船用消防机器人及可靠性数据研究
2021-11-12 09:03:24卫能叶国文
电子产品可靠性与环境试验 2021年5期
卫能,叶国文
(1.工业和信息化部电子第五研究所,广东 广州 511370;2.芜湖赛宝机器人产业技术研究院有限公司,安徽 芜湖 241003;3.安徽工程大学机械工程学院,安徽 芜湖 241000)
0 引言
目前船用消防系统存在以下短板:由于消防系统较为分散,火点定位的精度不够高和对死角火源无法精确地判断等问题。这样就导致了早期火灾无法得到及时的扑救,参与救火的人员人身安全风险增大。针对船用消防系统的短板,需要研制船用智能消防机器人,以提升船用的整体火灾安全性,保障船用设备安全。关于消防机器人,青岛科技大学的徐连伟[1]对消防机器人的控制系统进行了相关研究;华滨[2]对消防机器人的研发与产业化进行了相关研究;武汉科技大学的宋佳庆[3]对消防机器人进行了动力学分析与驱动系统研究;南昌大学的熊根[4]对消防机器人进行了仿真。在可靠性方面,代卫卫等[5]采用威布尔分布模型对刮板输送机的寿命模型进行了验证;穆艳等[6]提出了用最小二乘法确定威布尔分布模型的具体参数;曹克强等[7]提出了采用最小二乘法和相关系数法相结合的方法估计三参数威布尔分布的参数;YANG等[8]采用三参数相关系数运用优化方法增强了威布尔分布模型,大大地提高了混合分布可靠性模型的精度;DUFFY等[9]描述了三参数威布尔分布的非线性回归估计量,并使用蒙特卡洛模拟方法,对与这些估计量相关的偏差和不变性相关的问题进行了数值研究;Ying等[10]采用混合威布尔分布模型对曲轴系统的失效数据进行了分析;YANG等[11]提出了一种双重威布尔分布的混合模型,并分析了数控滚齿机的故障特性。为了确保消防机器人质量符合要求,完全适用本项目易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场的装备,满足进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈的任务需求,对消防机器人进行了可靠性计算及对所计算的结果进行了相应的分析。
1 结构介绍
该消防灭火机器人的硬件由底盘、消防炮、水幕防护系统、耐火水龙带、探测系统、控制系统和通讯系统七大部分组成。
对于船用机器人的底盘采用大功率直流减速电机、伞齿轮减速增力器、传动轴和驱动轮构成消防机器人的行走机构。根据采集到的各种外部环境数据,进行机器人姿态调整;系统通过实时地接收局部行为规划结果,进行动力学建模,将接收到的指令分解到各个电机上,从而实现设备的正常运行。机器人采用48 V、100 Ah的电池容量设计,机器人设计行进速度为0~2 m/s,行驶里程为7 km,控制距离为3~6 km。其底盘系统如图1所示。
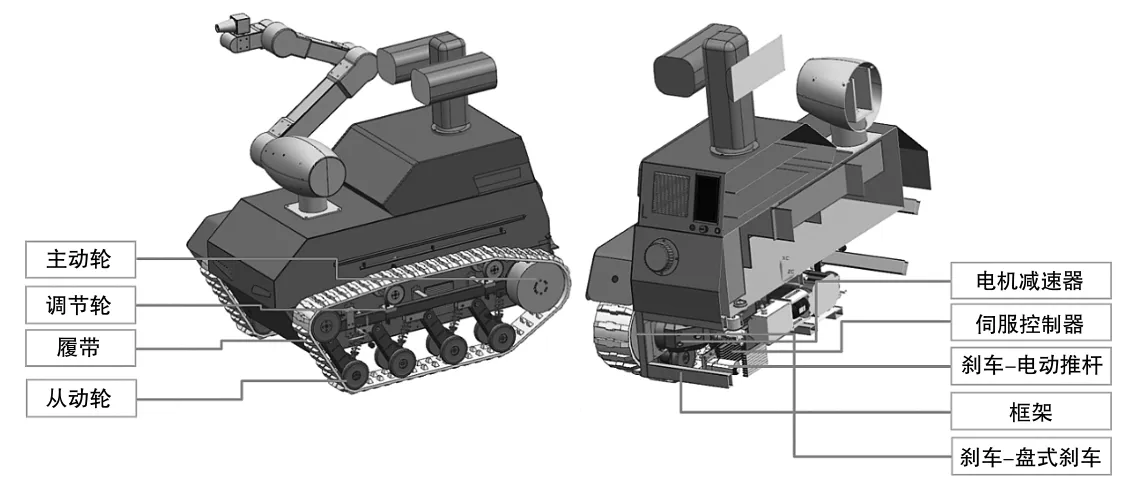
图1 研制的机器人底盘系统组成示意图
探测系统主要由气体检测仪、红外双视摄像头、避障雷达、温度传感器、温度控制器、激光器、激光传感器、滤波器和温度报警卡构成。
控制系统主要由PLC控制器、铝壳恒压12 V电源(150 W)和电源NES-50-5 V构成。
通讯系统主要由图传天线、采集器、接收器和滤波器构成。
消防机器人的整机结构如图2-4所示。

