基于Kinect的室内空间特征多层次布局仿真
2021-11-17 07:09李彦平
计算机仿真 2021年5期
李彦平,张 璐
(山西农业大学信息学院,山西 太谷 030800)
1 引言
室内空间布局的仿真对于提高人们生活质量方面发挥着巨大的作用,这是因为人们87%~90%的时间都生活在室内。室内空间特征布局仿真一直是相关学者研究的重点[1]。常规手段上,室内空间特征布局可以通过三维激光扫描仪或者传感器来完成,但是由于其聚类效果不佳,整体偏差达不到理想要求,导致数据精度较低。随着Kinect传感器的推出,对传统的室内空间特征多层次布局仿真产生了一定的冲击[2-4]。Kinect传感器能够以一定的频率获取室内场景的空间信息,同时以高分辨率输出RGB图像和红外深度图像[5]。在室内三维地图构建、室内空间仿真等研究领域中,Kinect设备的使用,能够帮助空间更好、更快速地建立,不仅使Kinect传感器得到了深入研究,而且使得空间重建等技术得到了更好的发展[6]。
在国内外研究中,室内空间特征多层次布局仿真方法更多的是为了提高收敛度和效率,但是精度不足。文献[7]提出了基于差异演化法的建筑空间布局规划方法,通过构建参数化snake曲线,得到建筑边缘的内部能量和外部能量。利用能量等函数,计算出边缘轮廓的变异概率和交叉概率,获取最大迭代次数,对高层建筑外部边缘空间布局进行了合理规划。该方法具有较强的收敛性,但是总体精度不足。文献[8]提出了基于输出结构模型的空间布局仿真方法,通过具有语义约束的多标签图割对非结构化点云进行全自动房间分割,将具有单个房间的点云的水平切片投影到平面上以形成二进制图像,进行线提取和正则化以生成平面图线,最后通过多标签图形切割构建出结构化模型,利用该模型进行室内空间布局,该方法在室内布局中有较高的效率,但是准确性仍然不足。
这两种仿真方法虽然已经比较成熟,但是面对复杂的空间结构,很难在保证空间布局合理的同时保证数据精度[9]。因此,提出基于Kinect的室内空间特征多层次布局仿真,解决上述传统仿真方法中存在的精度差的问题。
2 方法设计
2.1 空间点云数据获取
使用Kinect获取空间点云数据,Kinect在进行场景扫描时,由于遮挡或光线原因,可能存在数据缺失的情况,一般情况下是一些扫描不到的位置或扫描角度不正确。因此在扫描过程中需要调整Kinect设备的位置和角度,以Kinect为中心,建立局部坐标系,在此坐标系的支持下,采集室内空间数据。
Kinect设备在数据采集过程中,主要器件是深度摄像头,该摄像头采用光编码技术,主要利用深度传感器来采集室内空间位置信息,其内部将深度距离通过13位的二进制数表示[10]。假设从Kinect设备中采集到的深度图中的单个像素颜色信息是参数ξ,为16位数据。根据SDK文档中对像素信息的描述,在深度图像像素信息中,包含深度信息的是数据中的前13位,包含用户索引的是数据中的后3位[11]。当获取到Kinect的原始深度数据后,对获得的颜色信息和用户ID进行分割,保证数据前13位不变,后3位归0。经过SDK内部处理后,通过Kinect设备可以得到的0-4095之间的深度数据。一般情况下,将Kinect的原始数据右移三位就是获得当前像素的深度信息,这种深度信息反映了该像素点的真实世界距离。
