人机共驾智能车辆车道偏离横向辅助控制仿真
2021-11-17 08:38阿比拉涅刘晓辉
计算机仿真 2021年5期
阿比拉涅,郑 晟,刘晓辉
(清华大学汽车安全与节能国家重点实验室,北京 100084)
1 引言
在现代社会,车辆几乎成为每个家庭的基本必备出行工具,导致压力过大,交通事故频发。交通事故已经是现当代威胁着人身安全的最大隐患之一,酒驾、超载超速、无证无牌、以及不恰当的操作驾驶等所引发的交通事故,时时刻刻都威胁着人们的生命安全[1]。随着科学技术的发展,车辆互联网时代已经来临,但是现有的技术并不能完全支撑无人自动驾驶,因此现阶段的自动驾驶主要为人机共驾,即以辅助驾驶技术来帮助驾驶员在一定程度上控制车辆,完成行驶运动[2]。在辅助驾驶技术的应用中,纠正车道偏离问题是其中一个关键问题。很多交通事故的发生都是因为车道偏离正常轨迹而导致的,因此如何有效的控制车辆一直保持在正常车道行驶范围内运动成为研究的重点。
关于车辆车道偏离控制的研究众多学者做了大量研究,文献[3]根据横向预瞄距离,通过驾驶员决策评估系统对驾驶员输入的转角进行修正,从而实现车道偏离自动改正;张海林等提出基于EPS系统的车道保持控制模型,解决了EPS部件与车道保持执行部件之间的协调问题。文献[4]设计了基于视觉预瞄的车道保持嵌套PID转向控制器,利用PID算法的智能性,自动得出车道偏离误差,根据误差不断优化控制策略,实现车道偏离辅助控制;文献[5]提出了两层驾驶员转向预测模型,即通过一层的路径跟踪结果控制另一层驾驶员转向操作,实现了车道偏离纠正。文献[6]提出一种基于驾驶行为预测的车辆横向辅助控制策略研究,即通过事先判定车道偏离,综合驾驶行为预测结果以及驾驶员特性,实现主动转向控制。
