模型驱动复杂机电系统软件与物理并行概念设计
2021-11-18 12:19吴凌九秦绪佳陈佳舟刘玉生
中国机械工程 2021年21期
曹 悦 吴凌九 秦绪佳 陈佳舟 刘玉生
1.浙江工业大学计算机科学与技术学院,杭州,310023 2.西安卫星测控中心,西安,710043 3.浙江大学计算机辅助设计与图形学国家重点实验室,杭州,310058
0 引言
复杂机电一体化系统通常由包含物理子系统及其相关控制器、传感器、促动器的基本系统以及对这些基本系统的行为进行协调的高层信息处理系统组成[1]。它并不是机械技术、电子(微电子)技术、信息(信息处理)技术以及其他新技术的简单组合、拼凑,而是有机地相互融合(结合),因此,其设计方法应当改变过去拼拼凑凑的“混合”设计法,从系统整体的角度出发,采用现代设计、分析的方法,充分发挥相关学科的技术优势[2]。
概念设计是产品设计过程中最富创造性的阶段,它所产生的结构方案是后期详细设计的基础[3]。由于复杂机电系统具有多学科特性,故并行概念设计是现代设计的发展趋势之一[4]。并行设计要求在产品设计阶段就按照并行、交互、协调的工作模式进行系统设计[2]。随着系统智能化程度的提高,其信息处理部分即高层控制软件正逐渐成为复杂机电系统的核心竞争力[5]。然而,长期以来,软件作为复杂机电系统的重要组成部分并没有融入系统的并行概念设计过程中,而是在以物理为核心的基本系统设计完毕后才开始其设计。这种串行设计方法严重限制了软件子系统的设计求解空间,也难以发现并解决由软件与物理耦合导致的早期设计缺陷,因此,已无法适应复杂机电系统软件与物理融合的新特征[6]。
针对这一问题,本文以基于模型的系统工程[7]的标准系统建模语言(systems modeling language,SysML)为基础,提出了一种模型驱动的软件与物理并行概念设计方法。
1 多领域并行概念设计与详细设计
复杂机电系统涉及多个领域,因此,其设计需要多领域共同协调完成。为此,许多研究人员对复杂机电系统从概念设计到详细设计阶段的多领域并行设计进行了探索。
1.1 多领域并行概念设计
多领域并行概念设计的相关研究可分为两大类:一类是如何系统化地生成可行的系统概念;另一类是如何选择满足设计要求的最优方案。
在系统概念生成的相关研究中,采用统一的知识表示方法作为多领域设计的基础已成为许多研究工作的共识,而由于功能是系统正向设计的起点,因此,基于统一功能模型开展并行设计是一种主流思路。PAHL等[8]提出的基于流的功能表示是概念设计领域最为主流的功能模型,这种统一的功能表示已被广泛应用于许多设计领域。WAN等[9]提出了一种针对汽车信息物理融合系统的功能级并行设计方法,能够从统一的功能模型自动检索物理及控制组件。CHEN等[10]开发了基于知识的多学科协同创新设计框架,采用基于仿真的方式从功能推理工作原理。另一种常用的功能表示是UMEDA等[11]提出的功能-行为-状态(function-behavior-state,FBS)功能本体。基于这种功能表示,ALVAREZ CABRERA等[12]提出了一种架构模型来支持机电一体化产品的协同设计以及控制软件的自动生成。SAKAO等[13]基于FBS功能模型所描述物理现象的执行序列自动生成定性和定量的控制流程。HELMS等[14]结合两种功能表示方法,基于面向对象图语法提出了一种设计集成方法以自动生成产品架构解决方案。然而,由于这些功能表示方法仅描述物理变换过程,无法表达由软件所控制的离散执行序列,因此难以揭示软件和物理设计之间的关联关系,也无法支持其并行设计。
