动力锂电池SOC估计仿真研究
2021-11-17 07:08贾海峰
计算机仿真 2021年5期
贾海峰,李 聪
(上海工程技术大学机械与汽车工程学院,上海 201620)
1 引言
近年来随着新能源汽车技术的不断发展,纯电动汽车动力电池技术已经成为汽车行业的研究热点和难点,尤其对电池管理系统提出了新要求。而荷电状态 (State Of Charge, SOC) 是电池管理系统的一个最重要参数,为纯电动汽车剩余可行驶里程和充放电安全性提供重要依据和保障。SOC值不能通过直接测量得到,只能依靠与可测参数间的关系进行估计,然而这种关系是非线性的,尤其当电动汽车在复杂变电流工况情况下精确地估算其值是个难题。
目前用于估算SOC值的方法较多。各种估算方法各有优点和适用限制:安时积分法结合开路电压法[1]避免了电池长时间静止,但累计误差依然存在;建立神经网络黑箱模型方法[2]虽然具有较高的预测精度,但需要大量的电池充放电数据,在实车环境中需要一定的预测时间;扩展卡尔曼滤波(Extented Kalman Filter, EKF)[3-4]方法在一定领域使用广泛,但算法在滤波过程中易发散,而且对电池线性化时会导致线性化误差。文献[5-6]采用无迹卡尔曼滤波(Unscented Kalman Filter,UKF)方法对电池SOC进行了估计,避免了线性化误差,提高了估算精度,但UKF算法在迭代过程中不能实时更新系统噪声的统计特性,造成在实际工况变电流的情况下,滤波效果较差。
综上所述,已有一些文献利用卡尔曼滤波类算法对锂电池SOC进行估计,但都假设系统噪声是不变的,并未考虑到滤波过程中系统噪声的统计特性是时变的。本文提出的改进型UKF算法,能在滤波迭代过程中对噪声进行实时预测和修正,解决了模型误差的影响,避免了线性化误差。
2 电池建模及参数辨识
2.1 模型的建立
考虑到等效电路模型的精确度和计算复杂度,本文选择2阶RC电路模型作为锂电池SOC估计模型,该模型中的电路元件等效电池的电化学特性,电路模型如图1所示。模型中Uoc代表开路电压(Open Circuit Voltage, OCV);Uo表示电池的端电压;i表示回路中的电流;Ro为欧姆内阻;Rs、Rp和Cs、Cp分别表示极化电阻和极化电容。
