智能花卉叶面喷药施肥机设计
2021-11-09 11:41:04郭怡
重庆科技学院学报(自然科学版) 2021年5期
郭 怡
(重庆水利电力职业技术学院, 重庆 402160)
中国已成为世界上最大的花卉种植基地,2019年花卉出口额近25亿元人民币,销售额在2017年接近1 500亿元人民币,规模逐年增加的花卉种植业对花卉叶面喷药施肥机的需求也越来越大。
荷兰、日本、以色列是世界上花卉种植出口三大强国,其花卉叶面喷药施肥机根据种植场地实际情况主要采用固定轨道式、人工驱动式花卉叶面喷药施肥一体机,达到了高度自动化[1],正向智能化、高效性、个性化、综合性、一体化等方向发展。我国现阶段花卉种植的特点是由数量增长型向质量效益型转变;由“小而全”的生产方式逐步向规模化、专业化转变;由传统落后的种植模式逐步向现代化的种植模式转变。其中,现代化的种植模式下规模化、专业化的种植方式尤为突出,这对花卉种植所需的生产设备有更高的要求。我国目前使用的花卉叶面喷药施肥机以进口荷兰的为主,进口日本的喷药施肥机为辅,国内自主研发的相对较差[2]。
研究设计了一种拥有自主知识产权的智能花卉叶面喷药施肥机,拟解决我国现代化、规模化花卉种植模式下花卉叶面喷药施肥机专业化程度低的问题。
1 智能化喷药施肥机结构设计
1.1 喷药施肥机总体结构
设计的喷药施肥机主要由机架、折叠臂、伺服电机、升降机构、减速器、药箱、喷嘴、转向轮和驱动轮等构成,如图1所示。
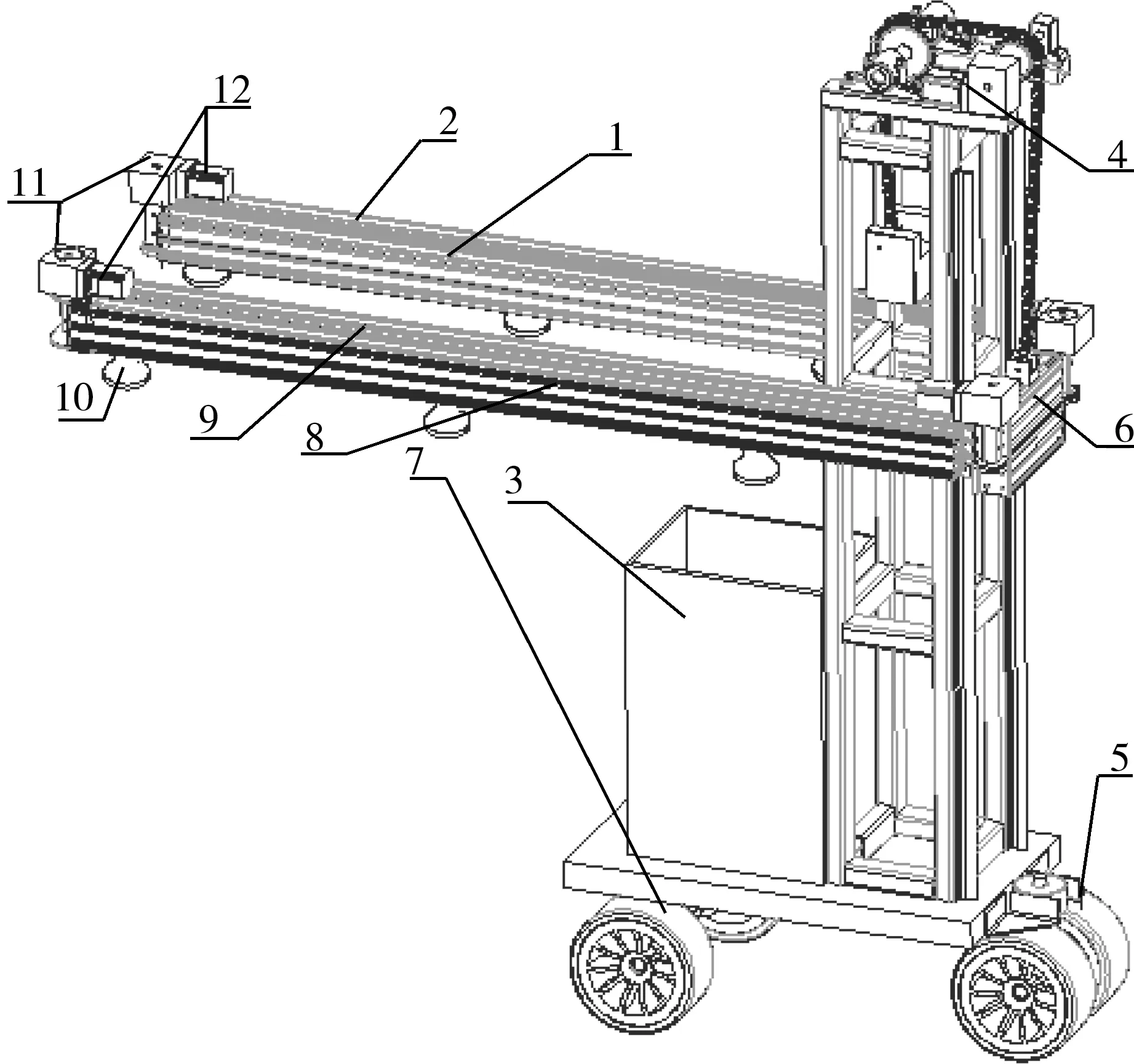
1 — 折叠臂1; 2 — 折叠臂2; 3 — 药箱; 4 — 伺服电机;5 — 转向轮; 6 — 升降机构; 7 — 驱动轮; 8 — 折叠臂4; 9 — 折叠臂3; 10 — 喷嘴; 11 — 减速装置; 12 — 伺服电机
1.2 机架结构