系统概念评估的相关研究主要解决如何对多种系统概念架构进行量化评估以从中选择最优方案,其核心工作是定义能够同时体现多领域设计目标的量化指标。其中,代表性的指标有BEHBAHANI等[15]提出的机电一体化设计商数(mechatronic design quotient,MDQ)以及MOHEBBI等[16]提出的多标准配置文件。然而,这些工作主要关注系统概念的多领域并行评价而非自动生成。
1.2 多领域并行详细设计
多领域并行详细设计主要关注如何在考虑多领域耦合的情况下确定各领域子系统设计变量的最优值。LI等[17]提出了一种面向控制的设计(design for control,DFC)方法,该方法强调获得机械结构的简单动态模型以支持控制器设计。胡洁等[18]基于约束网络模型对多阶段、多学科设计约束进行建模并确定参数的一致性区间,从而实现最优参数值选取。BEHBAHANI等[19]提出了一种基于MDQ的详细设计方法,从而对多学科设计进行并行优化。MOHEBBI等[20]提出了一种多学科目标函数,通过对该函数进行优化,可以实现多学科并行详细设计。这些研究的基本思路是:充分考虑多学科设计变量之间的耦合关系,并在此基础上将设计问题转化为多目标优化问题进行求解。这些方法主要关注系统定量参数值的调优,而概念设计的目标是确定系统的基本工作原理,难以获得系统的定量参数值,因此,这些基于优化的并行设计方法无法适用于系统概念设计。
综上所述,当前复杂机电系统多领域并行概念设计的相关研究主要面向物理系统与其底层连续控制器的协同,而没有对高层控制软件与物理子系统之间的并行设计提供支持。并行详细设计的相关方法则主要解决多领域子系统设计变量的协同优化问题,无法适用于概念设计阶段对于系统基本结构的探索。
2 方法概述
针对复杂机电系统并行概念设计中的上述问题,本文提出了一种软件与物理并行概念设计方法。该方法能够支持物理子系统原理方案和高层控制软件基本架构与行为的并行设计,从而实现系统早期设计中的架构级设计空间探索。
为实现上述方法,需解决以下三个关键问题:①构建能够对软件与物理子系统功能进行统一表征的功能模型。该功能模型需能够对物理子系统实现的连续物理变换以及软件子系统实现的离散时序控制进行统一表征,并支持两类功能的单独提取从而驱动各领域设计的并行开展。②在传统的物理子系统概念设计中引入时序约束。传统的概念设计方法主要基于物理功能检索工作原理,但事实上,一个工作原理可实现多种效应,其间所隐含时序关系必须与软件所控制的物理功能的执行顺序保持一致。③支持软件组件及其行为的自动生成。与通用软件不同,复杂机电系统的控制软件与受控物理系统之间存在紧密关联,这一方面会对控制软件的结构与行为产生约束,同时也使其自动生成成为可能。
针对上述三个问题,本文首先将基于流的功能表示与数据/控制流图相结合,并以SysML活动图为基础,构建支持软件与物理功能统一表征的混合功能模型(hybrid functional model,HFM),之后,以HFM为基础并行开展物理与软件子系统设计。一方面,基于功能效应匹配[21]由物理功能检索工作原理,并基于物理功能的执行顺序对工作原理的隐含时序关系进行筛选;另一方面,基于分布式控制应用(distributed control application,DCA)[22]设计模式所定义物理功能与软件行为的本质关联,识别软件组件并自动生成其行为模型。方法框架如图1所示。
