基于FLC-ECMS的FCHEV能量管理策略
2021-11-17 07:08刘永飞付主木陶发展
计算机仿真 2021年5期
刘永飞,付主木,陶发展
(河南科技大学信息工程学院,河南 洛阳 471023)
1 引言
燃料电池混合动力汽车(Fuel Cell Hybrid Electric Vehicle, FCHEV)作为最具有潜力的新能源汽车之一,具有能量转化效率高、无污染、低噪声等优点,在新能源汽车领域具有广阔的应用前景[1]。燃料电池具有输出特性软、动态响应慢、不能回收再生制动的能量等缺点,为了弥补燃料电池的不足,多采用燃料电池为主,电池或超级电容为辅的混合动力驱动模式。能量分配作为复合电源能量管理的关键,对降低能耗,提升电池使用寿命等方面有重要作用。因此,怎样对多能量源进行能量分配,提高燃油经济性,有效延长电池寿命,已成为当今研究的热点[2]。
采用燃料电池、电池和超级电容组成的三能量源控制系统,不仅可以克服双能量源的局限性,还能够提升整车动力性。针对三能量源的能量分配问题,Waleed等[3]设计了基于基因遗传算法的H无穷控制器,依据需求功率频率分离进行功率分配,实现能量分配同时保证了系统稳定性和鲁棒性。Fei,Ahmadi和Peng等[5-7]都提出了基于多目标优化的模糊控制(Fuzzy Logic Control, FLC)能量管理策略,将相应的多目标约束加入到模糊控制器中,实现了多能量源协调分配,同时提升了系统鲁棒性和燃油经济性,但这种方法由于模糊控制的局限性,难以保证耗氢量的精确性。为了使氢能源消耗最小,Hong,Han和Zhang等[8-10]提出了基于电池荷电状态(State of Charge, SOC)自适应等效因子的等效消耗最小能量控制策略(Equivalent Consumption Minimization Strategy, ECMS),实现了多能量源功率分配,保持了电池SOC一致性。对此,Li和Motapon等[11-12],建立了基于电池和超级电容SOC值的惩罚函数,将其加入到ECMS,在进行能量管理的同时,保证了超级电容SOC一致性和提升了超级电容利用率,但这种策略未充分考虑需求功率波动对燃料电池和电池使用寿命的影响。