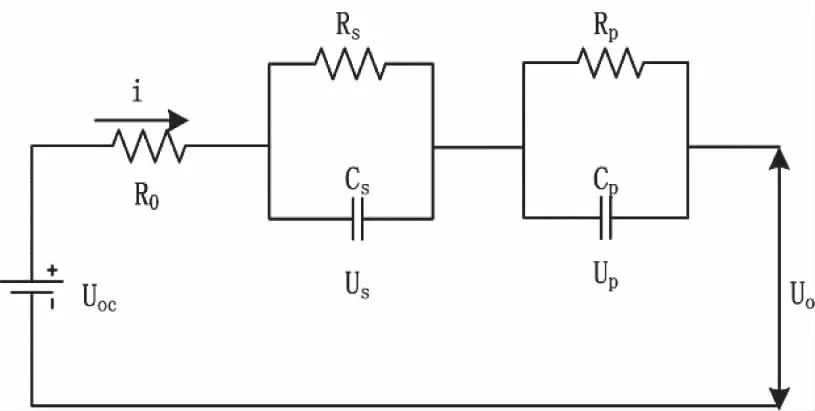
图1 2阶RC等效电路模型
对于2阶RC模型,选择SOC、Us、Up为状态量,记为x=(SOC,Us,Up)T,选择Uo为输出变量,i为输入变量,由安时积分原理和电路模型可得2阶RC模型的状态方程
(1)
式中,τ1=RSCS、τ2=RpCp为积分时间常数;Δt为系统采样间隔时间;Cmax为当前状态下电池的最大可用容量。
由基尔霍夫定律可知,2阶模型的输出方程为
Uo(k)=Uoc(SOC(k))-Us(k)-Up(k)-Ro·i(k)
(2)
式中,Uoc(SOC(k))是开路电压关于荷电状态的高阶非线性函数。
2.2 OCV与SOC关系测试实验
开路电压Uoc与SOC是一一对应的关系,OCV通常被看作SOC的高阶非线性函数,由于受极化作用影响,为得到可靠的OCV数据,通常需将电池长时间静止以达到稳定的电压值。考虑到锂电池的滞回电压特性,在同一SOC值下充电时的开路电压值大于放电时的开路电压值,因此充电实验和放电实验都要进行。本文以三星公司生产的INR 18650-20R型三元锂离子电池为研究对象,电池基本参数:标称容量为2000mA·h;标称电压为3.6V;充电截止电压为4.2V;放电截止电压为2.5V。
实验在25℃恒温环境下进行,将电池充满电至SOC为1后静置2h,然后施加0.5C的恒流脉冲放电电流使SOC值从1到0进行10等分放电,每隔10%SOC静置2h,以静置期间的最大电压作为此SOC的开路电压;随后施加0.5C的恒流脉冲充电电流至SOC值为1,每隔10%SOC静置2h,同样以静置期间的最大电压作为此SOC的开路电压。
对实验测得的OCV值进行多项式拟合,经拟合可知,选择5阶模型精度的数量级,拟合曲线如图2所示。由图2可知,充电曲线和放电曲线差值较小,故选用两曲线的均值曲线作为锂离子电池的最终结果[7],得到均值曲线表达式为
USOC=7.3478·SOC5-23.8822·SOC4+28.9997·
SOC3-15.3923·SOC2+3.8952·SOC+3.2104
(3)
2.3 模型参数辨识
本文采用递推最小二乘法[8]辨识模型参数。为得到最小二乘形式需要对图1所示二阶RC模型进行如下处理。
