轮毂式永磁同步电机输出转矩融合估算方法
2021-11-17 08:35陈飞皓王云超胡志超
计算机仿真 2021年5期
陈飞皓,王云超,沈 建,胡志超
(集美大学机械与能源工程学院,福建 厦门 361021)
1 引言
目前,各轮独立驱动控制已经成为车辆全轮驱动技发展的主要方向[1-3]。而轮毂电机驱动作为各轮独立驱动控制的主要手段,通过各轮毂电机输出转矩的协调控制可以有效提高车辆的稳定性和机动性。因此,轮毂电机驱动成为目前国内外研究的焦点[4-7]。由于轮毂电机输出转矩的测量成本高、环境影响大等原因,采用估算法获得轮毂电机输出转矩是一种更有效的手段,而电机转矩估算也是电机控制研究中的一个重要领域[8-11]。
在电机控制研究方面,关欣等人[9]通过建立永磁同步电机速度控制模型,设计基于卡尔曼滤波器结构的负载转矩观测器,将负载转矩看作输入信号,提出一种抗扰动控制策略。丁有爽等人[10]采用卡尔曼滤波器对永磁同步电机负载转矩和系统谐振模态幅值等状态信息进行估计,并根据所估的负载转矩对负载转矩影响进行补偿。郑泽东等人[11]分析了传统Luenberger负载转矩观测器的局限性,利用卡尔曼滤波器对永磁同步电机负载转矩进行估计;Lee等人[12]等采用自适应卡尔曼滤波方法对直流电机负载转矩进行估计,并将其应用在主从式机械手上。Mohammad等人[13]提出了一种在线磁链与转矩观测方法用来减小转矩脉动。Mihai等人[14]用两个串联的滑模观测器观测永磁同步电动机转子位置、转速和负载转矩。以上的转矩估算研究,建立的模型和观测系统较为复杂,不便于在工程上实现。
张志勇等人[15]提出了基于电流和转速的无刷直流电机输出力矩估计方法,以电机电流、转速为自变量,输出力矩为因变量。通过核变换将自变量与输出力矩间非线性关系线性化,再通过偏最小二乘回归对输出转矩进行估计。该方法不用建立完整的电机模型,只对电流、角速度与输出转矩进行非线性建模,较为实用。但由于该方法并没有对建模参数的选取进行理论分析,在建模时并未考虑转动惯量的影响,具有一定的局限性。
