基于BP神经网络WIFI辅助IMU室内联合定位
2021-11-17 07:37袁国良朱若琪
计算机仿真 2021年7期
李 彪,袁国良,朱若琪,谢 奎
(上海海事大学信息工程学院,上海 201306)
1 引言
近年来,人们对基于位置的服务(Location-Based Services, LBSs)需求急剧增加,移动定位技术成为研究的热点,其中室外定位技术已经十分成熟,如全球定位系统(Global Position System, GPS)、北斗等,并且已经达到较高的定位精度,能够有效地满足用户在室外环境中对精确性的需求,然而在室内环境中,诸如消防员定位、物流管理、大型商场的位置服务等应用需要更稳定的定位技术。GPS导航在室内环境下,因建筑物的遮挡,仅有4.5%的时间获得可靠的GPS信号[1],不能适用于室内定位场景,因此,如何实现高效精确的室内定位已成为研究的热点和难点之一。
目前,研究人员致力于部署更加灵敏且精确的室内定位系统[2-3],现在主流的室内定位技术有超宽带(Ultra-Wide Band, UWB)定位技术,无线局域网(Wireless Local Area Network, WLAN)定位技术,基于自包含传感器的航位推算法(Dead Reckoning, DR)定位技术等。文献[4-6]提出了基于超宽带定位技术,取得了较高的定位精度,但此方法需要为智能终端增加相应的硬件设备,同时也给无线网络带来了额外负担,此方法对条件要求苛刻,很难普及。利用IMU模块进行定位具有不受环境影响,稳定性高的特点,但是航向角在环境的影响下,随着时间的推移会出现较大的误差,步态的判断及步长的计算误差也会导致惯性定位无法长时间准确定位[7],如今对WIFI定位技术已有深入的研究[8-10],文献[11]通过MAC地址对无线接入点(AP)进行过滤,选取固定的参考AP获取位置指纹信息,并结合改进的K最近邻匹配算法,进一步减小定位误差,定位精度可达到2m左右,能够满足一般定位需求,但是鲁棒性较差,当周围WIFI信号较弱或者AP点较少时,定位效 果就大打折扣。单一定位方法不可避免有些缺陷,当下应用多种方法联合定位是一个发展趋势[12-13]。
笔者综合分析了基于IMU的定位技术和基于WIFI无线网络的定位技术的优缺点以及前人的研究成果,提出了基于BP神经网络的WIFI辅助IMU室内联合定位技术。在联合定位模型中,WIFI指纹定位技术可以提供初始位置信息,并实现周期性的纠正PDR导航算法的定位结果,减小累积误差的产生;而PDR导航算法[14-15]则可以减小WIFI指纹定位所产生的波动性、减小鲁棒性的产生,提高定位效果。本文在实验部分首先根据定位模型的执行步骤,通过基于BP神经网络的WIFI指纹定位方案获取行人行走的初始位置点坐标,再根据IMU模块采集到的姿态信息求出测试人员行走的步伐长度、步伐数目以及行进方向等信息,通过改进的PDR导航算法得到测试人员行走一段时间后的轨迹信息。模型中提出利用基于BP神经网络的WIFI指纹定位算法周期性的纠正改进的PDR导航定位算法的定位结果,并周期性的更新改进PDR导航定位算法的初始位置点坐标,削弱因长时间定位而产生的累计误差,提高定位结果。
2 基于BP神经网络的WIFI指纹定位算法
WIFI指纹定位可以实现位置坐标与信号强度的映射关系,且若干信号AP节点的信号强度可以唯一的表征指定位置点的坐标信息。由于BP神经网络具有较强的非线性函数映射能力,非常适合用来建立WIFI指纹信息的传播模型。所以结合WIFI指纹信息的特性和BP神经网络的优势,本文提出了基于BP神经网络的WIFI指纹定位算法传播模型,并通过大量实验对于该定位算法的可行性和定位效果进行了验证。
目前为止,还没有一种确切的理论作为指导来确定神经网络的具体架构,都是根据经验公式作为依据并进行适当的选择。而经验公式是通过大量的实验分析得到,估算最佳隐含层节点数的经验公式,如式(1)和(2)所示:
Hn=2In+1
(1)

(2)
式(1)和(2)中,In和On分别表示输入层和输出层的节点个数,L为1到10之中的任一常数。根据经验公式可以先选择隐含层节点个数为13,通过网络训练不断的调整节点个数,并不断的比较预测结果,使得预测结果达到最好的效果。表1为隐含层节点数分别为20、25、30、35、40时,预测结果与实际结果比较的误差率大小。经过大量实验的选取和比较,最终经实验结果分析得到隐含层节点数目为32的时候BP神经网络训练的时间最短、输出结果的误差率最低,得到的定位结果也是较为理想的,所以最终确定BP神经网络的网络结构为6:32:2。