基于以上分析,可发现同时对三个能量源功率进行合理分配,对提升整车动力性和效率具有重要作用。针对提升等效氢量的精确性和降低需求功率波动对电池和燃料电池使用寿命的影响,设计了分层能量管理策略。采用等效氢消耗最小控制策略,设计SOC一致性变等效因子,保证燃料电池最优功率的输出;同时,为保证电池充放电平稳性延长电池使用寿命,采用模糊控制策略,提高超级电容的利用率,优化电池和超级电容功率分配。
2 燃料电池混合动力系统结构
本文采用燃料电池、电池和超级电容组成的FCHEV为研究对象,系统结构如图1所示,燃料电池连接一个单向DC/DC变换器并联到直流母线上,电池和超级电容各连接一个双向的DC/DC变换器并联到直流母线上。燃料电池作为主能量源,为整个系统提供能量,电池作为能量缓冲器,为能量源的充放电起缓冲作用,超级电容作为能量的响应器,对需求功率变化作出快速响应。利用能量存储系统调节燃料电池工作在高效区的最优功率输出,并吸收再生制动能量,提高整车燃油经济性。
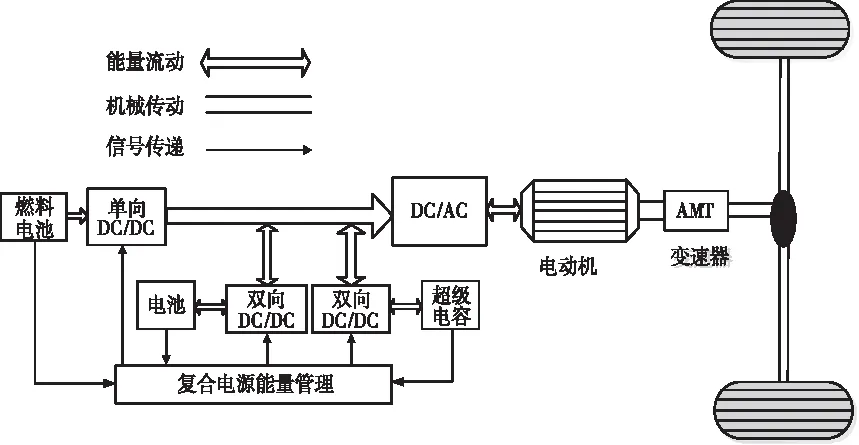
图1 FCHEV系统结构图
2.1 燃料电池工作特性分析
作为整个系统能量来源,为了降低燃料电池氢能源消耗,需要燃料电池工作在高效区,本文使用的燃料电池最大输出功率为25kW,燃料电池输出功率效率图如图2所示,粗黑色曲线部分划定为燃料电池高效区,Pfc_min和Pfc_max分别是燃料电池功率高效区的最小值和最大值。
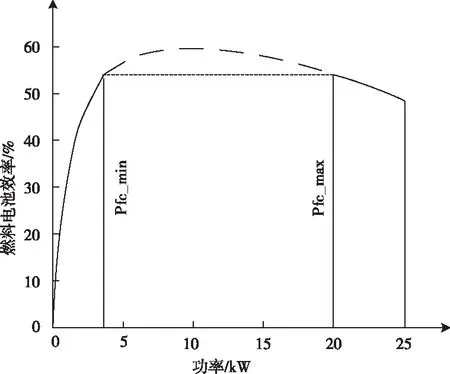
图2 燃料电池工作特性效率图
2.2 电池工作特性分析
