协方差交叉融合的惯性/卫星/雷达组合导航研究
2021-11-19 12:59梁禄扬
航天控制 2021年4期
周 峰 梁禄扬 林 平
北京航天自动控制研究所,北京 100854
0 引言
未来战争是体系与体系的对抗,机群协同编队作为一种新型的空中力量将越来越受重视[1],特别是有人驾驶飞机与无人机混合编队将成为一种新的作战编队样式。有人驾驶飞机和无人机的导航设备通常选用惯性/卫星组合导航系统,惯性导航系统具有自主、隐蔽及短航时高精度的特点,卫星导航系统具有定位精度高、误差不随时间积累的特点,将两者融合得到高精度高可靠的组合导航系统已广泛应用于各种飞机。然而,在复杂对抗的实战环境下,卫星导航信号容易被干扰,惯性导航定位误差随时间而积累,对单个飞机来讲,若没有其他辅助导航系统对其进行修正,定位误差的迅速增长使其无法长时间使用。通过相对测量手段,有效利用协同编队成员之间的相对定位信息,实现自身的导航定位,不但能够有效降低整个编队导航系统的成本,还能提高协同编队机群的抗干扰能力,提升实战化作战水平。
国内外已有学者开展了机群编队相对导航方面的研究,文献[2-3]基于编队成员相互测距的方法,实现机群组网定位,该文献通过建立简化的误差模型,以编队成员输出计算得到的距离与测量距离之差作为观测值,采用卡尔曼滤波对这些误差状态进行估计。该方法需要建立一个高维数的状态估计模型,并且由于各成员两两之间均有数据通信,因此计算量和机载数据链通信负荷较大。文献[4]在假设惯性导航误差近似呈零均值高斯分布条件下,提出了一种利用成像导引头对航路上任意未知地标被动观测的弹群定位误差协同修正方法保持导航精度。文献[5]给出了自主编队飞行计划(Autonomous Formation Flight Project,AFFP)中所采用的基于 INS/GPS 的相对导航系统,该系统主要应用于有人驾驶飞机和无人机的相对导航状态获取、相对导航和编队飞行控制技术,该方法自主性比较差,依赖于GPS信号的可用性,一旦GPS信号受到干扰,相对导航精度下降很快。
本文采用有人驾驶飞机(长机)和无人机(僚机)组成机群协同编队模式,长机装有高精度组合导航系统,僚机采用低成本惯导和卫星导航的组合导航系统,并装有雷达测角测距装置,在协同编队飞行过程中能够测量相对长机的角度和距离。假设僚机与长机机载数据链系统时间同步,则能够实时接收长机的导航定位信息。提出惯性/卫星/雷达协方差信息融合卡尔曼滤波器,通过雷达相对定位与惯性/卫星组合导航信息融合技术,解决了机群协同作战在卫星导航信号拒止条件下的导航精度下降问题,提升了实战条件下僚机的导航精度与可靠性,计算简便易于工程实现。
1 惯性/卫星组合导航卡尔曼滤波器
僚机导航系统采用基于伪距伪距率的紧组合导航方案,组合导航卡尔曼滤波器建模时用到的坐标系有北东地导航坐标系(用n表示)、惯性坐标系(用i表示)、地球坐标系(用e表示)和机体坐标系(用b表示)。
1.1 系统状态方程
卡尔曼滤波器的系统状态变量为
其中状态量分别为惯导系统3个方向的速度误差、姿态误差、加速度计常值误差和陀螺常值误差。卡尔曼滤波器位置、速度和姿态误差方程为
(1)

(2)
(3)

1.2 观测量
计算INS伪距、伪距率时,第i颗可见导航卫星对应INS伪距、伪距率可由以下公式计算:
(4)

(5)
式中:Xs,Ys,Zs,Vxs,Vys和Vzs分别表示第i颗可见导航卫星的位置、速度在导航坐标系中的分量。
将INS伪距、伪距率与接收机输出的伪距、伪距率作差作为量测量:
(6)
(7)
2 雷达相对定位卡尔曼滤波器
雷达相对定位卡尔曼滤波器建模时,使用僚机开始相对导航时刻长机质心为坐标原点的北东地地理坐标系,简称相对导航坐标系。
2.1 系统状态方程
选取长机与僚机相对位置分量和相对速度分量作为状态向量,
(8)
式中:xmt,ymt和zmt为长机在相对导航坐标系下的位置分量,Vxmt,Vymt和Vzmt为其速度分量;xdt,ydt和zdt为僚机在相对导航坐标系下的位置分量,Vxdt,Vydt和Vzdt为其速度分量。
状态方程为
(9)
(10)
(11)

