融合LSD 算法与Hough 变换的航拍输电线路图像杆塔自动识别方法∗
2021-11-13 08:24庞世强李晓斌张浩民
电子器件 2021年5期
张 俊,庞世强,李晓斌∗,张浩民
(1.广东电网有限责任公司江门供电局,广东 江门 529000;2.江门电力设计院有限公司,广东 江门 529000)
伴随着国民经济的快速发展,对于电能需求进一步增长,由此架空线路的规模逐渐增大。架空线路多处于地貌复杂、交通不便地区且结构较为复杂,人力开展巡检已经无法满足其需求[1-2]。与传统的人工巡视检查方式相比,无人机巡检不仅降低检测成本和人员危险性,而且可以数字化、图像化、三维化。通过航拍建模的方式展示空中视角的架空线路和走廊,很大程度克服人工巡视检查的局限性,因此研究输电线路三维建模技术具有一定的研究价值[3-4]。
近年来,国内外对于无人机航拍图像进行三维建模发展保持着较高水平。利用无人机图像的特征点匹配算法所建立的三维模型仅仅包含架空线路和走廊,并未包含线路杆塔。这是因为与地表物和架空线路不同,杆塔属于镂空结构,难以通过特征点匹配进行建模。强行使用算法建模易造成杆塔结构不全等错误[5-6]。
目前国内外人们对线路杆塔的三维建模进行了许多研究。文献[7]中提出了一种模型驱动的激光点云输电线路杆塔建模方法,利用输电网点云计算和云分布的方向特征,确定输电杆塔的主方向。文献[8]中提出通过对不同类型输电杆塔的现有三维模型进行分解,建立输电杆塔的全要素组件模型库,实现模型库中的不同组件能够根据其固定的连接关系自动拼接。文献[9]提出一种结合塔架结构的分布参数特征模型,它可以应用于具有不同塔架结构和线路参数的短线路。文献[10]基于多视几何进行杆塔三维重建。
本文为实现无人机图像中复杂背景下线路杆塔的准确提取,提出一种自动提取方法。该方法利用RGB阈值法、LSD 算法和Hough 变换,对线路杆塔进行提取,并根据线路杆塔几何特征对直线段编组合并,能够快速、高效地完成对线路杆塔目标的三维建模。
1 算法总体框架
算法设计总体流程如图1 所示,本文为实现复杂图像背景中输电杆塔的准确提取,主要思路首先采用RGB 阈值对于杆塔辐射特征进行粗提取,并结合连通域完成对背景进行初步去除。其次针对线路杆塔在空间中的镂空特征,通过LSD 算法对直线段初步提取,将连通域和LSD 算法的处理结果进行交运算。最后通过Hough 变化将直线段编为一个组别,那么相同组别中线段有无重合或者侧向距离大于一定阈值即可判断是否为同一直线。需要注意的是,直线段端点的连接需设置合适的阈值,且遵循最小二乘拟合原则,则可以提取出完整的线路杆塔。