作为能量缓冲器,电池具有能量密度大、功率密度小的特性,能够对需求功率的波动起到缓冲调节作用,较大的功率波动和快速SOC变化会严重降低电池的使用寿命,电池的SOC计算如式(1)

(1)
式中,SOCbat(t)为t时刻电池的SOC值,SOCb_init为电池SOC初始值,Cnom为电池额定容量,ηb是电池充放电效率。
2.3 超级电容工作特性分析
超级电容作为能量的响应器,具有能量密度小、功率密度大的特性,可循环充放电次数多,能够快速响应需求功率波动,提升整车动态性能。超级电容SOC状态与系统动态性能密切相关,其SOC值可以用电压来表示[12-13], 如下
(2)
式中,SOCsc(t)为t时刻超级电容SOC值,Voc(t)为t时刻超级电容开路电压,Vmin为超级电容最小电压值,Vmax为超级电容最大电压值。
3 FCHEV能量管理策略设计
通过分析燃料电池、电池和超级电容的稳态工作特性,确定三个能量源的动态工作模式,为了减少氢能源消耗,延长电池使用寿命,降低能量源控制难度,设计能量管理策略如图3所示,采取等效消耗最小控制策略,主要优化燃料电池功率输出;采取模糊控制,优化电池和超级电容功率输出。
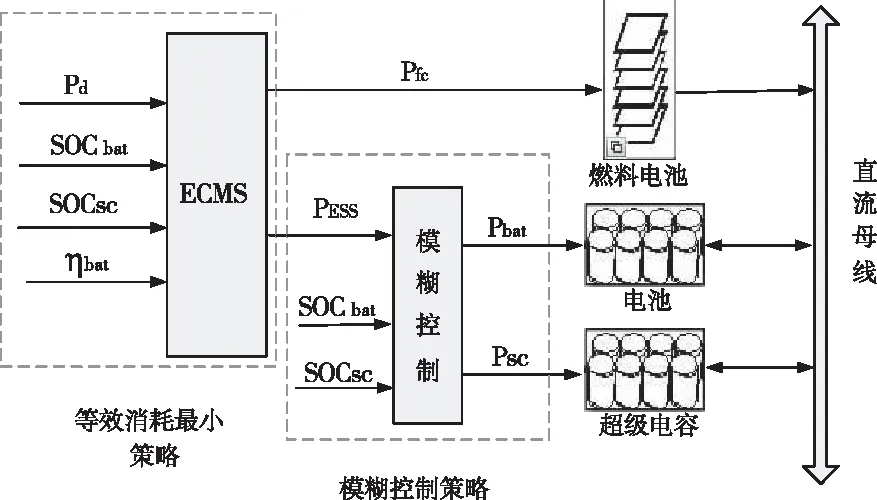
图3 分层能量管理结构图
3.1 等效氢消耗最小控制策略设计
在燃料电池混合动力系统等效消耗最小策略设计中,整车所有的能量直接或间接来源于氢气,电池和超级电容的充放电需要按照一定的规则等效为氢气的消耗,为了使系统瞬时消耗氢气最少,需要将整车能量的消耗等效为氢气的消耗,建立的目标函数如式(3)
J=min(Cfc+Cbat+Csc)
(3)
式中,Cfc表示燃料电池消耗氢气的量,Cbat表示电池等效消耗氢气的量,Csc表示超级电容等效消耗氢气的量。
由于超级电容瞬时等效氢量非常小,将电池和超级电容等效氢量结合在一起,组成能量存储系统(Energy Storage System, ESS)等效氢消耗量可以减小超级电容等效氢量的误差,式(3)转化为(4)
