
基于MPC的自动驾驶车辆横向跟踪研究
2021-11-25 03:06:42姜龙龙吴鑫钊李培庆
科海故事博览 2021年31期
李 昊 姜龙龙 吴鑫钊 李培庆
(浙江科技学院,浙江杭州 310023)
1 前言
随着我国交通运输行业发展以及信息技术的迭代升级,汽车行业目前已经转入自动驾驶时代[1]。其中,自动驾驶横向控制是自动驾驶热点研究之一,主要研究目标就是设计横向控制策略确保车辆沿目标轨迹完成跟踪任务。
常用的自动驾驶横向跟踪算法有:PID 控制、神经网络模糊控制、前向增益性二次调节控制和MPC 控制。文献[2]提出了具有抗干扰性能的PID 控制,其具有直接反馈的线形特性。LI[3]则是对于轮毂电机进行了控制策略设计,使用势场法,通过可以使用的势场函数方程对参考角度进行最优求解,以此来在不同层级上对车辆进行控制,车辆在设计的控制策略的操控下,正常地完成了在规定的道路界限内的行驶工作,因此设定的跟踪轨迹的目标达成。文献[4]利用滑膜控制器来对自动驾驶车辆的控制需求进行了算法逻辑的搭建,设计观测器同时具备随着指数变化同期收敛变化的功能,控制过程所需要的特定变量可以在这一过程中进行测得,最大限度地保证了对于车辆控制的鲁棒性,不同于其他滑膜控制器的抖动问题,这一问题在设计中也得到了改善。由于MPC 控制可以处理控制目标的多维约束对象的干涉问题,也因此在无人驾驶的控制领域中有着广泛的应用。
2 车辆动力学模型
在验证所提出设计的基于MPC的控制器的实现性能,本文采用完成先验性假设的运动学模型,其中目标的前后轮的载荷等数据进行了线性的计算处理,空气动力学的影响同时进行了一定的忽略和先导性假设,控制系统中的状态量和输入也可以优先确定,由此最大程度地完成对于设计的控制策略来进行实验性检验。而对于常用的车辆控制原模型上,有两种模型可供选择。一类是将车辆认定为运动单点的运动学模型,在这一模型中车辆的纵向速度,横向速度和横摆角速度作为可选择的控制输入量,输入参量作为车辆中间状态量被看作假设控制输入,车辆的实际操作系统(直线行驶和转向系统)将会实现这些设定的输入参数。整个运动学的控制逻辑是分层级式的控制系统,上层控制逻辑是横向控制的轨迹跟踪,控制输入量则是作为低一层级的控制系统来实现底层的控制意图。另一种车辆模型则是考虑侧向动力学和轮胎动力学的动力学模型,这一模型的设计更为复杂,存在非线性系统的扰动和不同约束的干涉问题。动力学模型的控制输入则是车辆实际运行的机械系统的输出,这样的优点是方便更快搭建控制算法的逻辑架构,并且具有简洁的优势。本文采用的运动学模型将作为控制模型的建模对象,搭建应用于跟踪轨迹的横向控制器系统。
3 MPC 跟踪控制器设计
MPC 横向跟踪控制器原理如图1 所示,包括了MPC 控制流程和联合仿真平台的工作关系。
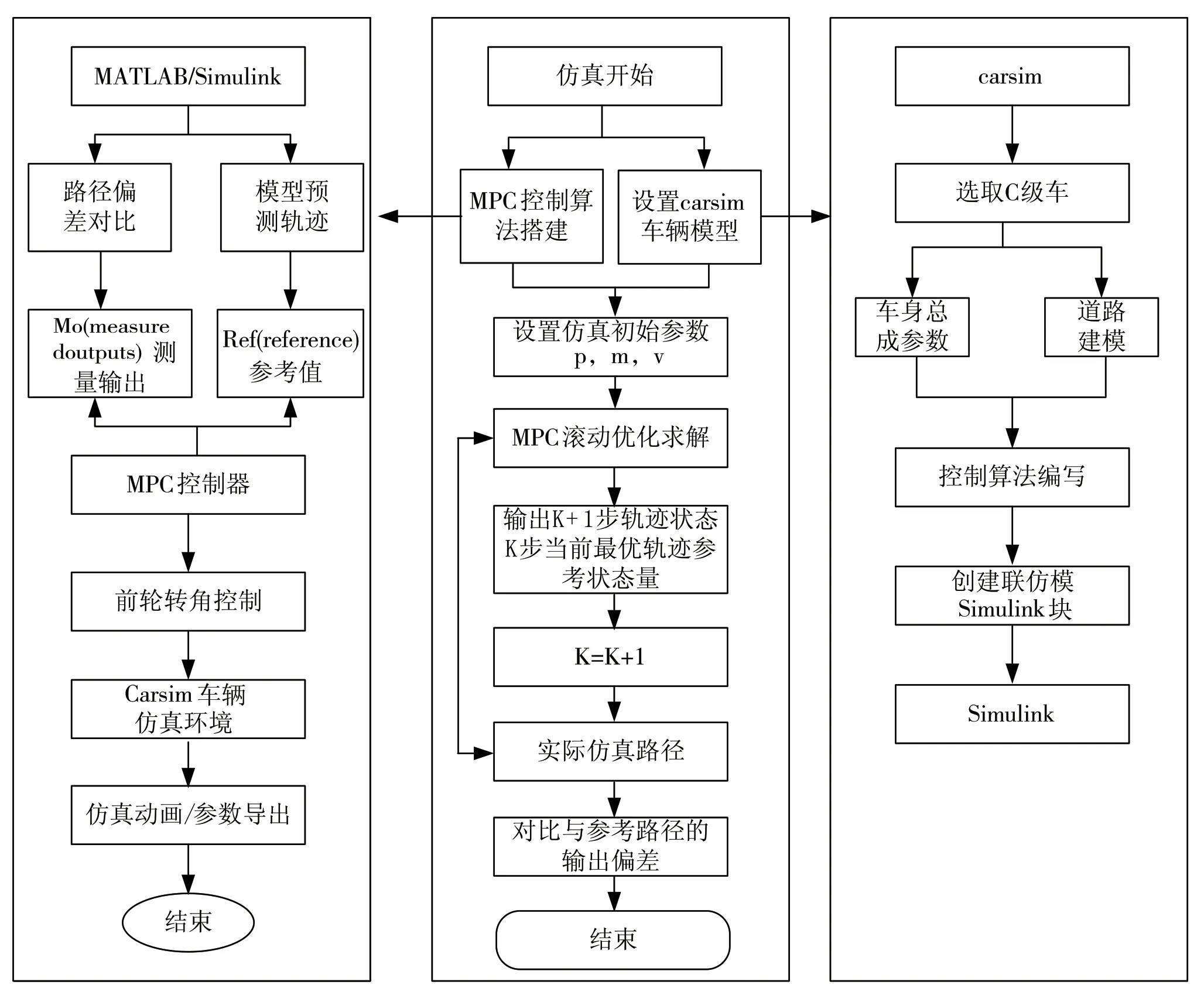