二阶RC模型经拉普拉斯变换可得连续系统传递函数为

(4)
采用式(5)所示的双线性变换法,将基于s平面的方程映射到z平面
(5)
令U(s)=Uo(s)-UOC(s),则可得到z平面的离散系统函数和相应的差分方程分别为
(6)
U(k)=a1U(k-1)+a2U(k-2)+
a3Ib(k)+a4Ib(k-1)+a5Ib(k-2)
(7)
式中,ai(i=1,2,…,5)为与模型相关的系数,式(8)为其表达式
(8)
可得最小二乘形式为
(9)
式中yk为系统的输出变量;hk为系统的数据变量;θk为系统的参数变量;ek为平稳零均值白噪声。
结合式(9)可得递推最小二乘法公式为
(10)
式中,Kk为算法的增益;Pk为状态估计值的误差协方差矩阵。
为满足系统输入为持续激励要求的条件,采集锂电池动态应力测试(Dynamic Stress Test,DST)工况数据,该工况的路况复杂度较高,能够满足递推最小二乘法的持续激励条件。以1s的采样周期得到两个循环的DST工况数据,图3所示为该工况实测电压、电流样本数据曲线以及参考SOC曲线,从图中可看出,电池大多数情况下为小电流充、放电状态。
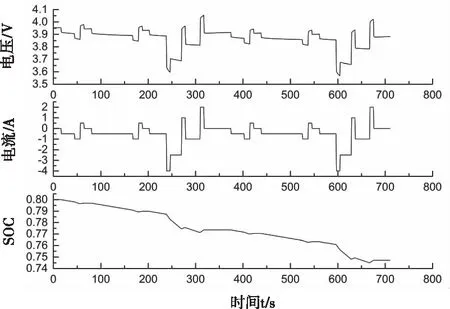
图3 DST工况激励曲线
设置待估参数矩阵初始值θ0=[10-310-310-310-310-3]T,协方差矩阵初始值P0=106I5,I5为5阶单位矩阵。采用式(10)估计出模型参数,然后采用式(8)反推出模型的电容、电阻值。模型参数收敛过程如图4所示,其中电阻参数在350s后趋于稳定,直至收敛,电容参数在200s后收敛。最终得到各参数值:R0=0.0706,R1=0.002,R2=0.0257,C1=95.257,C2=794.28。
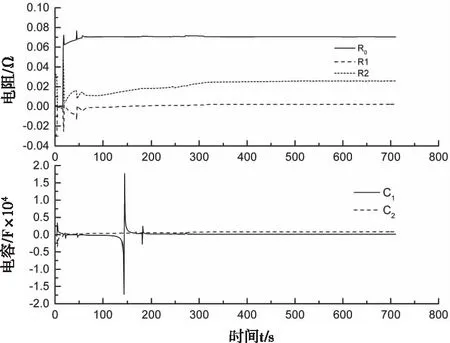
图4 模型参数收敛过程曲线
为评价模型的准确性,根据上表辨识参数值建立模型并进行仿真验证,比较模型仿真端电压和实测端电压数据,得到两者绝对误差曲线如图5所示,最大绝对误差仅为0.0269V,从图中可看出,绝对误差在大多数情况下小于0.01V,说明辨识方法在DST工况下具有较高的辨识精度。