通过Kinect采集的数据存在部分待修复区域,这种区域是空洞区域、监测不到的区域和影子区域,针对不同的区域,采用相对应的修复措施,得到较完整的深度数据。修复完成的数据不能直接使用在仿真模型建立中,因为在修复过程中会使图像边缘处出现一些深度连续的噪点,需要使用滤波器处理点云数据,将数据中的噪声去除掉,在完成滤波处理后,使用点云数据建立室内空间特征集合模型。
2.2 建立空间特征几何模型
通过以上过程获得的空间数据主要通过深度图像的形式展示出来,深度图像是二维图,考虑到空间特征主要由三维数据组成,在获取室内空间深度图像时,需要将深度图转换成真实世界中的三维空间点的关系。Kinect内部存在自动校正功能,能够实时校正深度和彩色摄像头,因此建立空间特征几何仿真模型的过程其实就是完成空间点到图像平面的投影。为了定量描述几何模型的建立过程,分别建立世界坐标系、摄像机坐标系、图像像素坐标系和物理坐标系[12]。如图1所示。
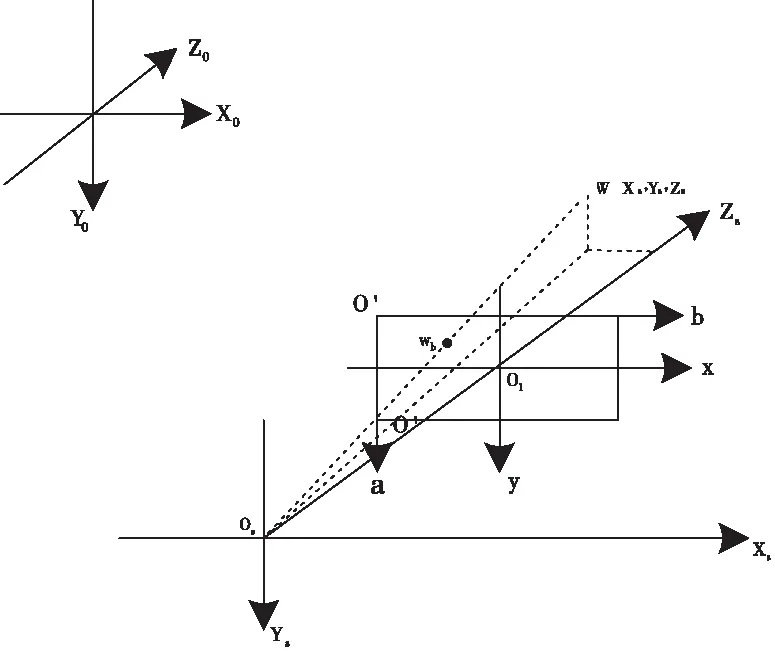
图1 摄像机成像模型
图中显示的(Os-XsYsZs)表示的是摄像机坐标系,(O1-xy)表示物理坐标系,(O0-X0Y0Z0)是世界坐标系, (O′-ab)表示图像像素坐标系。在图像像素坐标系下,每一个点的坐标都用以像素为单位的(a,b)来表示;在摄像机坐标系下,Zs表示摄像机光轴,Os原点为摄像机光心。默认O1在像素坐标中的坐标为(a0,b0),O1即是图像的中心点,又是物理坐标系的原点。x和y轴分别平行于摄像机坐标系Xs、Ys。世界坐标系下物点W在摄像机坐标系下的坐标是W(Xs,Ys,Zs),在仿真模型下的物理坐标系是wb(xb,yb)。假设通过Kinect获得的图像像素在a方向的物理尺寸是lx,在b方向上的物理尺寸分别是ly,由此可知,图像像素坐标系和物理坐标系的转换关系如式(1)、式(2)
(1)
(2)
世界坐标系和摄像机坐标系的转换关系如式(3)
(3)
式中Q表示3×3的旋转矩阵,T表示平移向量。在理想状况下,仿真模型下透视投影变换就是摄像机坐标系到物理坐标系的变化,其变换关系为
(4)
(5)
式中g表示转换向量,根据各坐标系之间的对应关系,得到物点w在世界坐标系与图像像素坐标系之间的转换关系,在计算过程中,将摄像机坐标系作为世界坐标系,得到Kinect数据中目标点对应的世界坐标系上的值,最终得到的Xs,Ys,Zs值为
(6)
式中α、β、a0和b0表示摄像机内部参数,利用式(6)即可完成深度图像像素点坐标到空间点三维坐标的转换,该坐标系以Kinect传感器作为世界坐标系原点。通过这种转换即可获得与室内空间深度图像相对应的仿真模型。
2.3 优化空间特征多层次布局
