探地雷达偏移成像检测树干空洞
2021-11-26 10:32李光辉张艺楠
农业工程学报 2021年15期
李光辉,刘 敏,徐 汇,张艺楠
探地雷达偏移成像检测树干空洞
李光辉,刘 敏,徐 汇,张艺楠
(江南大学人工智能与计算机学院,无锡 214122)
果树容易受病虫害或自然因素的影响,使得树干内部产生腐烂和空洞,甚至危及果树寿命,影响果实的品质和果农的经济效益,故有必要对果树进行定期检查。探地雷达是一种有效的无损检测技术,能够在不破坏被测树干的情况下,检测出树干内部空洞的位置和大小。该研究提出了基于偏移成像的树干内部空洞图像重建方法,在各测量点利用对应的雷达回波信号重建树干内部的空洞情况。然而,对于不规则形状树干,难以确定探地雷达测量点在树干表面的位置,为此,提出了一种重建测量截面轮廓和定位测量点的方法。为了证明提出方案的有效性,以实际区域与重建区域的吻合度为评价指标,在仿真树干和真实树干样本上进行试验。结果表明,提出的轮廓重建方法对圆形树干轮廓重建准确率达99.45%,对不规则树干轮廓重建准确率达97%以上,满足普通树干形状的检测要求;偏移成像方法对圆形树干内部空洞重建准确率达95.41%,对复杂形状树干内部空洞重建准确率达87.54%,实现了对树干内部空洞的有效检测。研究结果有助于为果树的养护管理提供科学依据。
无损检测;探地雷达;树干空洞;偏移成像
0 引 言
果树的健康状况关系到水果的品质和产量,也决定了果农的经济效益。如何检测和诊断肉眼难以发现的果树树干内部缺陷及根系病虫害,一直是果树养护管理的难题。为了保护果树健康成长,必须定期对果树进行健康检查,及时对出现空洞或腐朽的果树进行养护管理。检测树干的方法很多,例如应力波[1-2]、微钻阻力[3-4]、探地雷达[5-7]、核磁共振[8-9]和电阻层析成像[10-11]等。微钻阻力和应力波检测都需要在树干表面钻孔,对树干存在轻微的破坏性,导致树干被病虫害侵袭的可能性增加,而核磁共振和电阻层析成像则因为成本较高,不适用于大规模林业测量。探地雷达的无损性、便携性、操作方便以及抗干扰能力强等优势,使其适用于检测树干空洞或树木根系。
由于树干表面形状不规则,雷达回波通常表现为无规律的复杂图案,导致回波数据解析困难,成像难度增加,进一步降低了雷达波数据的可视化程度和探测精度,为此国内外学者展开了广泛研究。Ježová等[12]通过分析探地雷达测量过程中使用不同形状的金属屏蔽罩对探地雷达数据的影响,研究了探地雷达识别树干内部缺陷的可行性。甘明旭等[13]使用探地雷达与TreeWin软件结合对轩辕庙内古侧柏的内部空洞情况进行研究,根据空洞与树干横截面的面积比判定树干的空洞程度,该方法对树干进行圆形假设,且要求树干的空洞位置不超过树干半径。肖夏阳等[5]使用激光雷达和点云数据构建了一个包含树干轮廓信息的三维坐标系统,并对探地雷达数据进行希尔伯特变换确定空洞位置到树干表面的深度。Giannakis等[6]采用弧长参数化方法将探地雷达的行进距离转换为坐标,使用粒子群优化算法拟合回波数据,并假设异常形状为圆形来定位异常的位置。
受上述研究启发,本文将探地雷达应用于果树内部空洞的无损检测。然而,目前基于探地雷达的树木无损检测方法主要是假设树干外形为圆形,对复杂形状树干则需要额外的昂贵设备,缺乏通用性,不适用于大规模的果园检测,且难以实现对包含远离树干中心空洞的树干结构的图像重建。针对这些问题,本文提出了新的果树横截面轮廓生成方法和基于偏移成像[14]的树干空洞图像重建方法,并进行仿真试验和针对真实树干的检测试验。
1 研究方法