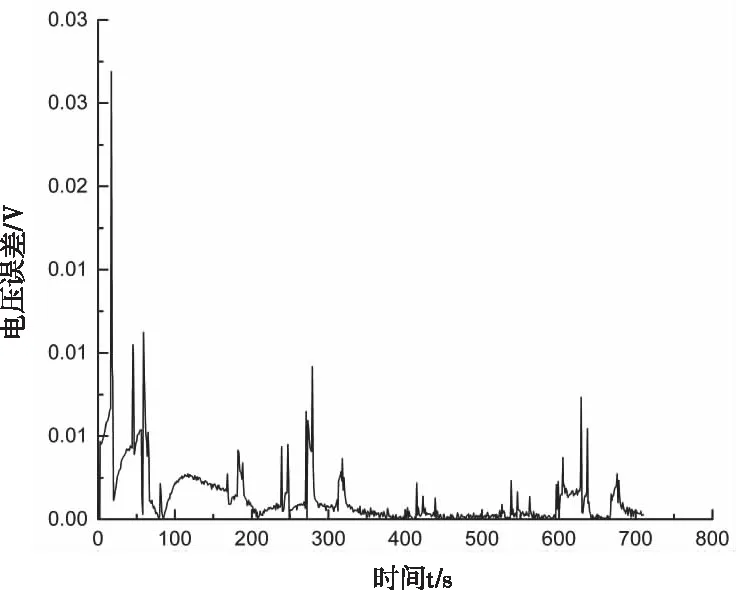
图5 端电压绝对误差曲线
3 基于AUKF算法的锂电池SOC估算
3.1 基本UKF算法
式(1)和式(2)分别是离散时间非线性系统,的状态方程和测量方程,其一般表达式为
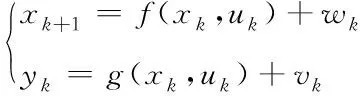
(11)
式中,f和g分别为非线性状态方程函数和观测方程函数,xk和yk分别为系统状态变量和输出变量,uk为系统输入变量,wk、vk分别代表系统过程和测量噪声,两者相互独立,均服从零均值高斯白噪声,协方差矩阵分别为Qk和Rk。
UKF递推估算SOC过程如下:
1)系统初始化。
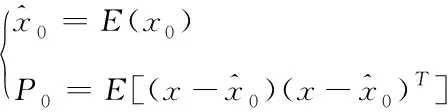
(12)

2)计算sigma点。为解决在递推过程中Pk-1为非正定情况而无法使用Cholesky分解的问题[9],本文采用奇异值分解的方法计算sigma点,改进公式为
Pk-1=Uk-1Sk-1Vk-1
(13)
式中,Uk-1、Vk-1分别代表酉矩阵;Sk-1为对角矩阵。
χi,k-1=
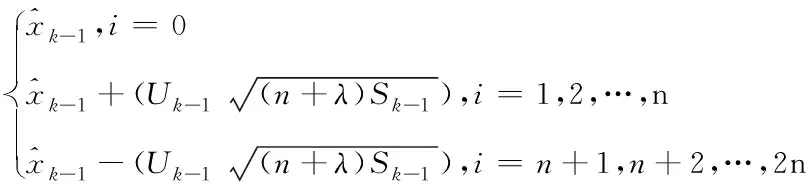
(14)
根据对称采样策略,计算均值和方差的权值:
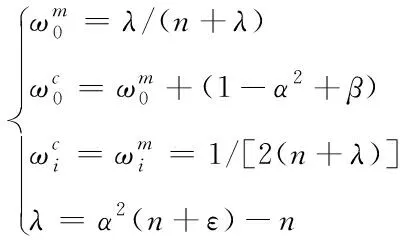
(15)
式中,n为状态变量维数;下标m为均值,c为协方差;α为采样点的分布状态,本文取α=0.01;β用来合并先验信息,对于高斯白噪声系统,取β=2;ε为次级尺度调节因子,通常取值为0[10];λ=α2(n+ε)-n为尺度调节因子。
3)状态的一步预测值和方差更新
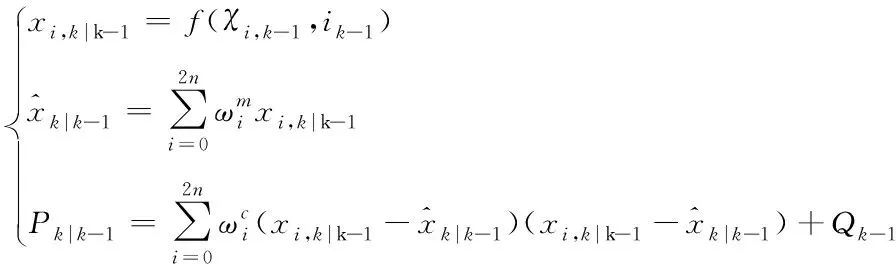
(16)
式中,f为状态方程函数;Qk-1为状态噪声的协方差矩阵。
通过式(16)可以计算出状态变量的一步预测值xi,k|k-1、预测方差Pk|k-1。

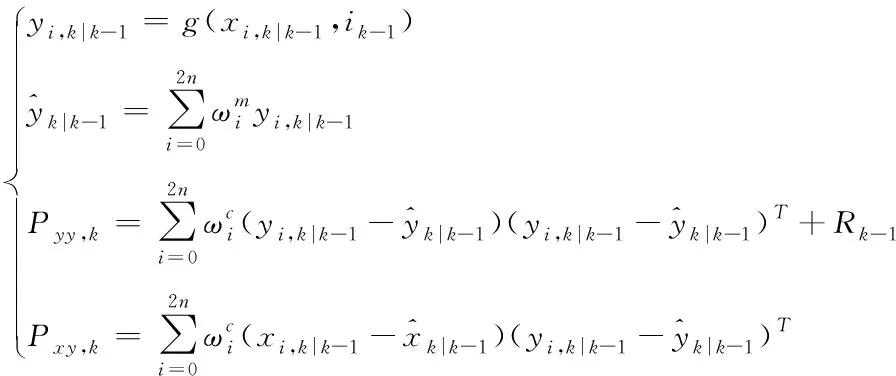
(17)
式中,g为观测方差函数;Rk-1为观测噪声的协方差矩阵。
5)状态变量和协方差修正后估计值
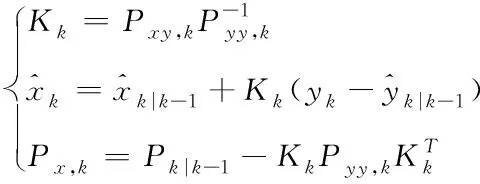