为保证施肥机工作时结构可靠,机架采用框式结构。4套折叠臂采用铝合金型材,由4台伺服电机独立控制,在折叠处采用铰链结构,每个折叠臂上安装由4个电磁阀独立控制的4个喷嘴,可根据所需喷药施肥面积,打开全部(或部分)折叠臂进行喷药施肥作业。升降机构由蜗轮蜗杆减速器、链轮链条传动装置和电机构成,可根据喷洒要求调节升降机构高度。减速器由蜗轮蜗杆组成,减速比大、可靠性强。为减少工作震动,转向轮和驱动轮材质为橡胶[3]。
1.3 关键工作部件设计
1.3.1 折叠臂设计
折叠臂采用铝合金型材,每套折叠臂由1台伺服电机及蜗轮蜗杆减速器等组成。每套折叠臂上安装4个电磁阀独立控制4个喷嘴,2套折叠臂在折叠处采用铰链结构联结[4],伺服电机及减速器安装在1套折叠臂上,蜗轮蜗杆减速器的输出端与另一套折叠臂联结。根据所需喷药施肥面积,打开全部(部分)折叠臂进行喷药施肥作业,大大提高了作业效率。
1.3.2 折叠臂升降机构设计
折叠臂升降机构是针对苗床高低错落、空间位置分布不规律、现有喷药施肥机不能实现充分喷洒而设计的。可根据苗床摆放位置及所需喷药区域来调节其高度。折叠臂结构如图2所示。折叠臂升降机构如图3所示。
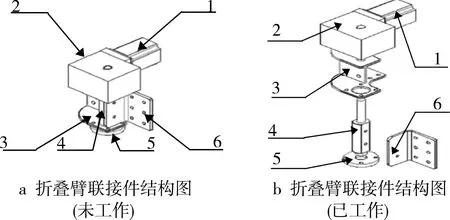
1 — 伺服电机; 2 — 蜗轮蜗杆减速器; 3 — 外臂连接板;4 — 驱动轴; 5 — 端盖; 6 — 内臂连接板
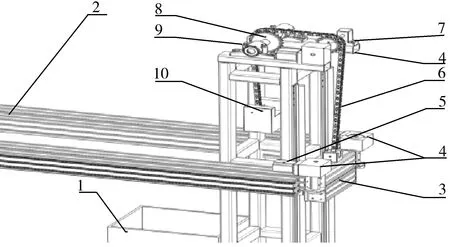
1 — 水箱; 2 — 导轨; 3 — 支架; 4 — 蜗轮蜗杆减速器;5 — 伺服电机; 6 — 链条; 7 — 小链轮; 8 — 大链轮;9 — 轴瓦; 10 — 配重
电机输出端与蜗轮蜗杆减速器输入端联结[5],蜗轮蜗杆减速器输出端安装的链轮与链条啮合(链条一端与折叠臂横梁铰接,另一端与配重连接,配重在机架内有导向轨道),驱动链条上下运动,从而带动折叠臂上下移动。
折叠臂升降的控制通过触摸屏手动操作,PLC输出开关信息控制接触器,电机通过蜗轮蜗杆减速器驱动链条带动折叠臂上下运动,到达合适位置后电机停止运行。利用蜗轮蜗杆减速器的自锁功能锁定位置[6]。
1.3.3 超声雾化喷嘴设计

