
磁悬浮平台直线同步电动机TS型模糊控制的研究*
2021-11-22 04:17张玉涵蓝益鹏
电机与控制应用 2021年10期
张玉涵, 蓝益鹏
(沈阳工业大学 电气工程学院,辽宁 沈阳 110870)
0 引 言
采用直线电动机进行驱动的数控机床具有结构简单、响应速度快等优点,但导轨与平台直接接触不可避免地存在摩擦[1],为消除直线电动机数控机床的非线性摩擦,提高数控机床的控制精度和运行稳定性,采用直线磁悬浮同步电动机(LMSSM)对数控机床运动平台进行驱动[2-3]。LMSSM产生的电磁推力驱动平台进行水平方向运动,竖直方向的磁悬浮力抵消平台重力,使平台稳定悬浮,实现了无摩擦进给[4],消除了摩擦扰动,提高了高精度数控机床伺服系统的性能[5-6]。
无摩擦机床磁悬浮平台使用的LMSSM系统是一个非线性系统,且具有强耦合性,故在复杂的工业生产条件下,往往无法得到精确的数学模型,LMSSM的数学模型只在理想状态下才能够表示真实的系统,这就要求,所使用的控制方法不能过于依赖数学模型。因为LMSSM进给系统与磁悬浮系统之间共用气隙磁场,所以存在电磁耦合现象,而且存在磁路饱和、磁滞和不同悬浮高度下参数时变问题。由于使用LMSSM直接对机床进行驱动,导致负载及多种不确定扰动直接作用于电动机,影响系统的控制性能。
为解决上述问题,需要选择一种合适的控制方法对LMSSM进行控制,发挥其直接驱动的优势,模糊控制由于不需要被控对象精确的数学模型,成为了控制LMSSM、使其发挥直接驱动优势的选择之一。但是,对于LMSSM系统这样的多维系统,通常需要定义多个语言变量,才能获得满意的控制效果,而这就需要大量模糊规则进行控制,而由于规则之间存在耦合作用,对某一条规则的修改会给整个模糊控制器带来难以控制的影响,增大了控制器调试难度,这就导致了传统的Mamdani型模糊控制器不能满足系统的控制需求。
本文设计了一种基于TS(Takagi-Sugeno)模型的模糊控制器。为了描述复杂的非线性系统,1985年,Takagi和Sugeno通过研究,提出了一种TS模糊模型[7]。TS模型的几何思想是用多个小线段表示一条曲线,换言之就是用多个线性系统的组合表示一个非线性系统,即以规则的形式把整体非线性系统表示成许多局部线性子系统,然后将这些局部线性子系统通过隶属函数连接起来。而TS模糊控制器就是根据这种思想设计的。其后件部分用函数的线性组合取代了传统的Mamdani型模糊控制器输出的语言变量,因此,基于TS模型的模糊控制器在控制效果相近的情况下,与传统模糊控制器相比,模糊规则数显著减少,设计难度也大大降低,对控制器的修改更加方便,更能适应复杂的控制要求。该控制器具有结构简单、运行稳定、抗扰能力强等特点,可以满足一般的控制需求。