J=min(Cfc+CESS)
(4)
式中CESS为能量存储系统等效氢消耗量。
式(4)中燃料电池的耗氢量可以表示为功率的函数
(5)
式中Pfc表示燃料电池输出功率,LHVH2表示氢气的低热值,ηfc表示燃料电池效率,ηDC1表示单向DC/DC变换器效率。
令α为燃料电池等效氢系数为
(6)
式中,Cfc_avg表示单位时间内燃料电池平均等效氢气消耗量,Pfc_avg表示单位时间内燃料电池平均功率。
由式(4)(5)(6)可以推算出能量存储系统的等效氢消耗量为
(7)
能量存储系统的等效因子s0可以定义为
(8)
此时式(4)可转化为式(9):

(9)
为了维持车辆行驶过程中电池和超级电容SOC在初始值允许范围内,需要添加电池和超级电容的SOC补偿函数如下
(10)
(11)
式中β为电池SOC补偿函数函数,μ为电池SOC补偿函数调节因子,SOCbat_init为电池SOC初始值,γ为超级电容SOC补偿函数,μ1为超级电容SOC补偿函数调节因子,SOCsc_init为超级电容SOC初始值。
将电池和超级电容SOC补偿函数加入等效因子中,由式(8)(10)(11),设计出基于电池和超级电容SOC一致性变等效因子k1,如式(12)
k1=s0·(1+β+γ)
(12)
则ECMS可以表示为

(13)
约束项为
(14)
式中k1为能量存储系统变等效因子,Pd为整车需求功率,ΔPfc为燃料电池功率变化量,Plimit为燃料电池功率变化限制量,PESS_min为能量存储系统承担最小功率值,PESS_max为能量存储系统承担最大功率值。
其中ECMS采用线性规划求得最优解,利用Matlab中自带的linprog函数进行求解,其参数形式是
[x,fval]=linprog(f,A,b,Aeq,beq,lb,ub,x0)
(15)
