基于ADAMS的多功能护理床起背机构参数优化*
2021-11-15 02:41:44周有明俞成涛刘凯磊李奇林丁兆轩
南方农机 2021年21期
周有明 , 俞成涛 , 刘凯磊 , 李奇林 , 丁兆轩
(江苏理工学院机械工程学院,江苏 常州 213001)
0 前言
随着社会的发展以及人民生活水平的不断提高,老年人和残疾人的护理问题越来越受到社会的关注,对护理质量提出了更高要求,因此,多功能护理床应运而生[1]。目前,国内外的研发公司、科研机构以及高校等对多功能护理床开展了相关研究。瑞典Arjo Huntleigh公司开发了一种带有自清理和除菌功能的Enterprise9000护理床,不仅实现了护理床的基本功能,还能监控被护理人员的生理信息并由控制板显示[2]。南昌大学的白建军[3]研发了一款双层床面结构的多功能轮椅床,以控制不同床板来实现坐起、屈腿和侧翻等功能。此外,殷晓冬等[4]和刘长生等[5]开展了助浴医疗、姿态可调等方面的研究。从国内外的研究来看,多功能护理床已由最初的手动控制发展到电动控制,但是有关多功能护理床的研究主要集中在护理床的整体结构设计和控制系统设计,对于多功能护理床的起背机构关键参数优化的研究较少。
因此,课题组将以多功能护理床的起背机构为研究对象,分析起背运动过程中影响舒适度的关键因素,并提取优化目标,采用ADAMS软件对起背机构进行参数化建模与运动学仿真,从而获得参数优化设计,以改善多功能护理床起背运动过程中的舒适度。
1 结构组成、工作原理及特性分析
多功能护理床的起背机构如图1所示。起背机构由座板、背板、起板、连接板等组成,该起背机构采用双电机驱动,连接板1绕点A转动,起板6绕点E转动,连接板1分别与座板4、背板5铰接,并且背板5与起板6滑动。其工作原理:电机1安装于点A,带动连接板1转动,电机2安装于点E,起板6作为主动件通过滑动带动背板5进行起背、落背动作。
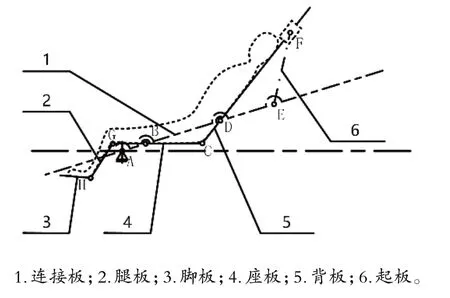
图1 起背机构运动简图
多功能护理床的起背机构不仅要满足运动要求,以达到预定的运动轨迹或者运动规律,也要满足老年人和残疾人的舒适需求。文献[6]在抬背机构中,进行了抬背架角位移、角速度以及角加速度等主要参数的研究。对于起背机构而言,考虑其舒适度问题,要保证起背运动过程中各参数变化平稳且避免各参数发生突变。课题组主要分析起背过程中对角加速度的影响,进一步优化设计以及选取适当的驱动电机,以改善多功能护理床运动过程中的舒适度。
2 起背机构的仿真分析
2.1 起背机构几何模型
如图2所示,采用SolidWorks对多功能护理床的起背结构进行建模,并将其模型导入到ADAMS/view软件中,由于ADAMS中的建模能力相对较弱,而通过其他三维软件导入的模型无法进行后续的参数化设计,因此需要简化起背机构模型。起背机构中各铰接点位置的设定是优化设计中关键的一步,为了得出该机构的最佳位置,分别对铰接点的X、Y坐标为设计变量进行参数化建模,如表1所示。