1 LMSSM运行原理及数学模型
1.1 LMSSM的运行原理
磁悬浮进给平台结构如图1所示。LMSSM的定子以及辅助结构位于机床的磁悬浮平台,而负责进给的运动平台包括电动机动子、电涡流传感器等结构。在磁悬浮进给平台稳定工作时,平台与导轨之间存在一定空间,因而避免了摩擦的产生。
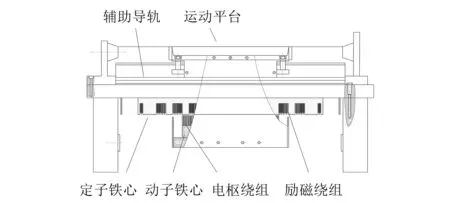
图1 磁悬浮平台结构图
本文所设计的控制器控制的是驱动机床的LMSSM,是在旋转电机的不断演变下形成的,为磁悬浮平台提供水平驱动力和悬浮力的,确保平台稳定运行[8]。向缠绕在电动机的定子上的励磁绕组中通入直流电后,会在气隙中产生磁场,称为励磁磁场。向磁悬浮电动机动子上的电枢绕组通入三相交流电后,会产生按正弦波形状改变并沿水平方向行进的行波磁场。行波磁场和励磁磁场相互作用产生作用力,推动进给平台,使其在水平方向运行。而在垂直方向上存在与重力大小相等、方向相反的麦克斯韦力,在其作用下,动子稳定悬浮。
1.2 LMSSM的数学模型
为了简化电动机的数学模型,假设如下条件[9-10]:
(1)忽略电动机的铁心饱和,电动机磁路为线性;
(2)忽略直线电动机的端部效应;
(3)忽略铁心的涡流与磁滞损耗;
(4)认为通入电动机电枢绕组的为三相对称正弦交流电;
(5)电动机磁极上不含阻尼。
根据以上假设,可以推导出LMSSM在d-q轴下的电压方程、磁链方程、推力及悬浮力方程和运动方程[11-12]。
电压方程:
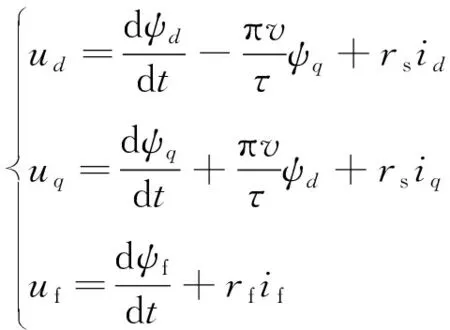
(1)
磁链方程:
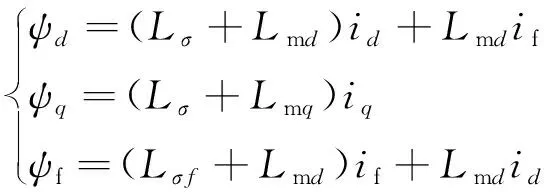
(2)
式中:ud、uq为电枢绕组d轴、q轴端电压分量;uf为励磁电压折算到定子的值;ψd、ψq为d轴、q轴的磁链;ψf磁极磁链分量;v为动子运动速度,且v=2fτ,f为电源频率;rs为电枢绕组电阻;rf为磁极励磁绕组折算到定子的电阻;id、iq为电枢绕组d轴、q轴电流分量;if为励磁电流折算到定子的值;Lσ为电枢绕组漏感;Lmd、Lmq为d轴和q轴的主电感。
推力方程:
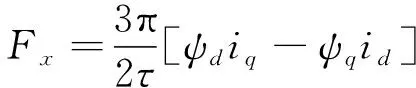
(3)
水平方向运动方程:

(4)
悬浮力方程:

(5)
垂直方向的运动方程:
(6)
采用id=0的控制,此时,d轴上只存在励磁绕组的励磁磁场。推力、悬浮力表达式简化为[13]

(7)

(8)

2 TS型模糊控制器的设计
2.1 控制系统构成
根据LMSSM的数学模型[14]并考虑模糊控制的特点及控制原理,系统的速度环采用基于TS模糊模型的模糊控制器,系统框图如图2所示。

图2 LMSSM双闭环控制系统框图
2.2 控制器的设计
一般的模糊控制器设计分为,隶属度函数的选择、模糊规则的设定以及选择适当的清晰化方法等。因为TS型模糊控制器的输出是函数的线性组合,所以不需要清晰化方法。本文所研究的模糊控制器是基于MATLAB软件的GUI图形界面进行设计的。
本文设计的TS型模糊控制器以误差e和误差的变化率ec为输入,分别表示电机实际速度与给定运行速度的差及该值的变化率,以q轴电流iq为输出。本文控制器所控制的LMSSM运行速度范围大约为0~1 m/s左右,通过调整因子将速度误差e和速度误差变化率ec转换到模糊论域[-3,3]上,为减少模糊规则数量,简化控制器,则取输入:N(负)、Z(零)、P(正)。则误差和误差的变化率模糊子集均取为{N、Z、P}。
根据经验,在e较大时,使用的隶属度函数应较陡,在e较小甚至趋近于零时,应使用平缓的、甚至斜率为零的隶属度函数,因此,本文设计的控制器在论域两端使用灵敏度较高的三角形隶属度函数,在趋近于零的位置使用梯形函数,以此获得较为优越的控制效果。输入量e、ec的隶属度函数在MATLAB界面下如图3所示。

图3 系统输入的隶属度函数
传统模糊控制器的规则,一般由前人的经验积累得到,数量一般为输入量语言变量的排列组合。但是,随着电动机种类的更新以及控制环境的不断变化,前人的经验有时不能适应控制需求,过多的规则数量也会造成控制器过于复杂,难以修改优化等问题。而TS型模糊控制器的规则不会过分依赖前人经验,可以根据推导或计算得出,更容易满足不同情况下的个性化控制需求,且减少了规则的数量,控制器更易于设计和优化。
令Ri表示模糊系统的第i条规则,TS模糊控制器模糊规则形式如下:



本文设计的控制器使用加权平均法求得系统输出,故系统的输出为
(9)
式中:ωi是第i条模糊规则的适用度,
建立TS模糊模型,需要大量的输入输出数据,进行分析辨识,找出系统局部线性的特点,将系统分段描述。本文需要使用TS模型描述控制器,因此先给出理想状态下输出量的响应曲线,然后根据控制的不同阶段输入不同语言变量时,如何使输出量尽量贴合理想状态下的输出响应曲线,确定每组输入量所对应的输出量。经过对大量数据的分析(先确定其局部线性特征,再使用最小二乘法等数学方法计算出描述这一线性特征的函数),得出如下4条模糊规则:
R1:ifeisN
thenu=e+1
R2:ifeisZandecisN
thenu=-0.1e+4ec+1.2
R3:ifeisZandecisP
thenu=0.9e+0.7ec+9
R4:ifeisPandecisP
thenu=0.2e+0.1ec+0.2
控制器的模糊控制规则如图4所示。
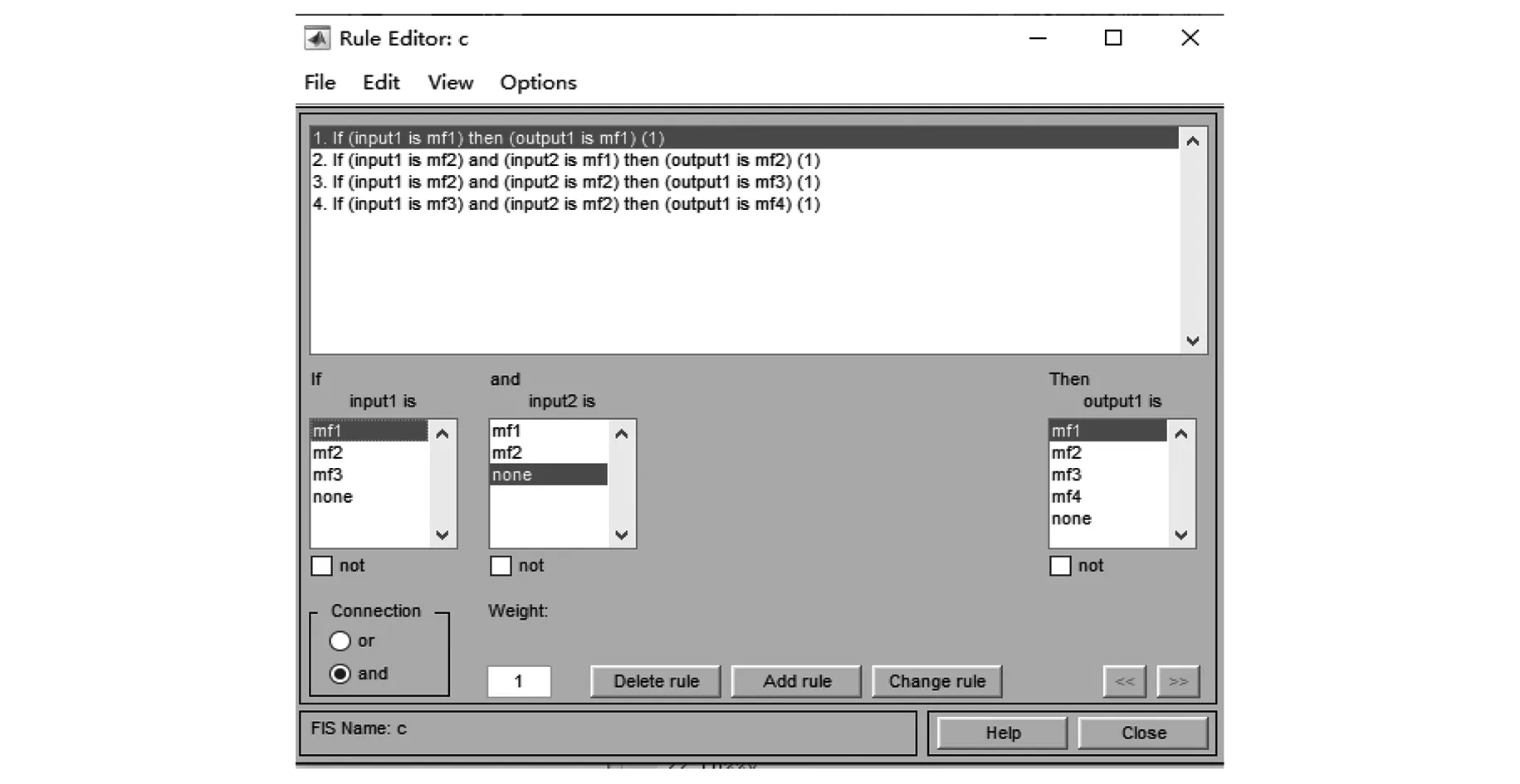
图4 控制器的模糊控制规则
基于MATLAB软件的模糊控制GUI界面,将控制规则和后件函数的系数分别输入rules和output界面,所设计的TS模糊控制器模糊推理图如图5所示,模糊推理三维图如图6所示。
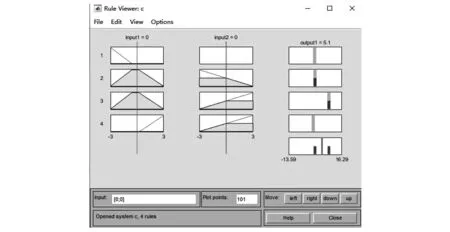
图5 控制器模糊推理过程图
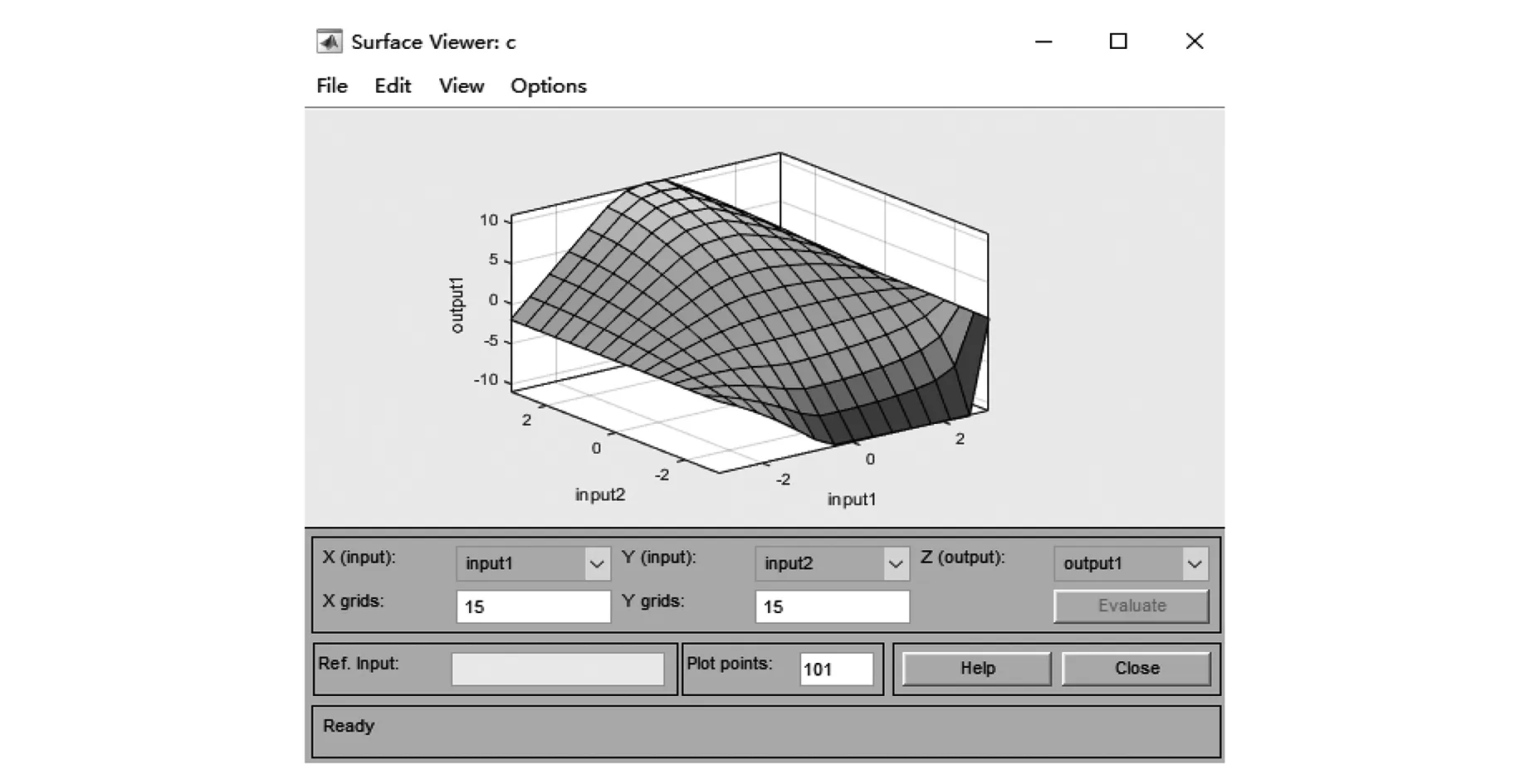
图6 模糊推理三维图
3 控制系统的仿真
3.1 控制系统仿真模型
根据图2所示的控制系统结构框图,搭建磁悬浮直线电动机TS模糊控制系统的Simulink仿真模型,将所设计的控制器搭载到工作空间中以便对电动机进行控制。仿真模型如图7所示。

