基于VR 技术的室内空间布局三维模拟成像系统设计
2021-04-21 12:47杨曙光
现代电子技术 2021年8期
杨曙光
(徐州工程学院,江苏 徐州 221000)
0 引 言
室内空间布局作为高层视觉图像布局分析领域内具有高难度的研究热点之一,通过室内空间陈列的材料、采光与颜色实施综合搭配的设计过程[1⁃2],准确分析室内空间布局,为智能家居、机器人导航等领域的研究提供高精度三维立体空间结构信息[3]。而三维立体空间常常与虚拟现实(VR)技术相关,该技术是一种能够建立并感受虚拟世界的多传感器结合以及多媒体组合的计算机技术[4],通过计算机模拟构建虚拟世界的三维空间,为使用者提供多感官体验。
随着VR 技术与场景仿真技术的研究与成熟,综合图像色彩渲染的室内空间布局三维仿真技术呈现出极具优势的应用前景[5]。由此设计基于VR 技术的室内空间布局三维模拟成像系统,在3ds MAX 与相关标准编辑系统内进行室内空间布局三维模拟成像研究,并构建室内空间布局仿真模型。
1 室内空间布局三维模拟成像系统
1.1 系统整体结构设计
基于VR 技术的室内空间布局三维模拟成像系统利用颜色特征分析方法及光线追踪方法进行室内空间布局的智能判断,生成室内空间布局的三维模型,通过VR 技术进行三维立体的智能成像。图1 为基于VR 技术的室内空间布局三维模拟成像系统整体结构。

图1 系统整体结构
系统由室内空间布局平面图像采集模块、平面图像预处理模块以及VR 三维模拟成像模块共同组成[6]。空间布局平面图像采集模块利用鱼眼相机及相关电子学单元采集室内空间布局平面图像,经由平面图像预处理模块进行分辨率调整与模板拼接等预处理后[7],传输至VR 三维模拟成像模块内。
VR 三维模拟成像模块采集室内空间布局陈列的视觉特征,包括颜色信息、坐标信息及采光角度等,以SoftImage 和Light Wave 3D 等软件为基础,构建室内空间布局几何模型,再现室内空间布局的材质效果、颜色搭配以及光纤追踪等效果。
1.2 室内空间布局平面图像采集模块设计
鱼眼相机同关联电子学单元共同组成室内空间布局平面图像采集模块,该模块选取一体化设计模式[8],其数据采集与缓存如图2 所示。
4 部鱼眼相机并行运行下,室内空间布局平面图像采集模块采用CMOS APS 传感器,其具有高分辨率、高集成度、高灵敏度等特征。各鱼眼相机采集的室内空间布局图像通过实时在线拼接以及动态视频压缩等处理后缓 存至SRAM 内[9]。
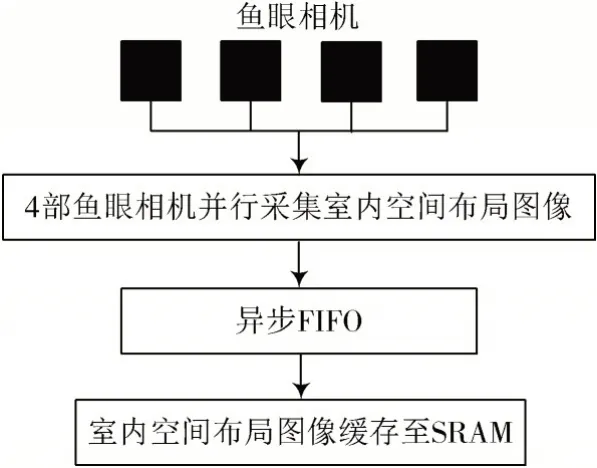
图2 室内空间布局平面图像采集模块数据采集与缓存
1.3 VR 三维模拟成像模块
1.3.1 室内空间布局视觉信息采集
室内空间布局视觉特征采集的主要功能是为明确鱼眼相机获取的室内空间布局平面图像与三维点间的相应关系[10],获取相应的颜色信息(包括自身颜色与光线照射),基于三维视觉进行室内空间标定。
1)光影效果
光影效果是通过物体与反射镜面间位置的变换产生的一种光线明暗效应。在光影变换过程中,传感器平面与反射镜面间的相关性为:

式中:δ和p分别为匹配系数和室内空间坐标;Y″和E″分别为反射镜面与传感器平面;T为空间点与反射镜面间的距离;j( ⋅ )和d( ⋅ )分别为室内空间布局陈列的视觉视差函数和光线变换线性重组方程;h″为成像平面内任意点与平面中心点间的距离;P和M分别为空间点中心坐标与射影图像矩阵。
式(2)为鱼眼相机成像平面与室内空间布局平面间的相关性:

在式(1)内引入式(2),即可获取:

由于鱼眼相机的双曲面存在两侧对称特性[11],利用式(3)描述函数f,得到:

式内ɑn为室内空间视点的入射角。
利用鱼眼相机获取室内空间布局平面图像时受器件质量等外界因素影响有较大概率出现偏差[12],需将含有偏差的非理想成像模型转换为式(5),满足成像模型需求。

2)颜色分析
标定室内空间过程中,基于鱼眼相机360°获取的室内空间布局全景二维图像,构建三维室内空间点与二维成像像素间的相关性,并求解。
确定室内空间相关参数后,构建二维成像图像平面像素点同图像入射点间的相关性,公式描述如下:

室内空间标定条件下,初步获取空间内点的三维坐标,提取室内空间三维景象内的颜色信息与坐标信息,公式描述如下:

式内g描述空间点与坐标原点间的远近。
1.3.2 3D 几何建模尺度信息参量
三维几何建模主要是基于视觉特征采集结果,在3ds MAX 软件内构建室内空间布局陈列的三维模型[13]。空间布局陈列形状特征提取表达式如下:

以图像属性特征为基础的室内空间陈列光学成像三维配准,通过渲染获取具有高级别质感的成像效果[14],完成室内空间陈列的色彩、光线、形态以及图案之间的三维配准。选取分离面裁剪法生成室内空间陈列的多层级细节,依照属性值判断颜色配准精度,判断函数表达式如下:


式中:l和L分别描述全息投影像素值和室内空间分布轮廓总长度
利用式(11)得到3D 几何建模尺度信息参量,通过该参量可为三维模型的构建提供数据,以此生成三维模拟形象。
2 实验分析
为了验证本文设计的基于VR 技术的室内空间布局三维模拟成像系统使用性能,以某写字楼为实验对象,实验对象底部为商业空间,中上部则为办公空间与居住空间。采用本文系统对实验对象中的三类室内空间布局进行三维模拟成像仿真,结果如下。
2.1 实验环境
实验过程中,本文系统研发平台如表1 所示。

表1 系统研发平台
作为接口程序的OpenGL 内包含简单的点、线绘制函数和复杂的曲线曲面绘制函数等,供室内空间布局建模使用。Direct 3D 是Direct X 多媒体编程接口的重要组成部分,是一个用于3D 绘图的编程接口,可隐藏不同三维加速硬件相异性。
2.2 三维模拟成像结果
在上述实验环境中,采用本文系统分别对实验对象的室内办公空间、居住空间和商业空间进行空间布局三维模拟成像,结果如图3 所示。

图3 室内空间布局三维模拟成像结果
由图3 可知,采用本文系统能够有效实现室内空间布局进行三维模拟成像,且成像效果较好,具有较明显的视觉冲击力,颜色和光线的设计与使用自然协调,可美化视觉效果。高实用性的空间布局与协调自然的颜色和光线设计说明本文模型应用性能较好。
2.3 室内空间布局标定实验
对实验对象进行空间标定,选取实验对象中的居住空间,将鱼眼相机放置在不同的4 个方位中,针对空间布局中某任意位置的一项陈列物品计算其摄影矩阵元素,反复计算若干次,取其均值。表2 为摄影矩阵元素实验数据。
由表2 得到,矩阵元素的稳定性较高。采用本文系统分别标定4 个不同位置下实验对象中陈列物品的空间方位,结果如表3 所示。
由表3 中描述不同摄影位置下实验对象内陈列物品在空间内的X坐标与Y坐标数据可知,本文系统对于室内空间布局的标定与其他两个对比系统相比定位精度较高,说明本文系统具有可靠性。

表2 矩阵实验数据

表3 空间定位实验结果
2.4 性能对比
根据表3 内三个系统实际模拟出的实验对象空间布局三维图像,对比不同系统模拟效果的时间开销与信息饱和度等相关参数,对比结果如表4 所示。

表4 性能对比测试结果
由表4 可得,采用本文系统进行室内空间布局三维模拟成像的信息饱和度与归一化均方根误差远优于其他两个系统,而时间开销对比结果也存在一定优势,说明本文系统特征描述能力较高,可获得较好的视觉效果,且具有一定效率优势。
3 结 论
本文研究室内空间布局模拟成像问题,设计基于VR 技术的室内空间布局三维模拟成像系统,其中,VR三维模拟成像模块基于室内空间布局视觉特征构建室内空间布局3D 几何模型,呈现室内空间布局模拟成像结果。实验结果显示,利用本文系统进行室内空间布局三维模拟成像,室内空间布局的标定精度高,特征描述能力较强,可获得较好的视觉效果,且具有一定效率优势,应用前景广阔。
猜你喜欢
中国钱币(2022年2期)2022-10-25
北京航空航天大学学报(2022年8期)2022-08-31
中国钱币(2022年1期)2022-08-23
青年文学家(2022年2期)2022-03-17
河北画报(2021年2期)2021-05-25
紫禁城(2020年8期)2020-09-09
中国博物馆(2019年3期)2019-12-07
摄影之友(影像视觉)(2018年6期)2018-07-06
饮食与健康·下旬刊(2017年1期)2017-02-08
灯与照明(2016年4期)2016-06-05