采用遗传算法求解室内空间特征多层次布局仿真模型,将空间特征多层次仿真模型作为种群,对种群进行初始化处理,通过式(7)计算出在整个种群中不同个体的适应度f(i)
(7)
式中K表示常数,Ui表示室内空间特征多层次布局策略,常数的引入是为了避免函数值的倒数与零接近。计算完成后,采用赌轮和精英个体保存策略完成遗传算子的选择,选择适应度比较高的个体。假设vi表示在种群适应度中个体被选中的概率,计算公式为
vi=f(i)∑i=1f(i)
(8)
假设Ri表示的是种群适应度中个体的累积概率,其计算公式为
Ri=∑j=1vi
(9)
结合式(8)和式(9)选择合适的遗传个体。假设vc表示的是交叉概率,其计算公式为
(10)

3 实验分析
3.1 实验准备
在室内空间特征多层次布局实验研究在Windows系统下,结合开源的第三方资源库PCL进行实验研究。 PCL架构如图2所示。
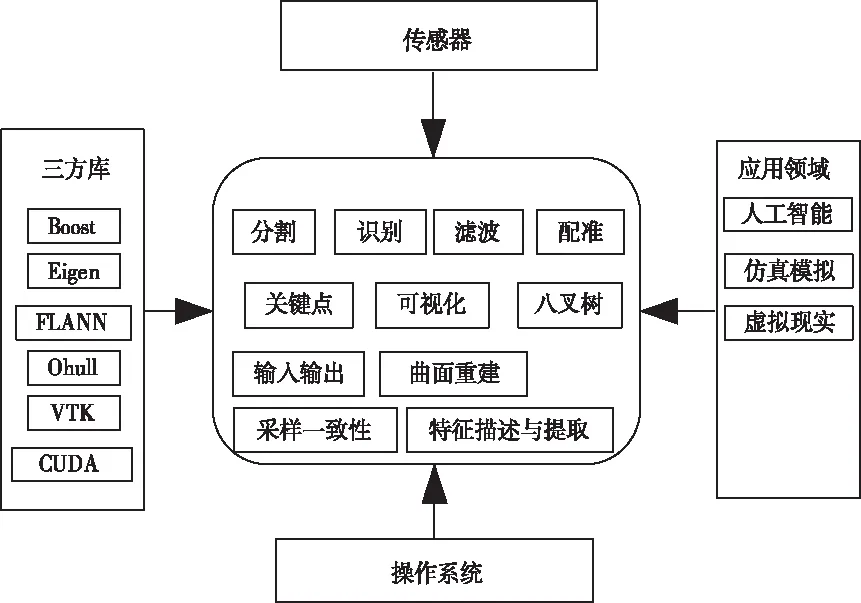
图2 PCL架构图
实验主要在室内进行,对于提出的仿真方法,使用Kinect获得不同方位下的点云图像,采用逐次两两配准的方式获得点云数据。在实验前,对数据进行配准,基于全局坐标系和某固定数据视角,对不同方位的点云数据进行配准,获得完整的仿真数据,使用这些仿真数据进行实验研究。
实验中主要以对比实验为主,对于另外两种仿真方法,使用激光扫描技术,以非接触式测量方式来获取空间多种精度、多层次的仿真信息。主要采用的激光扫描仪是FARO LSF 130,其最大扫面速度为5820rpm或97Hz,最高分辨率在10米距离的水平点间距可以达到0.9mm,测距范围为153.94m,在实验中结合FARO Scene软件处理相关数据。
实验中使用文献[7]方法及文献[8]方法作为对比方法,对仿真方法的数据精度进行验证,实验分为两项,分别是仿真模型整体偏差实验和空间特征数据聚类实验,根据这两组实验结果对比分析仿真方法的实际性能。
3.2 仿真模型整体偏差实验结果与分析
在偏差实验中,设定一个测量点位坐标作为参考,测量点位坐标原理如图3所示。
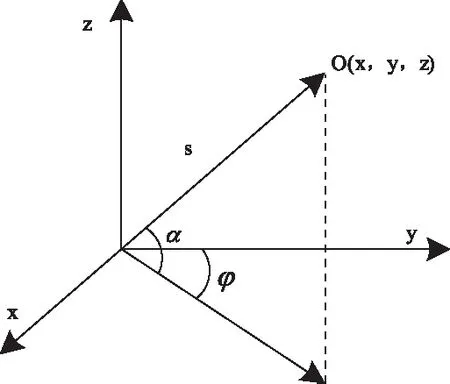
图3 测量点位坐标原理
使用式(11)计算三维坐标。
(11)
根据计算式(11)即可计算出待测点坐标分量误差和点位误差,具体计算过程如式(12)和式(13)

(12)

(13)
式中wy表示待测点在y方向的点位误差分量,wo表示待测点点位中误差,wx表示待测点在x方向的点位误差分量,wz表示待测点在z方向的点位误差分量,wα表示竖直测角中误差,ws表示测距中位差,wφ表示水平角测角中误差。根据以上计算过程,计算不同空间布局仿真方法的仿真模型整体偏差。具体实验结果如表1所示。
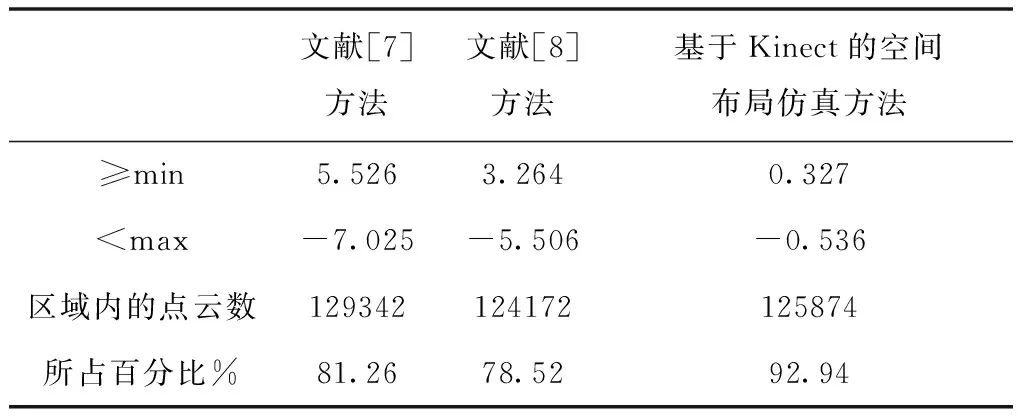
表1 仿真模型整体偏差计算结果