1 — 主体; 2 — O型圈1; 3 — 锁紧螺母; 4 — 喷芯; 5 — 丝杆;6 — 喷嘴; 7 — O型圈2; 8 — 撞击头
超声雾化喷嘴选用黄铜材料[7],内壁加工出螺旋线,便于药液的喷出。每套折叠臂上安装由4个电磁阀独立控制的4个喷嘴,喷嘴与折叠臂采用球面副连接,可在X、Y、Z三个方向转动,当喷嘴输入带有压力的药液时,喷嘴随机转动,达到较好的喷药施肥效果。超声雾化喷嘴喷出的药粒粒径在30~80 μm,喷药时,从喷嘴到苗床之间可以形成一个超细高浓度雾化区。花卉可以360°浸入到药雾中,在花卉的任意一个方向或者任意一个地方都可以形成密集的药膜,药的使用量比常规可减少60%。喷嘴结构如图4所示。
设计的施肥机的关键技术参数:外形尺寸展开时为2 000 mm×7 750 mm×2 050 mm;合拢时为2 000 mm×603 mm×2 050 mm;行走速度平均为5~10 m/min,最大速度为25 m/min;药箱容积为20 L;喷药面积为40~80 m2;续航时间为2 h (蓄电池供电);工作温度为(-10~+45)℃;工作湿度为30%~ 80%;结构重量为(150~200)kg;整机功率为500 W。
2 工作原理
智能喷药施肥机由1台具有自动行走功能的移动小车驱动(由1台转向伺服电机及1台驱动伺服电机完成),其运动速度根据花卉叶面喷药施肥的剂量需要进行设定;智能喷药施肥机设计了由4台伺服电机各自独立控制的折叠臂,在折叠处采用铰链结构,每个折叠臂上安装由4个电磁阀独立控制的4个喷嘴,根据所需喷药施肥面积,打开全部(或部分)折叠臂进行喷药施肥作业;同时,针对苗床高低错落,空间位置分布不规律的情况,智能喷药施肥机设计了折叠臂升降控制机构,能够很好地适应苗床位置及所需喷药的最佳高度[8]。施肥机运动控制示意图见图5。机器行走由后端驱动轮、前端转向轮以及机体两侧的开关① — ⑥来实现( ① — ④为盘簧型限位开关;⑤ ⑥为光电接近开关)。当(工作)按钮被触发后,PLC按设定频率发送脉冲指令到驱动器,驱动器驱动伺服电机带动驱动轮实现行走。