导弹定向定时航迹规划的改进PSO方法研究*
2021-11-19 12:19张利民李伟勋
航天控制 2021年4期
张利民 李 茜,2 李伟勋
1.中原工学院 电子信息学院, 郑州 451191
2.天津工业大学 机械工程学院,天津 300387
3.天津职业技术师范大学 理学院,天津 300222
0 引言
巡航导弹攻击方向和时间的协调对于提高突防概率有着特殊意义[1-3]。近几年,同时考虑攻击角度和时间的制导规律设计成为研究热点[4-6]。例如,2016年,廖沫等[7]分析了战术导弹协同作战模式和关键技术,重点针对导弹协同任务规划技术进行分析和研究,提出三级结构的导弹协同任务规划体系,并基于V图和A*算法进行了优化设计。2018年,李文等[8]基于李雅普诺夫方法推导了带指定攻击角度的时间控制导引律,使导弹按指定落角和落向以指定攻击时间打击目标,并借助Dubins最短路径,弹道轨迹边界分析了多约束条件下可指定攻击时间的取值范围。2019年,吴放等[9]为解决速度变化对导弹攻击时间和攻击角度的控制问题,提出一种基于成型理论和非奇异终端滑模理论的控制制导律,并证明了其Lyapunov稳定性。2020年,许志等[10]针对导弹速度不可控且变化规律未知条件下时间与角度控制的问题,提出了一种分段解析迭代的导弹速度预测及在线航程修正方法。
PSO(Particle Swarm Optimization)是一种基于群智能的全局优化方法。算法根据粒子在解空间中所处的情况进行搜索,没有复杂的寻优操作,易实现,且需要调节的参数少,收敛速度快,已广泛应用于各种优化问题[11-15]。
本文提出以Gauss伪谱法(Gauss pseudospectral method,GPM)思想基础,直接基于非线性导引运动学模型,将控制时域离散化为有限时间段,在考虑过程约束和禁飞区约束等约束条件下,将具有指定时间和终端入射角的反舰导弹最优航迹规划最优控制问题转化为一个PSO能求解的非线性规划问题,然后采用混沌PSO算法求解该问题,另外,本文还对传统过载目标函数进行了改进,降低了末段控制需求。
1 导弹-目标相对运动方程
导弹-目标的相对运动关系如图1所示。

图1 导弹-目标相对位置图
本文假定所攻击的目标静止,导弹速度为固定值V,选择坐标系XOY为地面坐标系的水平面。
图1中,(Xm,Ym)和γm表示导弹当前的位置和航向角,A表示其法相加速度, 始终与导弹速度V垂直来改变其方向,(Xt,Yt)和γt表示攻击的目标位置和航向角。根据图1,导弹-目标的质点模型课表示为[16]:
(1)
式中,(x,y)为导弹的位置,t为时间,γ为导弹航向角,A为导弹法向加速度,u为导弹法向归一化过载。
2 基于改进PSO的最优航迹规划
2.1 混沌PSO算法
PSO算法首先初始化为一群随机粒子,再迭代寻找其最优解。在迭代过程中,每一个粒子跟踪两个极值并更新自己,其中一个极值是粒子本身所找到的最优解,即个体极值;另一个是种群当前所寻到的最优解,即全局极值[11-13]。
但是PSO优化易陷入局部极值点,可以利用混沌搜索,跳出局部最优[17-18]。其基本思想是:采用混沌序列对粒子的速度和位置进行初始化,此方法不仅不改变粒子群的随机性,还能提高种群的多样性和粒子的遍历性;以当前群最优解为基础产生混沌序列,并用序列中的最优位置代替粒子群中的一个位置,产生局部最优解的邻域点,这样有助于惰性粒子逃离局部最优解。
在混沌搜索的算法中,为了保持种群的多样性,加强搜索的分散性,在保留一定数量最优微粒的同时,算法根据群体的最佳位置动态收缩搜索区域,并在搜索区域内随机产生微粒来代替性能较差的微粒。
2.2 最优控制问题转换
由于导弹的航迹优化属于最优控制问题,需将其转换为PSO能求解的非线性规划问题。借鉴GPM的思想,本文将最优控制的状态变量和控制变量在一系列Gauss点上离散,并以这些离散点为节点构造Lagrange插值多项式对其进行近似。通过对全局插值多项式求导,近似状态变量对时间的导数,将微分方程约束转换为一组代数约束,性能指标中的积分项由Gauss积分计算。经上述变换,可将最优控制问题转化为一系列具有代数约束的参数优化问题,即非线性规划问题(NLP)[19-20]。再利用混沌PSO算法对其进行求解。
2.3 连续最优控制问题的离散
考虑动力学方程

(2)
其中,x(t)∈Rn和u(t)∈Rm分别为状态量和控制量,函数f:Rn×Rm×R→Rn。传统的最优控制问题可以写为如下的标准形式:

(3)
满足边界等式约束
φ(x(t0),t0,x(tf),tf)=0
(4)
和过程不等式约束
C(x(t),u(t),t0,tf)≤0
(5)
其中,φ:Rn×R×Rn×R→Rq和C:Rn→Rr。
2.3.1 时域变换
采用GPM需要将航迹规划问题的时间区间[t0,tf]转换到[-1,1]:
(6)
2.3.2 全局插值多项式近似状态与控制变量
(7)
以及τ0=-1作为节点构成K+1阶Lagrange插值多项式,并以此为基函数构造状态变量的近似表达式,即:
(8)
其中,Lagrange插值基函数为
(9)
且使节点处的近似状态与实际状态相等,即Xi=X(τi)=x(τi)。同样,对于控制变量有
u(τk)=U(τk),(k=1,…,K)
(10)
即:
(11)
2.3.3 动力学微分方程约束
对式(8)求节点上微分,有
(12)
其中,微分矩阵可以离线确定,即:
(13)
从而动力学微分方程约束转换为代数约束:
(14)
其中,k= 1,…,K。
2.3.4 终端状态约束
状态变量的近似表达式未包括终端时刻节点,终端状态应满足动力学方程约束:

(15)
将式(11)离散化并用Gauss积分近似,可得:
X(τf)=X(τ0)+
(16)
其中,ωk为Gauss加权系数。
2.3.5 性能指标函数的近似
将传统的Bolza型性能指标函数中的积分项用Gauss积分来近似,得到近似性能指标函数[18]:
(17)
其中,Φ(X0,t0,Xf,tf).为边值条件,ωk同前。
根据上述数学变换,最优控制问题可转换为:求离散节点上的状态Xi,i=0,…,K和控制变量Uk,k= 1,…,K,以及初末时刻t0、tf(若未给定),使得性能指标(17)最小,并满足终端状态约束(16),以及原最优控制问题的边界条件(4)和过程约束(5)
从而将原最优控制问题转化成非线性规划问题(NLP),即:
minF(y),y∈RM
s.t.gj(y)≥0,j=1,2,…,p
hj(y)=0,j=1,2,…,l
(18)
其中,y为包含状态变量、控制变量和端点时间的设计变量,p为不等式约束的个数,l为等式约束的个数。
2.4 导弹飞行约束条件
1)初始边界条件约束
x(t0)=x0,y(t0)=y0,γ(t0)=γ0
(19)
2)终端条件约束
终端状态约束条件为:
x(tf)=xf,y(tf)=yf,γ(tf)=γf
(20)
3)控制约束
导弹的法向加速度要满足一定的约束为:
-Amax≤A≤Amax,Amax>0
(21)
4)战场禁飞区约束
战场禁飞区通常包括地形、敌方火力等,本文以圆盘表示为:
(x(t)-xq)2+(y(t)-yq)2>Rq,q=1,2,…,N
(22)
式中,(xq,yq)和Rq分别表示第q个禁飞区的中心和半径,N表示禁飞区个数。
2.5 目标最优函数的建立
按照多导弹协同作战的性质,导弹的攻击路径规划问题要满足的要求主要是使能量消耗最小。已发表的文献中一般所采用的过载最小性能指标为:
(23)
式中,u为式(1)中导弹法向归一化过载。为了保证末段轨迹的平直,降低控制需求,本文在(23)中引入一个时间加权函数f1(t),其值随时间增大而增大,以保证导弹末端平直:
(24)
其中,
(25)
2.6 约束处理
由于初始边界条件约束和终端条件约束,分别在轨迹的初始和末端起重要作用,因此也引入一个性能指标:
(26)
其中,
(27)
(28)
且,f2(t)和f3(t)为时变加权函数,f2(t)随着时间增大逐渐减小,即当轨迹离初始点越远其值越小,而f3(t)逐渐增大,即当轨迹离目标越近其值越大。
这里取
(29)
(30)
对于变量值域约束,混沌粒子群算法中有对其进行处理,所以此处可以忽略其性能指标函数的影响。
当有禁飞区约束时,针对每个禁飞区的约束,引入一个性能指标,