式中,x为返回值中的最优解,fval为最优值,f为目标函数的系数向量,A和b分别表示不等式约束A*x≤b的矩阵A和向量b,Aeq和beq表示等式约束Aeq*x=beq中的矩阵Aeq和向量beq,lb和ub分别表示自变量的上下界向量。
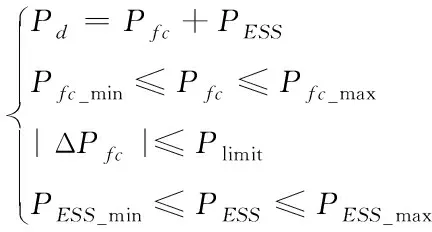
3.2 模糊控制策略
本文设计的模糊控制系统结构如图4所示,由能量存储系统功率、电池SOC和超级电容SOC作为输入,将输入模糊化后对应到相应模糊控制器中、通过知识库中的数据库和规则库进行模糊推理,然后解模糊获得电池和超级电容的功率分配因子Kass,最后经过功率限制获得电池和超级电容的功率参考值。
图4 模糊控制系统结构
3.2.1 模糊化
由图4所示,PESS>0时,为正模糊控制器;PESS<0时,为负模糊控制器。其中模糊输入子集PESS分为极小(VS)、较小(S)、中等(M)、较大(B)、极大(VS),量化因子为0.333×10-4,隶属度函数选取三角形分布如图5(a)所示,模糊论域为[0,1]。SOCbat和SOCsc的模糊子集都是较小(S)、中等(M)、较大(B)、极大(VB),隶属度函数选取三角形分布如图5(b)、(c)所示,模糊论域为[0,1]。模糊输出子集Kass分为极小(VS)、较小(S)、中等(M)、较大(B)、极大(VS),隶属度函数选取三角形分布如图5(d)所示,模糊论域为[0,1]。
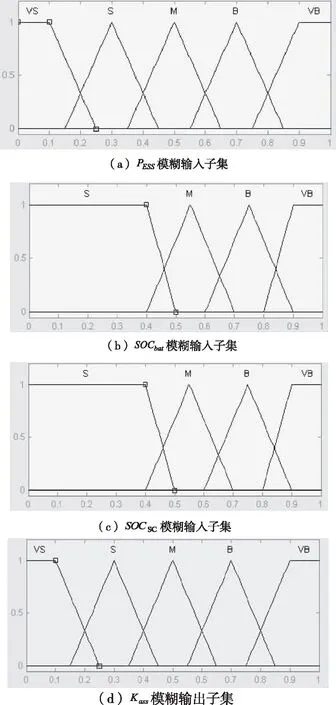
图5 正、负模糊输入、输出隶属度函数
3.2.2 模糊控制器设计
正模糊推理控制器主要设计原则为:
若SOCsc较大时,主要由超级电容承担较大功率,电池承担较小功率;若SOCsc适中时,超级电容承担较小的功率,电池承担较大功率;若SOCsc较小时,禁止超级电容继续放电,全部由电池承担。
依据上述模糊推理主要设计原则所涉及的正模糊控制器共设有80条模糊规则,采用IF…THEN…的形式,正模糊规则见表1。