本文的检测方案包括4个步骤,如图1所示,即树干轮廓坐标化、数据预处理、偏移成像,和偏移后处理。首先,获取树干待测路径的外部轮廓形状并构建坐标系统。随后,对原始雷达数据进行预处理,消除杂波并抑制振铃噪声[15]。前2个步骤没有相关性,可以改变次序。然后对预处理后的雷达数据执行偏移成像。最后,采用图像形态学方法改善偏移效果,突出空洞区域。
1.1 树干轮廓获取与坐标定位
探地雷达的测量方法一般有3种:共偏移法[6,16]、宽角法[17]和透射波法[18]。宽角法要求测量路径位于同一水平线上,而透射波法只能检测到介质相对测的直达波,均不适用于周向获取树干内部电磁回波。因此,本文使用共偏移法获取雷达数据,即发射天线和接收天线沿被测路径移动以固定步长向测量剖面发射并收集雷达信号。测量设备如图2所示,采用TreeRadar公司生产的树木雷达控制单元(Tree Radar Unit,TRU)系统进行测量,该系统由雷达天线、数据采集管理器和测量轮组成。雷达天线集成在雷达信号收发单元中,包括发射天线和接收天线,发射天线的中心频率为900 MHz,测量轮固定在雷达信号收发单元下方,直径为10 cm。在测量过程中雷达天线和测量轮紧贴树干表面,测量轮沿树干表面每转动1 cm,雷达天线就发射一次信号,同时数据采集器收集一组扫描数据,该数据是雷达信号发射后产生的回波,是一条随时间变化的波形曲线,通常离散为一个列向量。雷达在检测过程中收到的所有测量数据拼接在一起形成的二维矩阵就是原始数据,显示为雷达图像。其中,矩阵的列表示信号发射的次数,可用于判断行进距离;行表示每次信号发射收到的回波数据。由于该装置检测不规则表面时无法直接确定每次雷达信号发射的位置,本文通过拍照获取轮廓的数字图像信息,并采用Marching Squares[19]方法构建轮廓坐标系,并根据坐标计算出雷达信号发射的位置。
测量前首先获取树干轮廓截面的坐标信息,先绘制待测样本的测量路径并获取其周长(m),如图3a所示。然后使用轮廓规沿测量起点交叉测量,分段描绘树干的测量路径。将从轮廓规中提取的树干形状绘制在矩形图纸上,用1 200万像素的索尼相机固定在图纸上方拍摄,拍摄区域包含整个图纸。将拍得的图纸区域仿射变换为矩形,然后根据图纸的实际宽高比对仿射图像进行缩放,获得包含树干轮廓信息的图像。将图像转为矩阵,并使用Marching Squares方法获得轮廓的坐标序列,记为,其中轮廓坐标序列的第一个点为扫描路径的起点,位于矩阵的最上方(如图3b)。根据积分的概念,提取出的树干轮廓周长可以用微小曲线段的弧长ΔS之和来逼近:
其中是周长积分曲线,是曲线段的数量,表示构成轮廓的坐标序列点数,P表示轮廓坐标序列的第个点的坐标。
实际树干周长和提取出的树干周长的比值等于真实轮廓坐标与提取出的轮廓坐标的缩放比例,则树干轮廓上点的真实坐标P可表示为
根据公式(1)计算出轮廓上所有点到扫描起点的距离。标记所有最接近测量步长整数倍的点,记为测量点。
1.2 数据预处理
由于树干中电磁波的传播/散射[20]的影响,回波包含很多杂波和噪声。因此,在执行偏移成像之前,应先按如下步骤顺序对原始雷达数据进行预处理:
1)为了弥补电磁波传播过程中的电磁损耗,对原始雷达信号进行线性时变增益[21],提高雷达图像的清晰度。
其中amplification表示接收信号在某时刻的实际放大倍数;TRA表示发射波与接收波振幅的比值,dB;time表示时间,ns。
2)根据雷达发射波时延选择零点,其位置决定时窗大小,进而影响成像空洞区域的位置和大小。参考王泽鹏等[22]的方法,通过对反射直达波的识别和极性分析,确定回波信号的第一个波峰为零点位置,并删除零点之前的数据。