转动惯量作为输出转矩的一个重要影响参数,其测试方法有离线测量和参数辨识两类。近年的研究多集中在参数辨识方面,有最小二乘法、模型参考自适应辨识法、梯度校正参数辨识法、状态观测器法、卡尔曼滤波法等[16-18]。在线辨识方法主要是针对伺服系统转动惯量、电机电阻和电感等进行多参数辨识,但需要设计辨识系统,较为复杂。离线测定方法包括:单线扭转振荡法、悬吊法、落重法和空载减速法。其中空载减速法适用于功率在100kW以上的电机,单线扭转振荡法和悬吊法都需要拆卸电机,测试难度和成本较高。落重法的测试相对简单,但这种方法忽略了电机在转动过程中的机械损耗,误差较大[19,20]。
针对目前研究中存在的不足,提出一种负载转矩融合估算方法和转动惯量测定方法。
2 轮毂电机前馈神经网络模型
2.1 神经网络建模
神经网络以神经元为计算单位,各层神经元间通过权重和阈值连接。合理地建立并训练神经网络,可以完成对任意函数的拟合。人工神经网络通常由输入层、隐藏层以及输出层组成。
本文以归一化转速和归一化电流为输入,建立了输出转矩神经网络模型。采用L-M算法进行训练。输入层到隐藏层间采用sigmoid函数作为激活函数映射出10个神经元,如图1所示。
Sigmoid函数表达式
(1)
输入层神经元到隐藏层神经元间映射关系:
hi=fi(W1ix+b1i)
(2)
W1i是本次映射中第i个权重向量,x是输入向量,b1i是第i个阈值。
隐藏层神经元到输出层神经元间映射关系:
Ts=o=f2(W2h+b2)
(3)
2.2 建模数据采集
图2所示为轮毂电机测试平台,可以对电机电枢电流、转速以及输出转矩等信号进行采集。负载转矩由磁粉制动器来施加。轮毂电机的转速和电枢电流由电机驱动器获得,加速度由角速度微分得到。转矩信号通过隆旅-WTQ1060A型扭矩转速传感器和GTS-VB采集板卡获得,采样周期为20ms。
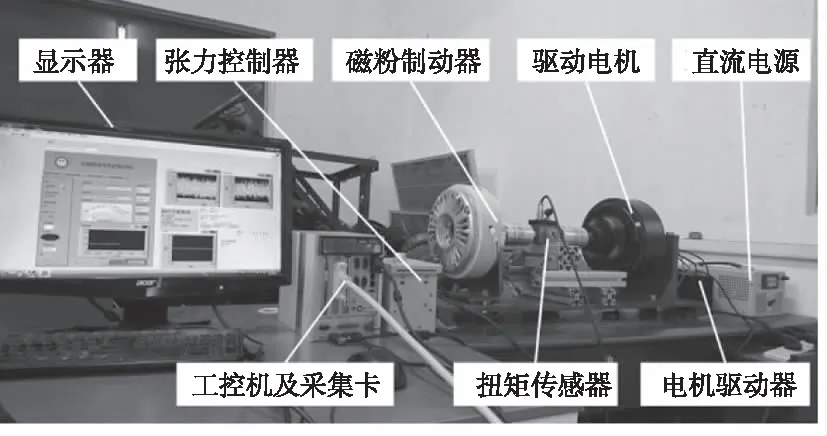
图2 轮毂电机测试平台
在电机端电压不变的条件下,通过磁粉制动器缓慢加载制动力矩来改变电机的转速,直至电机堵转。电机在此过程中缓慢减速,惯性力矩很小,可以忽略不计。
2.3 实验验证
在永磁同步电机驱动系统中,外部负载变化和电机端电压变化都会引起电机转速变化。针对这两种不同的工况,在轮毂电机测试平台上,对神经网络模型转矩估算能力进行对比验证。
图3所示为改变外部负载工况的实测输出转矩和前馈神经网络模型的预测结果的对比。实验工况为:电机的端电压为42V,0s到4s空载,4s以后开始调整磁粉制动器动力阻力矩。