在前人研究的基础上,人机共驾智能车辆车道偏离横向辅助控制仿真研究。该研究分为两部分,第一部分采集信息,判断车辆是否发生轨道偏离问题,实现偏离预警;第二部分根据预测结果,触发控制程序,实现车辆车道偏离横向辅助控制。通过本研究以期提高车辆行驶安全性,减少交通事故的发生。
2 人机共驾智能车辆车道偏离横向辅助控制方法
人机共驾是车辆发展的一个新阶段,该阶段处于人员驾驶和无人驾驶之间的过渡时期,其特点如表1所示。
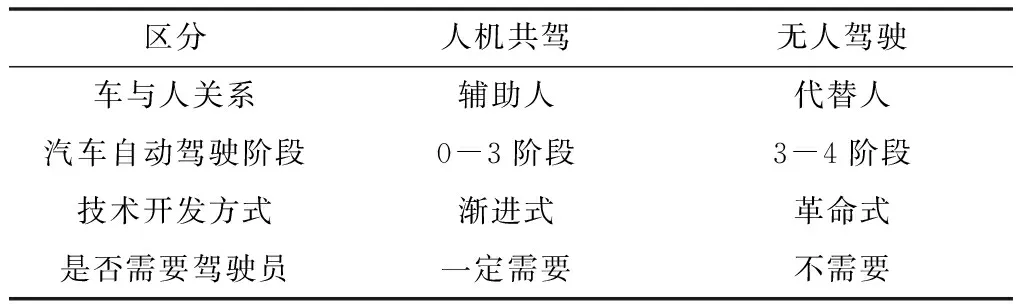
表1 人机共驾与无人驾驶对比
无人驾驶以目前技术还无法实现,风险性较高,因此辅助驾驶技术是智能车发展的重要组成部分。在现代驾驶安全调查中,车辆偏离正常的行驶车道是导致交通事故发生的主要原因之一,因此让车辆一直保持在正常的车道是辅助驾驶技术的关键任务之一。为此,进行人机共驾智能车辆车道偏离横向辅助控制方法研究。
2.1 智能车辆车道偏离判断
车道偏离横向辅助控制的前提和基础是对车辆是否发生车道偏离进行判断,即判断车辆运动轨迹与期望轨道的误差是否小于车辆安全行驶允许的阈值。车道偏离判断过程主要分为两个阶段任务,即车道线识别与跟踪,偏离判断[7]。下面进行具体分析。
第一阶段任务:车道线识别与跟踪。
车道偏离是指车辆行驶不在车道线规定的范围内,因此车道线的识别与跟踪至关重要。车道线识别与跟踪具体流程如下:
