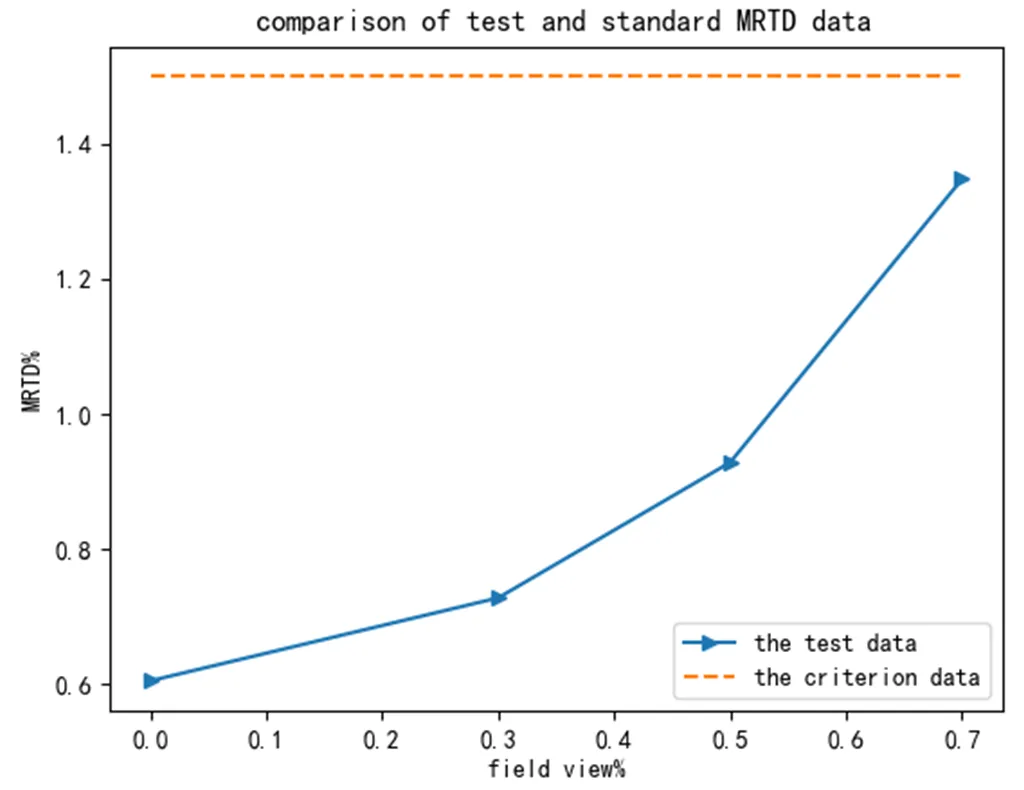
图8 MRTD测试值对比
4 误差分析
本方法的测试误差源主要包含:1)亚像素级质心识别误差;2)准直仪输出平行度误差;3)高精度转台角度误差。
准直仪平行度误差主要源于平行光管的焦面离焦和平行光管系统波像差,我们采用的准直仪光学系统,其镜头组件包含离轴抛物镜和平面反射镜,该系统的平行性误差主要来源有两类:1)抛物镜和平面镜镜面组件的面形误差;2)抛物面和其焦面的相对位置的失调误差。这两类误差的存在将会导致平行光管出射波前与理想平面波存在差异,从而输出光线存在角像差,这类误差将会对角度测量结果造成影响。此类偏差记为c,采用五棱镜法对平行光管进行标定,平行光管的平行度极限误差为=3²,包含因子=2,则平行光管的平行度误差为:
1=/=1.500²
高精度转台的误差主要源于转台转动的绝对角度与真值的偏离,此类偏离记为r,采用23面棱体和自准直管对高精度转台进行标定,高精度转台的测试半宽为1²,假设其服从均匀分布,其误差为:
亚像素级质心识别,误差主要源于噪声对算法处理的影响,噪声的不稳定性和随机性将会使图像目标的灰度值产生波动,目标灰度值矩阵作为质心解算的输入,其数值的变化将影响质心解算的结果,此类影响记为z。
根据图3所示的测试平台,执行分析质心识别误差分析的实际测试和图像采集,红外成像系统对平行光管无限远圆孔目标成像,保持被测红外成像系统与平行光管相对位置固定,将红外成像系统增益调至最高级,使噪声干扰最大化,连续采集10帧图像,采用质心亚像素识别算法对其进行识别并解算,其质心识别的向和向标准差均不超过0.02pixel,优于0.1个像素。
综合以上分析,在进行相对畸变检测时,平行光管的平行度和高精度转台精度将会影响视场测试精度和局部视场的定位精度,质心识别精度将会影响质心的识别,每次测试,两者均会造成影响,视场角的角度误差用式(8)计算,角度测试的误差为1.80²。
则相对畸变的误差为:

将上文数据代入式(9),得到各个局部视场的畸变测试误差,数据见表2,可看到,越接近中心视场对畸变要求越为严格,在30%视场,畸变测试的误差为0.014%,满足使用要求。
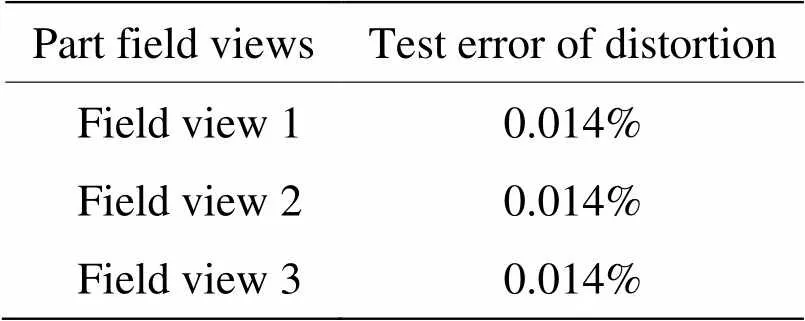
表2 畸变测试误差
5 结论
本文提出了一种局部视场相对畸变的测试方法,该方法提出了一种解算畸变的数学模型,结合该数学模型和实际测试条件,搭建了畸变检测系统,该系统能够结合精密角度测量和质心亚像素识别,较为可靠地输出被测红外成像系统的局部视场畸变,采用该方法,能够有效地规避采用点列目标、十字目标和方孔目标所出现的问题,其测量的误差不超过0.02%,满足常见红外成像系统的指标要求,能够较为可靠地在实验室对被测相机的畸变和进行检测和评估,并能作为系统探测能力评估的有力参考。
[1] 安德里安·凯勒, 加里·布拉德斯基. 学习OpenCV3[M]. 北京: 清华大学出版社, 2018.
Adrian Kaehler, Gary Bradski.3:C++[M]. Beijing: Qsinghua University Press, 2018.
[2] ZHANG Haofeng, ZHAO Chunxia, LIU Jianfeng. Straight line feature based image distortion correction[J]., 2007, 6(2): 83-86.
[3] 吴国栋, 韩冰, 何煦. 精密测角法的线阵CCD相机几何参数实验室标定方法[J]. 光学精密工程, 2007, 15(10): 1628-1631.
WU Guodong, HAN Bing, HE Xu. Calibration of geometric parameters of line array CCD camera based on exact measuring angle in lab[J]., 2007, 15(10): 1628-1631.
[4] Gerald Holst.[M]. Washington: SPIE Press, 1998.
[5] Fryer J G, Brown D C. Lens distortion for close-range photo- grammetry[J]., 1986, 52(1): 51-58.