(31)
与之对应的距离有关的变加权函数fq(x,y),q=1,…,N,当前规划位置距离禁飞区越近其值越大,否则越小,这里取
(32)
这样,我们得到一个最终的指标函数
J=J1+J2+J3
(33)
2.7 协同攻击最优航迹规划问题
本文所从事的研究是针对地面固定目标情形开展的。对于面移动目标,可以采用导弹飞行中多次规划的滚动时域方法,也是我们后续的工作,超出了本文的研究范畴。
导弹协同攻击静止目标的最优航迹规划问题可描述为:在满足动力学微分方程约束(1)、边界条件 (19)和(20)、过程不等式约束(21)和(22)下,寻求最优控制量u(t),使性能指标(33)最小。
3 仿真校验
仿真1:无禁飞区仿真
假设飞行空域无禁飞区。利用CLSPSO对4枚导弹协同攻击原点处静止目标进行航迹优化。法向加速度最大值Amax=45m/s2,各参数设置如表1所示。仿真结果如图2~图4所示。
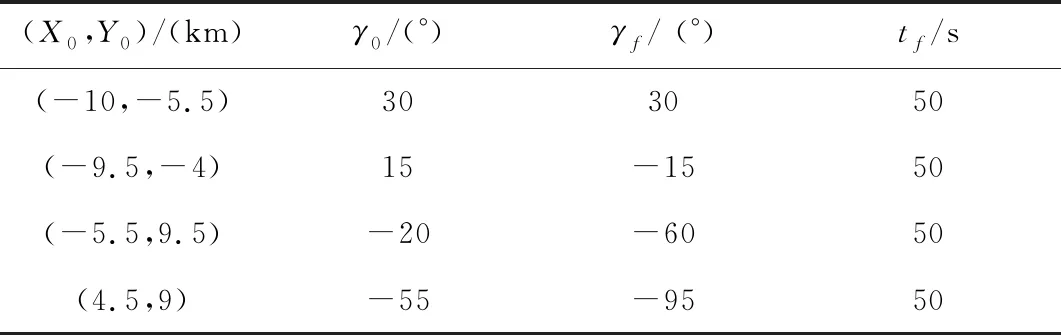
表1 仿真参数设置

图2 无禁飞区三导弹协同攻击航迹图

图3 无禁飞区三导弹协同攻击航向角曲线

图4 无禁飞区三导弹协同攻击法向加速度曲线
图2中可看出,4枚导弹在飞行初期各自按使过载最小的圆弧形轨迹飞行,以消耗所规定的飞行时间,当接近目标点时,均以设计好的入射角度飞向目标,其末端角度如图3所示,末端控制量如图4所示。可以看出导弹协同攻击的位置、角度与时间都精确满足要求,而且对应于性能指标J1的要求,末段弹道平直,并使导弹后期飞行轨迹平滑,对应于性能指标J2的要求,末段过载需求降低,并能精确地打击目标。另外,仿真条件为:Matlab2016,惠普ProOne 400,精度要求小于等于10-3m,GPM结点至少50个时,规划出一条最优航迹所需时间为0.809017s,如果采用C语言实现,效率可以提高2个数量级以上[14],优化时间短。
仿真2:有禁飞区仿真
假设仿真1中的航迹上有四个禁飞区(单位:m):
(1)(x(t)+ 7500)2+(y(t)+ 2000)2≤10002
(2)(x(t)+ 6000)2+(y(t)-6000)2≤8002
(3)(x(t)+ 2500)2+(y(t)-2500)2≤8002
(4)(x(t)+4000)2+(y(t)+6000)2≤4802
4个圆盘如图5中所示。引入这些约束作为过程约束,得到的仿真结果如图6~图8所示。

图5 禁飞区位置图

图6 导弹飞行航迹图

图7 航向角曲线

图8 法向加速度曲线
从图7可以看出,所规划的最优航迹在经过禁飞区时均有一个明显的航向角变化过程,由于约束和性能指标J3的存在,可成功地绕过禁飞区。而对于导弹3和导弹4,由于初始飞行方向和过载最大值的影响,其在绕过禁飞区前不能有较大的转弯,因此在寻找最优航迹时,最终找到一条离禁飞区比较近的最优飞行航迹;而对应于性能指标J1的要求,图6中4枚导弹的末段飞行弹道依然平直;对应于性能指标J2的要求,从图8可以看出末端过载需求仍然相对比较低。另外,虽然有禁飞区的约束影响,但飞行时间没有变化,而且同条件下的优化时间显示了这种算法的鲁棒性。
4 结论
根据GPM的基本原理,以导引非线性模型作为动力学方程,充分考虑了导弹的性能约束和战场环境约束,研究了基于混沌粒子群算法的多导弹指定入射角和时间条件下协同攻击目标的航迹优化设计。通过引进目标加权函数,保证了末段弹道的平直。仿真结果表明,本方法所设计出的航迹能安全地绕过禁飞区,末段弹道特性理想,优化时间短,在工程上具有一定的应用参考价值。
猜你喜欢
数学年刊A辑(中文版)(2021年1期)2021-06-09
石油沥青(2021年1期)2021-04-13
数学物理学报(2019年3期)2019-07-23
数学物理学报(2018年3期)2018-07-17
航空模型(2017年7期)2017-08-15
制冷技术(2016年4期)2016-08-21
测绘科学与工程(2016年4期)2016-04-17
通信电源技术(2016年4期)2016-04-04
电测与仪表(2014年16期)2014-04-22
空间控制技术与应用(2009年3期)2009-01-20