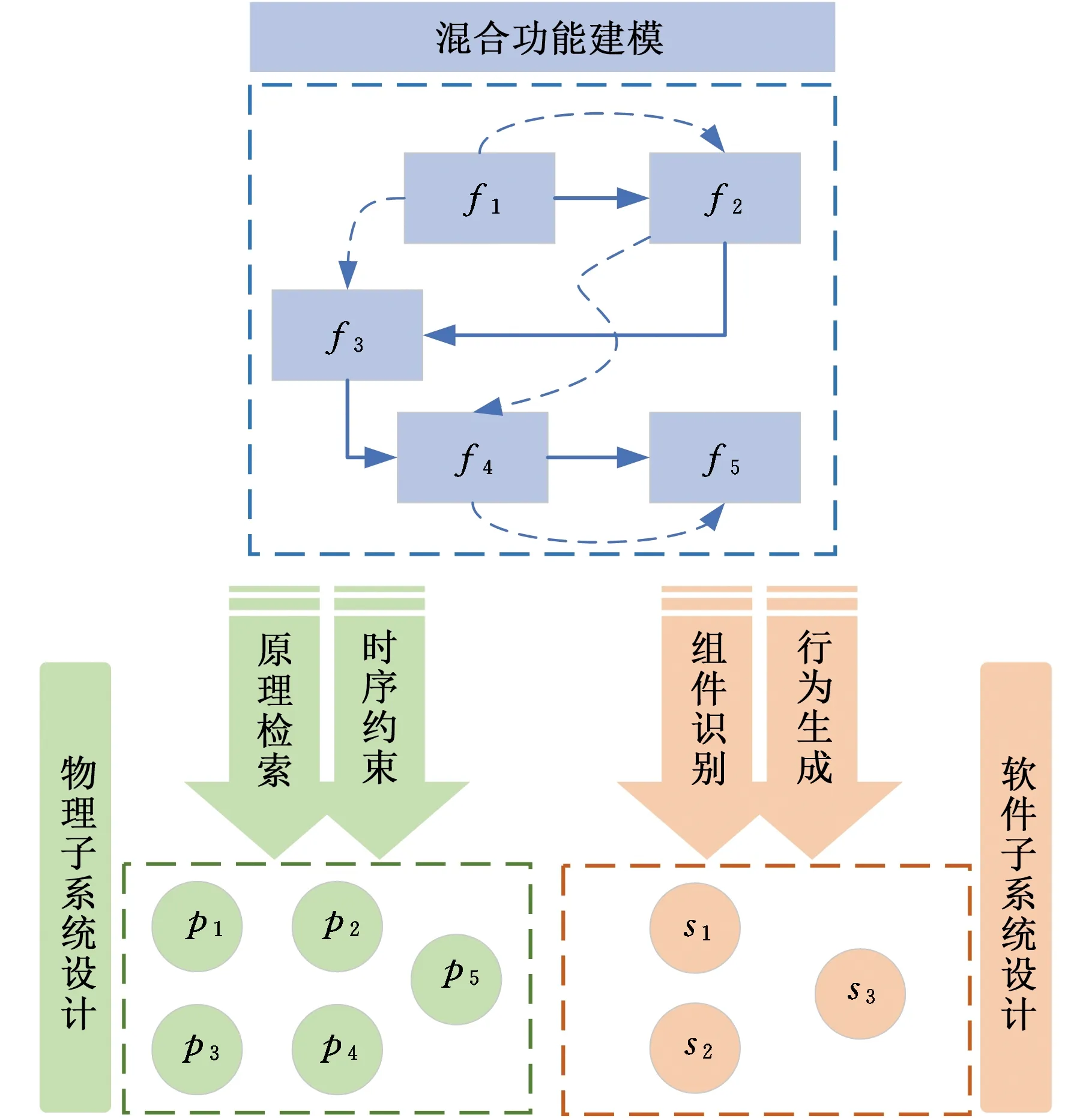
图1 基于混合功能模型的并行概念设计方法Fig.1 Parallel conceptual design approach based on hybrid functional model
3 基于SysML的混合功能建模
统一的功能模型是开展多领域并行概念设计的基础。然而,当前主流的基于流的功能表示仅能描述物理子系统实现的连续物理变换,无法表示物理变换之间的离散执行顺序,而这正是软件子系统所承担的主要功能之一。为对软件与物理功能进行统一表征,本文提出HFM形式化定义,并给出HFM的图形化建模方法。
3.1 HFM形式化定义
尽管软件与物理子系统在设计理念与表征方法上差异很大,但是它们在功能级别上存在相关性,即软件执行过程中的每个步骤能够触发物理子系统的功能。例如,自动驾驶汽车的功能涉及“移动”和“停止”两个步骤之间的复杂执行序列,这两个步骤最终通过车轮和制动器等物理结构实现。该理念与混合自动机[23]十分相似,后者将软件的离散行为用状态及状态之间的转换表示,并将由微分/代数方程描述的连续物理行为嵌入到每个状态中。这种对目标系统行为特征的抽象方法也被称为物理系统信息化[24]。
由于软件的离散控制流程可通过数据/控制流图表示,而连续物理转换可采用功能效应即系统对物理对象属性的客观改变来描述,因此,通过将以功能效应为核心的物理功能嵌入到数据/控制流图中,即可形成对软件与物理功能统一表征的HFM。HFM形式化定义如下:
HFM={A,P,E,δ,φ,τ}
其中,A为系统工作流程中一系列动作的集合,动作是功能的一次具体执行,A={a1,a2,…,an};P为系统参数的集合,包括输入、输出以及内部参数,P={p1,p2,…,pn};E为连接动作或参数的流的集合,E={e1,e2,…,en};δ表示动作以及参数之间基于流的连接关系,δ:(A∪P)×E→(A∪P);φ:A→(PF∪SF∪CN),它将功能赋予触发这些功能的动作;PF、SF、CN分别为物理功能、软件功能以及控制节点的集合;τ:(P∪E)→FT,它为参数和流指定其类型;FT表示流类型的集合。
物理功能是指仅由物理结构及其连续控制器实现的功能,其形式化定义为
PF={U,V,Σ,ω,τ}
其中,U、V分别表示物理功能的输入和输出,它们是功能之间传递物质、能量和信号的接口;Σ为功能的功能效应集合,Σ={fe1,fe2,…,fen},功能效应fei通过输入输出流及其之间的属性或关系改变来描述;ω:U×Σ→V,描述输入流经过功能效应的转换产生输出流的过程;τ:(U∪V)→FT,描述输入输出流的类型。
软件功能是指仅由软件构件及其硬件运行环境实现的功能,其形式化定义为
SF={U,V,Σ,ω,τ}
该定义中除Σ之外的其他元素与物理功能定义类似。在物理功能中,功能的输入输出流的改变通过功能效应表示,而在软件功能中,由于软件程序的复杂性和多样性,使其很难以一种统一的抽象方式对软件程序的功能进行描述,因此,本方法简单采用动词对其进行说明。
3.2 HFM图形化建模
上述形式化方法难以被设计人员直接使用,因此,本文在SysML基础上构建图形化的功能建模语言来支持HFM的建模。由于HFM在语法和语义上与SysML活动图具有高度相似性,因此,选取SysML活动图中相关模型元素进行扩展,创建支持混合功能建模的构造型,这些构造型共同组成混合功能建模语言(hybrid functional modeling language,HFML)扩展包,其中主要的构造型如图2所示。