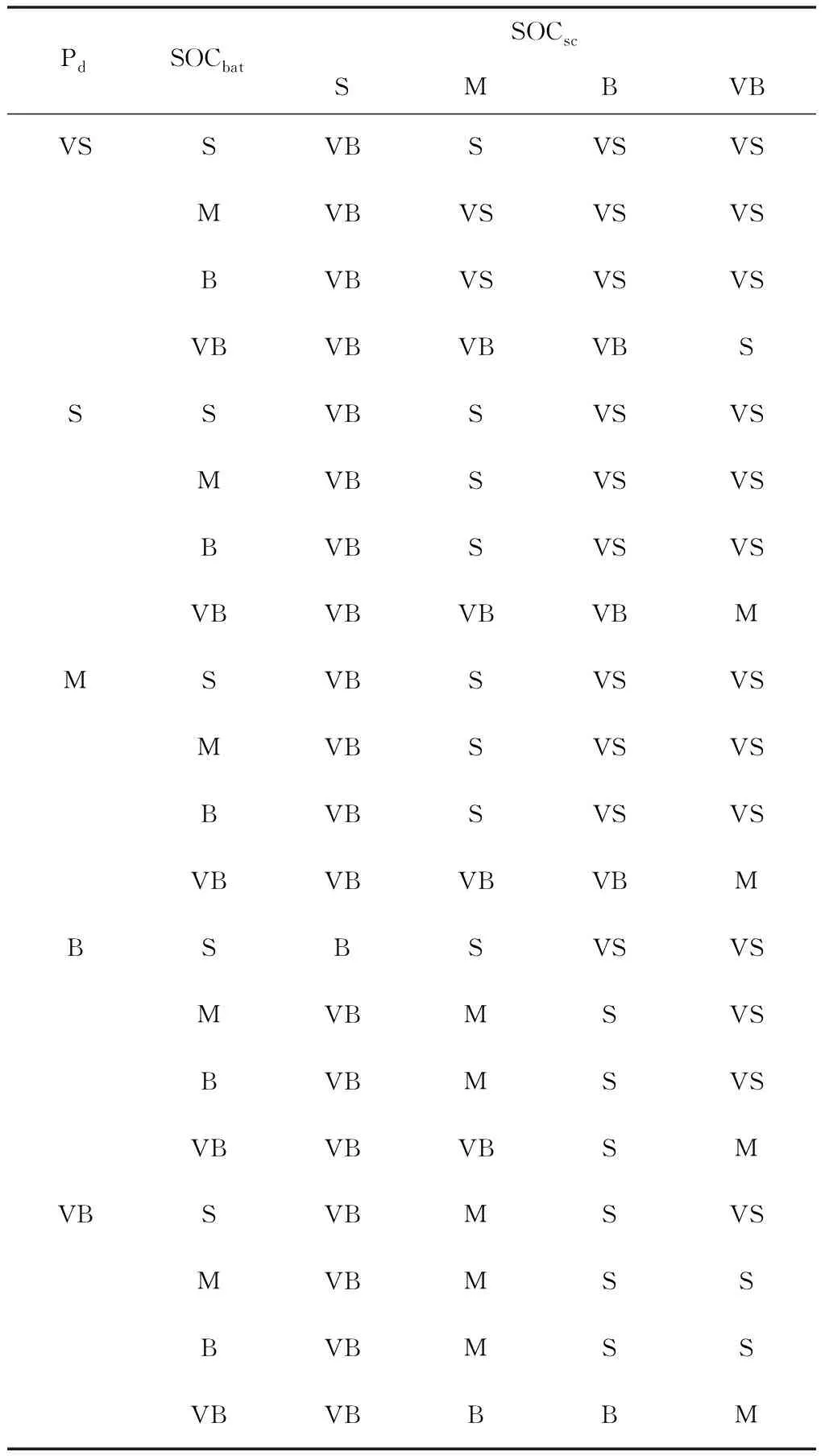
表1 正模糊电池功率分配因子Kass
负模糊推理控制器主要设计原则为:
若SOCSC较小和适中时,主要由超级电容吸收较大功率,电池吸收较小功率;若SOCSC较大时,超级电容承担较小的功率,电池承担较大功率;若SOCSC极大时,禁止超级电容继续充电,全部由电池吸收。
依据上述模糊推理主要设计原则所涉及的负模糊控制器共设有80条模糊规则,采用IF…THEN…的形式,负模糊规则见表2。
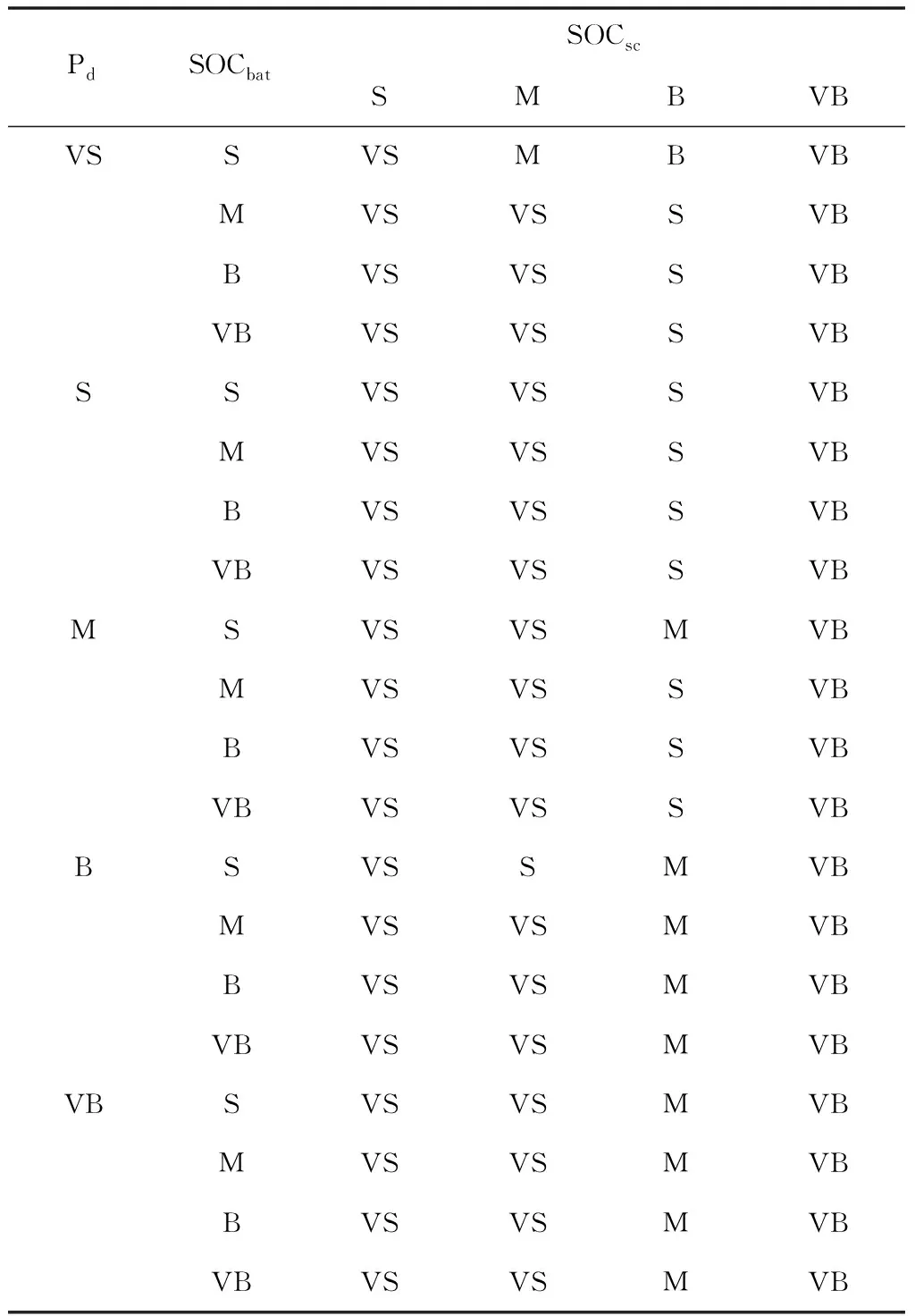
表2 负模糊电池功率分配因子
3.2.3 模糊输出及功率限制
本文模糊控制采用重心法进行解模糊,解模糊所得的Kass是决定能量存储系统中电池和超级电容功率分配因子,定义如下
Kass=Pbat/PESS
(16)
则电池分配功率为
Pbat=PESS×Kass
(17)
Psc=PESS-Pbat
(18)
针对超级电容的过充和过放问题,提出功率转移算法,将超级电容超出SOC功率限制部分的功率转移给电池,功率转移策略如下

(19)

(20)
式中,Pbat_ref为电池参考功率值,Psc_ref为超级电容参考功率,SOCsc为超级电容SOC值,SOCsc_min为超级电容SOC最小值,SOCsc_max为超级电容SOC最大值。
4 仿真及对比分析
为验证本文提出的能量控制策略的可行性,基于Matlab与Simulink的联合仿真,采用Advisor自带的BD_FUELCELL模型的基础上添加超级电容进行二次开发,搭建FCHEV复合能量源仿真模型,如图6。
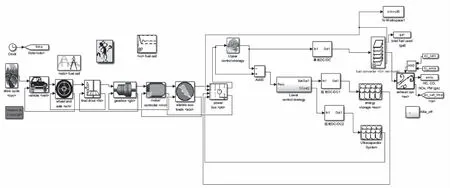
图6 FCHEV复合能量源仿真模型