图1 MPC 控制原理
在一开始选择原型车,将该车的总成参数和模拟的行驶环境进行数理建模,建立相对应的动力学状态空间方程,并写入设计的控制内核思路。然后,我们将规划结合MPC控制律的优化函数并且同时考虑约束,之后再根据预测控制方法求解损失函数。因为研究主要关注在控制策略的搭建上,假设侧偏角和轮胎滑移率等数值为估算值,估算结果对于后续研究具有重要作用。
在矩阵运算上,设定偏差量为观测量输出,同一层级上将轨迹的参考值为输入,上述变量作为MPC 控制器的输入,至此车辆的前轮转角得到理想状态下输入设定。输入之后,MPC 对初始参数进行滚动优化求解,将k 定义为当前参考状态数值,k+1 步(未来的系统输出)的计算量作为实际值的结果来输出控制。每一个状态量和参数在任何一个采样时间点的数值不作为特定输出结果,而从一个时刻划分至未来某个时刻之间的区间时刻作为计算目标,同时随着时间点的推移这一计算目标也滚动优化,不断计算出新的最优结果是一直建立在实际系统工作的基础上并且实时刷新这一过程所出现的不确定性触发的优化计算流程,这种有限度的时间刻度上的滚动优化计算具有更有效的计算效率。
滚动优化过程中存在的非线性干扰等因素会使得计算结果和实际输出有所插入,这时增加额外的反馈校正,将实际仿真路径信息反馈输入至滚动优化过程,最大限度地校正模型失真现象或者录入信息引起的控制对理想状态量的误差偏移,因此预测控制算法也实现了内部闭环优化正向流程。
4 仿真结果
本文仿真轨迹选取双移线,仿真过程在Carsim/Simulink联合平台上完成。根据仿真结果,由于变化的车速使得算法控制下的车辆行驶轨迹与参考的对比轨迹之间出现一定的偏差,此误差数值处于稳定区间,直观地体现在仿真观测器上的实际行驶路径与参考路径的大致贴合,没有呈现较大的波动,总体上仍是较好地完成了轨迹跟踪控制任务。
5 结论
本文首先进行了车辆的数值建模,并设计了MPC 横向控制策略,最后在搭建的Carsim/Simulink 平台上对设计的控制器进行仿真验证。仿真结果表明,文章所设计的MPC控制器可以完成既定的车辆横向跟踪控制目标,并且对变化的速度变量具有优良的自适应性能,能在保证车辆稳定的前提下可靠的进行轨迹跟踪。
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
河北省科学院学报(2020年1期)2020-05-25 06:57:18
山东冶金(2019年3期)2019-07-10 00:54:04
制造技术与机床(2018年11期)2018-11-23 01:07:50
消费导刊(2018年10期)2018-08-20 02:57:02
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
通信电源技术(2016年1期)2016-04-16 04:57:26