3)均值滤波[23]。滤波核大小为5×5,可以根据原始数据的数据量大小进行调整。滤波后的数据为二维矩阵∈ℝ×N,其中和分别代表矩阵的行和列。矩阵的每个元素减去对应行均值,得到背景去除后数据。
其中,是矩阵元素的下标。
4)奇异值分解[24]。该步骤是为了去除雷达信号在树干内部传播产生的振铃噪声和杂波。由于树干是一种复杂的各向异性介质,通常由5层结构组成:树皮、韧皮部、形成层、边材和心材[25],各层介电常数均不同。通常表现为树皮的介电常数较小,韧皮部的介电常数最大,并且从韧皮部到树干中心介电常数逐渐减小。通过奇异值分解,将背景去除后的矩阵分解为∈ℝ×M,∈ℝ×N和∈ℝ×N,即=T,其中和表示的特征向量构成的酉矩阵,是对角矩阵,主对角线元素是的特征值,按降序排列。大特征值通常与振铃噪声相关,而小特征值通常表示为杂波。通过将大特征值和小特征值设置为0来消除振铃噪声和杂波。
5)当探地雷达沿树干表面周向测量时,雷达图像显示回波为不规则图案,与传统平面测量的双曲线回波不同,不能使用神经网络等算法进行双曲线拟合[26-27]。因此回波提取至关重要,对奇异值分解之后的数据进行阈值处理,获取包含空洞回波的二值化图像。
1.3 偏移成像
本文应用偏移成像重建空洞的图像。接收器记录的回波数据是树干内部所有方向和相对侧的回波的叠加。偏移将电磁回波从未知位置移动到其实际空间坐标。在偏移过程中将空洞回波信号的接收位置作为电磁波传播的结束位置。
1.3.1 介电常数估计
对于电磁波成像,如果已知树干的电磁特性,则可以估计从空气/树皮界面反射的波场,并且彻底清除相应的杂波。大多数成像方法都需要了解树干的介电特性以便有效地对内部空洞进行定位,否则,可能导致成像结果聚焦在树干外部,或者成像区域大小与实际情况差异巨大。
探地雷达检测树干空洞的模拟试验如图4所示,当电磁波穿过介电常数不同的两种介质时,电磁波能量发生变化,一部分产生回波,另一些部分继续向前传播。图5为模拟试验的原始雷达数据,显示了从图4的模型中接收到的回波。为了补偿电磁波的双向传播时间,速度取实际速度v的一半。
式中0≈3×108m/s表示光速,为树干的介电常数,表示树干直径,m;是接收到回波的时间,ns。根据公式(6)和(7)可得:
由图5可知,当已知树干相对侧回波的到达时间与树干直径时,可以根据公式(8)近似地计算出树干内部的相对介电常数。
1.3.2 偏移方法实现
为了估算点源的能量,以每个测量点的坐标为中心,并以相应的回波数据为基,构造检测点的衍射面。通过叠加所有测量点的衍射面,获得偏移成像结果,该结果被视为在所有测量点都已偏移的值,该方法称为偏移成像。在均匀介质中,偏移成像可以通过以下公式计算:
其中是测量点数,P代表测量点的坐标,E是测量信号的能量,代表在给定测量点构造衍射面,()表示每条回波信号传播距离与时间的关系。

为树干内部电磁波传播速度的一半,m/s,通过公式(6)计算,是接收电磁波的时间步长,ns,为测量点回波在时间轴离散化后的时间采样点数。
对偏移后的图像进行形态学处理,消除偏移产生的伪影,提高图像质量。
1.4 结果准确率判别
本文使用余弦相似度系数[28]来评价空洞重建图像与真实图像之间的接近程度,余弦相似度通常用于目标检测领域判断2个区域之间的相似度,其计算公式如下:
其中表示真实空洞区域集合,表示重建的空洞区域集合,集合中的元素均为空洞区域像素点的坐标。其中||表示集合中元素的个数,表示准确率(%)。不难看出,当实际空洞区域与重建出的空洞区域位置或面积相差很大时,2个集合的交集会很小,导致准确率低。