在仿真模型中,上层等效氢消耗最小控制策略通过控制单向DC/DC变换器调节燃料电池的功率输出;下层模糊控制策略连接两个双向DC/DC变换器,分别控制电池和超级电容的功率输出。
考虑到小车经常在市区使用的需求,选取UDDS(美国城市循环工况)+NEDC(新欧洲循环测试工况)作为能量管理策略的仿真工况。仿真参数见表3。
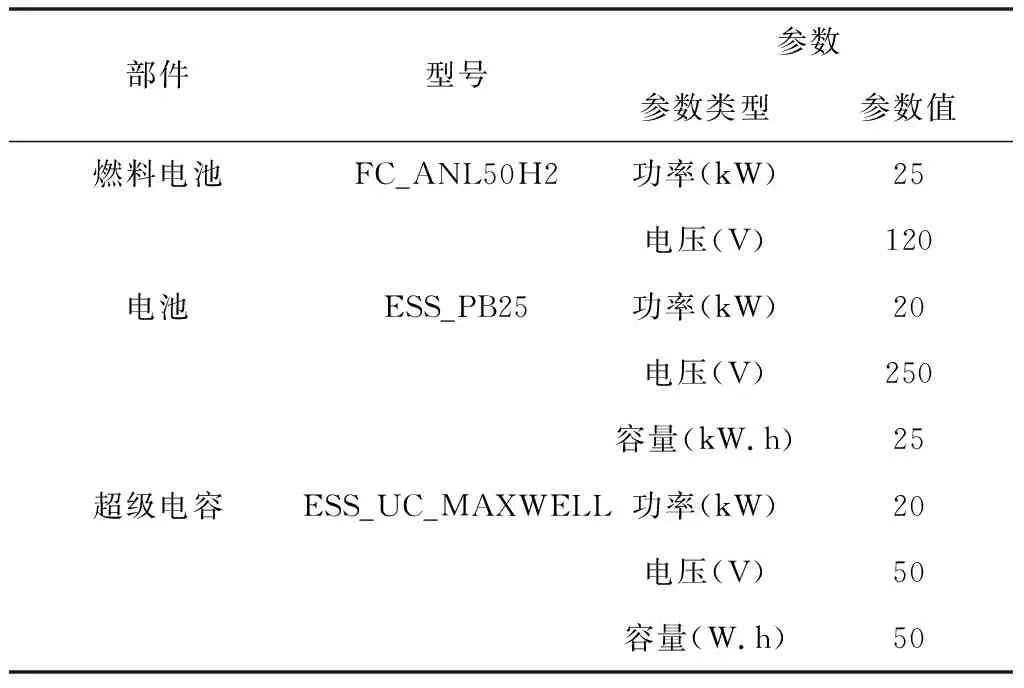
表3 复合能量源系统主要仿真参数
设置能量管理策略与对比策略电池和超级电容SOC初始值都为0.7,在Advisor进行仿真,仿真结果如下图。
由图7可知,在燃料电池未启动阶段,主要由能量存储系统提供能量,当燃料电池启动后,燃料电池作为主能量源,能量存储系统作为辅助能量源共同为驱动整车提供能量。图7(a)和(b)分析得知,融合ECMS和FLC与对比ECMS相比,燃料电池和电池功率输出更加平稳,超级电容能够积极承担峰值功率,实现超级电容对需求功率削峰填谷的作用。由图8可知,在相同的仿真工况中,融合ECMS与FLC控制策略氢能源消耗更少,降低了氢能源的消耗,提高了整车燃油经济性。由图9和图10可知,在融合ECMS与FLC控制策略仿真中,电池SOC波动更小,超级电容SOC波动更大,超级电容承担了峰值功率,延长了电池使用寿命同时,提升了超级电容的利用率,并且电池和超级电容SOC都能够维持在初始值允许范围内,保证了电池和超级电容SOC一致性和整车动力性。仿真结果见表4。
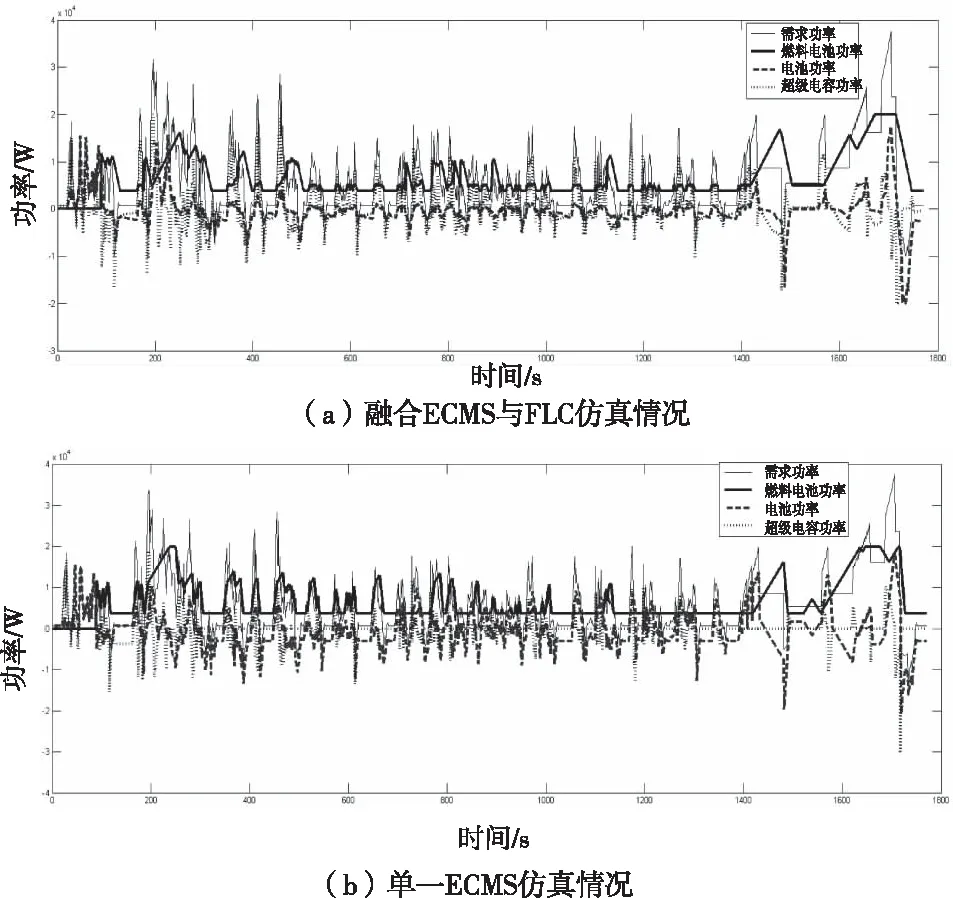
图7 两种策略下功率仿真图
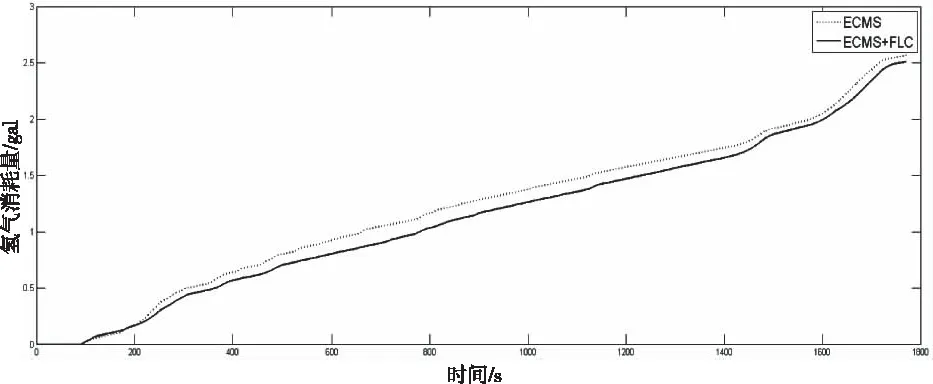
图8 两种策略下氢气消耗情况对比图
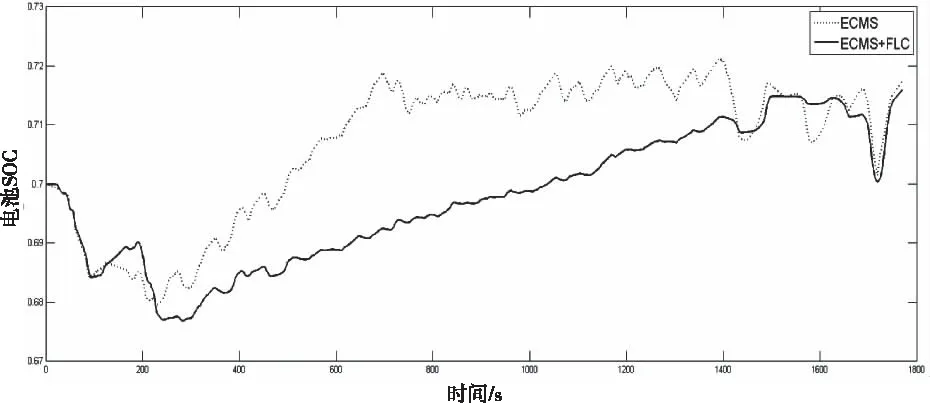
图9 两种策略下电池SOC比较图
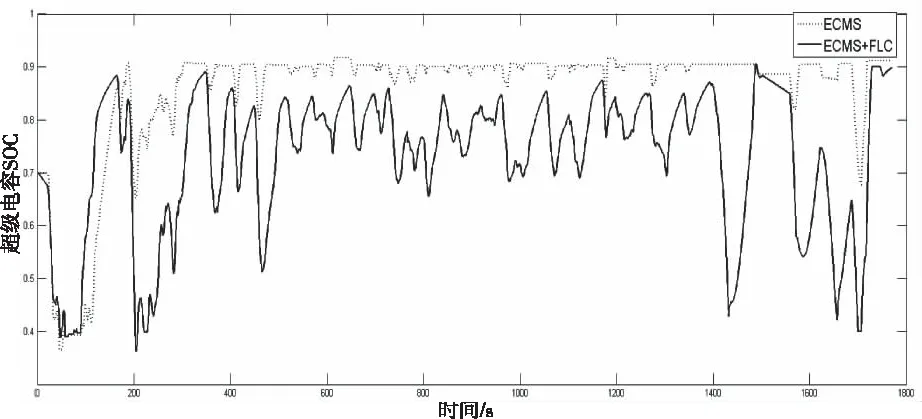
图10 两种策略下超级电容SOC比较图