2.2 观测量
僚机通过雷达对长机进行观测测量[6],可以获得僚机与长机的相对距离ρ,相对方位角qT,相对俯仰角qD。
(12)
由状态变量表示的量测变量函数关系为:
(13)
3 惯性/卫星/雷达协方差交叉航迹融合
3.1 协方差交叉航迹融合
将雷达相对定位的结果与惯性/卫星组合导航结果在北东地导航坐标系下采用协方差交叉航迹融合,惯性/卫星/雷达协方差交叉航迹融合包括2个滤波器,分别为前两章给出的GPS/INS紧组合卡尔曼滤波器和主动雷达定位卡尔曼滤波器。航迹融合的结构图如图1所示。

图1 惯性/卫星/雷达航迹融合框图
将雷达相对定位滤波器输出的结果转换到北东地导航坐标系下,设为x1,作为局部航迹1;选取惯性卫星紧组合滤波器输出的位置x2为局部航迹2,使用协方差交叉融合卡尔曼滤波器对局部航迹1和局部航迹2进行融合,该滤波器的实际精度高于每个局部滤波器的精度,应用协方差交叉融合方法的卡尔曼滤波器[7-8]为
(14)
(15)
(16)
其中权系数β∈[0,1],且满足
(17)
式中:P1和P2分别为局部航迹1和局部航迹2的误差协方差矩阵,tr为矩阵的迹,权系数β可根据式(17)用Fibinacci法[9]最优化问题搜索求解得到。这里β=0.31。
当卫星导航信号受到干扰,惯性/卫星组合导航输出的位置由于惯性器件的误差会产生漂移,定位误差变大,局部航迹1和局部航迹2随时间增加差异会变大,此时协方差交叉融合方法的卡尔曼滤波器输出的结果误差变大,需要重新设定权系数β。
3.2 航迹融合决策
惯性/卫星/雷达协方差交叉融合方法在使用时需考虑传感器测量信息的状态,本文提出使用决策逻辑判断来调整融合权系数。决策逻辑根据决策统计距离D和决策树进行航迹融合选择,决策树的结构如图2所示。门限T是根据两条局部航迹相距的最大允许程度确定的,若统计距离D小于门限T,就意味着两个局部传感器所给出的两条航迹非常接近,采用最优协方差交叉融合算法生成航迹;如果统计距离D大于门限T,就需要优化协方差交叉融合算法参数,从而生成系统航迹。
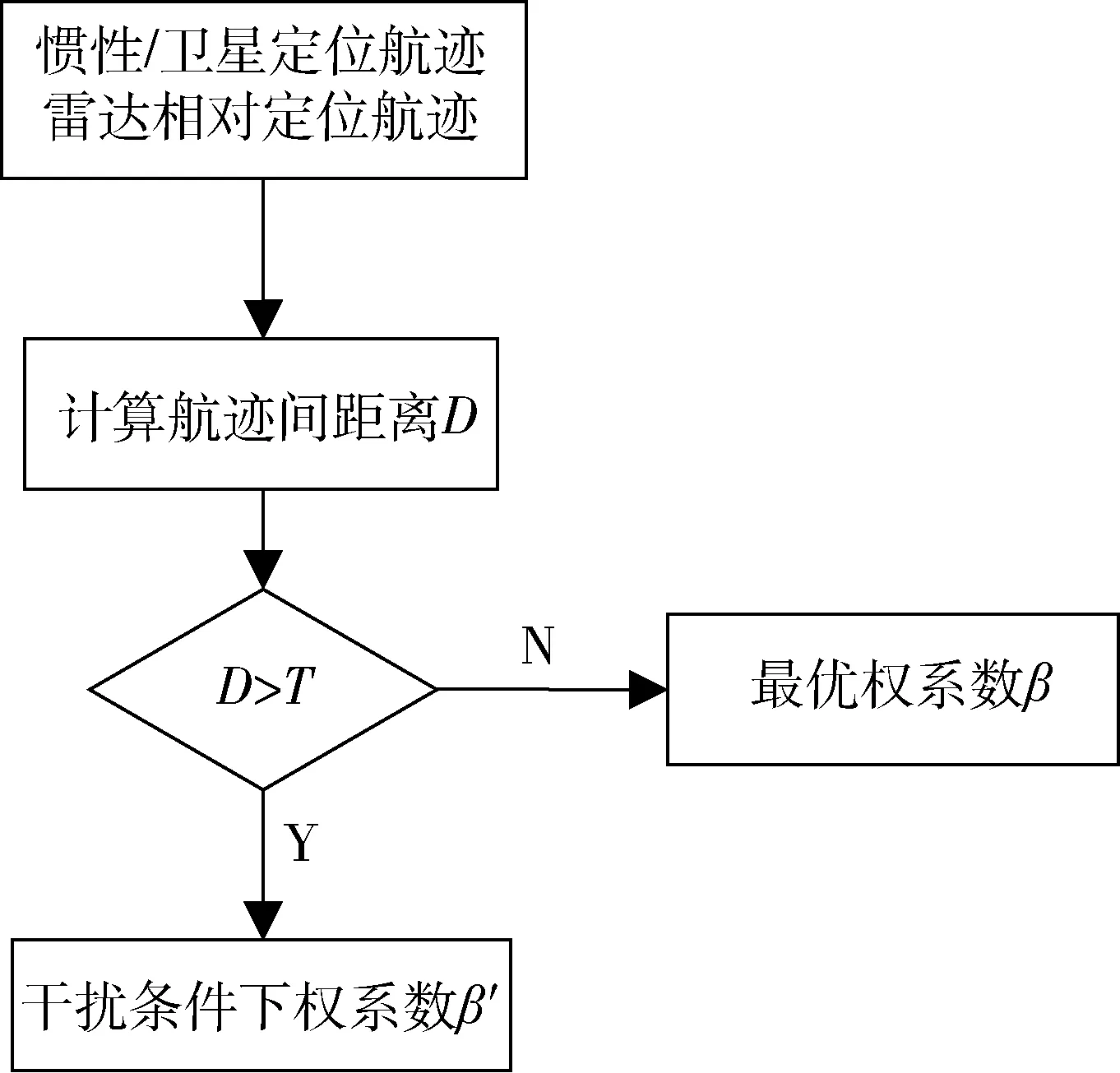
图2 多模型融合决策树
设P1和P2分别为估计x1和x2的误差协方差阵。统计距离D定义为局部航迹之间的距离[9]:
D=(x1-xTF)T(P1+PTF)-1(x1-xTF)
(18)
由于:
P1+PTF=P1(P1+P2)-1(P1+2P2)
(19)
x1-xTF=P1(P1+P2)-1(x1-x2)
(20)
则:
D=(x1-x2)T(P1+P2)-1P1(P1+2P2)-1(x1-x2)
(21)
统计距离D实际上是度量局部航迹1和局部航迹2接近程度的一个量。在卫星导航信号正常的情况下,两条航迹很接近,两个滤波器正常工作,可以采用最优权系数β计算系统的航迹输出。若D>T,则表示经过惯性/卫星组合导航滤波器校正后的输出误差较大或者发散,此时使用新的权系数β′=0.93,降低惯性/卫星组合导航输出的航迹在融合后输出中的比重,确保融合后的航迹精度。
4 仿真结果与分析
4.1 仿真条件
在北东地导航坐标系下描述长机与僚机的运动,长机的位置方程为:
rx=50t+5cos(0.01t)
(22)
ry=1000sin(0.04t)
(23)
rz=-5t
(24)
僚机的位置方程为:
rx=50t+5cos(0.01t)+2cos(0.001t)-1000
(25)
ry=1000sin(0.04t)+2cos(0.001t)-1500
(26)
rz=-5t+4cos(0.001t)
(27)
僚机雷达测角误差为0.3°,测距误差为15m。僚机惯导采用低成本IMU,误差如表1所示。