2 试验验证
为了验证本文树干空洞检测方案的有效性,首先进行仿真试验,然后利用真实原木进行试验。雷达天线的中心频率为900 MHz,按顺时针方向测量,利用TreeWin软件分析雷达回波数据,产生断层图像。
TreeWin软件的工作流程如下:1)确定零点位置。2)输入树干半径并选择时窗,时窗底部不得低于半径,时窗顶部不得高于零点。3)根据软件设定的振幅阈值(默认为39),将时窗区域内大于振幅阈值的信号标记为异常(如图6a所示的线条3)。4)使用基于极坐标的雷达信号处理方法[13],将雷达数据重建为树干横截面图像(如图6b所示)。
2.1 仿真树干检测
在本节中,根据真实活立木各层介电常数的变化特性[25],设计了一个圆柱形仿真树干,如图7a所示。塑料桶用于模拟圆柱状树干的树皮,直径为0.528 m,在其中插入一根直径为0.13 m的白色圆柱形PVC管模拟内部空洞,塑料桶与PVC管之间的区域用湿沙填充,模拟树干的健康木质部。其中,塑料桶的介电常数约为2.3,湿沙的介电常数约为6,空洞的边缘会因为腐朽使介电常数比健康树干部分小,用介电常数约为3的PVC管模拟,空洞设计在偏离树干中心的位置,符合实际情况。
仿真的树干测量截面面积为2192.49 cm2,截面的空洞面积为133.34 cm2。图7b为TreeWin软件的重建结果,该软件采用极坐标方案重建树干截面空洞,树干半径位置到空洞回波的距离决定了空洞的大小,即空洞部分表现为从树干中心出发的扇形结构。图7c为本文方法的成像结果,雷达数据被重新处理,并且在阈值处理阶段根据二分法选择最优阈值为0.38。图7所示仿真树干的重建准确率如表1所示,实际截面面积和空洞面积可使用网格法计算,有效空洞面积是重建的空洞面积与真实截面空洞面积的交集。
从表1中可以看出,对于圆形的树干结构,本文方法与利用TreeWin软件对树干截面的重建误差均不超过0.5%,与真实树干的面积都非常接近。而对空洞部分的重建,本文方法的准确率达95.41%,能够准确还原出树干内部空洞的位置和大小。TreeWin软件的重建区域能够完全覆盖真实的空洞区域,但是由于其面积估计过大,使重建出的空洞与实际空洞的重合程度降低,误差较大。
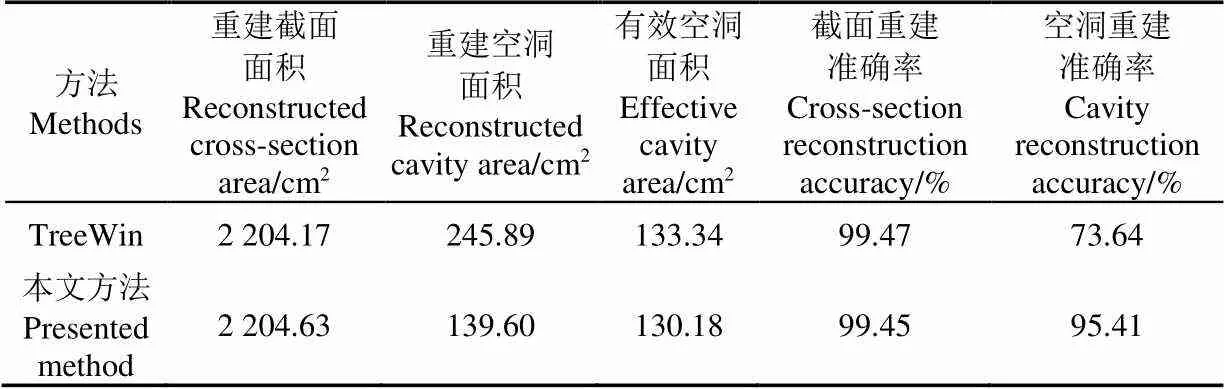
表1 仿真树干的检测结果
2.2 原木样本测量
本文选取3个树干轮廓和内部空洞形状各不相同的样本作为真实树干试验对象,如图8a所示。T1是一棵不规则的柯木样本(),内部空洞是一块复杂形状的连续区域,该样本纵向大小大致相同。T2是一棵纵向大小不同的雪松()样本,内部包含一块不规则空洞区域,其顶部为相对规则的圆形结构,底部为不规则的复杂形状,顶部与底部周长相差约为6 cm,测量截面为靠近样本顶部的横截面。T3是一棵纵向大小大致相同,且截面类似规则圆形的红松()样本,内部包含一个偏离树干中心的方形空洞区域和一条裂缝,所有真实树干样本的待测截面数据如表2所示。使用探地雷达采集上述树干截面的雷达回波数据,用本文提出的截面轮廓重建方法获取雷达测量截面信息。经TreeWin软件重建的树干内部空洞图像如图8b所示,本文方法重建的树干内部空洞结构如图8c所示。图8所示的树干样本的重建准确率如表3所示。
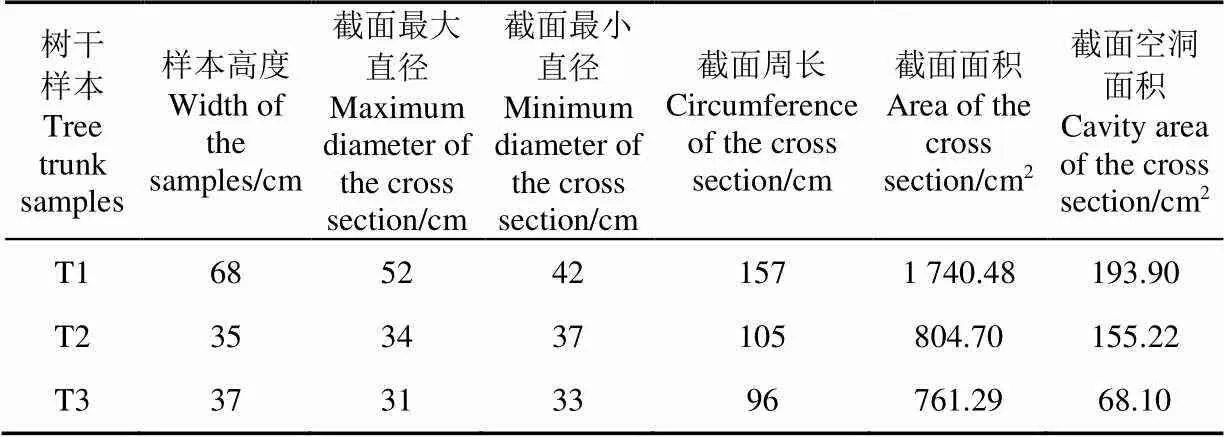
表2 真实树干的待测截面数据
