弹目相对状态测量误差对拦截效果的影响分析
2021-11-11 05:59张涛涛方登建
系统工程与电子技术 2021年10期
张涛涛, 方登建, 李 静, 申 森
(海军工程大学兵器工程学院, 湖北 武汉 430033)
0 引 言
随着卫星、雷达、通信、控制等技术快速发展,世界各大国在弹道导弹攻防之间的竞争日趋激烈,区别于传统单点、单系统对抗模式,涵盖预警探测、指挥通信、多层拦截弹的系统体系对抗已成为其显著特点。在高精度、高速度、高强度的对抗环境下,为实现更高的拦截成功率,对拦截导弹制导控制能力提出了更加严苛的要求。
影响拦截弹拦截效果的因素有很多,如中末交班误差、弹目相对状态测量误差、导引头测量误差、加速度饱和限制、制导控制延迟等[1],这些因素误差蕴涵于拦截弹的各关键组成部分,是需重点提高的技术指标。国内外学者针对上述误差因素对拦截弹的影响开展了大量研究,Li等在视线旋转坐标系建立了大气层外弹目相对运动方程,并对适用于大气层外拦截弹的理想比例制导律、微分几何制导律进行了研究[2-3];Hablani对影响大气层外拦截弹脱靶量的关键因素进行了分析[4];Elina对拦截弹零控脱靶量估计误差的问题开展了研究[5];Chai等基于可达集模型研究分析了大气层外拦截弹末制导性能[6-8];Gelb研究了一种基于非线性系统协方差分析法研究导弹末制导性能的方法[9]。在中末交班研究方面,主要以高超声速目标拦截、防空导弹等为研究背景,对中末交班制导律[10-13]、目标机动预测及导引头搜索算法[14]、交接班窗口[15]、捕获概率[16]等问题进行了研究。此外,学者还对拦截过程中视线转率变化规律[17]、来袭目标采用诱饵干扰对抗[18-19]、控制延迟[20]、导引头测量误差[21-22]、拦截脱靶量[23-27]、制导控制效能[28-30]等方面开展大量了工作。但针对拦截弹中末交班误差产生机理、弹目相对状态测量误差传播及对拦截效果的影响分析尚少,本文基于协方差描述函数法对末制导过程中误差传播过程及脱靶量变化进行分析。
1 中末交班误差产生及传播分析
对于弹道导弹防御系统,来袭导弹发射后,会统筹调度预警卫星、远程预警雷达、制导雷达等预警探测器对来袭目标发现、捕获、跟踪,并通过指挥控制系统进行信息综合处理进而实现对来袭导弹打击目标、飞行弹道等重要数据的解析、判断及预测,当被打击目标满足导弹防御系统设定的保护等级,且拦截弹部署基地与来袭导弹间满足拦截几何关系具备拦截条件的情况下,弹道导弹防御系统会向拦截弹子系统下达拦截指令,并继续引导拦截弹实施拦截。
拦截弹的制导控制过程可分为初制导、中制导、末制导3个阶段,如图1所示。初制导指拦截弹从发射点火后到发动机工作的助推段,以及为满足分离位置、速度、姿态进行的末修段等;中制导指拦截弹初制导结束至导引头捕获目标的飞行阶段;末制导指中制导结束至对目标实现拦截的飞行阶段。在拦截过程中,中制导的目的是通过一次或多次弹道修正,为末制导提供比较精确的拦截几何,但是由于中制导段弹目相对距离较远,测量信息主要依靠地面探测设备,精度有限,且拦截弹也存在初始对准误差、弹上惯性器件积累误差、级间分离误差等,最终体现在交班时刻,因此拦截弹进入末制导段时包含了一定的弹目之间相对运动状态的测量误差。本文在分析计算中使用弹目相对位置误差球半径σr、相对速度误差球半径σv表示弹目之间相对运动状态的测量误差。
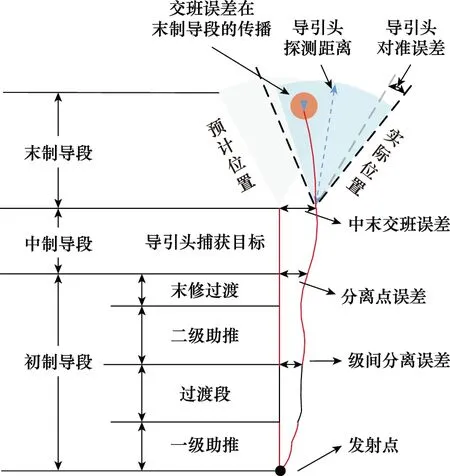
图1 中末交班误差产生示意图Fig.1 Emergence of midcourse-terminal handover error