图2 HFM建模相关构造型Fig.2 Stereotypes for HFM modeling
功能由活动(Activity)的构造型Function表示。功能进一步划分为PhysicalFunction和SoftwareFunction两个子类。功能的输入输出由参数Parameter的构造型Flow表示。流的类型为FlowType,它由模块block继承而来。动作表示功能的一次具体执行,它通过Action表示。动作之间通过SysML的对象流object flow和控制流control flow进行连接。其中,对象流连接动作的栓Pin表示功能执行时传递的物料、能量或数据;控制流直接连接动作本身,表示动作的执行顺序。对于复杂的执行过程,还可以借助活动图中的控制节点control node,如判断/合并(decision/merge)、分支/集合(fork/join)等来描述。物理功能实现的功能效应通过SysML约束块Constraint Block的子类FunctionalEffect表示。软件功能的效应则通过SysML中不透明行为OpaqueBehavior的构造型SoftwareEffect表示。
4 带隐含时序约束的物理子系统设计
物理功能由连续控制器所控制的多物理域(机、电、液、热等)组件实现,因此,物理子系统设计的核心问题是如何由物理功能推理出实现这些功能的物理原理方案,即工作原理。本文首先基于物理功能的功能效应检索工作原理,然后,提出基于隐含时序约束的工作原理筛选方法,以保证物理设计与软件控制流程的一致性。
4.1 基于功能效应的工作原理检索
产生物理概念的基本思路是,以物理功能为查询条件在知识库中检索能够实现该功能的工作原理,然后基于工作原理构建相应的物理结构。本文采用基于功能效应的检索方法[25]实现这一过程。首先基于形式化本体描述语言构造工作原理知识库,每个工作原理记录其能够实现的功能效应;然后,根据物理功能与工作原理描述的要求与能提供的功能效应,通过功能效应匹配实现工作原理的检索过程。假设某功能f要求的功能效应为fer,其输入流类型为tr,某工作原理w能够实现的功能效应为fep,其输入流类型为tp,检索可通过以下三种方式实现。
(1)完全匹配。匹配规则为tp=tr∧fep=fer→w├f,符号├表示工作原理满足功能效应。
(2)语义兼容匹配。记fep的输入输出流类型分别为tpi和tpo,变换类型为cp,fer的输入输出流类型分别为tri和tro,变换类型为cr,则其匹配规则为tp⊆tr∧tpi⊆tri∧tpo⊆tro∧cp⊆cr→w├f,符号⊆表示相等或为其子类。
(3)模糊匹配。记vp与vr分别为fep与fer的功能动词,则匹配规则为vp=vr→w├f。
由上述三种查询方法可以看出,完全匹配查询的精确度最高,但灵活性最低,可能发生无法找到工作原理的情况;相反,模糊查询的灵活性最高,能够查找到最多的工作原理,但精确度最低;语义兼容查询则能够在精确度和灵活性之间取得平衡。
4.2 基于隐含时序约束的工作原理筛选