从表3中可以看出,本文方法对树干空洞区域的重建准确率达76%以上,对树干轮廓的重建准确率达97%以上,能够成功生成接近真实情况的空洞图像。对任意形状的空洞和树干的检测,本文方法的准确率都要高于TreeWin软件。对T2所示纵向大小不同的树干,由于测量轮与雷达信号收发单元行进距离不同步,造成测量点定位出现误差,测量准确率相对偏低。对T3所示的原木样本,空洞和裂缝产生的回波叠加,对雷达回波分析造成了极大的干扰,TreeWin软件将树干内部的所有回波都判定为噪声信号,未能正确检测出树干内部的空洞,而本文方法则能够正确判断雷达回波中的空洞回波,且对空洞部分重建的准确率达到76.67%。因此,本文方法能够生成更接近实际情况的空洞图像。
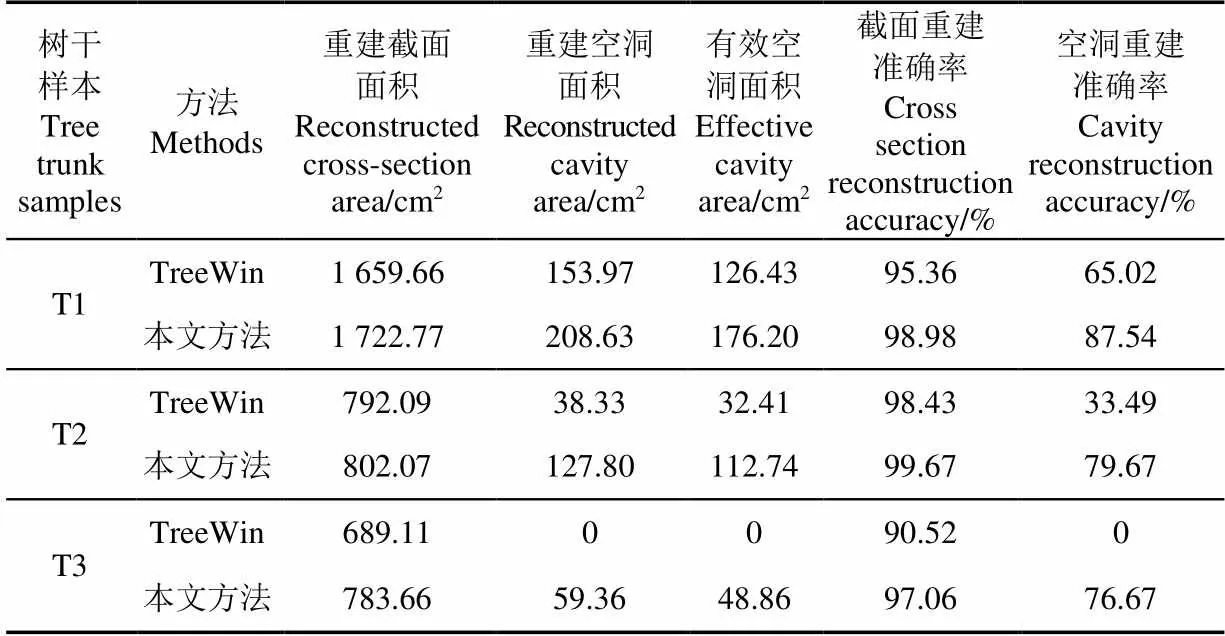
表3 真实树干的检测结果
3 结 论
1)针对肉眼难以发现的果树树干内部空洞,提出了基于探地雷达和偏移成像方法的检测技术,可实现对果树内部空洞准确的无损检测。该方法能根据各测量点的位置和该点的雷达回波信号构建测量点的衍射曲面,叠加各测量点的衍射曲面得到偏移成像结果。该方法避免了TreeWin软件从树干中心向外重构树干截面的结构,同时对于树干内部空洞的形状也不再局限于圆形的假设。
2)根据偏移成像的要求,需要确定探地雷达测量点在树干表面的相对位置,TreeWin软件默认树干是圆形结构,则探地雷达测量点位置可根据树干半径和测量步长进行计算,对复杂形状的树干,则无法用此方法将测量点坐标映射到树干表面。为此,本文提出了利用轮廓规和曲线积分结合的方式,构建被测截面轮廓和定位测量点坐标。
3)通过仿真试验和真实原木的试验结果表明,使用TreeWin软件基于极坐标的树干结构重建方式,对空洞的位置有局限性。当空洞位于树干一侧时,对探地雷达回波距离小于树干半径的部分,根据回波位置到树干中心位置的距离决定树干截面空洞的面积,而回波距离大于树干半径的部分,则会被映射到树干中心位置,导致成像结果成放射状扇形结构,与实际情况不符。而偏移成像技术则是通过树干表面的测量点向内映射空洞的位置,与树干中心无关,使复原的树干结构更接近真实情况。最终,在仿真试验中,本文方法的检测准确率达到了95.41%,比TreeWin软件提高了约22个百分点,在真实树干上的试验准确率也达到了87.54%,能够为果树空洞检测和养护管理提供指导。
[1] Dackermann U, Crews K, Kasal B, et al. In situ assessment of structural timber using stress-wave measurements[J]. Mater Struct, 2014, 47(5): 787-803.
[2] Liu L, Li G. Acoustic tomography based on hybrid wave propagation model for tree decay detection[J]. Computers & Electronics in Agriculture, 2018, 151: 276-285.
[3] Koizumi A, Ikeda K, Sawata K, et al. Nondestructive measurement of cross-sectional shape of a tree trunk[J]. Journal of Wood Science, 2011, 57(4): 276-281.