表1 子惯导IMU的误差
4.2 仿真结果
协同机群起飞后,僚机90s开始雷达测量,惯性/卫星/雷达协方差交叉融合卡尔曼滤波航迹输出结果如图3~ 5所示。从图中可以看出,经融合后的定位精度在1.5m以内。曲线中的锯齿形波动主要由雷达测角误差引起,通过与惯性卫星组合导航结果融合后,该波动明显减小。
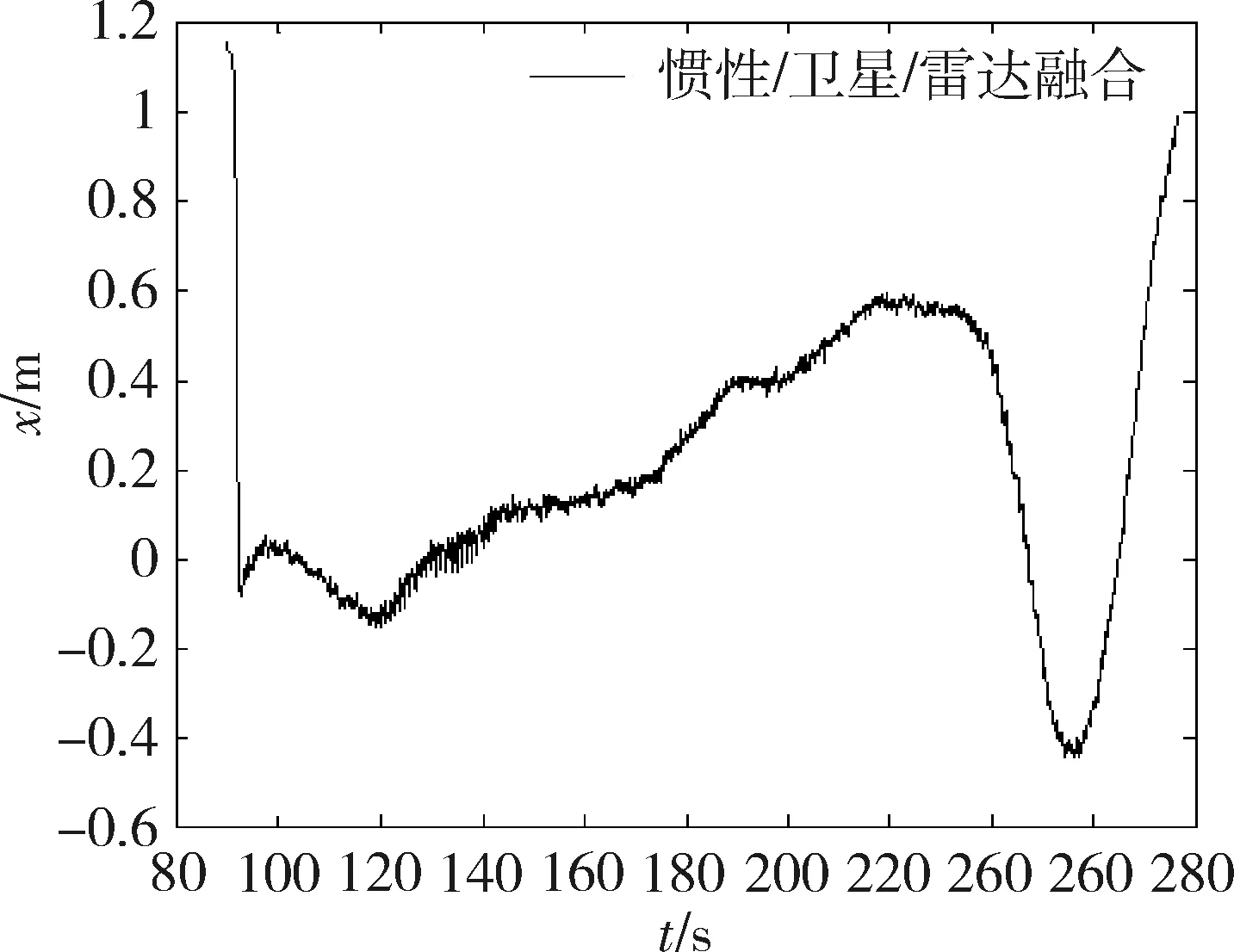
图3 航迹融合后x方向位置误差