图2 起背机构参数化模型
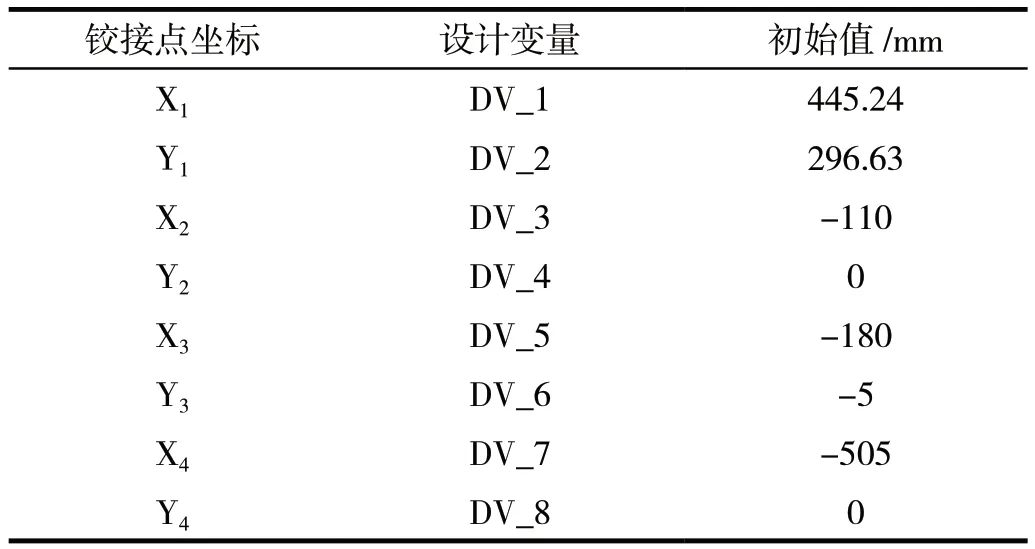
表1 坐标点和设计变量对应关系
将设计变量代替铰接点坐标值,根据铰接点建立各构件,并在各铰接点添加运动副,建立起背机构参数化模型。
如图3所示为优化前起背机构角加速度随角度变化曲线,其角加速度不平稳,而且随着角度增大,其角加速度变大。因此,在实际运行过程中起背速度将随着角度增加逐渐变大,这将严重影响老年人和残疾人在使用多功能护理床起背运动过程中的舒适度。

图3 优化前起背机构角加速度随角度变化曲线
2.2 设计研究
课题组设定了8个可能影响起背机构角加速度的设计变量,分别是DV_1~DV_8,其取值范围如表2所示。

表2 设计变量取值范围
其中各个设计变量对角加速度的灵敏度均不同。对此,可在优化之前通过设计研究得出各个设计变量的灵敏度,通过对比灵敏度较大的设计变量来进行优化。分别对DV_1~DV_8进行设计研究,得出各个设计变量的灵敏度,如表3所示。

表3 设计变量的灵敏度
根据ADAMS优化设计报告,可作出各个设计变量对角加速度影响的趋势图,如图4所示。

图4 设计变量对起背机构角加速度的影响趋势
如表3所示,各个设计变量在初始值位置时得到起背机构角加速度的灵敏度,从图4中可以观察到起背机构角加速度最小值随各个设计变量迭代次数的变化趋势。综合表3和图4,DV_3、DV_5和DV_6对目标的影响较大,因此,下一步主要对DV_3、DV_5和DV_6进行组合试验设计。
2.3 试验设计
试验设计主要的研究思路是对多个影响较大的设计变量重新组合发生变化时,观察目标函数的影响,课题组选取设计变量DV_3、DV_5和DV_6组合作为设计变量进行试验分析。如图5所示为DV_3、DV_5和DV_6对目标函数的影响曲线图,如图6所示为DV_3、DV_5和DV_6组合时对目标函数的影响曲线图。
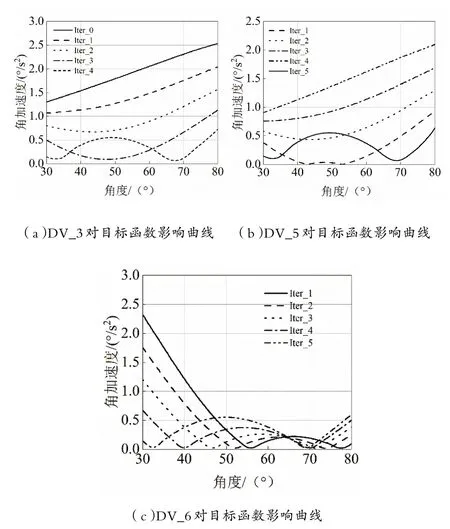
图5 DV_3、DV_5和DV_6对目标函数影响曲线
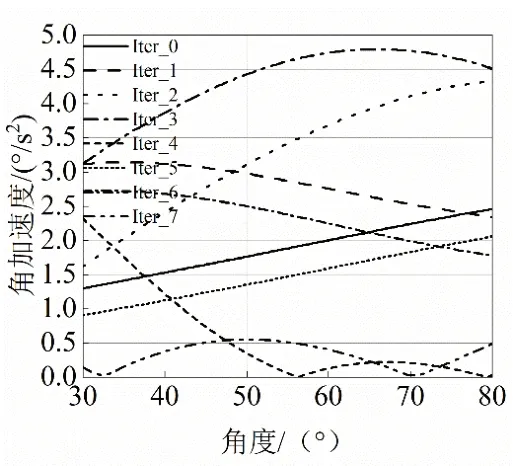
图6 DV_3、DV_5和DV_6组合时对目标函数影响曲线
如图6所示,当设计变量DV_3取值在-120 mm~-110 mm,DV_5取值在-180 mm~-155 mm以及DV_6取值在-5 mm~7.5 mm时,目标函数角加速度处于优化区域,为后续优化设计提供重要依据。
2.4 优化设计
通过ADAMS可以设置算法类型、迭代次数、收敛精度及输出控制等,也可以自定义算法接入ADAMS以满足用户的各种需求。优化过程中起背机构角加速度的变化曲线如图7所示,优化设计结果如表4所示。