在图2中用σ0、σ1、σ2、σ3表示拦截弹点火初始时刻、助推结束时刻、中制导开始时刻、中制导结束时刻无控条件下的弹目相对误差椭球,在该条件下,拦截弹误差椭球随着飞行时间的增加不断扩大。在有控条件下,尤其经过拦截弹末修级的修正,弹目相对误差椭球明显缩小至σ2m;进入中制导,主要测量数据依旧为地面设备及自身惯导数据,由于对目标数据跟踪时长增加,滤波精度提高等原因,弹目相对误差椭球继续缩小至σ3m;进入末制导后,其测量精度较之前有较大的提升,且弹目相对距离也较小,在拦截弹在制导控制系统的工作下能够将误差椭球控制至拦截范围,从而实现对来袭目标的拦截。
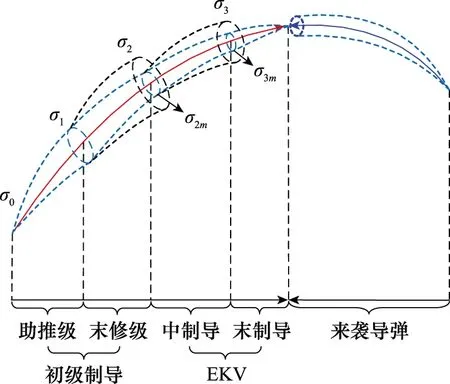
图2 拦截弹飞行过程误差传播过程示意图Fig.2 Interceptor error propagation process
2 拦截弹末制导误差传播分析建模
2.1 拦截末段弹目视线转率解析推导
在拦截弹导引头捕获来袭目标后拦截进入末制导阶段,此阶段将拦截弹与来袭导弹均视为质点,此时,弹目相对拦截几何如图3所示。
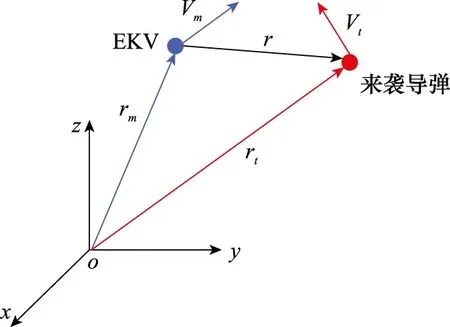
图3 拦截弹与来袭导弹的相对状态Fig.3 Relative state between interceptor and target missile
图3中下标m代表拦截弹相关参数,下标t代表来袭导弹相关参数。矢量r代表相对位置矢量,由图3可知:
r=rt-rm=rer
(1)
式中:r为弹目相对距离;er为视线方向的单位矢量。对式(1)进行两次求导并化简可得到视线旋转坐标系下弹目相对运动方程[3]:
(2)


(3)
由式中前两式可得到瞬时旋转平面内的视线转率变化
(4)
2.2 弹目相对状态测量误差与视线转率初始误差的转换模型
2.2.1 视线转率与相对运动状态关系
拦截弹与来袭导弹相对位置r和相对速度V在地心坐标系下可表示为
(5)
式中:x0、y0和z0为地心坐标系3个单位向量;rx、ry、rz、vx、vy、vz分别为相对位置、相对速度在3个方向的投影分量。
根据视线转率定义以及弹目相对状态可得
(6)
令m=V·r=rxvx+ryvy+rzvz,则式可化简
(7)

2.2.2 协方差转换方法
协方差转换矩阵用于表示具有某种函数对应关系的参数之间均值与方差的对应转换方法。假设状态矢量分别为x、y,它们之间关系为
y=f(x)
(8)
状态矢量x的均值mx和协方差矩阵Px为
(9)
则状态矢量y的协方差矩阵Py为
Py=E[(y-my)(y-my)T]=
(10)
式中:偏导数矩阵∂y/∂x称为雅克比(Jacobian)矩阵,可以表示为
(11)
式(11)可表示为
Py=JPxJT
(12)
式(12)是对协方差矩阵Px进行相似变换,矩阵J是正交矩阵,有J-1=JT,且det(J)=1。
2.2.3 弹目相对状态测量误差与视线转率初始误差转换解析模型
令弹目相对状态测量误差中相对位置、弹目相对速度分别包含了半径为σr、σv的误差球,且其在地惯系下3个方向的协方差矩阵可表示为
(13)
式中:Prv代表弹目相对位置、速度交班误差的协方差矩阵;下标r表示位置,下标v代表速度,下标x、y、z代表地心惯性坐标系的3个方向。由式(7)及式(11)可求得视线转率对相对位置、相对速度各分量的偏导数如下:
(14)
--------------------
由此可得弹目相对状态测量误差与视线转率初始误差的Jacobian变换矩阵:
(15)
相对位置速度误差同视线转率误差关系为
Pωs=JPrvJT