上述检索过程完全基于单个物理功能来完成,没有考虑物理功能之间的时序关系。事实上,一个工作原理可能实现多个物理过程,而这些物理过程之间可能存在隐含时序关系。例如,由阿克曼转向驱动的轮式小车在转动时必然发生平动;由差速驱动的小车可以独立执行平动和转动,但却无法同时执行两种行为。工作原理的隐含时序关系必须符合其所实现的物理功能的时序关系。例如,如果两个功能f1与f2顺序运行,则当工作原理w实现f1时不应引发实现f2的物理过程;如果f1与f2并行运行,则当工作原理w实现f1时应同时执行实现f2的物理过程。
为实现对工作原理的筛选,本文提出了一种基于时序约束的筛选规则模板,其基本原理是:假设工作原理wk通过其所提供的功能效应fei和fej实现HFM中的动作ai和aj,则当fei和fej的执行关系与ai和aj的执行顺序不兼容时,判定wk无法满足ai和aj,此时,包含wk的所有物理结构方案应被排除。
基于这一思想,可将规则模板形式化定义为AR∧l1∧l2∧r1∧r2∧e1∧e2∧BR→s,其中,AR={ar1,ar2,…,arn}为一个命题集合,这些命题说明两个动作ai和aj之间的执行顺序。这些关系可以是两者之间的直接关系,也可以是其属性之间的复杂关系。l1和l2为2个命题,表示将ai和aj分配给wk。r1和r2为2个命题,表示ai和aj分别由wk的两个功能效应fei和fej实现。e1和e2为2个命题,表示fei和fej由wk提供。BR={br1,br2,…,brn}为一个命题集合,这些命题说明两个功能效应fei和fej之间的关系。这些关系可以是两者之间的直接关系,也可以是其属性之间的复杂关系。s为一个命题,表示wk无法满足ai和aj。s由前述命题的合取推断而来。
通过对上述命题中的AR和BR进行配置,可以基于规则模板创建具体的筛选规则。图3展示了一条基于网络本体语言OWL2配置完成的规则,其中,ai和aj之间具有顺序执行关系,通过inSequence关系描述;fei和fej之间具有因果关系,通过causes关系描述。当ai和aj顺序执行,而fei和fej却具有因果关系(即二者会同时发生)时,wk被判定为无法满足ai和aj,推断其isUnsatisfactory属性为true。
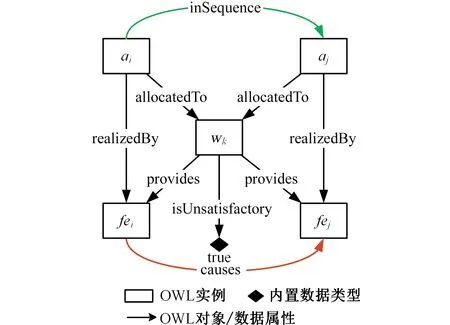
图3 基于隐含时序的工作原理筛选规则示例Fig.3 Sample rule for filtering working principles based on implicit temporal relationships
5 基于DCA的软件子系统设计
软件子系统的组件可分为两类:一类为高层控制算法;另一类实现系统工作过程的控制,称为时序控制器。时序控制器与物理功能及其执行顺序存在紧密联系,这使得由HFM自动推理生成这类软件组件及其行为成为可能。
5.1 基于DCA的功能与软件设计因果关联
实现由功能模型自动推理软件子系统设计的关键是找到二者之间的因果关联。控制软件的主要功能是通过操纵系统的物理资源来实现系统的预期执行过程,这隐含了控制软件与系统物理结构和功能之间的关联关系。为了将这种隐含因果关联显式表达,本文采用DCA设计模式这一自动化控制软件的通用设计模式将功能与控制软件设计显式关联。
图4展示了DCA设计模式的架构。在该架构中,控制应用表示一个分布式控制应用程序,它是控制问题的一种解决方案,由多个时序控制器互联协同完成控制任务。控制器控制由物理资源组合而成的受控设备,二者之间通过传感器和促动器相连形成控制闭环。控制器的控制行为通常采用有限状态机(finite state machine,FSM)描述,它根据事件或条件触发受控设备的物理行为来执行功能流程中的相应功能。