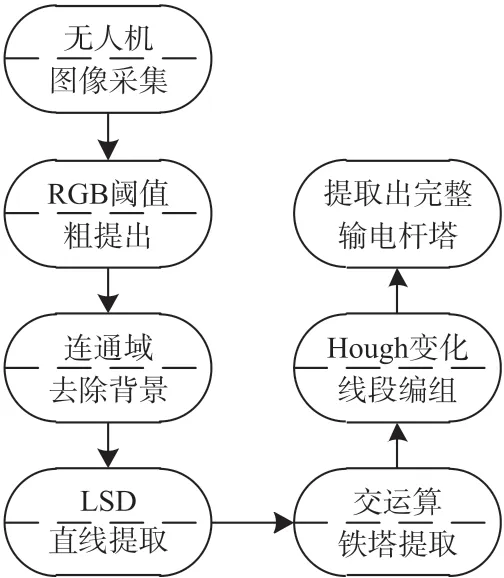
图1 算法设计总体流程
2 边缘检测与直线段提取
2.1 RGB 阈值粗提取杆塔
文献[11]分别通过分析Phong 光照模型,发现在阴影区域的三个通道中,R 通道下降的最多,G 通道次之,B 通道下降的最少,这相当于增加了阴影区域的蓝色分量。本文充分利用了阴影区域的这一属性,通过对彩色RGB 影像进行如下的归一化处理:

式中:R、G、B分别为原始RGB 分量,R′、G′、B′分别为归一化后的RGB 分量。通过前面的分析可知,由于在阴影区域B 通道灰度下降得最少,所以在B′分量中,阴影区域主要占据的是高像素值端,通过对B′分量图采用阈值分割的方法,设置一个较高的阈值就可以得到大致的阴影区域。但原始影像中的偏蓝色地物在B′分量中也具有很高的像素值,需要将这些区域从阴影区域中去除。基于此,本文在原始的B分量图中引入了一个阈值来保证阴影检测的精度。只有在B′分量中高于某个阈值,并在B分量中低于某个阈值的区域,才被检测成为阴影区域[12]。
如图2 所示,铁塔和导线在航拍影像上具有较为明显的辐射特征,利用辐射特征可以排除大部分的背景信息,特别是和铁塔、导线辐射特征差别较大的背景,如地表植被等。本算法采用影像RGB 阈值法,通过阈值的调整和控制达到保留铁塔与导线信息,同时排除大量背景信息的目标。
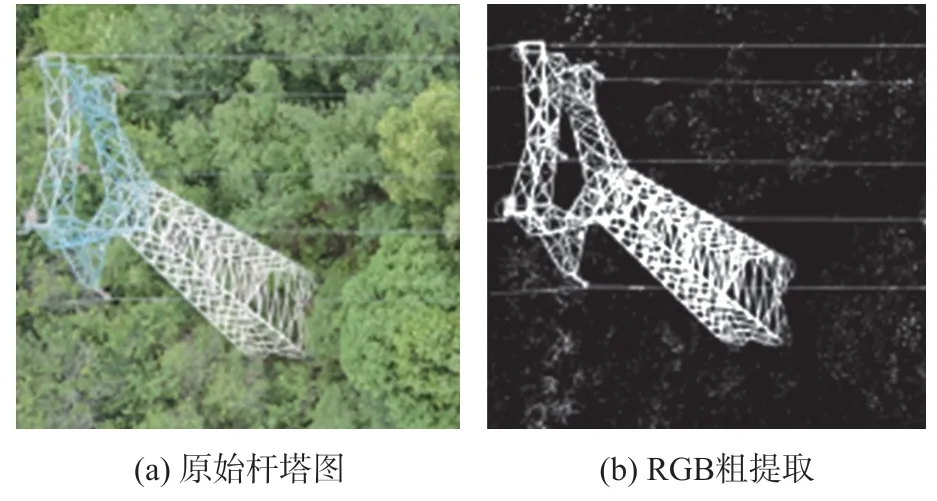
图2 原始杆塔和RGB 提取后图像
2.2 连通域去除背景
由于无植被的裸地或混凝土路面等反射强度大的地方,其辐射特征和铁塔、导线较为相似,上一步使用基于辐射特征直线检测的结果必然仍然带有大量背景信息。但是这种背景信息与铁塔、导线信息相比大都是离散的点,或者非常小的区域。而铁塔塔材连通处众多、导线更是贯穿整幅影像。根据这一特征,本算法根据区域连通性的筛选将那些离散点,短线段和小面积的封闭区域进行去除,最大限度剔除复杂的背景影像信息,如图3 所示。
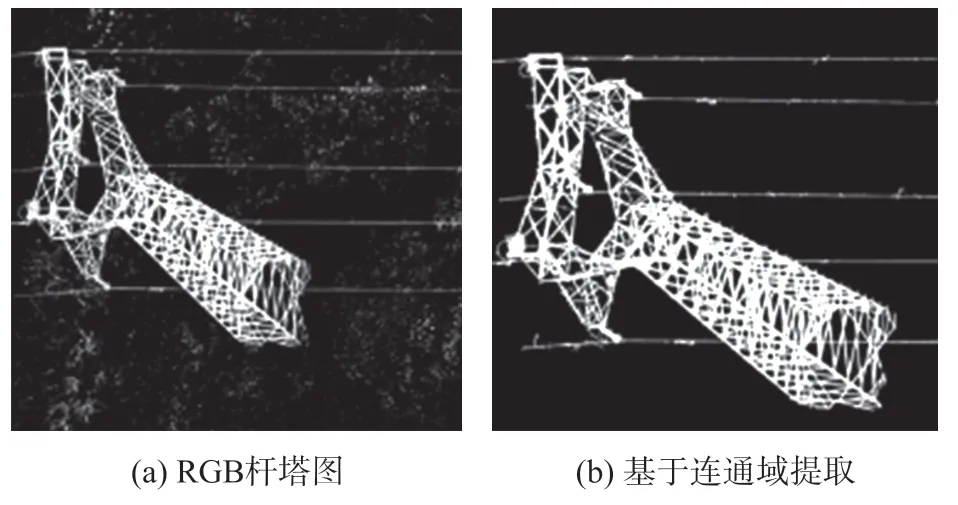
图3 RGB 图像和基于连通域提取后图像
2.3 LSD 算法直线检测提取
LSD 算法的基本思想是检测图像中梯度变化较大的像素点集,因此输入图像必须是灰度图,检测目标即是图像中灰度从黑到白或是从白到黑变化的像素点,以达到在线性时间内获取亚像素精度的线段检测结果。