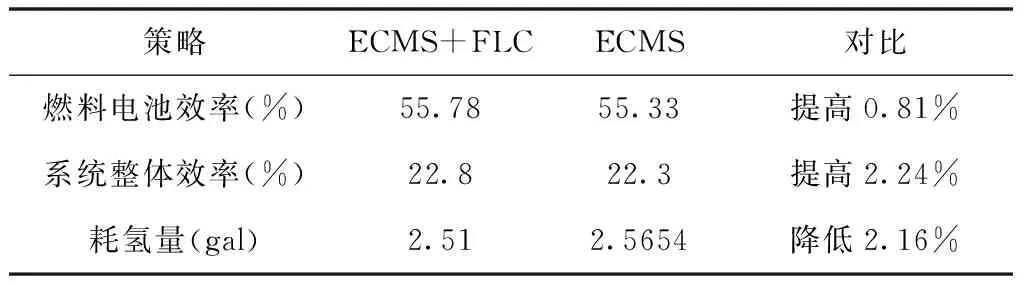
表4 仿真结果数据对比
5 结论
1) 将循环工况下的需求功率、三能量源的动态工作效率以及电池和超级电容SOC等相关参数作为设计基于ECMS与FLC的FCHEV能量管理策略的依据,以降低氢能消耗和延长电池使用寿命为目标,确定了车辆行驶过程中能量源的功率分配原则。
2) 设计了基于等效氢消耗最小和模糊控制的分层能量管理策略,实现了三能量源在车辆行驶过程中分层调节功率输出。首先,设计了基于电池和超级电容SOC的变等效因子,调节和优化燃料电池的功率输出。其次,设计模糊控制策略,使超级电容承担峰值功率,获得电池和超级电容的功率分配。合理进行功率分配同时,有效降低了氢能源消耗和电池的功率波动,延长了电池使用寿命。
3) 仿真结果表明,与单一ECMS相比,该策略下的燃料电池效率提高0.81%,系统整体效率提升2.24%,耗氢量降低2.16%,并且电池和超级电容SOC值都能够维持在初始值范围内,保证了电池和超级电容SOC的一致性,提高了整车燃油经济性和整车效率。
由于设计策略过程中只考虑到电池和超级电容SOC值,没有将行驶工况考虑在内,该策略缺少对工况的适应性,因此如何提升控制策略对工况适应性,将是后续研究工作的重点。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
发明与创新·大科技(2019年12期)2019-03-17
传播与制作(2018年9期)2018-11-15
神州·中旬刊(2017年1期)2017-06-28
知识就是力量(2016年6期)2016-05-31
中学生数理化·高二版(2016年5期)2016-05-14
微型计算机(2010年10期)2010-09-09
现代电子技术(2009年13期)2009-08-31
中学生数理化·高二版(2008年11期)2008-06-17