(16)
2.3 视线转率误差传播模型
在末制导段,拦截弹通常采用小视线角比例导引的控制方法对来袭导弹进行接近,在末制导段相对距离较小时,脱靶量可近似表示为
(17)
由式(17)可知,脱靶量的计算主要受视线转率误差、相对距离误差、相对速率误差影响,交班误差、测量误差、控制精度误差等多项误差最终通过影响视线转率最终影响脱靶量。下面推导视线转率误差传播模型。

(18)
(19)
对于理想限幅器的可将其线性化为
(20)
(21)
式中:PI(u)与G(u)函数为
(22)
不考虑制导周期内系统受连续随机噪声影响,根据离散连续混合系统协方差描述函数法[9]可得系统状态变量在一个周期tk (23) -------------------- 在tk时刻,制导控制模块对离散状态变量进行测量和滤波计算,以形成新的制导指令作用于整个系统,tk时刻系统各状态变量的均值mk/k和协方差Pk/k如下: (24) (25) 由上述分析可知,弹目相对状态测量误差、导引头测量误差、加速度饱和限制等影响因素综合体现在末制导段弹目相对视线转率误差的控制和传播过程中,据此本文的计算流程为基于第2.2节建立的弹目相对状态测量误差与视线转率初始误差转换模型,计算得到视线转率误差传播初值,在此基础上利用第2.3节视线转率误差传播解析模型进行积分计算可得视线转率变化情况,最终利用脱靶量与视线转率之间的关系可得到拦截效果变化,解析计算流程如图4所示。 图4 拦截弹末制导误差传播对拦截效果分析计算流程Fig.4 Calculation process of interceptor terminal guidance errorpropagation analytical 影响拦截弹末制导误差传播影响有关参数设置如下:拦截弹的机动加速度限幅为6g,来袭目标机动加速度为常值且沿垂直弹目视线方向,即at=atθ=g;拦截弹制导控制周期为0.01 s,比例导引系数N=4,视线转率估计误差σs,est=0.2 mrad/s,蒙特卡罗打靶次数为300次;盲区距离300 m;相对位置速度误差取σr=50 m,σv=2m/s。 假设拦截弹和来袭导弹初始运动状态如表1所示。 表1 拦截弹和来袭导弹初始状态Table 1 Initial state of interceptor and target missile 基于第2节建立的包含中末交班误差的拦截弹末制导误差传播模型,解析计算及蒙特卡罗打靶计算结果如下。 由图5(a)可知,拦截弹在末制导开始时刻,由于初始拦截几何不理想,且视线转率较大,直至5.88 s,拦截弹处于6g的饱和过载状态。由图5(b)可知弹目视线转率控制效果较好,变化连续,且在最终稳定收敛至0.8×10-5rad/s,根据式可算得脱靶量均值为0.046 m。 由图5(c)可知拦截弹末制导过程中误差传播有4个阶段:第1阶段(0~5.88 s),拦截弹加速度饱和阶段,此时导引头的测量信息未能被完全使用,误差为自然发散;第2阶段(5.89~14.22 s),视线转率标准差平稳下降阶段,这是因为制导指令中包含了视线转率估计误差,由于视线转率估计精度较高,因此中段交班误差得到控制;第3阶段(14.23~18.86 s)为视线转率标准差小幅上升阶段,此时视线转率已控制到较小得水平,相同水平的视线转率估计误差在制导指令中占比上升,从而造成视线转率标准差的上升;第四阶段(18.87s~盲区),此时视线转率均值控制接近于零,标准差成类似指数的形式上升,计算可得脱靶量标准差为0.008 m。 