
通用凯迪拉克CT6轿车电动变速器开发介绍(上)
2021-11-17 09:59:38编译江苏高惠民
汽车维修与保养 2021年7期
◆编译/江苏 高惠民

高惠民(本刊编委会委员)
曾任江苏省常州外汽丰田汽车销售服务有限公司技术总监,江苏技术师范学院、常州机电职业技术学院汽车工程运用系专家委员,高级技师。
通用汽车为后轮驱动产品开发的全新电动变速器(EVT),用于凯迪拉克CT6的插电式混合动力汽车(PHEV)驱动系统。该变速器包括两个集成电动机,行星齿轮和液压离合器。它能够在无级变速(CVT)传动比范围内进行动力分流型混合动力操作;在固定传动比下进行并联混合动力操作,并在不同传动比组合下实现纯电动驱动。本文将介绍从变速器的机械设计,控制设计,电动机设计和动力输出操作,以及用仿真结果作为最终优选开发的基准。使得这款全新电动变速器无论是在车辆纯电动行驶或行驶过程中发动机启动和减速再生电能回收以及与涡轮增压发动机的动力混合,整个驾驶范围内都能提供平稳,无缝连接驱动力。
一、概述
凯迪拉克CT6插电式混合动力汽车(PHEV)的全新电动变速器(EVT)是通用汽车(GM)第二代混合动力汽车专用变速器的一部分,第二代EVT的使用,还有第二代雪佛兰Volt以及通用汽车全球其他前轮驱动(FWD)汽车和后桥驱动器的后轮驱动(RWD)汽车。与第二代Volt一样,新的EVT是从“空白平板电脑”开始设计的,它首先对所有已知的混合动力技术进行了系统性比较,以效率,性能,驱动器质量,耐用性和其他因素上为客户最佳选择。EVT在一个集成式套件中提供了无级变速(CVT)功能以及并联混合动力和电力驱动功能,该套组件的安装空间与常规行星自动变速器大致相同。它的工程技术直接受益于通用汽车在2ML70双模式混合动力EVT基础上优化创新,成为真正的下一产品。2ML70双模式混合动力EVT是通用早期用在凯迪拉克凯雷德混合动力上的双模式EVT,双模式EVT参考本刊2017年第10期“混联式混合动力耦合系统构型分析”一文。
新的EVT是凯迪拉克CT6插电式混合动力驱动系统的核心,它还包括2.0L涡轮增压直喷汽油发动机,液冷锂离子电池组,牵引功率逆变器模块(TPIM),附件电源模块(APM)用于提供12V电源,车载充电器模块(OBCM)用于向系统提供电网能量,以减少车辆对石油燃料的使用,这些是单纯使用混合动力技术所无法实现的。新型EVT内部包含两个可以电力驱动电动发电机,一个输入阻尼器,三个行星齿轮模块,五个多片离合器以及一个电动油泵产生的液压油用于电机冷却和离合器作动的液压润滑系统。
二、功率传输和运行
新的EVT同时提供电动和CVT功能。当发动机关闭时,其两个电力驱动的电动发电机(简称为“电动机”)都可以通过行星齿轮传动来驱动输出,并利用齿轮传动实现一级或二级扭矩倍增。当发动机启动后,一个电动机可以充当发电机,而另一个电动机可以产生轴功率以可变比率传递扭矩,并且通过行星齿轮装置可以放大该扭矩作用,也可以将发动机扭矩从输入传递到输出的比例可变,无需将所有发动机功率都转换为电能,然后再转换成机械能回去。这样,新型EVT使用其电动机、行星齿轮及其他组件即可实现从发动机到输出的CVT动作,而无需诸如皮带之类的摩擦装置。离合器允许系统控制器从多种不同的方式中进行选择,每种方式最适合不同的传动比范围和其他工作条件。
三、电动变速传动概念