[6] Brown D C. Close-range camera calibration[J]., 1971, 37(8): 855-866.
[7] 郁道银, 谈恒英. 工程光学[M]. 北京: 机械工业出版社, 2011.
YU Daoyin, TAN Hengying,[M]. Beijing: China Machine Press, 2011.
A Method for Testing Distortion of an Infrared Imaging System
WANG Yan,GUO Zhemin,LIU Guoping
(Kunming Institute of Physics, Kunming 650223, China)
It is necessary to test and analyze the distortion of an infrared imaging system in a laboratory because the ability of the system to play a role on the platform is dependent on the distortion control of an infrared imaging system. We have proposed a method based on a test of sub-pixel precision and precise angle measurement to calculate distortion using centroid difference data. It is laborious to test the distortion of an infrared system with a large field of view using a method which requires the computation of a large number of coordinates of points. Furthermore, the location of the field view could be a problem for the partial distortion method. By using the proposed method, the aforementioned problems can be addressed. We applied the method to evaluate a thermal system and the results were in agreement with those of the simulation software. The error control was less than 0.02%,which can meet the requirement. Moreover, the performance of the system was evaluated to analyze how the distortion affects the ability of the system.
distortion, infrared imaging system, centroid
TN215
A
1001-8891(2021)11-1061-05
2021-06-30;
2021-08-03.
王棪(1991-),男,工程师,现从事红外成像系统性能评估技术研究,E-mail:wywang_y@163.com
猜你喜欢
西南交通大学学报(2022年5期)2022-11-03
现代电子技术(2022年18期)2022-09-17
汽车实用技术(2022年14期)2022-07-30
金属热处理(2022年3期)2022-04-09
北京航空航天大学学报(2021年4期)2021-11-24
科学技术创新(2021年25期)2021-09-11
东南大学学报(自然科学版)(2020年1期)2020-01-16
中国惯性技术学报(2019年6期)2019-03-04
摄影之友(影像视觉)(2017年10期)2017-11-07