图4 DCA设计模式Fig.4 DCA design pattern
从DCA设计模式可以看出,HFM与软件设计之间存在以下两种因果关联:①每个时序控制器负责协调HFM中部分子功能的执行流程,即时序控制器与HFM功能子集相对应,因此,可以通过对HFM中的功能进行分组来确定时序控制器;②时序控制器行为模型中的每个状态触发一个受控设备的物理行为以实现HFM中的一个物理功能,因此,可以基于功能流程自动生成时序控制器基于FSM的行为模型。
5.2 时序控制器及其行为自动生成算法
由上述因果关联①可知,在设计时序控制器时,应首先将HFM中的功能分组,然后为每组分配一个时序控制器来管理其工作流程。功能可以从两个方面进行分组:一种是从目的角度,将用于相同目的的功能组合在一起;另一种是从结构角度,将由相同工作原理实现的功能组合在一起。
由上述因果关联②可知,时序控制器行为模型中的状态及其转换与其所分配的功能及其之间的控制流存在对应关系,因此,在已知时序控制器sc及其所分配的动作集合Asc的前提下,可以开发算法以实现从功能自动生成sc的行为,算法的主要步骤如下。
(1)基于Asc中的动作{a1,a2,…,an}创建sc的状态{s1,s2,…,sn}。
(2)将任意两个动作ai和aj之间的控制流cij映射为sc相应状态si和sj之间的转换tij。
(3)记Ein为从sc实现的动作指向其他时序控制器的动作的控制流。对于这类跨越sc边界的控制流进行如下特殊处理:①将Ein中的控制流{ci1,ci2,…,cin}映射为从sc状态机初始节点出发的转换{ti1,ti2,…,tin};②如果这样的控制流仅有一条,则意味着该流是sc管理的工作流程的唯一入口点,则将触发该转换的请求名称设定为sc的名称;③如果存在多条这样的控制流,则首先创建一个与初始节点相连的选择节点d,并以该选择节点d为起点,为每一个控制流cik创建一个指向相应状态sk的转换tik。由于每一条转换tik对应sc管理的工作流程的一个子流程,因此触发这些转换的请求应由设计人员根据子流程的语义手动指定。
(4)记Eout为从其他时序控制器的动作指向sc的动作的控制流。Eout中控制流的处理方法与Ein类似,在此不做赘述。
6 案例分析
本文以移动机器人系统[26]为例对提出的模型驱动软件与物理并行概念设计方法加以说明。该系统的概念示例如图5a所示。系统需实现图5b所示的迷宫觅食任务。该机器人需要在迷宫中探索,并找到放置于迷宫中任意位置的一个有颜色的铁罐。图中方形表示机器人的起始位置,圆形表示待拾取的铁罐。

(a)移动机器人系统概念示例(b)迷宫示意图图5 移动机器人系统概念示例及其任务说明Fig.5 Concept of the mobile robot and its task
对该系统进行功能分析,基于第3节提出的混合功能建模理论,构建图6所示的HFM。该模型表示系统首先对四周环境进行探索以判断障碍物位置(DetectPosition),并同时判断障碍物颜色以确定障碍物类型(DetectColor);然后,信息处理系统根据环境数据确定机器人的下一步动作(GuideAction);根据指示,机器人执行移动(MoveOneStep)或拾取(PickCan)动作。以移动为例,可进一步分为四种情况,即向左移动(TurnLeft→MoveForward)、向前移动(MoveForward)、向右移动(TurnRight→MoveForward)以及向后移动(TurnLeft→TurnLeft →MoveForward)。