LSD 涉及到2 个基本概念:梯度和图像的基准线,如图4 所示。LSD 先计算每个像素与基准线的夹角以构建基准线场,然后利用区域生长算法合并场里方向近似一致的像素,得到一系列线支撑域,如图5所示;最后在这些域内进行像素合并提取直线段。

图5 线支撑域示意图
LSD 算法流程如图6 所示,经过LSD 直线提取算法处理,可得所有检测出线段基元的左右端点及线段宽度,如图7 所示。
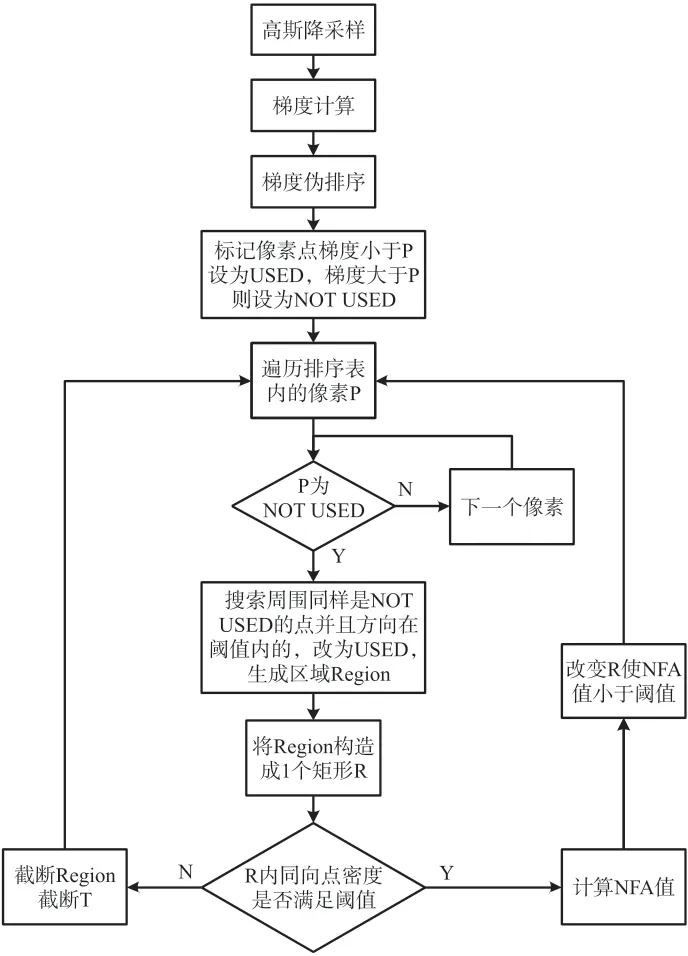
图6 LSD 直线提取算法流程
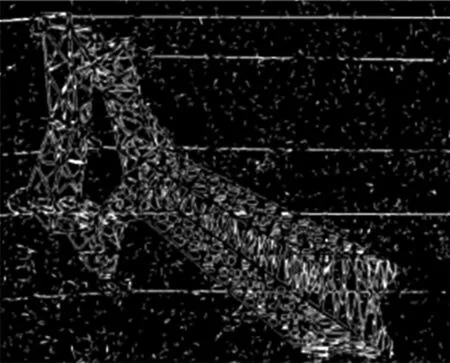
图7 LSD 算法处理结果
但是LSD 直线提取算法还存在一些问题,一方面,在真实图像中,往往由噪声和畸变等影响,致使直线变成有较小曲率的弧线;另一方面,从LSD 像素合并和控制误差的准则可以看出,这种算法只对直线段有用,对其他线结构将失效,如弧段或折线等,即使是曲率较小的弧段也难以有效[14]。
2.4 交运算提取铁塔
LSD 算法有很强的抗噪性。但是,该算法无法排除背景信息的影响,利用LSD 算法的线段检测结果与基于连通性去除背景的提取结果进行“交”运算,即一个像素在两组数据中都为目标时,将其推断为铁塔即提取目标。交运算的处理结果如图8 所示。
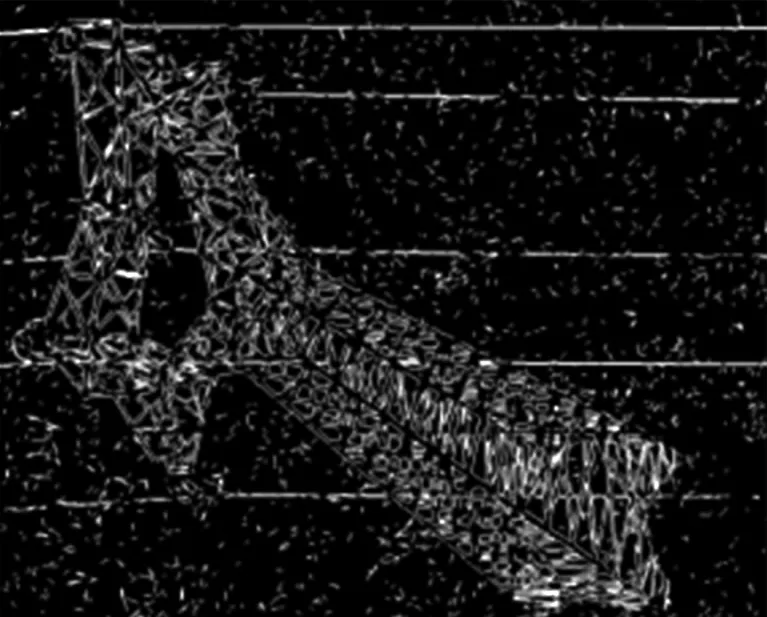
图8 交运算处理结果
2.5 基于Hough 变换的线段编组
Hough 具有良好的抗噪性能,可将具有相同特征的几何图形从灰度图像中分离出来[15]。其主要基于点与线的对偶性来实现直线检测,极坐标系下直线方程表示为:

平面直角坐标系下任一点的坐标(x,y),对应于与极坐标系下的过点(ρ,θ)的正弦曲线,而直角坐标系下同属于一条直线上的点在极坐标系下会出现交集。首先,由定义θ∈[0,180),ρ表示为坐标原点到该直线的距离,那么可以根据每一个点(x,y)及离散的θ值将ρ计算出来,通过累计所有的(ρ,θ)可以获得最终的权值,并选择其最大值,记作Am(ρ,θ)。如果Am(ρ,θ)的值大于设定的阈值,即可以找到直角坐标系中直线的位置。Hough 变换原理分析如图9 所示。
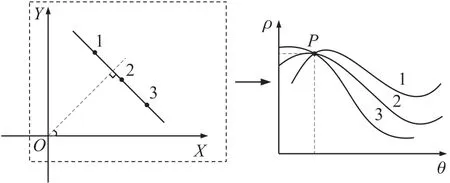
图9 Hough 变换原理
由以上分析可知,直线检测的Hough 变换可以定义为:
式中:A(xi,yj)表示提取的每个像素的灰度值,Q是关于ρ的总体样本数,P是所取离散的θ总数,二值图像尺寸则定义为N×N。