在将电动机添加到常规动力总成的各种布置中(例如比较熟悉的在其他常规变速器的输入处并联混合动力电动机)。之所以选择了带有集成电力驱动的专用EVT的概念,是通用汽车长期以来对电动驱动的浓厚兴趣和考虑使用专用EVT的机会。专用EVT的选择来自考虑包括电力驱动在内的完整车辆动力总成的设计。从功能强大且高效的电动机驱动开始,专用变速器发挥了其所有优势,不仅适用于纯电动驱动,而且还适用于使用行星齿轮和电动机的传动比平稳且连续变化的混合动力驱动。该动作避免了如传统的CVT那样,依靠内部摩擦逐步改变传动比来传递转矩。
EVT的一般工作原理是使用行星齿轮将发动机运转时的机械动力分为两部分。第一部分通过发电机以一个扭矩和速度转换为电能,然后通过电动机转换为具有独立扭矩和速度的机械动力。此转换过程使用两个电动机允许同时控制传动比和进出电池和电气配件的电量。第二部分直接通过行星齿轮传动从输入到输出无需转换,这样的传输比起将发动机功率转换成电能的效率更高。当传动比通过齿轮传动装置偏离基本机械传动比时,必须转换为电能并再次转换为机械能输出。因此,离合器可以从用于分配动力的传动装置的不同配置中进行选择,从而使通过变速器的大部分机械动力保持机械形式,以实现最大效率。
四、多种功率分配模式
这些用于分配功率的配置通常称为“模式”。新的EVT具有四种优选的功率分配模式。在每种模式下,传动比都是连续可变的。此外,在每个动力分配模式下,发动机从静止到运转再到与电动机偶合输出,传动比是无限可变的。而且,每种功率分配模式对于特定的传动比范围都是最有利的。
四种优选的动力分配模式中的两种是输入分流模式,其中行星齿轮传动分流发动机输入功率,并且通过将输出处的电动机扭矩与通过传动装置传递的发动机扭矩相加来再次组合功率。输入分流模式之一用于车辆低速,在该模式下,两个电动机中功率较大的电动机以高机械比耦合到输出,效率高,响应灵敏。另一种输入分流模式在机械比相反的极端情况下使用,即在再生制动期间或具有低发动机转速和中高车速,虽然更强大的电动机再次与输出耦合,但机械比率较低
四种功率分配模式中的两种是复合分流模式,其中至少两个行星齿轮组组合在一起,为输入、输出和两个电机中的每一个提供单独的连接。这种类型的模式对于在输入分流模式的设计传动比范围内从发动机向输出传输功率更有效,因为作用输出的扭矩是通过用发电机的分配功率与另一个电动机功率组合来提供。
五、全电动和并联混合协同
新型EVT所有电动驱动模式如同电动汽车(EV)运行一样。通过变换离合器的操作使变速器运行模式得到多种变换。理论上,每个动力分配模式都具有与其相关的电驱动状态,在该状态下,用于实现该模式的离合器选择处于相同的操作状态,并且一个附加的离合器用于在输入轴上提供反作用扭矩。在发动机关闭时,此输入离合器起到制动器的功能,从而使所有来自电动机的扭矩都能像发动机在运转一样对输出产生反作用,因此,变速器可以在发动机关闭下提供峰值输出扭矩。
并联混合动力操作模式,其中发动机和一个电机直接与齿轮相连,以固定的传动比与输出相匹配,并内置在顺序功率分配模式之间同步切换。从一个功率分配模式变换到另一个功率分配模式,可以通过接通和断开相对速度均为零离合器。这种变换只是一个简单的变速器的反作用扭矩路径发生变化的过程。这设计是为在一个电动机可能承载所有反作用力矩。当两种模式的离合器同时激活时,它们将固定变速器的传动比并卸载电动机,在最佳发动机转速达到或接近特定机械比率的情况下,该运行状态具有更高的巡航总效率,而另一个电动机可用于增加扭矩或充电,为附件产生动力以及进行再生制动。
六、组件的功能与布置
图1所示为CT6新EVT的杠杆图,它描述了行星齿轮组,离合器,输入和输出以及两个电动机的结构布置。电动机用A和B表示。从输入到输出,行星齿轮组用P1,P2和P3表示。从输出到输入的离合器分别指定为C1,C2,C3,C4和C5,半固定式离合器(制动器)为奇数编号,全旋转式离合器为偶数编号。