步骤一:在车辆上布置摄像头,采集序列图像信息。
步骤二:对采集到序列图像进行预处理,包括灰度化、图像滤波、车道线边缘点筛选。
步骤三:消失点检测,即从车道线特征图中检测出车道线特征点。
步骤四:根据检测出来的消失点,对图像进行剪裁操作,获取感兴趣区域;
步骤五:在感兴趣区域内,采集车道边缘线中的四点位置;
步骤六:进行置信度判断和车道宽度信息补充存在模糊、阴影或车辆遮挡等情况下的车道线,实现车道线的检测;
步骤七:车道线跟踪。根据识别出来的车道线,在下一帧图像中再次识别出车道线,即车道线跟踪。在这一环节采用卡尔曼滤波跟踪方法来实现车道线跟踪操作[8]。
第二阶段任务:偏离判断。
在这一阶段,选择一种车道偏离算法进行车道偏离判断,实现偏离预警。目前,车道偏离算法主要有以下几种,如表2所示。
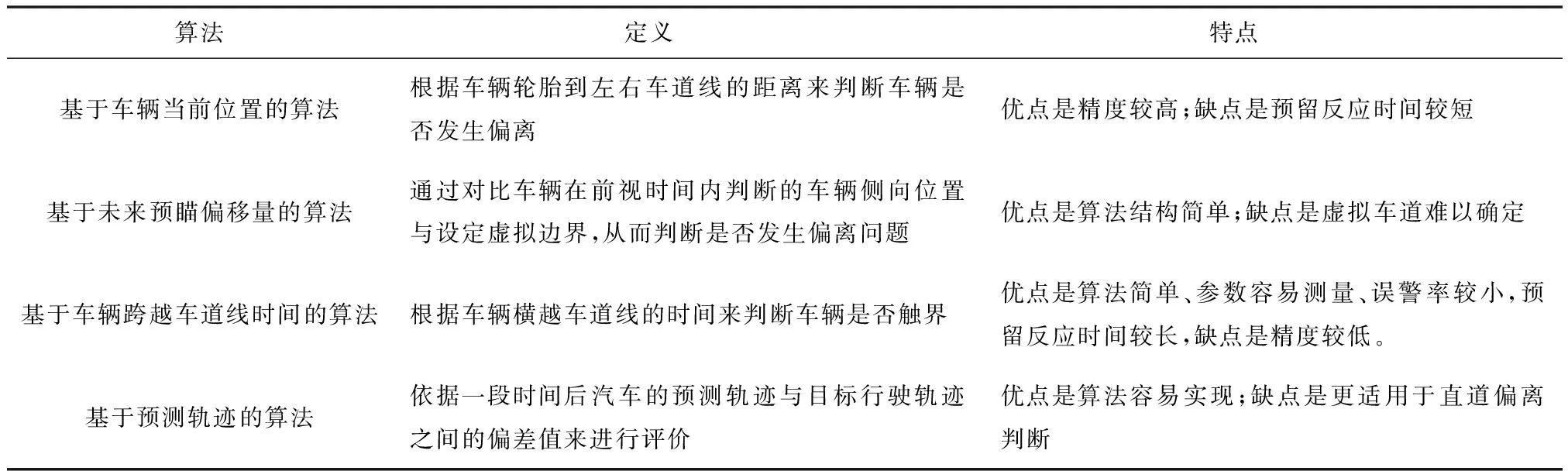
表2 车道偏离算法对比表
通过上述表2可知,每种车道偏离算法都存在一定的缺点,因此在这里将基于车辆当前位置的算法和基于车辆跨越车道线时间的算法结合在一起,进行车道偏离判断。原理公式如下

(1)
其中,

(2)

(3)
式中,SCCP代表基于车辆当前位置的算法输出结果;STLC代表基于车辆跨越车道线时间的算法输出结果;dL代表车辆左轮到左侧车道线的横向距离;dR代表车辆右轮到右侧车道线的横向距离;TCCP代表距离阈值;tTLC代表横越车道线的时间;TTLC代表时间阈值。
2.2 车辆车道偏离横向纠正