表1 不同隐含层节点数预测结果得到的误差对比表
3 基于IMU的改进PDR导航定位算法
本文提出基于IMU模块的定位技术,该技术虽然在短距离的定位过程中可以提供较为准确的定位效果,但是随着行走距离的增加模块在定位过程中产生的误差会累计增加,定位误差也会越来越大,并且基于惯性导航模块无法自动获取初始位置坐标。因此,本文针对惯性传感器导航定位的研究,提出改进PDR定位算法的研究方案,用于提高传统的定位算法的定位精度。改进PDR定位算法的实现流程如图1所示。

图1 改进PDR定位算法的导航定位流程图
在步长计算时,提出利用WIFI辅助步长检测的在线更新算法,提高步长检测的准确性。在航向检测时,提出将IMU模块的坐标系与地理坐标系进行坐标转换,实现对于航向信息的获取,最后通过改进算法的实验,得到实验结果很好的实现了单独定位的需求,为后续联合定位算法的提出做了准备。
3.1 步态检测
在进行步态检测时,文献[16]采用行人行走过程中竖直方向上的加速度数据作为步态检测的依据,但是单轴加速度受到人体姿态变化、外界噪声干扰以及模块测量误差的影响较大。因此,为了改进单轴加速度数据在步态判断的统计误差,实验提出将合加速度作为计步的判决条件。式(3)为合加速度计算公式

(3)
式中,axgx、axgy、axgz分别为X、Y、Z坐标轴上的加速度数据,为合成加速度,图2为合加速度滤波前后的波形变化图。
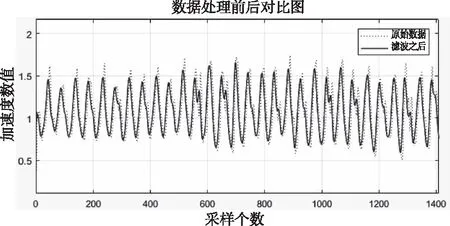
图2 合加速度滤波前后的波形变化图
从图中可以发现,在测试人员开始运动之前保持静止状态时,合加速度数值基本维持在1g/m2,得到的合加速度具有较强的周期性,波形曲线的变化光滑。因此,可以将合加速度作为步态检测的依据。目前基于加速度的行人步态检测算法主要有:穿零法和阈值检测法。经过多次实验测试,分别选取不同行走条件下对提出的改进步态检测算法进行验证,如表2所示为不同行走条件下的测量得到实验结果。

表2 不同行走条件下步数统计对比表
3.2 步长计算
在已知航向的前提下,通过使用基于BP神经网络的WIFI指纹定位周期性的位置点与基于PDR定位算法的推算点处于一条直线上,所以通过对于距离信息和步数信息的准确获取,并且在这段时间内的步数相同,两种定位的轨迹几乎在同一条直线上,因此推出步长的计算公式如(4)式所示
L=D(位移)/n(步数)
(4)
式中,L为所求的步伐长度,D为连续进行WIFI指纹定位算法的两点距离,n为连续两次指纹定位之间的行走步数。
3.3 航向计算
本实验选择地理坐标系作为航向推断的参考坐标系,将地理的东方作为坐标系的X轴,地理的北方作为坐标系的Y轴,选取与水平面垂直的方向作为坐标系的Z轴。陀螺仪传感器获取角度信息之后,通过转化后与地球坐标系的关系如图3所示。

图3 IMU模块和地理坐标系转化示意图
实验选取初始位置点位为(1,4),并通过改进的PDR定位算法进行实验,实验结果选取了定位过程中的五个连续导航阶段如表3所示。第一列为测试的次数,第二列为实时的步长,(X1,Y1)为测试人员行走的坐标点,(X2,Y2)为改进后的PDR定位算法的估计坐标,(X3,Y3)为改进前的PDR定位算法的估计坐标。

