多干扰源下煤矿井下移动目标精确定位仿真
2021-11-17 07:09张楠
计算机仿真 2021年5期
张 楠
(山西大同大学机电工程学院,山西 大同 037003)
1 引言
随着科技化、信息化、智能化的不断更新进步,使得大量创新型电力电子仪器、电气器件的启动以及无线射频装置等都被广泛用在煤矿井下中。同时,煤矿井下环境恶劣并且结构复杂,监控设备常常受到多干扰源的影响,导致信号传输中会出现部分数据丢失、错报警以及断电等情况的发生,无法精准地获取移动目标的具体位置[1]。
针对基于多干扰源的煤矿井下移动目标精确定位的相关研究诸多,例如李论,张著洪[2]根据煤矿井下巷道移动目标,受多干扰源影响,导致目标定位不精准,提出一种高斯滤波方法下移动目标实时分段定位。首先通过曲线拟合方式与加权算法,实时得出目标移动过程中的丢失因子与多干扰源参数,再建立适合多干扰源情况下矿井信号输送模型,然后采用均方差迭代进行计算,得出不同阶段移动目标的多干扰源修正参数,并估算出移动目标最终位置,最后对估算得出结果进行检测;马凤英,翟波等人[3]根据煤矿井下安全监控器件优化处理后,仍然受到多干扰源影响,导致监控装置错报警或者漏报警,提出通过改进监控系统的供电方式来抑制多干扰源。首先提取煤矿井下防爆装置内滤波中的电感与电容数值,并根据电磁性能设计该装置的优化处理方案,再采用浪涌电压与电瞬变脉冲群滤波的两种方式对抗干扰器件进行优化处理。该方法符合防爆条件,同时加强煤矿井下监控系统抗多干扰源的磁能力,完善监控系统。
通过对上述文献进行分析,可知二者都可以有效抵御多干扰源,但由于抵御过程复杂,导致移动目标定位准确率较低。为此,通过对多干扰源的煤矿井下移动目标进行研究,提高定位的准确率,减少煤矿井下不必要损失。
2 多干扰源下矿井移动目标精确定位
2.1 煤矿井下多干扰源种类
煤矿井下多干扰源[4-5]主要分为自然与非自然干扰源两种。