[4] Grzegorz S, Radosław W, Krzysztof L, et al. Age estimation of different tree species using a special kind of an electrically recording resistance drill[J]. Urban Forestry & Urban Greening, 2018, 34: 249-253.
[5] 肖夏阳,文剑,肖中亮,等. 基于雷达波的树木躯干内部缺陷探测识别[J]. 林业科学,2018,54(5):127-134.
Xiao Xiayang, Wen Jian, Xiao Zhongliang, et al. Detection and recognition of tree trunk internal structure based on radar[J]. Scientia Silvae Sinicae, 2018, 54(5): 127-134. (in Chinese with English abstract)
[6] Giannakis I, Tosti F, Lantini L, et al. A M. Health monitoring of tree trunks using ground penetrating radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(10): 8317-8326.
[7] Giannakis I, Tosti F, Lantini L, et al. Diagnosing emerging infectious diseases of trees using ground penetrating radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(2): 1146-1155.
[8] Lazarescu C, Watanabe K, Avramidis S. Density and moisture profile evolution during timber drying by CT scanning measurements[J]. Drying Technology, 2010, 28(4): 460-467.
[9] Javed M A, Kekkonen P M, Ahola S, et al. Magnetic resonance imaging study of water absorption in thermally modified pine wood[J]. Holzforschung, 2015, 69(7): 899-907.
[10] Lin C J, Yang T H. Detection of acoustic velocity and electrical resistance tomographies for evaluation of peripheral-inner wood demarcation in urban royal palms[J]. Urban Forestry & Urban Greening, 2015, 14(3): 583-589.
[11] Lindgren O, Seifert T, and Plessis A D. Moisture content measurements in wood using dual-energy CT scanning : A feasibility study[J]. Wood Material Science & Engineering, 2016, 11(5): 312-317.