表3 改进的PDR导航定位算法的定位结果
通过对于表3中导航结果的分析可以看出,基于改进的PDR定位算法的定位结果在短距离导航过程中能够得到较为理想的导航轨迹。但是随着测试距离的增加,定位误差越来越大,并且基于惯性导航模块的定位模型无法自动获取初始位置坐标,考虑到这些缺点的限制,单独的使用改进的PDR定位算法无法达到室内定位的要求。因此,考虑将该导航定位算法与其它的定位技术进行联合,组成联合的导航定位模型。
4 基于BP神经网络的WIFI辅助IMU室内联合定位模型
本文通过对两种定位算法的优缺点分析后,提出WIFI指纹算法和PDR算法联合定位的模型。在联合定位模型中,WIFI指纹定位技术可以提供初始位置信息,并实现周期性的纠正PDR导航算法的定位结果,减小累积误差的产生;而PDR导航算法则可以减小WIFI指纹定位所产生的波动性、减小鲁棒性的产生,提高定位效果。
通过分析设计出了实现两种定位算法联合的定位模型流程图及系统设计图如图4和图5所示。
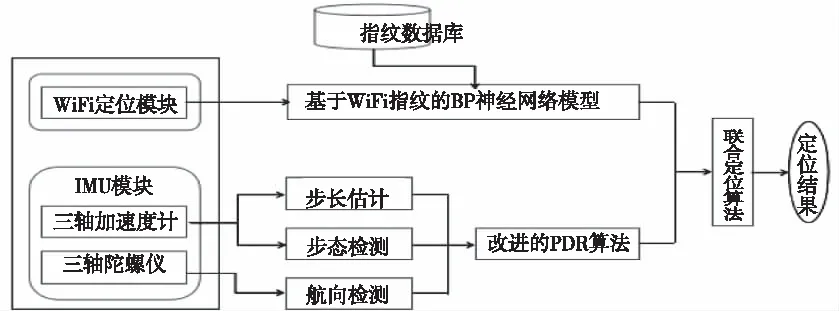
图4 联合定位模型流程图
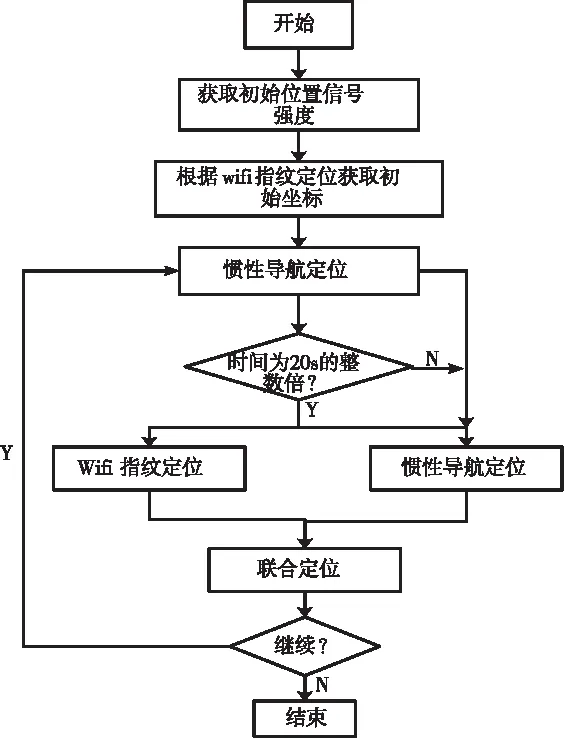
图5 联合定位系统设计图
5 实验结果与分析
为了体现本文提出改进的定位算法的定位效果,分别对三种模式下的定位算法进行导航实验。绘制出了导航轨迹图如下所示。
5.1 基于BP神经网络的WIFI指纹定位算法
图6为基于BP神经网络的WIFI指纹定位算法的导航轨迹图,从图中可以看出,在接收AP相对充足的情况下,获取到的定位结果围绕在实际行走轨迹的两侧,误差维持在两米之内,能够粗略实现定位。但是鲁棒性和定位效果还不够理想,达不到部分行业对室内定位精度的要求,所以单独选取基于BP神经网络的WIFI指纹定位方法有待进一步改进。
5.2 改进的PDR导航定位算法
改进的PDR导航定位算法定位轨迹如图7所示,在惯性导航定位的短距离定位阶段,采用改进的PDR导航定位算法得到的定位结果相对较为准确,但是当测试人员行走过一个直角弯的时候,行走轨迹发生明显的偏移。紧接着测试人员又开始沿着长走廊进行直线行走,但随着时间的推移产生的累积误差越来越大,致使测试人员行走的轨迹越来越偏离实际行走的路线。所以得到单独使用改进的PDR导航定位算法实现的定位结果会随着时间推移逐渐偏离实际轨迹,单独的该定位算法也不能满足室内定位对于定位准确的需求。
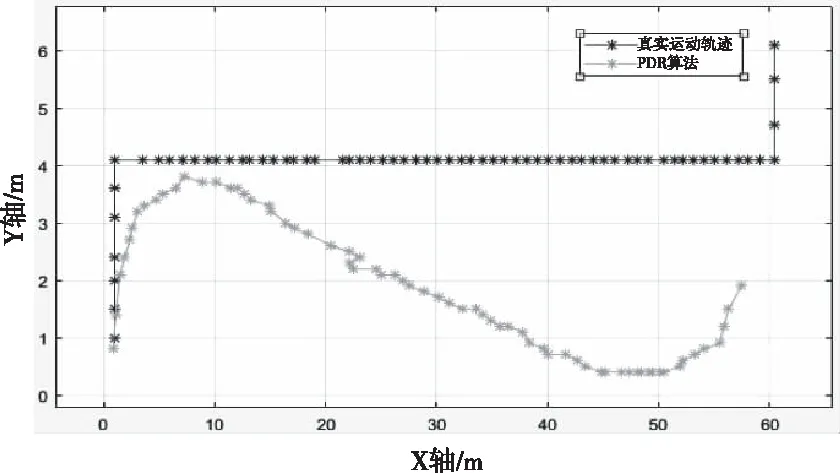
图7 改进的PDR导航定位算法轨迹图
5.3 基于BP神经网络的WIFI辅助IMU室内联合定位模型