图1 煤矿井下多干扰源原理
自然干扰源主要分为三种,第一种为雷电噪声;第二种为电阻噪声;第三种为无线电辐射干扰。雷电噪声与电阻噪声对于井上干扰较大,对地表下几百米或者几千米巷道中的信号接收装置干扰较小,基本上是可以忽略不计的;然而无线电辐射是指煤矿井下电气器件无法避免发生的干扰,其干扰程度非常小,由于煤矿井下的电磁结构复杂与环境恶劣,对电平干扰程度较高,对于无线电辐射干扰给掩盖住了,就不用担心无线电辐射干扰。总之,矿井自然干扰非常小,可忽略不计。
非自然干扰源常指人为干扰源,其包括输供电线路、高电压大型功率电路机器以及开关设备;牵引网络与电机车;无线装置干扰源;静电放电干扰源;其它设备等。
2.1.1 供电线路、高电压大型功率电路机器以及开关设备
矿井供电体系电压种类非常多,例如电阻体系和电感体系、电容体系等。在一些条件配合下会对部分频率发生最大电流或者最大电压,产生过电压或者过电流的现象。再根据电磁感应原理,谐波频率太高的电流就会导致电源电压波频改变,并采用电场耦合方式对井下电源中频率高的谐波进行处理,产生高频谐波电流与电压。这种干扰源是由开关工作产生的电磁场瞬间变化,其对电子器件的损害极大。当开关设备开和关过程中,就会产生大量电火花,电火花停留时间为5μs-5ms,产生电压约是正常电压两倍。在这某种情况下,瞬间变化电磁场可能是正常电压六倍左右。为此,供电线路、高电压大型功率电路机器以及开关设备都会产生许多干扰源,并且会沿着电路线路继续传播干扰。
2.1.2 牵引网络与电机车
煤矿井下牵引网络与电机车干扰分为固定电磁干扰源与流动电磁干扰源两种。固定电磁干扰源是由牵引网络所使用全部设备和输电线路发生漏电故障等导致的;流动电磁干扰源是因为电机车上的器件与单臂弓、双臂弓接触,不断产生火花,该火花产生脉冲干扰源具有一定振幅,并且持续时间长。
2.1.3 无线装置干扰源
矿井的无线通信装置,其发出的波频都带有信号的,对于自己来说是有益的信号,但对其它设备则就成无益信号,并对其它设备造成干扰,尤其是对煤矿井下监测机器干扰最大。
2.1.4 静电放电干扰源
煤矿井下能够产生静电的机器非常多,如开采、切割、破碎煤和岩石时,有时会在煤和岩石表面带上静电;煤炭输送机的动力带将煤和滚筒、托滚迅速摩擦,产生静电反应,就会出现静电放电现象,导致静电干扰。
2.1.5 其它设备
煤矿井下照明器件,基本上都使用荧光灯,由于水银放电过程中,会发射可见光或者紫外线,通过刺激管里的荧光粉而发亮的。而放电管里构成电浆,则就产生电磁干扰源。
2.2 多干扰源下煤井移动目标精确定位算法设计
针对上面几种干扰源,先采用一维空间矢量与矩阵算法对移动目标进行定位,再将得出定位结果进行网格划分处理,分析移动目标位置[6]和多干扰源之间联系,并且能缩小移动目标定位范围,提升移动目标定位的准确度,最终实现移动目标定位。计算流程如图2所示。
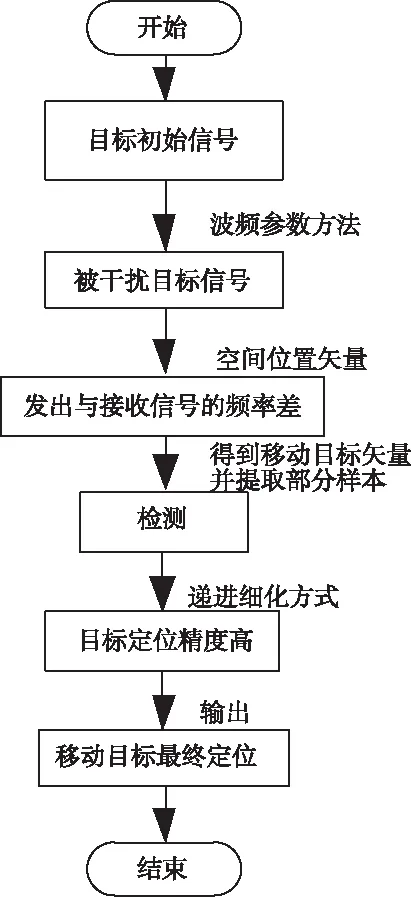
图2 移动目标精确定位算法设计流程
2.3 多干扰源下煤井移动目标精确定位实现
移动目标与多干扰源都是位于煤矿井下巷道中,首先采用网格划分方法对移动目标所在区域进行网格划分处理[7],再记录该信号传输过程中,经过多种设备干扰后的数据情况,最后把每个干扰数据输送井上的接收室。由于各设备干扰源的波频与位置是已知的,信号传输速度也是已知的,只需计算出位置移动目标位置。
想要精准获取移动目标的定位,就必须知道多干扰源[8-9]与移动目标之间联系,而最常使用的是波频参数方法,为了简化计算过程,设定多干扰源的谐波均为正弦波。(可以使用倍频方法获取信号传输中正弦波)。在m时间内接收到移动目标的信号则为
rm(t)=ams(t)ej2πfmt+wm(t)
(1)
其中,am表示为移动目标的信号输送衰减参数,衰减程度如图3所示;s(t)表示为多干扰源发出的正弦波;wm(t)表述为平均值为零的高斯白噪声;fmt表示为在m时间移动目标发出与接收信号的频率差。得到fm方程式为式(2)