图4 航迹融合后y方向位置误差

图5 航迹融合后z方向位置误差
起飞后120s~240s之间卫星导航信号丢失,经航迹决策判断惯性/卫星/雷达协方差交叉融合使用新的权重系数,航迹输出的仿真曲线如图6~ 8所示。从图中可以看出,卫星导航信号丢失后,所提出的惯性/卫星/雷达协方差交叉融合卡尔曼滤波器的x和z方向输出有效地抑制了位置误差变大。当卫星导航信号恢复后,定位精度立即恢复到卫星信号丢失前的水平。

图6 航迹融合结果与惯性/卫星x方向位置误差比较
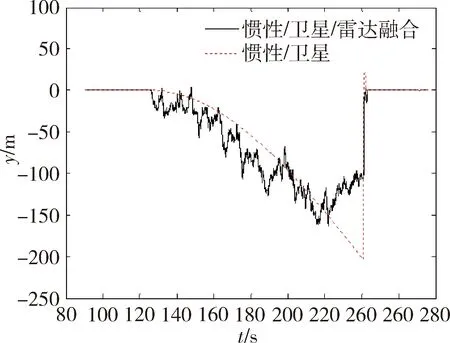
图7 航迹融合结果与惯性/卫星y方向位置误差比较

图8 航迹融合结果与惯性/卫星z方向位置误差比较
5 结论
在机群协同编队中,僚机使用基于协方差交叉融合的惯性/卫星/雷达定位方法,具有高精度高可靠的特点,特别在卫星导航受干扰不可用的情况下,能够有效地抑制惯性导航误差漂移,提升了机群协同编队的作战性能。
猜你喜欢
小哥白尼(军事科学)(2021年4期)2021-07-28
西安航空学院学报(2020年5期)2020-12-08
小学科学(学生版)(2020年8期)2020-08-24
小哥白尼·趣味科学画报(2020年1期)2020-06-09
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
时代青年(上半月)(2017年1期)2017-02-09
北京航空航天大学学报(2016年6期)2016-11-16
山东冶金(2015年5期)2015-12-10
舰船科学技术(2015年8期)2015-02-27