当① — ④中任一个限位开关被触发后,传给PLC一个开关信息,PLC根据开关信息来判断离哪一侧苗床过近,给出指令使转向伺服电机反向运动实现转向,当开关信息消失(即已离开苗床),PLC即发出反向脉冲信号让转向伺服电机反转回正转向轮,收到回正信号(回正接近开关)停止回车动作并使能锁定转向轮。⑤ ⑥光电开关都发出开关信号表示机体侧已无苗床,则PLC停止输出驱动脉冲。暂停后,PLC发出反向脉冲驱动伺服电机带动驱动轮回退,回退时根据① — ④限位开关信号同方向转动转向机构(类似车辆驾驶及倒车)。同时,在回退开始时关闭已打开的电磁阀停止喷药。
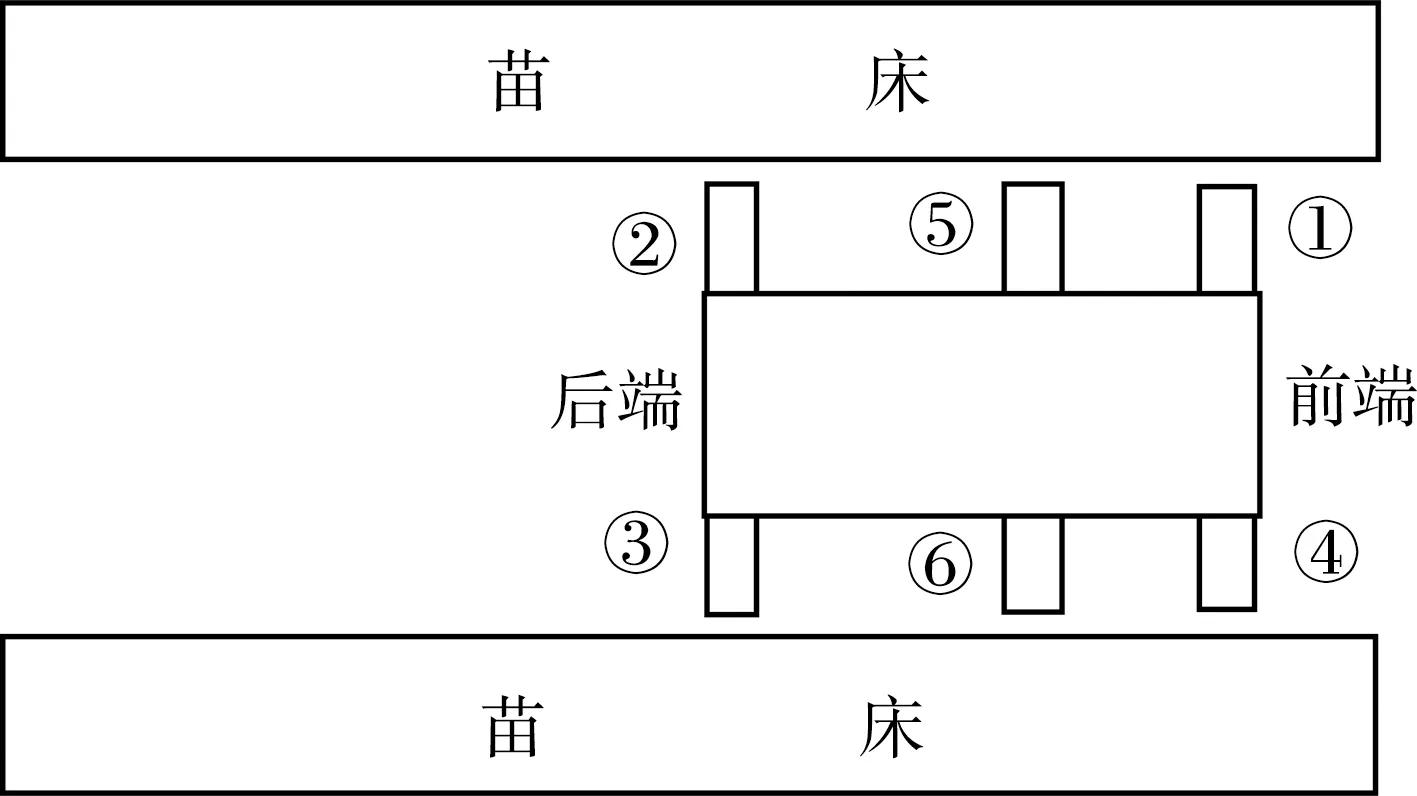
图5 施肥机运动控制示意图
3 结 语
智能花卉叶面喷药施肥机是为解决我国花卉种植栽培企业面临的人工喷药施肥效率低、每次喷药施肥面积少、耗时长以及苗床空间位置分布不规律等问题而专门设计的。该设备具有智能化、高效性、机动性、高适应性等优点,以解决我国现代化花卉种植模式下规模化、专业化花卉种植喷药施肥的需要,对提高种植效率、降低生产成本、提高市场竞争力和占有率有一定的作用。
猜你喜欢
农业工程学报(2022年1期)2022-03-25 01:13:24
机械设计与制造工程(2021年3期)2021-04-16 14:48:46
陕西理工大学学报(自然科学版)(2020年6期)2021-01-15 11:13:32
设备管理与维修(2020年20期)2020-11-17 12:56:54
中国特种设备安全(2019年8期)2019-10-14 00:32:34
经济技术协作信息(2018年20期)2019-01-19 02:56:42
江苏农机化(2015年6期)2015-12-07 11:58:18
农村百事通(2015年10期)2015-07-27 10:09:06
邵阳学院学报(自然科学版)(2015年2期)2015-06-05 12:22:39
机械工程师(2015年10期)2015-02-02 01:13:42