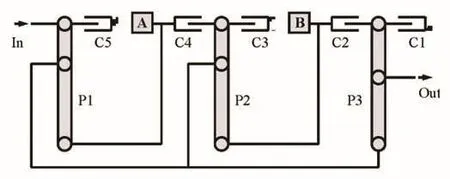
图1 新EVT的杠杆图
从概念上讲,CT6的新EVT其中一部分结构布置与第二代雪佛兰Volt增程电动汽车(E-REV)的变速器有相同之处,如图2所示是Volt的杠杆图。CT6除了包含与Volt两个具有相同功能的行星齿轮组。还增加一组双级行星齿轮组和一对半固定式离合器(制动器),这个离合器倍增了输出扭矩。与第二代雪佛兰Volt增程电动汽车(E-REV)的变速器相比,两者之间概念上的差异在于CT6 PHEV更体现在加强油门踏板的响应性和加速的动力性,而Volt E-REV是在有电池能量满足的情况下,严格遵守电力驱动功能。尽管这两个功能与架构布置有密切相关,但它们都是从广泛的,独立的研究中优选出来所有类型的混合动力车辆的性能,这些研究是针对第二代FWD产品(例如Volt 2)和第二代RWD产品(如CT6)。由于对应发动机排量和结构体积上的差异,FWD和RWD变速器无法共享主要部件。虽然软件功能相似。但在RWD开发中,根据20种不同的基本混合动力系统架构被进行分类组合,从而确定电动机的使用数量。一个电动机允许基本高效的再生制动和混合动力功能电力驱动,第二个电机对传统部件进行了一些改进,弥补发动机在低负荷经济性不足。因此,RWD专注研究单电机并联混合动力系统,包括输入并联混合动力构型;功率分流混合动力构型以及计算机控制混合动力分配架构。从理论研究和优化结果证明,第二代雪佛兰Volt增程电动汽车(E-REV)的变速器与CT6的新EVT配置两个电动机,两个行星齿轮组和三个离合器装置是绝佳选择。因为行星齿轮组具有四个优势功能:
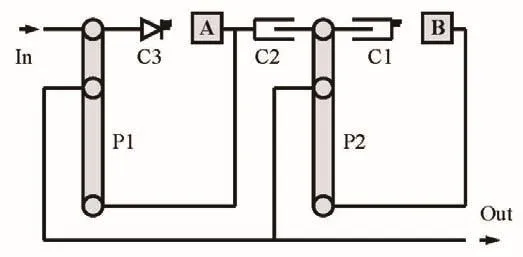
图2 雪佛兰Volt的杠杆图
①两台电动机并联运行,能使驱动力扭矩倍增;
②输入分流混合动力模式CVT运行,使用一组齿轮组用于功率分配,另一个电动机用于增加输出扭矩;
③使用两组行星齿轮组合的双模式混合动力CVT运行,以实现更高效的功率分配;
④并联混合动力运行,其中发动机功率与输出形成固定传动比。
七、运行状态
表1显示了新EVT的11种不同的潜在车辆行驶状态:动力分流EVT驱动模式,固定齿轮(FG)速比并联混合驱动模式和纯电动汽车(EV)模式的运行情况。四种EVT模式中的每一种均可在从发动机输入到输出的一定传动比(TR)范围内提供动力分配混合动力运行,该范围通常受传动效率的限制,因此可以在表格1中EVT模式上方和下方显示的固定齿轮速比状态之间进行选择。
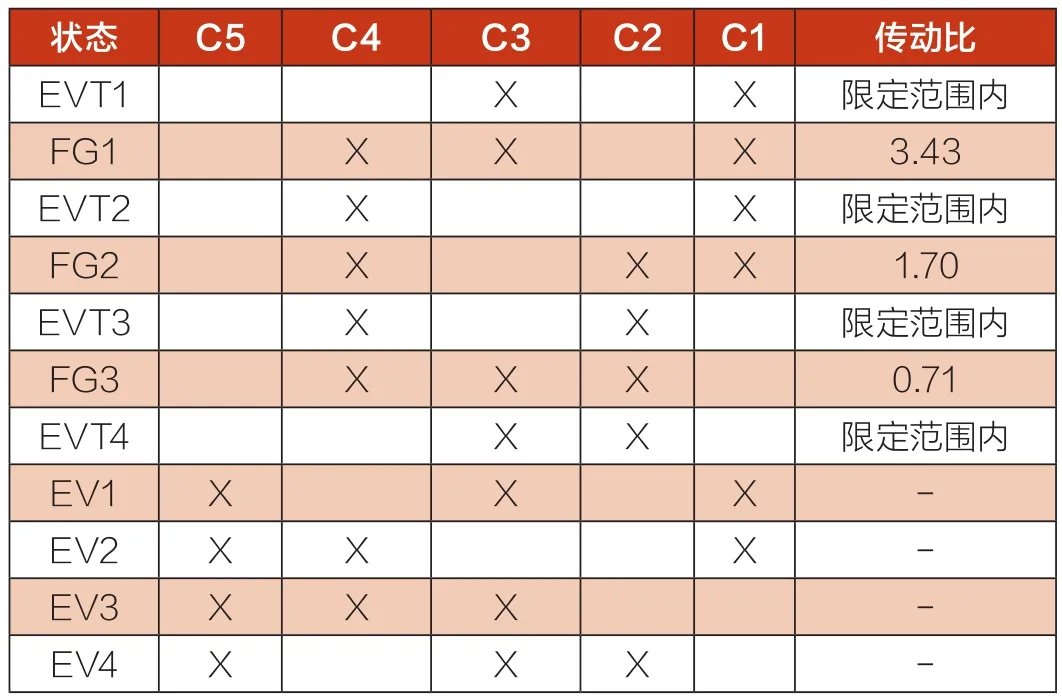
表1 运行状态表
在EVT1中,P1齿轮组分配来自发动机的动力,P2和P3齿轮组分别使用来自C3和C1的反作用扭矩相乘。电动机A为发动机提供反作用扭矩,调节发动机的输出速度比。电动机B通过进出电池电量,增加到输出的扭矩。EVT1可提供一系列相对较大的传动比(快速输入和慢速输出),因为驾驶员对驱动功率的需求超过了电池功率的需求。EVT1通常用于从发动机启动到达到FG1的比率之间提供强劲的加速。
在FG1中,三个离合器C4,C3和C1一起使用时,为并联混合动力运行提供了从发动机到输出的固定比率,电动机B配合输出的较高扭矩比率。C4和C3离合器使电动机A卸载,使其处于待机状态(零扭矩输出状态),而电动机B可以产生或使用电力。FG1以其特定的传动比提供了非常强的加速度,因为发动机动力无需转换即可非常高效地进行传递,并且电动机B可以完全专注于为发动机提供可用的电池电量转换的动力。FG1通常仅在车辆加速行驶时短暂使用。