基于上述章节研究,当存在偏离趋向时,及时向控制系统发出预警信号,触发车道保持横向控制程序,将偏移及时纠正过来,使其回到安全范围,保证车辆行驶安全,这是本章节研究的目标和任务[9]。
2.2.1 智能车辆模型和驾驶员模型
在车辆车道偏离横向辅助控制中,其算法依赖车辆系统模型和驾驶员模型,因此在控制算法实施前需要建立合适的车辆模型和驾驶员模型,前者的作用是确定期望的车辆运动状态,后者的作用是获取所需的最优方向盘转角[10]。车辆系统模型方程公式如下
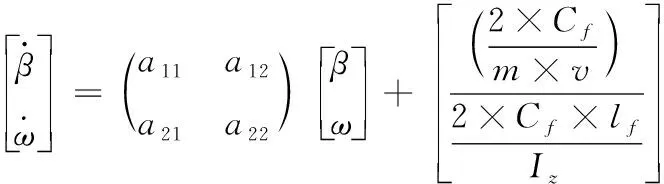
(4)
其中
(5)

(6)

(7)

(8)
驾驶员模型

(9)
Lp=uTp
(10)
公式中,车辆系统模型和驾驶员模型各个参数如下表3所示。
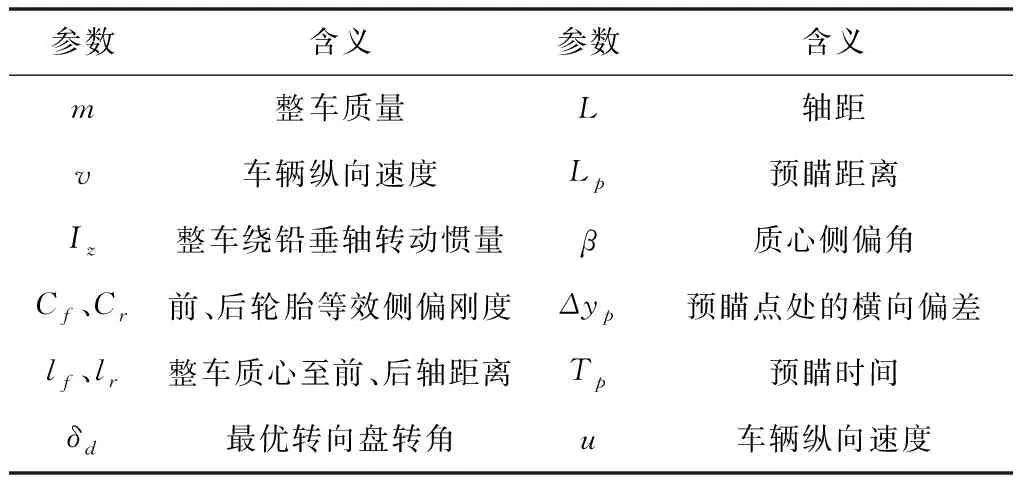
表3 车辆系统模型和驾驶员模型参数说明
2.2.2 基于转向和制动的可拓联合横向辅助控制
电动助力转向控制和差动制动控制都是车辆车道偏离横向辅助控制的重要算法。其中,前者控制思路是通过偏离检测,判断是否发生偏离问题。当发生偏离时,进行预警并输出控制信号,自动控制车辆方向盘转动,使得车辆横向位置偏差维持在规定的范围内,将车辆调回车道正轨[11]。在这一过程中,关键在于BP神经网络 PID 控制器的作用。通过驾驶员模型得到最优方向盘转角,然后将其输入到BP神经网络PID控制器当中,经过BP神经网络PID控制器运算,得到目标辅助转矩,最后结合驾驶员实际的操作转矩和车辆相对于车道中心线的横向位置偏差实现人机协调控制。