图3 信号输送衰减变换程度
(2)
(3)

煤矿井下接收设备中提取移动目标在不同时间段的信号样本,设定N为信号的样本长度,得到式(4)与式(5)

(4)
Lm=diage{e-j2πfmt1,…,e-j2πfmtN}
(5)
式中,am:x:y代表m时间段移动目标信号的参数;wm代表接收装置提取N个样本的多干扰源信号;s代表多干扰源发出的正弦波信号;Lm代表{e-j2πfmt1,…,e-j2πfmtN}的对角矩阵。
采用网格划分方法对被干扰的移动目标进一步做划分处理,得到各网格所匹配值zx,y。假设当移动目标位于其网格里,则设定zx,y等于1;反之,则当移动目标位于其网格外,则设定zx,y等于0,其zx,y公式表示为
(6)
为了降低计算复杂程度,常使用递进细化方式对网格划分进行简化处理,其过程如下:
首先,把被干扰的移动目标开始位置区域划分为比较大的网格,其目的是能够迅速、准确地找到移动目标大概位置网格;
其次,把得到大概位置网格做进一步划分,获得小的网格;
最后,反反复复进行上一过程,一直到能得到较高精度定位结果。
通过上述过程后,在m时间收到移动目标的信号为

(7)
其中Lm:x:ysx:y代表为被干扰的移动目标,在网格横轴与纵轴发出与接收的信号频率差值参数[10]。为了快速得出结果,则将二维空间坐标变换成一维空间矢量,得到矢量式(8)
(8)
根据得出一维空间矢量结果,设定多干扰源的正弦波sk为已经确定未知谐波,并采用最大估计算法获得正弦波。根据式(8)获得信号正弦波为

(9)
当被干扰的移动目标在m时间段内输送信号为


(10)

(11)
当接收到全部的信号都是来源于相同网格的移动目标,对于全部的移动目标发出与接收的频率差值φk为
(12)
再设定Ψk为k∈{1,2,…,K}空间矢量,得出全部M时间内从在网格k被干扰的移动目标,所发出的信号为
(13)
通过矩阵计算方法,得出全部网格所含有空间矢量Ψk(k:1,…K)为
Ψ=[Ψ1,Ψ2,…,ΨK]MN×K
(14)
通过检测不同时间段多干扰源与移动目标的关系,发现移动目标始终都在煤矿井下巷道中相同位置上。为此,可以根据检测不同时间段的多干扰源正弦波,来计算出移动目标具体位置。再根据式(11)到(14)得到接收到的信号为
r=Ψ×z+w
(15)

(16)
公式中r代表M时间段内接收到全部信号的空间矢量;z代表网格的稀疏矢量;w表示高斯白噪声。为此,把移动目标定位不精准问题变换成一维空间矢量中的稀疏非零元素的定位问题,再采用凸优化问题方法进行进一步计算,得到式(17)。
(17)
其中,ε表示目标精确定位因子。根据式(17)完成最终移动目标的定位,其定位结果精准,并且简化了计算过程,缩短计算时间,实现了多干扰源下煤矿井下移动目标精确定位。
3 仿真结果分析