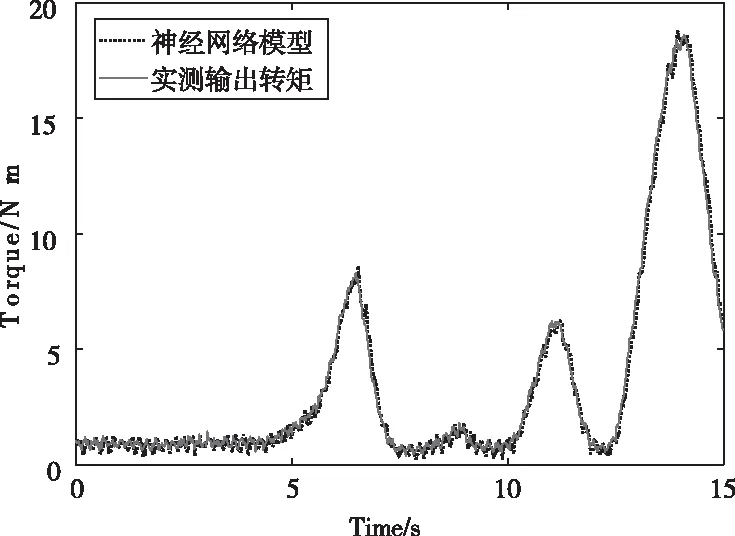
图3 实测输出转矩与神经网络估算值对比(工况1)
从实验结果表明在只改变负载的情况下,前馈神经网络模型预测准确性非常高。
图4所示为主动调整电机的端电压工况的转矩对比。实验工况为:制动器上负载不变的情况下来改变端电压,控制电机做加、减速运动。电机在0s到3s间做加速运动,角速度由0上升到45rad/s,3s到5.7s间做匀速运动,5.7s到8.7s间电机做减速运动到停止转动。
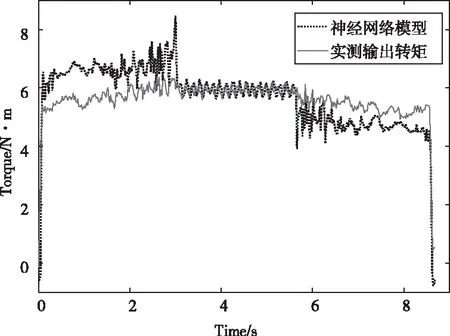
图4 实测输出转矩与神经网络估算值对比(工况2)
对比结果表明,该神经网络模型在平稳阶段具有很好的预测精度,但是在加减速阶段出现了较大的误差。其主要原因在于第二种工况的加速度要远大于第一种工况。由第一种工况的磁粉制动器的加减速受制动器性能的影响相对很小,而第二种工况通过调整电机端电压可以实现瞬时的加减速,其加速度明显提高,因此,电机惯性矩对电机的输出转矩造成较大的影响,而神经网络模型对于这种瞬时的变化没有很好的适应能力,从而造成了较大的误差。针对该问题,本文提出了一种轮毂电机输出转矩融合估算方法,并建立了其估算模型。
3 轮毂电机融合估算模型
永磁同步电机的电磁转矩为
Te=KtIs
(4)
式中Te是电磁转矩;Kt是转矩系数;Is是电枢电流。
电机电磁转矩与输出转矩之间的关系

(5)
式中To是输出转矩;c是阻尼系数;ω是角速度;J是转动惯量;ω′是角加速度;
将(4)代入(5)可得

(6)
转速不变时的稳态输出转矩Ts为
Ts=KtIs-cω
(7)
永磁同步电机在铁芯材料过载饱和等情况下转矩系数会产生变化[19],且精准模型中待测参数过多。为此,本文提出如图5所示的融合模型来估算输出转矩。
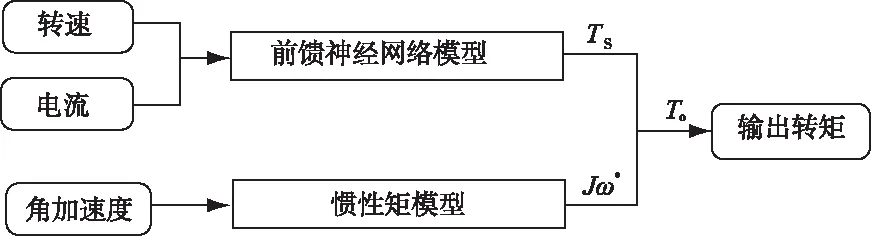
图5 融合模型示意图
将转动惯量参数与神经网络模型融合可得到融合模型数学表达式

(8)
4 轮毂电机转动惯量测定
准确的测得轮毂电机转动惯量是融合估算模型的主要工作之一,而目前四种电机转动惯量的测试方法并不适用于轮毂电机的转动惯量的测试。因此,本文提出一种更加适合轮毂电机转动惯量测试的拖动加速度控制测试法。
4.1 转动惯量测试平台及原理
转动惯量测试系统和轮毂电机测试系统有基本相同的组成,如图6所示。