[12] Ježová J, Mertens L, Lambot S. Ground-penetrating radar for observing tree trunks and other cylindrical objects[J]. Construction & Building Materials, 2016, 123: 214-225.
[13] 甘明旭,孙涛,康永祥,等. 应用探地雷达对黄帝陵古柏树干和粗根的研究[J]. 西北林学院学报,2016,31(4):182-187.
Gan Mingxu, Sun Tao, Kang Yongxiang, et al. Examination of the trunk cavity and thick root distribution of ancient platycladus orientalis in the tomb of yellow emperor by ground penetrating radar technology[J]. Journal of Northwest Forestry University, 2016, 31(4): 182-187. (in Chinese with English abstract)
[14] Solimene R, Catapano I, Gennarelli G, et al. SAR imaging algorithms and some unconventional applications: A unified mathematical overview[J]. IEEE Signal Processing Magazine, 2014, 31(4): 90-98.
[15] Kim J H, Cho S J, and Yi M J. Removal of ringing noise in GPR data by signal processing[J]. Geosciences Journal, 2007, 11(1): 75-81.
[16] 吴志远,杜文凤,聂俊丽,等. 基于探地雷达早期信号振幅包络值的黏性土壤含水率探测[J]. 农业工程学报,2019,35(22):115-121.
Wu Zhiyuan, Du Wenfeng, Nie Junli, et al. Detection of cohesive soil water content based on early signal amplitude envelope of ground penetrating radar[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(22): 115-121. (in Chinese with English abstract)
[17] Rashed M, Kawamura D, Nemoto H, et al. Ground penetrating radar investigations across the Uemachi fault, Osaka, Japan[J]. Journal of Applied Geophysics, 2003, 53(2/3): 63-75.
[18] Slob E C, Zhou F, Matteo A D, et al. Extracting subsurface information from GPR reflection and transmission data[J]. American Geophysical Union, 2011: https://ui.adsabs.harvard. edu/abs/2011AGUFMNSS41A.03S
[19] Lorensen W E, Cline H E. Marching cubes: A high resolution 3d surface construction algorithm[J]. Acm Siggraph Computer Graphics, 1987, 21: 163-169.
[20] 程琦,叶回春,董祥林,等. 采用探地雷达频谱分析的复垦土壤含水率反演[J]. 农业工程学报,2021,37(6):108-116.
Cheng Qi, Ye Huichun, Dong Xianglin, et al. Inversion of reclaimed soil moisture based on spectrum analysis of ground penetrating radar[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(6): 108-116. (in Chinese with English abstract)
[21] Giannakis I. Realistic Numerical Modelling of Ground Penetrating Radar for Landmine Detection[D]. Edinburgh: University of Edinburgh, 2016.
[22] 王泽鹏,张潇巍,薛芳秀,等. 探地雷达树木根系定位与直径估算[J]. 农业工程学报,2021,37(8):160-168.
Wang Zepeng, Zhang Xiaowei, Xue Fangxiu, et al. Estimating the location and diameter of tree roots using ground penetrating radar[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(8): 160-168. (in Chinese with English abstract)
[23] Ježová J and Lambot S. Influence of bark surface roughness on treetrunkradarinspection[J]. Ground Penetrating Radar, 2019, 2(1): 1-25.
[24] Bi W, Zhao Y, An C, et al. Clutter elimination and random-noise denoising of GPR signals using an SVD method based on the hankel matrix in the local frequency domain[J]. Sensors (Basel). 2018, 18(10): 3422.
[25] Yang J, Kamdem P, Keathley D E, at al. Seasonal changes in gene expression at the sapwood-heartwood transition zone of black locust (robinia pseudoacacia) revealed by cdna microarray analysis[J]. Tree Physiology, 2004, 24(4): 461-474.
[26] Dou Q, Wei L, Magee D R, et al. Real-time hyperbola recognition and fitting in GPR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(1): 51-62.
[27] 侯斐斐,施荣华,雷文太,等. 面向探地雷达B-scan图像的目标检测算法综述[J]. 电子与信息学报,2020,42(1):191-200.
Hou Feifei, Sou Ronghua, Lei Wentai, et al. A review of target detection algorithm for GPR B-scan processing[J]. Journal of Electronics and Information Technology, 2020, 42(1): 191-200. (in Chinese with English abstract)
[28] 李文博,王大轶,刘成瑞. 动态系统实际故障可诊断性的量化评价研究[J]. 自动化学报,2015,41(3):497-507.