由图5及表2可知,本文推导的拦截弹末制导误差传播解析模型同蒙特卡罗打靶结果比对一致性好,计算误差小于3.3%,但是蒙特卡罗计算300次的耗时远大于解析模型的计算时间,因此本文基于协方差描述法推导的拦截弹末制导阶段误差传播变化解析解是精确、高效的。 图5 拦截弹末制导误差传播变化计算结果对比Fig.5 Interceptor terminal guidance error propagation results comparison 表2 解析模型同蒙特卡罗打靶结果统计表 本小节进行相对位置、相对速度误差传播对脱靶量计算分析,弹目相对运动状态及参数设置同第3.1节,取相对位置误差变化范围为0~3 000 m;速度误差为0~140 m/s,计算结果如下。 根据图6及图7计算结果可知,拦截脱靶量随着相对位置、速度误差增加而增加,在本算例边界条件下即相对位置误差为3 000 m、速度误差为140 m/s情况下,脱靶量达734.3 m,无法实现拦截。 图6 相对状态误差对脱靶量影响二维图Fig.6 Two-dimensional diagram of miss distance variety with relative state measurement error 图7 相对状态误差对脱靶量影响三维图Fig.7 Three-dimensional diagram of miss distance variety with relative state measurement error 图8给出了通过脱靶量计算得到了的拦截弹不同脱靶量门限下可允许的相对位置、相对速度误差区域,其中rmiss=1 m的曲线所包围的区域代表可拦截范围。根据计算结果可知当相对速度误差为零时,可允许最大位置误差为2 557 m/s;可知当相对位置误差为零时,可允许的最大速度误差为135.1 m/s。 图8 拦截弹实现拦截可允许的相对状态测量误差集Fig.8 Interceptor permissible relative state measurement error reachable set 本文采用连续离散混合系统协方差描述函数法对大气层外拦截弹末制导过程中误差的传播过程进行了分析及建模,并同蒙特卡罗打靶计算结果进行了比对,验证了所建模型的正确性及高效性,得到了拦截成功所允许的最大弹目相对位置、相对速度误差。通过仿真分析得到了以下结论,一是在相对状态测量误差较小的情况下,拦截弹可以实现对来袭导弹的拦截,相对状态误差主要影响拦截脱靶量散布,即脱靶量方差;二是当相对状态测量误差较大时,直接影响拦截脱靶量的均值,会造成拦截失败。因此需从拦截弹自身性能、导弹防御系统预警卫星及雷达发现跟踪能力等方面,加强对来袭目标红外、雷达、运动特性的信息积累,以期为拦截弹尽量提供精确的中末交班信息,进而提高拦截的成功率。
2.4 拦截弹末制导段误差传播对拦截效果影响分析流程
3 仿真验证与分析
3.1 拦截弹末制导误差传播解析模型验证
3.2 弹目相对状态测量误差对脱靶量影响分析
4 结 论
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
特区文学·诗(2021年6期)2021-12-22
舰船电子工程(2021年4期)2021-05-25
应用数学(2020年2期)2020-06-24
金色少年(奇趣科普)(2017年11期)2017-11-28
兵器装备工程学报(2017年4期)2017-04-28
当代贵州(2015年19期)2015-06-13
制导与引信(2015年3期)2015-04-20
电测与仪表(2015年18期)2015-04-12
弹道学报(2014年1期)2014-12-26