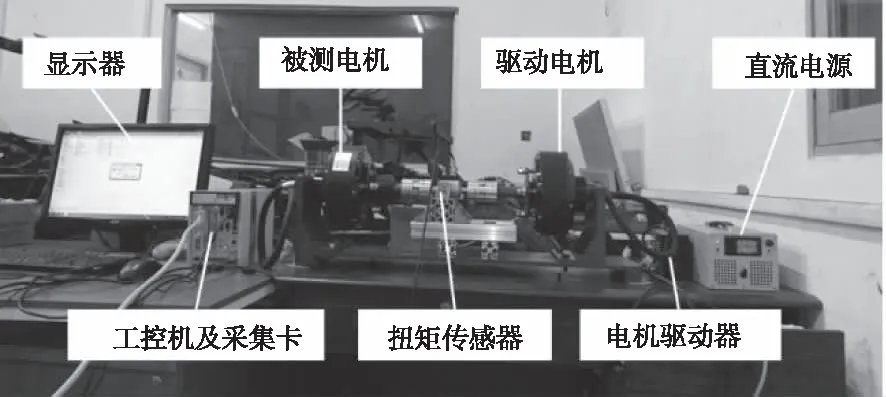
图6 轮毂电机转动惯量测定系统
根据牛顿定律可知,驱动电机拖动被测电机运动的过程中,驱动电机输出力矩应该与被测电机的阻力矩相等,其力矩平衡方程为

(9)


(10)
将(9)、(10)两式相减可以得

(11)
当角速度ω=ω1时,有
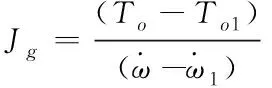
(12)
4.2 转动惯量测试结果
通过转动惯量测定系统,实验获得了4组不同角加速度下的转矩数据,并将其两两组合代入式(12),求得六组转动惯量,如表1所示:
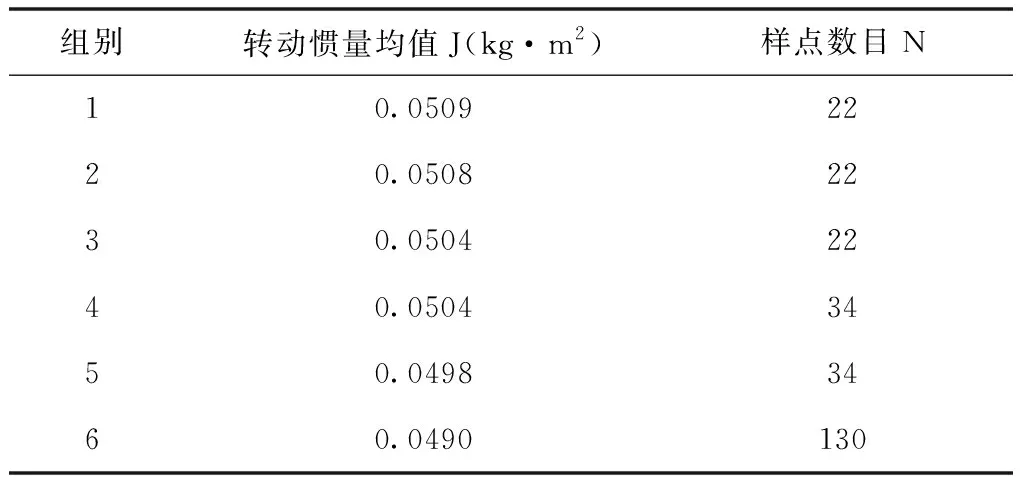
表1 转动惯量测定值
根据各组样点数目计算其加权平均数
(13)
式中Ji为第i组转动惯量均值,Ni为i组样点数目,求得转动惯量值0.0497kg·m2
5 融合估算模型实验验证
利用前面测得的实验数据,对轮毂电机输出转矩融合估算模型进行对比验证,结果如图7所示。
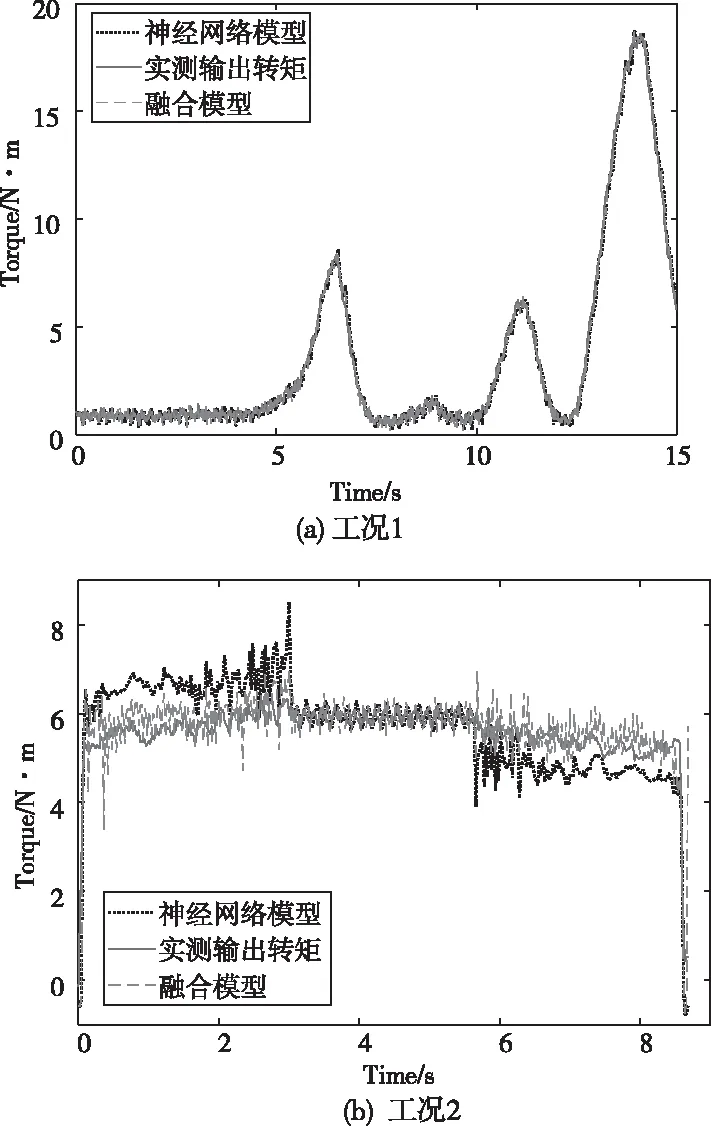
图7 实测输出转矩与神经网络、融合模型估算值对比
从图7可以看出,轮毂电机输出转矩融合估算模型的预测结果较大幅度的提高了轮毂电机输出转矩的预测精度,能够较好的跟踪电机输出转矩的瞬态和稳态变化,具有较好的实用价值。
6 结论
针对轮毂电机转矩估算和旋转电机转动惯量测量中存在的问题,本文开展了输出转矩融合估算研究和转动惯量测试研究。
根据本文提出的轮毂电机输出转矩融合估算方法建立的融合估算模型很好的解决了电机瞬态加减速的输出转矩跟踪困难问题。该模型具有建模简单、预测精度高、响应速度快等优点,非常适合轮毂电机驱动车辆的主动控制加减速输出转矩的预测,对提高轮毂电机驱动车辆的稳定性和安全性提供重要的依据。
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
航天器环境工程(2021年6期)2022-01-07
新视线·建筑与电力(2021年2期)2021-09-10
汽车实用技术(2021年3期)2021-02-24
电机与控制学报(2018年9期)2018-05-14
山东青年(2016年12期)2017-03-02