(18)
3.2 改进的Sage-Husa自适应无迹卡尔曼滤波算法
在无迹卡尔曼滤波中,过程噪声wk和观测噪声vk服从wk~(0,Qk)和vk~(0,Rk)的正态分布,在算法迭代过程中Qk和RK的值不变,即假设噪声不变,这显然与实际不符,因为汽车在实际行驶中系统噪声的统计特性是未知的,可能是时变的,应该服从wk~(qk,Qk)和vk~(rk,Rk)的正态分布,即wk的均值为qk,方差为Qk;vk的均值为rk,方差为Rk。
为了解决上述问题,本文将Sage-Husa自适应滤波算法作为自适应噪声估计器与无迹卡尔曼滤波算法结合[11],提出改进的Sage-Husa自适应滤波算法(Adaptive Unscented Kalman Filter,AUKF),算法在递推滤波的同时,利用Sage-Husa自适应滤波算法实时更新过程噪声wk和观测噪声vk的均值和方差,从而达到提高预测精度、提高鲁棒性和降低模型误差的目的。AUKF算法将UKF算法中的公式xi,k|k-1=f(χi,k-1,ik-1)和公式yi,k|k-1=g(χi,k|k-1,ik-1)分别变为式(19)和式(20),式(23)所示为实时噪声统计特性更新公式。
xi,k|k-1=f(χi,k-1,ik-1)+qk-1
(19)
yi,k|k-1=g(xi,k|k-1,ik-1)+rk-1
(20)
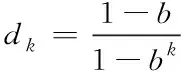
(21)

(22)
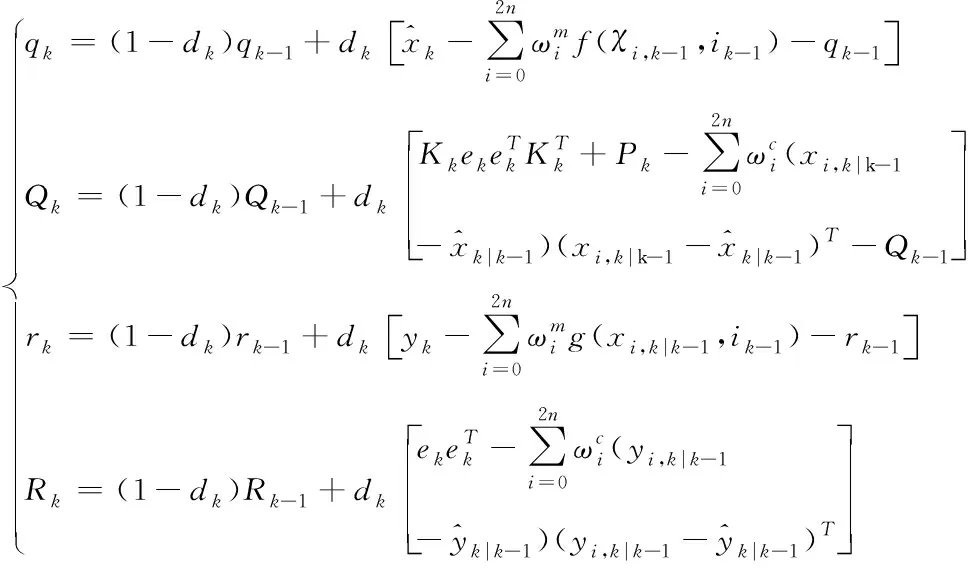
(23)
式中b为遗忘因子,通常取值0.9-1,本文取0.95;ek为观测残差,Kk为卡尔曼增益。
4 仿真验证与分析
新能源汽车在实际使用过程中是以复杂工况行驶的,为验证变工况下AUKF算法对电动汽车锂电池SOC估算的有效性,以US06工况进行放电实验,采集该工况下的电池端电压和电流数据,其工作电流曲线如图6所示。
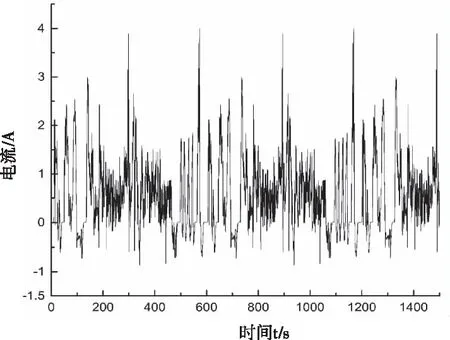
图6 US06工况采样电流曲线
锂电池在SOC初值为80%时,经过1500s得到UKF和AUKF估算结果曲线和误差曲线,如图7-8所示。