本文提出的基于BP-PDR算法的联合室内定位模型的轨迹仿真图如图8所示。根据定位模型的执行步骤,首先通过基于BP神经网络的WIFI指纹定位方案获取行人行走的初始位置点坐标,再根据IMU模块采集到的姿态信息求出测试人员行走的步伐长度、步伐数目以及行进方向等信息,通过改进的PDR导航算法得到测试人员行走一段时间后的轨迹信息。模型中提出利用基于BP神经网络的WIFI指纹定位算法周期性的纠正改进的PDR导航定位算法的定位结果,并周期性的更新改进PDR导航定位算法的初始位置点坐标,削弱因长时间定位而产生的累计误差,提高定位结果。
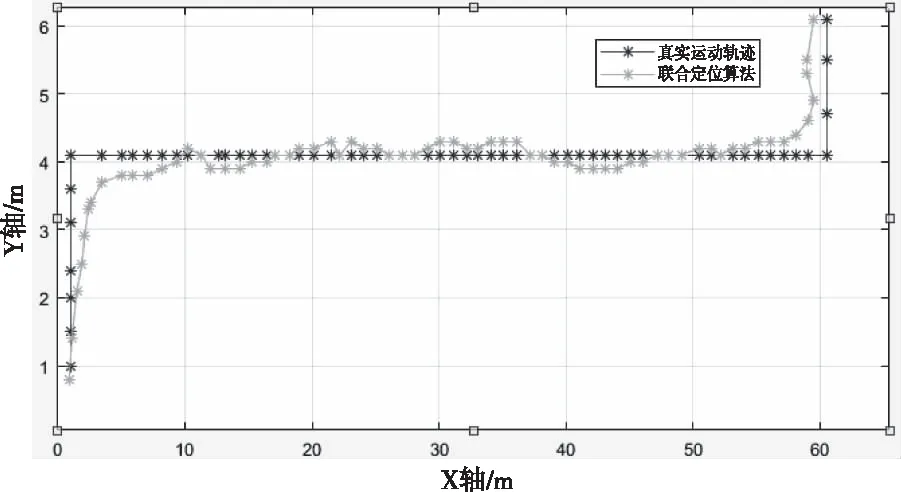
图8 联合定位模型的轨迹图
从实验结果可以得到,单独定位算法的定位结果和实际行走轨迹误差维持在2米以内,而联合定位模型的定位偏差在一米之内,定位效果较为理想,明显的提高了室内定位的精度。尤其在短距离的直线行走定位过程中,改进的PDR导航算法的定位结果较为理想,与实际行走估计偏差较小。当信号AP节点较为充足的情况下按照基于BP-PDR算法的联合定位模型实现定位。当信号AP节点缺少的条件下,使用基于BP神经网络的WIFI指纹定位结果误差较大,不能作为定位的依据,这时结合基于改进的PDR定位算法的惯性导航定位结果作为当前定位的结果,直到获取到至少三个AP节点的信号强度,再从该点继续使用基于BP-PDR定位算法的联合定位模型。
6 总结
针对现有室内定位技术精度不高的问题,作者深入的分析了目前主流室内定位技术的优缺点,确定使用联合技术来弥补单个技术存在的不足,来提高定位的精度。在本文中提出了BP神经网络与WIFI指纹定位技术相结合的算法模型,并通过大量实验验证了技术联合的可行性。本文针对惯性传感器导航定位存在误差累积的现象,提出改进PDR定位算法的研究方案,用于提高传统的定位算法的定位精度。最后,本文将以上已经验证过的改进方案进行联合,提出了基于BP神经网络的WIFI辅助IMU室内联合定位模型。通过实验可看出使用基于BP神经网络的WIFI辅助IMU室内联合定位技术对室内定位精度的提升有了很大帮助,从而证明了此项联合技术的有效性和可行性。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
求学·理科版(2021年10期)2021-10-11
福建中学数学(2021年1期)2021-02-28
小资CHIC!ELEGANCE(2021年44期)2021-01-11
小天使·一年级语数英综合(2020年10期)2020-12-16
电脑知识与技术(2017年31期)2017-12-11
儿童时代·快乐苗苗(2016年2期)2016-10-22
青少年科技博览(中学版)(2015年7期)2015-08-12
婚姻与家庭·性情读本(2015年7期)2015-07-21