后者控制思路是首先基于驾驶员模型确定期望的车辆运动状态,也就是理想的横摆角速度,然后同样将理想的横摆角速度作为BP神经网络PID控制器的输入,经过运算,得出理想的横摆力矩,最后将这一参数合理分配给车辆的四个车轮,通过制动系统控制车辆回到正常车道[12]。
虽然以上两种方法都能实现对车辆偏离的控制,但是这两种方法都很难适应多种工况下的控制要求,电动助力转向控制更适用于直道时的偏离纠正,而差动制动控制更适用于弯道时的偏离纠正。为此,将二者结合在一起,提出一种可拓联合横向辅助控制方法。该方法是根据路面附着系数和方向盘初始转角。将可拓集合分为四个区域,即经典域、可拓域和非域。每个区域采用不同的控制策略如下表4所示。
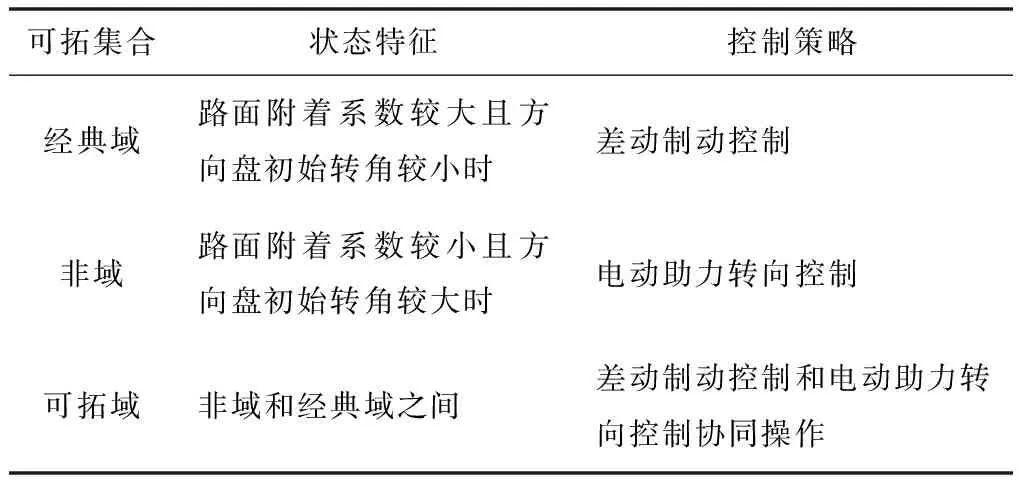
表4 可拓联合横向辅助控制策略
搭建的基于车辆当前位置和基于车辆跨越车道线时间的车道偏离联合预警模型,如图1所示,利用搭建的模型进行车辆偏离模拟判断。
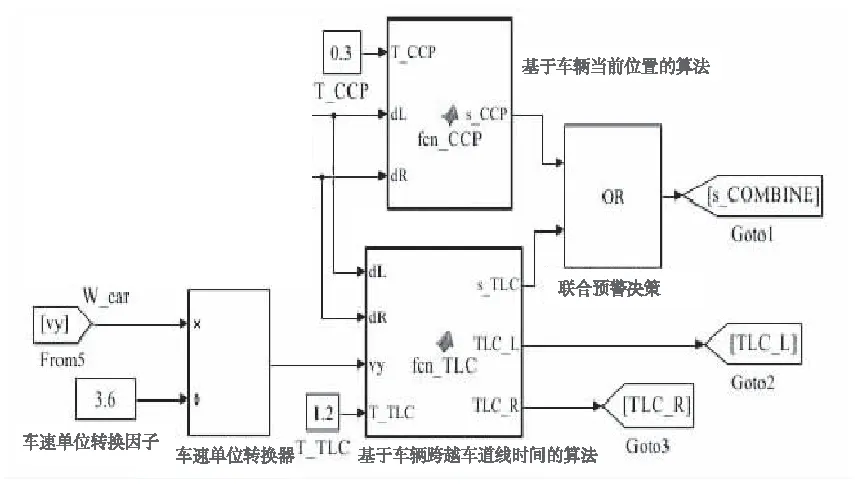
图1 车道偏离预警模型
可拓联合横向辅助控制原理方程如下:
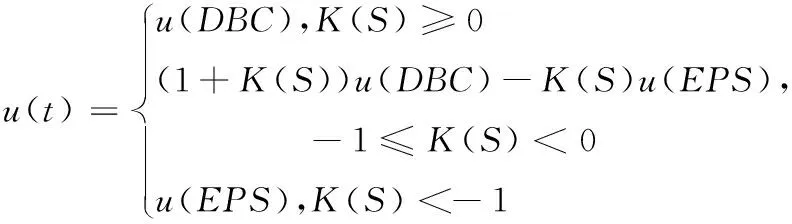
(11)
式中,u(t)代表控制器输出;u(DBC)代表差动制动控制输出;(1+K(S))u(DBC)-K(S)u(EPS)代表差动制动控制和电动助力转向控制协同操作下的输出;u(EPS)代表电动助力转向控制输出;K(S)代表特征状态S所得的关联函数值。