使用平方差算法,得出移动目标空间位置与被定位点的空间位置,以用来表现移动目标定位的准确度,并得到RMSE公式为

(18)
依据移动目标定位原理与算法,并采用表1中设定的检测参数进行计算,获得移动目标与多干扰源之间联系分布。图4与图5代表不同比例的移动目标定位分布图。图6代表在不同比例下移动目标定位误差变化情况。
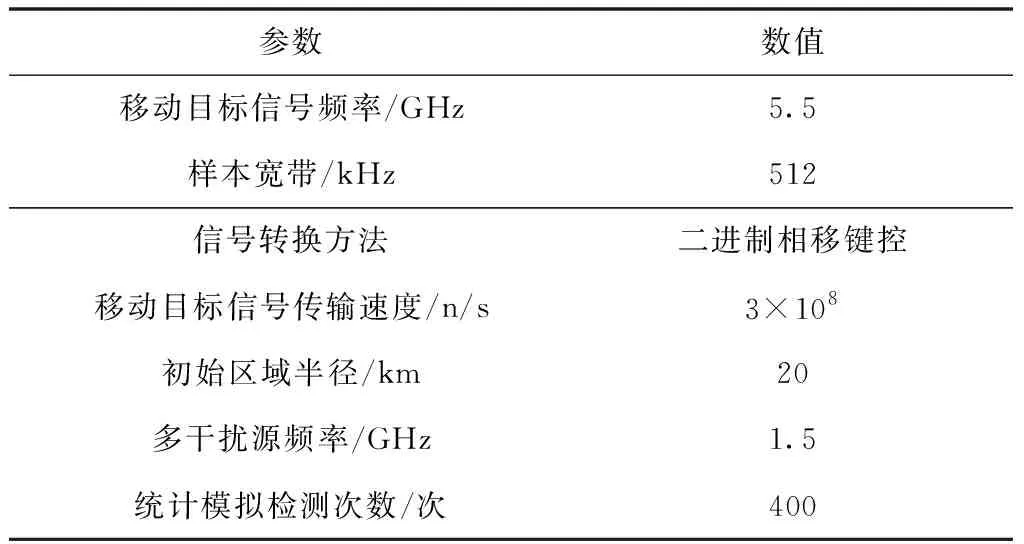
表1 移动目标检测参数设定
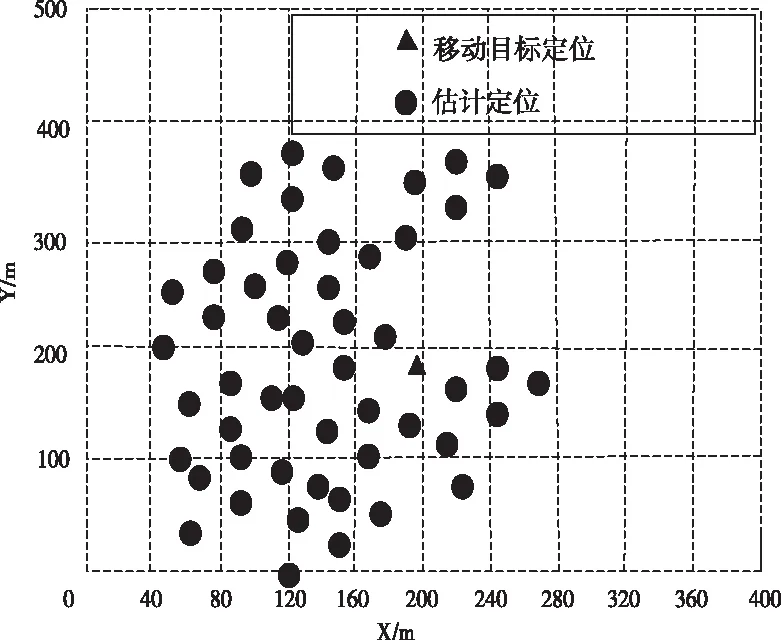
图4 移动目标的位置图(SNR=1dB)
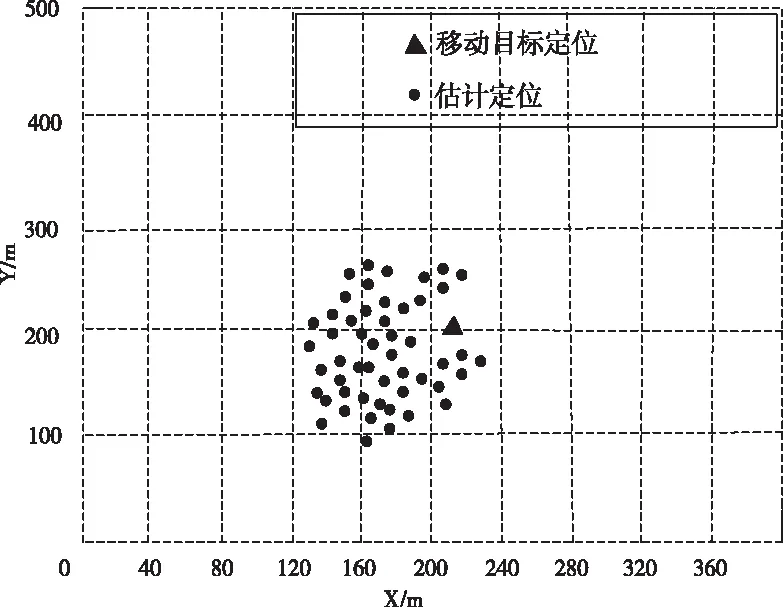
图5 移动目标的位置图(SNR=5dB)
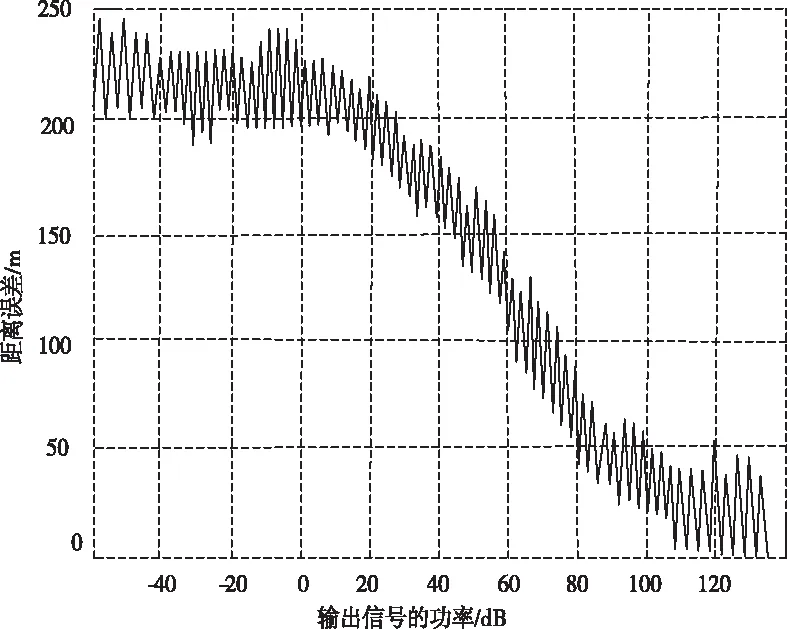
图6 不同比例下移动目标定位误差变化情况
根据图4到图6可以看出,当不同比例下移动目标输出信号功率近似120dB时候,移动目标定位误差快速降到0-50m里,可以有效实现多干扰源下煤矿井下移动目标精确定位。
4 结论
使用网格区域划分方法对移动目标进行定位,将不同时间段内的被干扰的信号,分为移动目标的初始信号与终端信号,并且当作整个运动过程来考虑,获得移动目标的精准定位。先通过分析煤矿井下各种设备产生多种干扰源,再根据不同时间段内,移动目标的信号频率变换情况,使用网格区域化处理,得出稀疏矢量,其矢量中的各要素与矿井巷道被划分的每个网格位置相互对应。为此,移动目标精确定位问题可以变换成该矢量稀疏求解过程,这属于一个经典的凸优化求解问题,可以用函数计算求出目标精确定位。实验表明,该方法能得到煤矿井下移动目标高精度定位,并且简化以前复杂计算过程,节省了大量时间,实现了移动目标快速、精准地定位。下一步的研究方向为静止目标与运动目标的统一精确定位。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
计算机仿真(2021年2期)2021-11-17
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
华人时刊(2021年23期)2021-03-08
作文新天地(初中版)(2019年6期)2019-08-15
科技创新导报(2016年30期)2017-03-15
科教导刊·电子版(2016年15期)2016-06-25
新高考·高一物理(2016年1期)2016-03-05
数字技术与应用(2014年12期)2015-05-04