无人机遥感技术在地质资源调查中的应用
2021-11-21 09:44江佳琳李柏权
世界有色金属 2021年15期
韩 飞,江佳琳,李柏权
(海南省地质综合勘察院,海南 海口 570206)
随着我国经济的高速发展,地质勘查方法也从传统的人工勘查转为智能化勘查。智能化技术的应用对工程项目的快速实施提供了极大帮助。开展地质资源调查,有助于解决工程项目施工区域相关问题。无人机通过从不同角度和不同时间空中观察和摄影,利用地貌形态、地物阴影、土壤覆盖情况和植被等种种标志,解释出地面或地下的某些地质特征。在有利条件下,某些地质信息可以通过对地面信息的干扰而显现出来。由于航空遥感勘查视野的扩大,和容易将地面上看起来毫无规律的地质情况,通过隐约显露的解译标志加以识别。特别是在地质勘查人员无法到达、自然条件恶劣、地貌复杂地区(如某些高山、高原地带),利用遥感影像解译方法进行调查时最快捷的方法。该方法在国内外的应用较为普遍,也取得了突出的成效。
1 无人机遥感特点
1.1 机动快速的响应能力
飞行系统升空准备时间短、操作简单、运输便利。可迅速到达测区附近设站,进行云下低空低速飞行作业。
1.2 高分辨率图像和高精度定位数据获取能力
挂载特定任务设备,可获取超高分辨率数字影像和定位数据、可进行复杂的姿态飞行和快速扫描地表信息,并进行应用分析以及与其他数据源的快速融合。
1.3 低廉的运营成本,便利的系统维护
系统的置建费用较低,运营成本、维护成本和操作手的成本远远低于载人机系统。
2 无人机作业方法
2.1 确定测区准确位置
根据项目要求要求,确定测区准确位置。
2.2 确定测区无人机作业性质
无人机作业性质主要分为:正射摄影和倾斜摄影。
2.2.1 正射摄影
正射影像数据获取:一般挂载单镜头,设角度为-90度(镜头正对地面),航线采用弓字型飞行。
2.2.2 倾斜摄影
倾斜影像数据获取:可挂载5拼倾斜镜头,设角度为-90度,航线采用弓字型飞行。
2.3 实地勘查
充分了解航摄区域的地形地貌、气候条件及人工设施等基本情况,确定无人机起降位置,一般要求地势平坦,周围无遮挡,保证无人机在作业时处于操作人员的视线内,再确定区域内最高点高程和高程变化较大的位置,为后续的航线规划提供依据。
2.4 航线规划
在现场踏勘、作业性质及摄区面积的基础上,制定详细的飞行方案。
根据航摄相机参数、航高、航摄重叠度和分辨率等要求设计航线。
2.5 飞行作业
进行场地试飞,检查无人机状态、校准指南针、调整相机曝光度等参数。准备完成后,按照预先的航线规划进行飞行作业,并时刻注意无人机飞行安全和电池电量,保证其安全返航。
2.6 无人机回收
作业完成,回收无人机,并获取航摄数据。
3 数据处理
根据无人机的作业性质,通过数据处理系统,将获取的无人机姿态信息(POS数据)及任务荷载的原始数据,经过POS数据和原始数据处理、格式转换以及预处理后,生成正射影像图和三维模型影像图。
3.1 正射影像
正射影像是指将中心投影的相片,经过纠正处理,在一定程度上限制了因地形起伏引起的投影误差和传感器等误差产生的像点位移的影像。正射影像作为一种测绘产品,同时具有光学精度、几何精度和影像特征,信息量大、直观真实、内容丰富。
正射影像处理采用软件可用Pix4Dmapper。Pix4Dmapper是一款专业的航空摄影测量软件,集全自动、快速、专业精度等多功能于一体。支持通过手动或者无人机捕获区域的不同图像,通过在软件中使用图像来获得精准的二维地图(正射影像图),并能够自动以不同的颜色显示地表不同部分的区域和效果(见图1)。

图1 某区域进行无人机航摄正射图
3.2 倾斜摄影
倾斜摄影技术是通过在同一飞行平台上搭载多台传感器,同时从垂直、倾斜等不同的角度采集影像,获取地面物体更为完整准确的信息。倾斜摄影可真实反映灾害体周边情况,相较正射影像,倾斜影像能提供更多角度去观察灾害体,通过影像后处理软件应用,可直接基于成果影像进行包括面积、角度、长度、高度、坡度、方位等的测量以及计算灾害体的体积。
倾斜影像处理采用软件可用ContextCapture(Smart3D)。ContextCapture能够以一组对静态建模主体从不同的角度拍摄的数码照片作为输入数据源,加入各种可选的额外辅助数据:传感器属性(焦距、传感器尺寸、主点、镜头失真)、照片的位置参数(如GPS)、照片姿态参数、控制点等。ContextCapture在处理数据过程中无需人工干预,可根据输入的数据的大小,自动进行空中三角测量计算,并输出高分辨率带有真实纹理的三维模型。所输出的三维模型能够准确、精细地复原出建模主体的真实色泽、几何形态及细节构成。
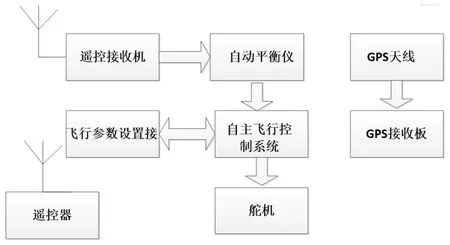
图2 倾斜摄影测量飞控组成图
4 成果应用
以不同时期的卫星影像数据与无人机航摄数据进行对比,可分析工程施工区域地形、地貌的变化情况,从而初步圈定复杂地形区的分布范围;再结合三维模型数据,从而初步撑握施工区域周边的地形地貌,为后期地质调查的钻孔布置及路线规划提供可靠的数据支撑。
5 结语
无人机遥感,是利用先进的无人驾驶技术、遥感传感器技术、遥测遥控技术、通信技术、GPS差分定位技术和遥感应用技术,实现自动化、基础测绘、土地利用调查等方面的应用,具有使用范围广、作业成本低、续航时间长、影像实时传输、图像分辨率高(厘米级别)、时效性好等优点,是卫星遥感与有人航空遥感的有力补充。
猜你喜欢
泉州师范学院学报(2021年6期)2022-01-07
矿产勘查(2021年3期)2021-07-20
宁波大学学报(人文科学版)(2021年4期)2021-07-07
小哥白尼(神奇星球)(2021年12期)2021-03-08
建材发展导向(2021年2期)2021-03-02
世界有色金属(2020年12期)2020-09-03
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
山东工业技术(2015年16期)2015-08-19