3 仿真分析
3.1 智能车辆偏离工况设置
以CarSim为工具,以采集到的信息为基础,利用仿真软件CarSim和Matlab搭建智能车辆系统模型和驾驶员模型。所需要的基础数据具体如表5所示。
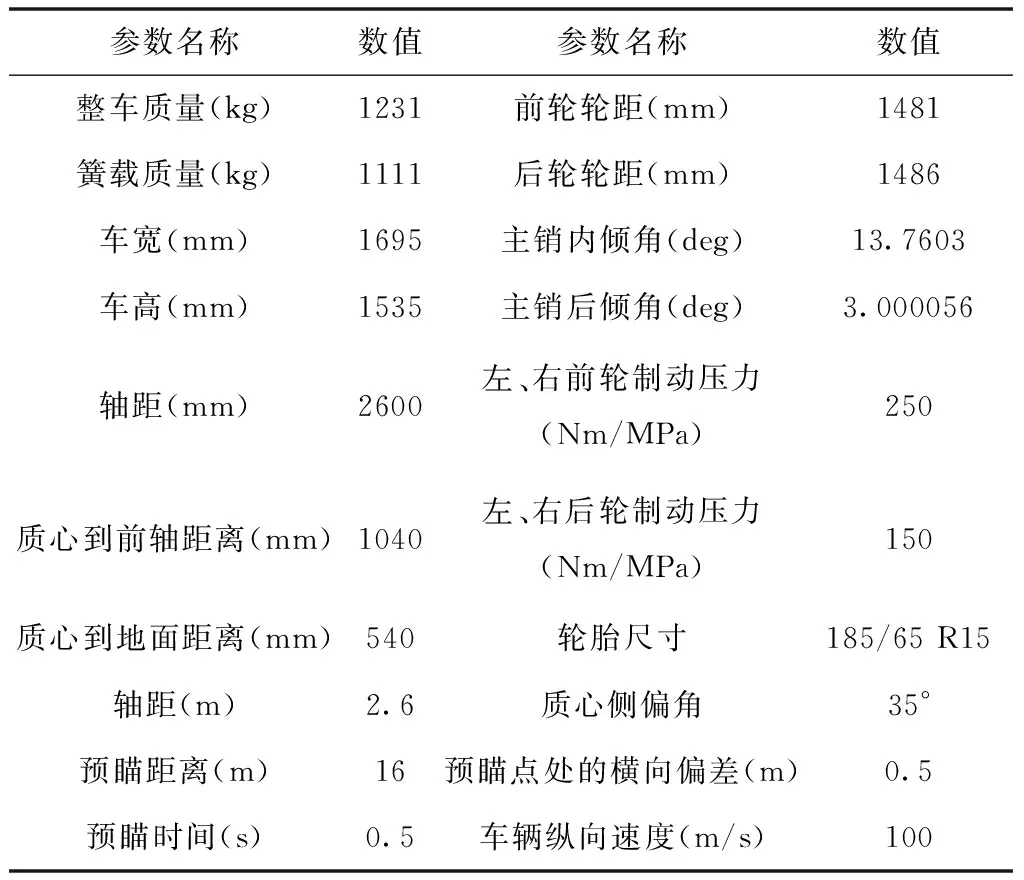
表5 智能车辆信息
3.2 横向控制试验环境搭建
使用基于 Car Sim-RT、Matlab/Simulink 以及实时仿真系统 dSPACE 搭建横向控制试验环境,如图2所示。
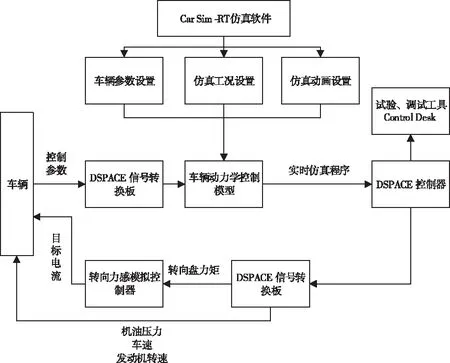
图2 横向控制试验环境
3.3 实验结果分析
本仿真设立的车辆偏离工况有两种,即直道偏离仿真工况和弯道偏离工况。两种工况下,车辆以30 m/s的车速,在路宽为3.5 m上行驶。行驶一段时间后,模拟车辆发生车道偏离。具体工况情况如图3和图4所示。
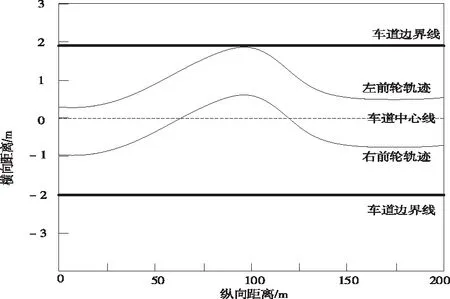
图3 直道偏离仿真工况预设轨迹示意图
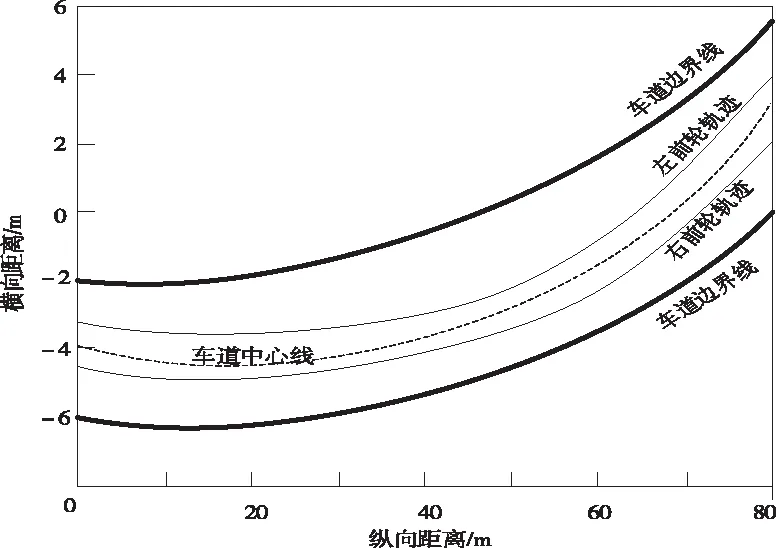
图4 弯道偏离工况预设轨迹示意图
由图3和图4可知,本文方法在直道和弯道行驶时按照正常轨迹行驶,能够对车辆是否发生车道偏离进行精准判断,判断车辆运动轨迹与期望轨道的误差是否小于车辆安全行驶允许的阈值。利用转向反应时间(SRT)、车道偏离持续时间(DLE)、最大转向角速度(MSS)与最大横向偏离量(MDLC)四个指标进行控制效果评估,如图5所示。