图7 控制系统仿真模型图
仿真参数设置:dq轴电感Ld=Lq=0.018 74 H,d轴主电感Lmd=0.009 5 H,电阻Rs=1.2 Ω,极距τ=0.048 m,极对数p=3,电机动子及平台质量M=10 kg;励磁电流if=5 A。
3.2 仿真结果研究
将磁悬浮运动平台的水平进给速度,即LMSSM运行速度给定值设置为1 m/s,当0.1 s时,加100 N的负载,得到的推力、速度响应曲线,分别如图8、图9所示。
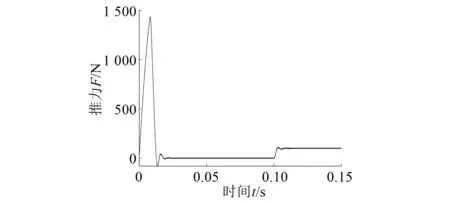
图8 推力响应曲线图

图9 速度响应曲线图
观察图8可知在起动阶段电动机的推力快速升高,驱动电动机进行加速运动,起始阶段如图9所示,直到达到稳态。空载阶段,平台无外力作用,故推力降为零。在0.1 s时,加100 N的负载,系统快速做出响应,推力升高为100 N以平衡负载。
从图9速度响应曲线可以看出,无论是空载情况下(0.06 s之前)还是负载情况下(0.06~0.10 s),电动机均能够正常稳定运行,仅在0.1 s加入负载时有不超过0.01 m/s的速度降落,且在0.005 s内恢复。可见该控制系统快速性好、抗扰能力较强,在面对突然施加的负载或扰动时,反应速度较快,可以胜任大多数情况下的控制任务。
使用传统的PI控制器代替速度环上的TS模糊控制器,将二者的控制效果进行比较,得到推力、速度响应曲线对比图分别如图10、图11所示。

图10 PI控制器与TS模糊控制器推力响应曲线对比图
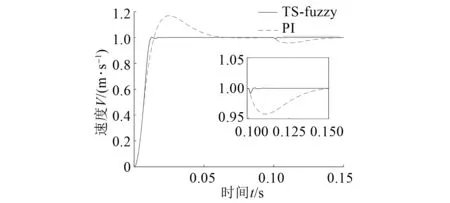
图11 PI控制器与TS模糊控制器速度响应曲线对比图
从速度响应曲线对比图中不难看出,在PI控制器的控制下,系统调节时间为0.058 s,超调量为17%,加负载时恢复时间为0.045 s,在TS模糊控制器的控制下,系统调节时间为0.012 s,几乎无超调,加负载时恢复时间为0.005 s,电动机响应速度更快,超调小,稳定性也较好。与PI控制器相比,TS模糊控制器控制性能优势明显。
同时作为模糊控制器,在相同条件下,TS模糊控制器的控制性能与传统的模糊控制器的控制性能相近,甚至优于后者,但是,本文设计的TS模糊控制器只需要4条模糊规则来实现控制,而在控制要求相同的情况下,传统的模糊控制器大都需要更多条规则来实现控制效果,而且其输出是语言变量,需要繁琐的清晰化过程,无形中增加了计算量。相比之下,本文设计的TS模糊控制器结构简单,占用CPU空间少,计算迅捷,显现出易于实现的优势。
4 结 语
(1) 研究LMSSM的运行原理,建立数学模型,并以此为依据,设计了LMSSM系统的TS模糊控制器。
(2) 通过MATLAB建立控制系统的仿真模型并进行仿真研究。在系统运行0.012 s后,电动机以给定速度1 m/s稳定运行,在0.1 s时施加100 N的负载,其恢复时间为0.005 s,然后运行速度恢复为给定速度1 m/s。仿真结果表明,该控制系统反应速度快,抗扰性强,控制效果好。
(3)使用PI控制器对电动机进行控制时,调节时间为0.058 s,才能以给定速度运行,施加负载后,需0.045 s后速度才能恢复。相比之下TS模糊控制器具有明显的性能优势,并且与传统模糊控制器相比,TS型模糊控制器使用了较少的模糊控制规则,结构更加简单,运行速度更快。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
河北电力技术(2021年2期)2021-07-29
小学科学(学生版)(2021年4期)2021-07-23
电子制作(2018年1期)2018-04-04
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
电测与仪表(2016年23期)2016-04-12