图7 优化起背机构角加速度变化曲线
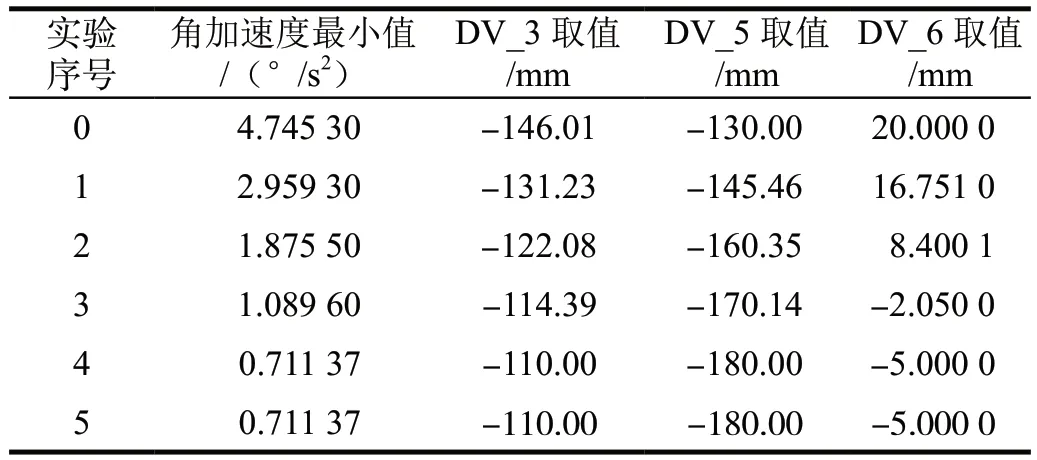
表4 优化设计结果
由表4可知,5号优化实验时角加速度最小值最小,此时的角加速度最小值由4.745 3 °/s2降低为0.711 37 °/s2,背板从30°旋转到80°时所需时间T=12.5 s,则角速度为

文中优化合理,优化后DV_3、DV_5和DV_6取值分别为-110.0 mm、-180.0 mm和-5 mm。优化前后起背机构加速度变化曲线对比如图8所示。
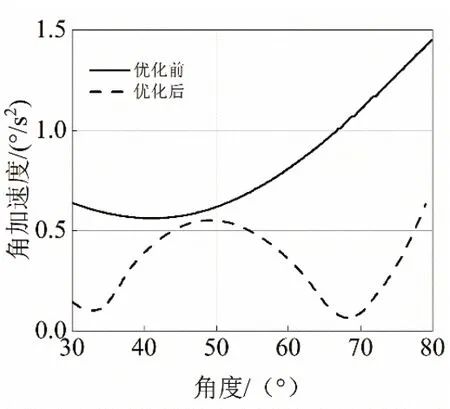
图8 优化前后起背机构角加速度随角度变化曲线
由图8的对比曲线可知:通过不断改变影响较大的设计变量参数来寻找最优值,优化后起背机构角加速度最小值显著降低,并且角加速度曲线出现多次平滑,有助于提高老年人起背时舒适度。
3 结论
1)DV_1~DV_8对起背机构角加速度的灵敏度均不同,且起背机构运动过程中,组合试验设计对目标的影响最大。
2)DV_8对起背机构角加速度的灵敏度最低,说明起背机构在Y轴方向对角加速度影响较小,主要原因是背板支架与起板支架之间滑动受力上,其X轴方向上所受的分力要远远大于Y轴方向上所受的分力。
3)通过不断改变影响较大的设计变量参数来寻找最优值,优化后的机构大大降低了角加速度,并且角加速度曲线出现多次平滑,在运行过程中提高了护理床的舒适度,能够更好地帮助老年人进行起背动作。
猜你喜欢
纺织科学研究(2021年9期)2021-10-14 08:52:12
铁道通信信号(2020年1期)2020-09-21 08:55:16
液压与气动(2020年4期)2020-04-10 07:38:52
制造技术与机床(2018年12期)2018-12-23 02:40:50
新课程·下旬(2018年10期)2018-01-28 10:56:30
浙江工业大学学报(2017年5期)2018-01-22 02:03:36
成都信息工程大学学报(2017年1期)2017-07-21 14:14:11
探测与控制学报(2015年4期)2015-12-15 15:00:48
计量学报(2014年3期)2014-06-07 10:02:35
当代畜禽养殖业(2014年7期)2014-02-27 07:59:15