在EVT2中,P1和P2齿轮组由C4离合器接合在一起,而P3齿轮组和C1离合器提供扭矩倍增。电动机A和B共同工作,以控制从输入到输出的传动比在中间范围内以及进出电池的电量。尽管EVT2可以提供更大范围的传动比,但它在FG1的传动比与FG2的传动比之间并在这些中间比率之间使用时最为有效。EVT2专注于一系列无级变速比,类似于常见的传统齿轮变速器中第二,第三和第四齿轮比,因此EVT2可在各种车速范围内提供强劲,平稳,响应迅速的加速度。
在FG2中,三个离合器C4,C2和C1提供了从发动机到输出的固定传动比,并与电动机A到输出的较高扭矩进行并联混合动力运行。C2和C1离合器使电动机B卸载,但在FG2状态时,其高扭矩效率使得电动机B不必保持在待机状态。
在EVT3中,通过C4和C2离合器的作用将所有三个齿轮组混合在一起。电动机A和B共同工作,以控制从输入到输出范围内的一系列传动比(包括通常用于巡航和超速的传动比)以及进出电池的电量。
在FG3中,三个离合器C4,C3和C2提供了从发动机到输出的超速固定传动比,以及电动机B到输出的更高的固定扭矩比率。C4和C3离合器使电动机A卸载并使其处于待机状态,而电动机B可以产生或使用电力。该传动比非常适合高速巡航,并且在低发动机转速下,发动机功率全机械传动以配合适中的电动机转速非常有效地运行。
在EV状态下,行星齿轮只是简单地用于以不同的有效传动比从电动机A和B到输出的转矩倍增。EV1提供最大的有效传动比,从电动机A到P1的扭矩相乘,从电动机B到P2的扭矩相乘,相加的结果通过P3相乘。CT6使用了11个潜在运行状态中的10个,在适当的持续时间内使用了11个潜在运行状态中的9个,最优使用了11个潜在运行状态中的8个进行驱动。CT6取消了非关键的运行状态,以减少所需的硬件,并且该传输可用于其他车辆的应用中。在CT6车辆的实际操作中,不需要EV2状态,因为EV1和EV3状态可为EV驱动的相互补充。FG2只需要短暂地作为从一种EVT模式到另一种EVT模式的过渡状态,因为在该传动比下EVT2和EVT3的效率几乎与FG2一样。由于CT6中的发动机尺寸较小,因此驱动时不需要EVT4的超速传动比,但是EVT4对于发动机高速时的再生制动非常有效。因此,从技术上可能有人争辩说,新的EVT是八,九,十或十一状态的变速器,并且所有状态都是有区别的,即使是固定的齿轮比也可以使运行中的电动机和发动机具有不同且更合适的传动比与输出。
八、组件横截面
图3所示为新EVT的横截面,显示了其大部分组件,输入或前端位于图的左侧,输出或后端则位于图的右侧。许多离合器组件分成两部分,彼此非常相似,两个集成电机分别连接一个离合器组件。
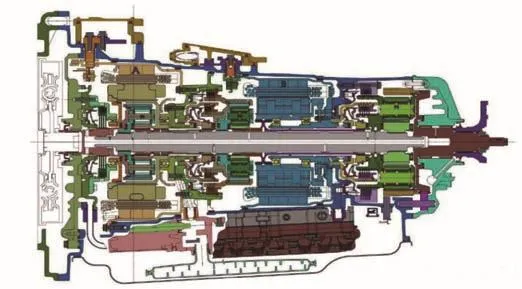
图3 全新电动变速器的横截面
EVT采用铝制的外壳和输入和输出端盖以及油底壳。输入轴具有内部花键,连接在通过螺栓固定至发动机曲轴的输入减振器组件上,输出轴具有常规的外部花键,用于连接驱动轴或分动箱。主轴沿着变速器内中心长度上延伸,将三个行星齿轮组的部件彼此连接,并为围绕主轴的套筒轴提供支撑。