在这些功能中,DetectPosition与DetectorColor为物理功能,由传感器实现;TurnLeft、TurnRight、Pick和MoveForward为物理功能,由机械结构及其底层控制器实现;GuideAction为软件功能,由高层控制算法模块实现。这些功能之间的执行流程由动作之间的控制流表示,通过时序控制器实现。为简化起见,图中隐藏了动作之间的对象流。物理功能需实现的物理变换通过其功能效应描述,图中展示了MoveForward的类型为ValueChange的功能效应PickerPositionChange,其含义为对物料流Picker的属性Position进行改变,改变趋势为Increase。

图6 移动机器人系统HFMFig.6 HFM of the mobile robot system
在HFM基础上,可以并行开展物理与软件子系统设计。物理设计在设计引擎的支持下,针对HFM中的物理功能,采用第4节所述基于功能效应匹配的方法对工作原理知识库进行检索。例如,如图7所示,以MoveForward为查询条件对工作原理知识库进行检索,采用语义兼容匹配方式,可以查找到名为WheeledCartWithDiff-Drive的工作原理,即采用差速驱动的四轮小车。

图7 工作原理检索示例Fig.7 Working principle retrieval
除了上述工作原理之外,还可检索到其他多个工作原理,如阿克曼转向驱动四轮小车WheeledCartWithAckermannSteering以及单轮驱动小车WheeledCartWithSingleWheelDrive等。之后,针对上述工作原理执行基于时序约束的筛选。阿克曼转向和单轮驱动两种工作原理均无法实现原地转向,在执行转动时必然发生平移,即二者之间具有causes关系,而转动功能TurnLeft/TurnRignt与平移功能MoveForward在HFM中为顺序执行,即二者之间具有inSequence关系,根据筛选规则,判定这两种工作原理无法满足指定功能。因此,最终选定差速驱动四轮小车作为实现转向以及平移功能的工作原理,其工作原理如图8a所示。它包含前后两个从动轮、左右侧两个驱动轮以及一个底座。当其左右侧驱动轮速度相同时,实现前进或后退动作;当其左右侧驱动轮速度相反时,实现转向动作。基于该工作原理设计的转向与移动模块的物理架构模型如图8b所示。

(a)差速驱动四轮小车工作原理 (b)物理架构模型示例图8 工作原理与物理架构模型示例Fig.8 Sample working principle and physical architecture model
在软件设计时,根据第5节提出的时序控制器设计方法,需要先对功能进行划分。例如,根据功能目的,将DetectPosition和DetectColor两个用于环境检测的功能组合在一起;根据实现功能的物理机构,将由TurnMoveModule实现的三个功能TurnLeft、TurnRight和MoveForward组合在一起。这一划分过程如图9所示,它采用SysML中的活动分区(即泳道)显式表示功能与时序控制器之间的分配关系。根据功能分组,可确定三个低层时序控制器DetectionCoordinator、TransferCoordinator和PickCoordinator,它们通过一个更高层次的时序控制器ForageCoordinator来协调行为。