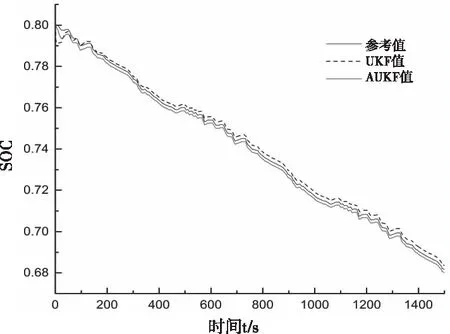
图7 SOC估计结果曲线
从图7估计结果曲线可看出,UKF和改进的AUKF算法估算曲线与SOC参考值曲线都有较好的贴合性,基本上都能跟随真实SOC值变化情况而变化。从图8误差曲线可看出,在开始阶段UKF和AUKF估算误差达到最大值,UKF最大估算误差为1%,而AUKF最大估算误差为0.5%,随着迭代进行AUKF估算误差保持在0.3%以内,而且AUKF的误差变化曲线较平坦,表现出较好的稳定性,在复杂的变电流工况下AUKF算法依然能保持较高的精度,说明了该算法的有效可行性。
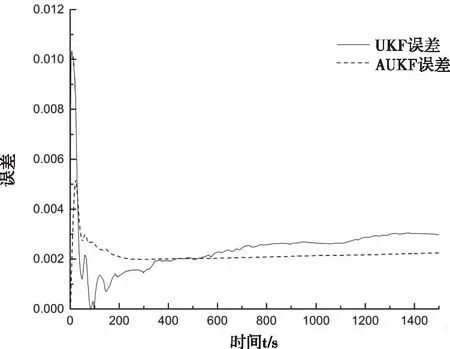
图8 SOC估计误差曲线
图9所示为UKF和AUKF算法端电压的估计结果曲线,表明 AUKF估计电压与实测端电压值更接近,进一步说明改进的AUKF算法的优越性。
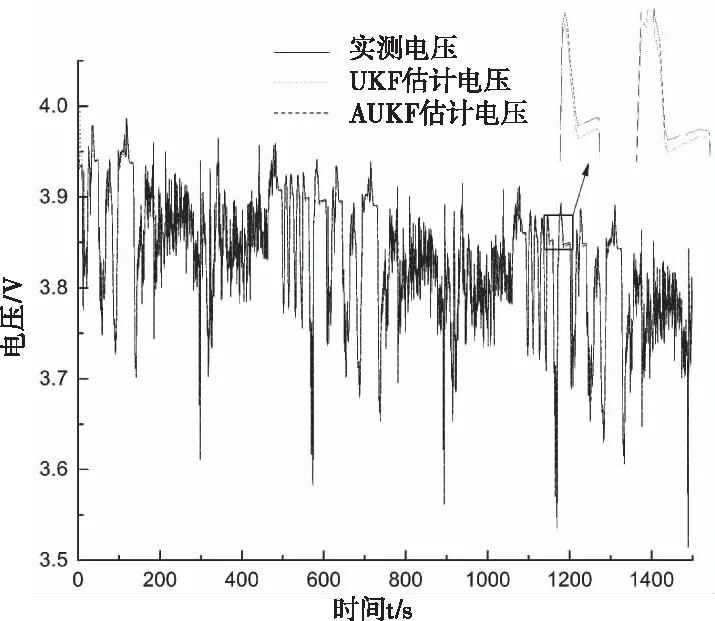
图9 端电压估计结果曲线
5 结论
Equation Chapter (Next) Section 4 本文为解决UKF算法估计锂电池SOC时的不足,消除未知系统噪声对SOC估计的影响,做了如下研究:
1)研究建立锂电池二阶阻容模型,递推最小二乘法辨识模型参数具有较高的精度精度,辨识方法可行有效。
2)研究将改进的Sage-Husa自适应噪声估计器与UKF算法结合,提出基于AUKF算法的动力锂电池SOC估计方法。
3)在复杂变电流工况下,分别利用UKF和AUKF算法进行锂电池SOC估计,仿真结果表明,AUKF算法的SOC估计精度较高,并且实时端电压估计也更接近真实值。
猜你喜欢
电脑报(2022年24期)2022-07-01
煤气与热力(2022年4期)2022-05-23
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
北京汽车(2020年1期)2020-05-07
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
科技知识动漫(2017年4期)2017-04-15
饮食科学(2016年7期)2016-07-27