输入轴被一个小直径的湿式多片离合器C5围绕,该离合器带有固定的活塞和可充当输入制动器的反作用板。由于液压系统是由电动油泵提供动力的,而电动油泵由小型高压电机驱动,因此没有传统的变速器输入轴驱动的油泵。输入轴连接到行星齿轮组P1的齿圈。P1齿轮组的太阳轮被连接到电动马达A转子。P1的齿轮组的行星架连接到主轴。电机A是一台感应电机,并为其速度传感器配备了信号齿轮。一对离合器位于电动机A的后面。内部全旋转离合器C4可以将电动机A连接到中间行星齿轮组P2的齿圈,而外部部分固定离合器C3可以充当P2齿圈上的制动器。与P1一样,P2齿轮组的太阳轮连接至电动马达B,其行星架与主轴连接。电机B是稀土永磁电机,具有较厚的转子和相对受限制的外径,因此它不能围绕P2齿轮组。电动机B配有用于位置和速度感应的旋转变压器。一对离合器位于电动机B的后面。内部的全旋转离合器C2可以将电动机B与输出齿轮组P3的行星架组件相连,而外部的半固定离合器C1可以起到作为同一组件上的制动器。
P3齿轮组是双行星齿轮组,其中行星齿轮成对啮合。在每对行星轮中,一个稍微靠近中心轴与太阳轮啮合,另一个与齿圈啮合。附加的行星轮使行星架和齿圈的作用相反,从而来自齿圈的扭矩是施加到太阳的扭矩和施加到行星架的扭矩的总和。在这种情况下,总转矩为变速器输出转矩。这种类型的齿轮组提供了理想的转矩比,实际上这是简单的行星齿轮组无法实现。因为行星齿轮太小了。
电动机A与P1齿轮组之间以及电动机B与P2齿轮组之间的关系相似,每个电动机都连接到太阳轮。同样,电动机A和P2齿轮组之间以及电动机B和P3齿轮组之间的关系相似-每个电动机都可以通过离合器连接到另一个齿轮组的构件上。同样,P2和P3齿轮组的功能彼此相似:齿轮组用于制动器激活时的扭矩倍增,而齿轮组在其同旋转式离合器处于接合状态时与另一组齿轮组合。
九、电动发电机
凯迪拉克CT6 PHEV的新EVT包括两台驱动电动发电机。一个称为“电动机A”,是感应电动机,另一个称为是一种内装式永磁交流同步电机(IPM),它从转子表面以下的磁铁产生转子表面的磁场与定子产生的气隙磁场相互作用产生转矩。两种电动机均具有带有三相绕组的绕线定子结构。感应电动机A三角形连接,而IPM电动机B星形连接。这两个电动机通过两组三相电缆与外部系统电源控制器TPIM连接,TPIM负责监督两个电动机与电池组和高压配件之间的电力交换。
电动机A选择感应电动机可以降低总体系统成本,并且在不影响设计性能的前提下,采用不含稀土磁体的设计。与永磁转子相比,感应转子具有低空转损耗和高速度运转的特点。转子的导条数和条形的设计优化以及定子的条绕组和槽数设计的优化使得感应电机具有所需的性能。定子绕组的三角形连接和低漏感转子设计共同实现了高峰值功率运行,这是此电机应用选定驱动系统架构所必需的。图4是电动机A的分解图。

图4 电动机A的分解图
(未完待续)
猜你喜欢
机械设计与制造(2021年7期)2021-07-26 03:11:34
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
读者(2018年20期)2018-09-27 02:44:48
潍坊学院学报(2017年2期)2017-04-20 08:44:17
工业设计(2016年11期)2016-04-16 02:48:32
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27
湖南大学学报·自然科学版(2014年2期)2014-12-25 14:06:15
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:40
客车技术与研究(2014年5期)2014-02-28 08:48:29