图9 功能分组及时序控制器示例Fig.9 Activity partitions and sequence coordinators
基于HFM与时序控制器之间的关联关系,采用第5节所述行为生成算法,可自动生成其行为模型。如将图9所示功能模型中间泳道分配给时序控制器TransferCoordinator,根据泳道包含的功能及其之间的控制流可以自动生成Transfer-Coordinator的行为模型,该模型如图10状态机所示。活动图中每个动作映射为状态机中的各状态,三个选择节点映射并合并为状态机中的选择节点d1。动作之间的控制流映射为状态之间的转换,转换触发条件与控制流上的条件一致。

图10 时序控制器行为模型示例Fig.10 Behavior model of the sequence coordinator
从上述过程可以看出,本文提出的方法能够在混合功能模型的基础上驱动物理子系统原理方案与软件时序控制器设计的并行开展。由于在设计过程中充分考虑了软件与物理子系统之间的隐含时序耦合,因此能够有效过滤不合理的工作原理方案以避免机械结构设计的重大缺陷。此外,由于建立了软件行为与物理功能及其执行顺序的关联关系,因此能够自动推理生成软件时序控制器行为模型,提高了软件子系统设计效率。
7 结论
(1)将基于流的功能表示与数据/控制流图相结合,并以此为基础对SysML活动图相关模型元素进行扩展,形成图形化混合功能建模方法。该方法实现了软件与物理功能的统一表示,为并行概念设计奠定理论基础。
(2)指出工作原理具有隐含时序关系这一关键问题,并基于此提出时序约束规则模板,实现了带隐含时序约束的工作原理检索与筛选方法。该方法一方面采用了形式化语义而非关键词实现工作原理的检索,因此能够提高检索的灵活性,从而扩大可行工作原理解空间以提高设计结果的创新性;另一方面,由于考虑了工作原理隐含的时序关系,因此能够基于功能执行顺序对工作原理进行筛选,从而能够有效避免因隐含时序耦合导致的不合理的物理设计方案以保障设计结果的正确性。
(3)基于分布式控制应用设计模式揭示了物理功能与软件设计的本质关联,并实现了软件时序控制器及其行为模型的自动生成,从而提高软件设计的质量和效率。
(4)本文方法仅对软件组件中的时序控制器与物理子系统之间的时序耦合关系进行了研究,未对其他类型的复杂耦合以及其他种类的软件组件做进一步研究,因此,未来工作将从以下两个方面开展:①收集总结时序控制器与物理子系统之间的多种耦合类型,如实时性约束等,并基于此对功能模型及工作原理筛选方法进行扩展;②对软件子系统中的高层控制算法及其与时序控制器、物理子系统之间的耦合关联进行深入分析,从而对整个并行设计过程进行完善。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
中国农业信息(2021年3期)2021-11-22
建材发展导向(2021年7期)2021-07-16
数字技术与应用(2021年5期)2021-06-29
电子科技(2021年2期)2021-01-08
计算机工程与设计(2020年11期)2020-11-17
文艺生活(艺术中国)(2018年11期)2019-01-03
电子制作(2017年13期)2017-12-15
电子制作(2016年15期)2017-01-15
工业设计(2016年11期)2016-04-16