图2 机器人整体结构图(一)

图3 机器人整体结构图(二)

图4 机器人整体结构示意图(三)
整机系统如图5所示。

图5 整机系统
由于组成整机系统的底盘、消防炮和耐火水龙带是机械件不易损坏,故其平均无故障间隔时间(MTBF)比电器件高得多,暂不考虑其可靠性。组成整机系统的水幕防护系统、探测系统、控制系统和通讯系统的各个部件名称及个数如表1所示。

表1 组成部件
2 可靠性预计
对消防机器人功能性原理进行分析,找出各个部件间的可靠性逻辑关系,用可靠性框图描述。该消防灭火机器人的硬件为串联模型,其框图结构如图6所示。

图6 消防机器人可靠性框图
机械件的失效率根据其型号和工作环境类别参考NPRD-91,电子元器件的失效率参考GJB/Z 299C,机械件和电子元器件的寿命分别服从威布尔分布和指数分布,其失效率如表2所示。

表2 消防机器人中部分元件失效率
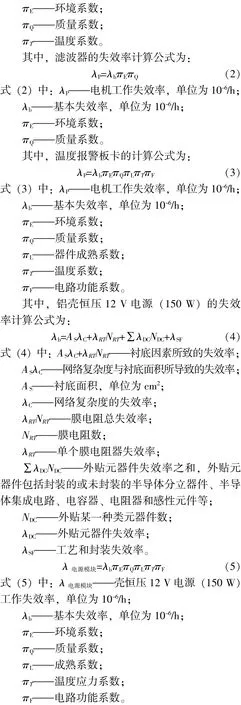
其中,温度传感器的失效率计算公式为:

式(1)中:λP——温度传感器工作失效率,单位为10-6/h;
λb——基本失效率,单位为10-6/h;
经过一系列计算后得出各个模块的可靠性指标如表3所示。

表3 各个模块的可靠性指标

3 结束语
通过一系列的计算,得出了消防机器人的MTBF和失效率λ,为使用者提供了相应的参考。
以产品的寿命特征作为其主要研究对象,通过使用概率统计的方法的理论,研究消防机器人系统的可靠度,从而达到提高系统可靠性的目的。
对消防机器人的易损坏模块提供了对应的可靠性指标,可以进一步地探索消防机器人的故障规律,定位消防机器人在可靠性方面所受影响的关键因素,进而帮助提高消防机器人的产品质量。
猜你喜欢
化工管理(2023年17期)2023-06-16 05:56:54
舰船科学技术(2022年22期)2022-12-13 03:36:14
数学物理学报(2022年2期)2022-04-26 14:08:46
山东冶金(2022年1期)2022-04-19 13:40:40
计算机与数字工程(2019年7期)2019-07-31 09:55:10
幽默大师(2019年4期)2019-04-17 05:04:56
幽默大师(2019年3期)2019-03-15 08:01:06
幽默大师(2018年11期)2018-10-27 06:03:04
幽默大师(2018年3期)2018-10-27 05:50:48
柴油机设计与制造(2018年3期)2018-10-13 01:45:06