观察表中结果可以看出,不同的空间布局仿真方法在实验区域内的点云数据相差并不大,对于计算的偏差影响不大。实验结果中基于差异演化法的空间布局仿真方法偏差主要集中在-7.025~5.526范围内,占全部的81.26%;基于输出结构模型的空间布局仿真方法偏差主要集中在-5.506~3.264之间,占全部的78.52%;提出的基于Kinect的空间布局仿真方法偏差主要集中在-0.536~0.327范围内,占全部的92.94%:综上所述,提出的仿真方法偏差主要集中在极小的范围内,在其它范围内存在较大偏差的可能性极小,提出的基于Kinect的室内空间多层次布局仿真方法准确度更高。
3.3 空间特征数据聚类实验结果及分析
在空间特征数据聚类实验中,主要是验证不同仿真方法的数据的精度,数据聚类效果越好,其数据精度越高,对仿真过程的负担越小,仿真结果越可靠;反之,数据聚类效果越差、数据精度越低,仿真结果可靠性差。使用第三方软件输出仿真数据聚类结果,依据结果对比分析不同的仿真方法,具体结果如图4-6所示。
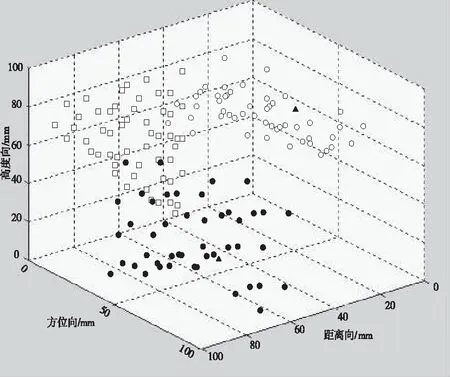
图4 差异演化法的空间布局方针方法实验结果
对比观察图中结果可以看出,基于差异演化法的空间布局方针方法不同特性数据之间杂糅在一起,没有明显的分割边界;基于基于输出结构模型的空间布局仿真方法各个不同不同特性的数据之间分散比较明显,但是数据比较散乱并不集中;基于Kinect的空间布局仿真方法中不同特性数据聚类明显,没有杂糅的情况。结合仿真模型整体偏差实验结果可知,提出的基于Kinect的室内空间特征多层次布局仿真方法仿真模型整体偏差小、数据聚类效果好,其数据精度高,该方法优于传统的仿真方法。
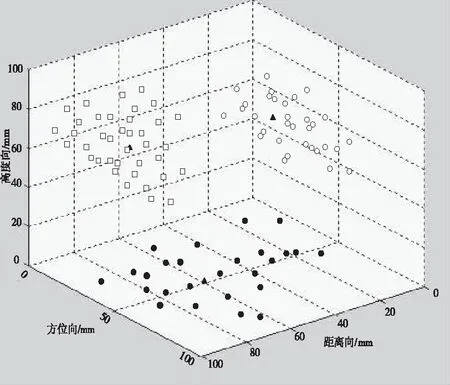
图5 基于输出结构模型的空间布局仿真方法实验结果
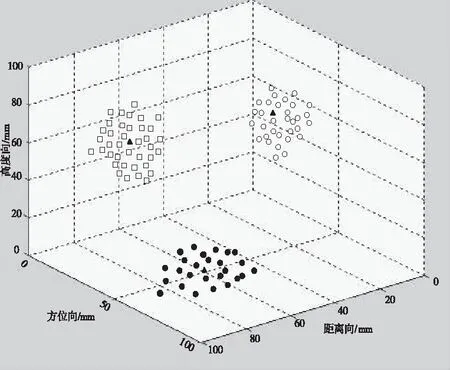
图6 基于Kinect的空间布局仿真方法实验结果
4 结束语
围绕室内空间特征多层次布局展开深入研究,在原有的文献资料的支持下,提出基于Kinect的室内空间特征多层次布局仿真,在完成整体仿真后,通过多项对比实验验证了提出的仿真方法具有更高的数据精度。虽然本文完成了室内空间特征多层次布局仿真,但是受到时间的限制,很多想法未来得及实现,在后续研究中将继续深入和完善空间特征布局仿真。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
青年文学家(2022年2期)2022-03-17
科技信息·学术版(2022年8期)2022-02-25
现代电子技术(2021年18期)2021-09-23
现代电子技术(2021年8期)2021-04-21
语数外学习·高中版中旬(2021年11期)2021-02-14
喜剧世界·中旬刊(2020年8期)2020-09-10
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国文化遗产(2016年5期)2016-12-14