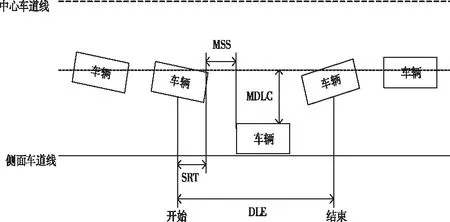
图5 控制方法评价指标示意图
在相同仿真条件下,利用文献[3]方法、文献[4]方法、文献[5]方法以及文献[6]方法作为对比项,进行仿真控制,并与所研究方法控制效果进行对比,如表6所示。
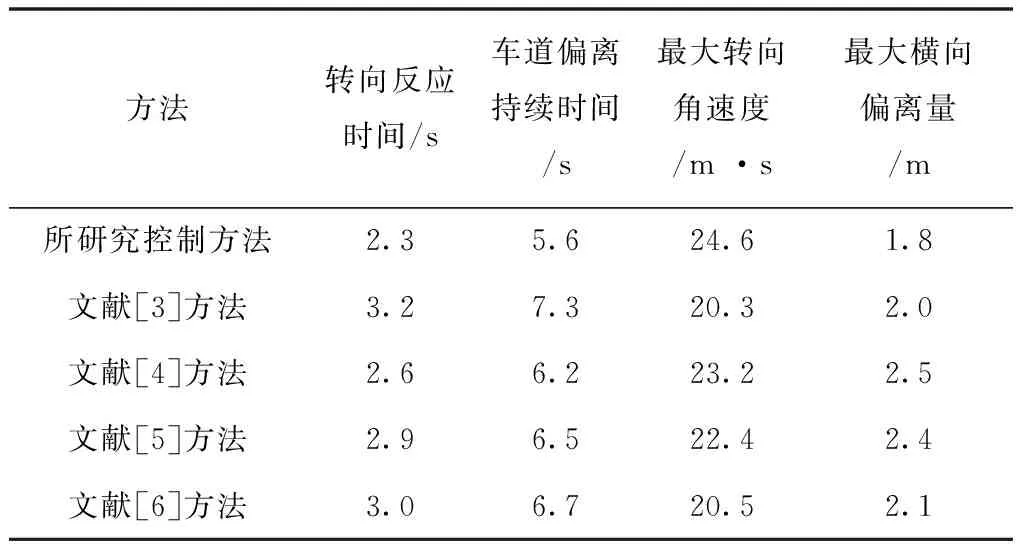
表6 控制指标统计结果
从上述四个控制指标统计结果可以看出,与文献[3]方法、文献[4]方法、文献[5]方法以及文献[6]方法相比,所研究方法应用下,表现更好,控制效果更佳。
4 结束语
随着道路上车辆的增多,交通事故频发,因此为减少事故发生率,提高驾驶安全,进行车道偏离辅助控制具有重要的现实意义。为此,针对人机共驾智能车辆,进行车道偏离横向辅助控制仿真研究。该研究通过基于转向和制动的可拓联合控制改善了车辆偏移控制效果,但是本研究仅在仿真环境中进行了测试,实际驾驶环境要更为复杂,因此该方法有待进一步研究和分析。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
卫星应用(2021年11期)2022-01-19
南都周刊(2021年3期)2021-04-22
英美文学研究论丛(2020年2期)2020-02-06
知识就是力量(2017年3期)2017-03-21
中学科技(2015年11期)2015-11-25