将Hough 变换应用于基于RGB 阈值后的二值图像,如图10 所示。由于初始图像中背景信息较单一,且无其他的线性干扰,可以看到使用Hough 变换能够使一些处于相同直线的短线段得到了较好的连接,但对于杆塔背景图像复杂程度提升,要想获取图像中的完整的杆塔,仍有必要对初步提取后的线路作进一步处理。

图10 Hough 变换二值图像直线提取
4 实验验证
为验证本文采用以上算法能够准确提取出航拍图像中复杂背景下的线路杆塔,实验针对无人机的输电线航拍杆塔图像信息,采用本文所提出的算法分别对酒杯杆塔、干字塔进行建模分析对比。最终可得实验效果对比如图11 所示。
图11 实验结果分析
表1 统计部分杆塔实测与建模结果的最大误差,可以看出,水平偏差最大仅为0.132 m,垂直偏差最大仅为0.268 m,反映出本研究三维重建的立体模型精度是很好的。由以上结果可以看出,当图像背景信息比较复杂时,使用本文所设计的算法,如图11(b)、11(c)所示,所提取的线路杆塔受背景信息干扰较小,最终得到的线路杆塔图像较为清晰,且未出现破碎,验证了该算法能够实现复杂背景图像中线路杆塔的准确、完整的提取,有利于架空输电线路设备本体的三维模型建立,可进一步丰富当前建模平台化应用。

表1 部分杆塔建模点与实测点对比
5 结论
本文设计了一种基于无人机图像的线路杆塔自动提取算法,能够从复杂的背景图像中完成线路杆塔的有效识别,进而达到三维建模的要求。首先由RGB 阈值结合连通域对图像中杆塔进行初步提取,再经LSD 算法直线分割检测和交运算,最后通过Hough 变换线段编组合并最终完成线路杆塔的提取过程。由实验结果可知,该方法能够有效削弱复杂的背景噪声的干扰,且基于线路杆塔镂空特征进行合并,进一步实现了线路杆塔准确、完整的提取,验证了此方法的有效性。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
卫星应用(2022年1期)2022-03-09
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
红领巾·萌芽(2019年8期)2019-08-27
电子制作(2019年11期)2019-07-04
中国与非洲(法文版)(2017年10期)2017-11-23
贵州师范学院学报(2016年4期)2016-12-01
电测与仪表(2016年23期)2016-04-12
CHIP新电脑(2016年3期)2016-03-10