Li Wenbo, Wang Dayi, Liu Chengrui. Quantitative evaluation of actual fault diagnosability for dynamic systems[J]. Acta Automatica Sinica, 2015, 41(3): 497-507. (in Chinese with English abstract)
Tree trunk cavity detection using ground-penetrating radar migration imaging
Li Guanghui, Liu Min, Xu Hui, Zhang Yinan
(,,214122,)
The decay and cavities inside the fruit trees are the principal factors, leading to shortening their lifespan and even death. Long-term exposure to natural erosion, pest invasion, or artificial damage can easily cause cavities in the trunk, which seriously threatens the health of fruit trees and results in negative impacts on the fruit quality. Therefore, fruit trees should be inspected periodically to detect internal defects, and then take measures to protect the fruit trees. Ground-penetrating radar (GPR) presents entirely nondestructive testing with the characteristics of portability and high efficiency, often suitable for the field of fruit tree evaluation. A circumferential movement can also be made to identify the cavity along the tree trunk surface. The transmission position of the radar signal can be adjusted through the moving distance to realize multiple fixed-point measurements. The receiving signals of all detecting points are utilized to analyze the cavities of the measurement area. However, the irregular trunk profile has already been a great challenge to position the GPR measurement points. In this study, a novel detection was proposed for the tree cavities to construct the trunk contour coordinate system, and then locate testing points. Image affine transform and marching squares were applied to extract the profile of the trunk. The integral was also used to estimate the relative position of measuring points on the surface of the trunk, according to the coordinates of the cross-sectional profile. Signal preprocessing was utilized to extract the effective signals from the cluttered raw radar data, further reducing the influence of noise signals on the imaging for nondestructive detection of GPR. In sequential preprocessing, the specific steps included the time-varying gain on the radar signal to enhance the clarity, the removal of the direct wave to correct the size of the time window, filtering the ringing noise using background removal and singular value decomposition, and labeling the signal position of the cavity using a threshold. The migration imaging was combined with the coordinates of measuring points and the effective radar signal after preprocessing to construct the radar wave diffraction surface during the image reconstruction of the internal cavity in the trunk. All the diffraction surfaces were then superimposed to highlight the cavity part, where the image morphology was characterized to eliminate the interference data. A field experiment was conducted on the circular simulation and various actual irregular tree trunk samples. The cosine similarity was used to evaluate the reconstruction data. The accuracy was estimated via the overlap between the reconstruction and the actual tree trunks. Experimental results show that the contour acquisition presented an error of less than 0.6% for the image of a circular tree trunk, while less than 3% for the irregular trunk. In the current measurement software TreeWin, the reconstruction error of circular tree trunk contour was about 0.6%, while the error of irregular tree trunk was about 9.5%. It indicated that the contour acquisition scheme was more suitable for the actual ancient tree section. In the detection of location and size of the cavity, a construction accuracy of 95.41% was achieved for the simulation, and 87.54% for the actual tree trunks, much higher than 73.64% and 65.02% obtained by the TreeWin software, respectively. Correspondingly, the irregular tree trunk contour posed a great influence on the measurement of GPR. The radar combined with the migration was highly consistent with the actual situation suitable for ancient tree protection.
nondestructive detection; ground penetrating radar; trunk cavity; migration imaging
李光辉,刘敏,徐汇,等. 探地雷达偏移成像检测树干空洞[J]. 农业工程学报,2021,37(15):154-160.doi:10.11975/j.issn.1002-6819.2021.15.019 http://www.tcsae.org
Li Guanghui, Liu Min, Xu Hui, et al. Tree trunk cavity detection using ground-penetrating radar migration imaging[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(15): 154-160. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.15.019 http://www.tcsae.org
2021-04-15
2021-07-08
江苏省农业科技自主创新资金项目(CX(19)3087);无锡市国际科技研发合作项目(CZE02H1706)
李光辉,博士,教授,博士生导师,研究方向为农业信息化和智能无损检测技术。Email:ghli@jiangnan.edu.cn
10.11975/j.issn.1002-6819.2021.15.019
S781.5
A
1002-6819(2021)-15-0154-07
猜你喜欢
房地产导刊(2022年10期)2022-10-18
航空学报(2022年5期)2022-07-04
今日农业(2021年11期)2021-11-27
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
学生天地(2020年18期)2020-08-25
科学导报·科学工程与电力(2019年5期)2019-10-20
雷达学报(2018年3期)2018-07-18
科技传播(2018年6期)2018-04-17
海峡科技与产业(2017年3期)2017-04-13