监测站数据综合监测处理与评估技术
2021-11-09 11:50张轲,姚旭,刘扬
舰船电子对抗 2021年5期
张 轲,姚 旭,刘 扬
(1.中国电子科技集团公司第二十研究所,陕西 西安 710068;2.西安财经大学,陕西 西安 710100)
0 引 言
监测站用于采集伪距和载波相位等原始观测数据,并向数据处理中心提供这些数据用于高精度轨道、钟差、电离层改正等处理,为系统基本导航业务和星基增强业务提供数据支持。然而,监测站在实际接收卫星信号的过程中,由于电磁干扰、多径等因素,观测数据可能会出现异常,可能会对数据处理中心进行卫星精密定轨、系统完好性监测和增强处理等产生严重的影响。
为了保证数据处理中心使用数据的准确性,降低数据处理中心数据运算的风险和压力,监测站在将观测数据传送至数据处理中心之前,必须对原始观测数据进行数据质量综合分析处理,保证发送到数据处理中心的观测数据的质量。本文提出了一种监测站综合监测处理与评估技术,实现对原始观测数据进行合理性检验和一致性检测、信号质量监测、数据质量监测、测量值质量监测等,从而确保了监测站发送到数据处理中心的观测数据的质量,为数据处理中心提供了可靠的基础数据。
1 观测数据质量综合监测处理技术
利用观测数据质量综合监测处理技术对每台接收机的数据首先进行观测数据合理性检验,然后分别进行信号质量监测、数据质量综合监测和测量值合理性监测。信号质量监测包括载噪比检测和码-载波偏离度检测;数据质量综合监测进行卫星星历验证;测量值质量监测主要包括载波相位平滑码伪距变化量检测。接着对多路接收机的数据综合进行观测数据一致性检测,最后将观测数据质量综合监测结果进行存储和实时显示,存在数据质量有异常情况时,进行告警和上报。处理流程如图1所示。
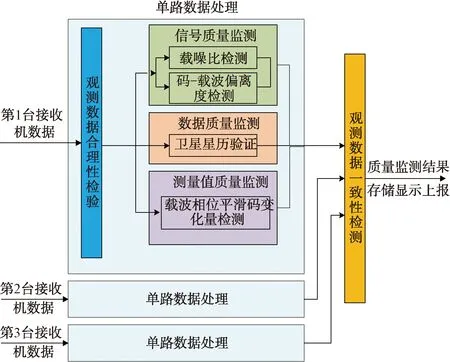
图1 监测处理评估技术流程图
2 观测数据合理性检验
观测数据是卫星接收机对外输送的主要数据信息,观测数据合理性检验就是对接收机状态、伪距、载波相位、载噪比、多普勒频移等数据进行检测,以判别测量值的明显误差。监测方法主要包括检测接收机反馈工作状态,分析观测数据数值合理性,以及对观测数据时序进行拟合处理。
2.1 接收机状态分析
监测接收机实时反馈自身工作情况,通过检测接收机工作状态信息可以判断当前接收机各个通道接收卫星信息是否正常,以及整个接收机工作是否正常。
2.2 数值范围的合理性检验
监测接收机输出的伪距、载波相位、载噪比、多普勒频移等数据正常的情况下,应在一定的范围内,检测这些数据,如果超出对应范围(门限值),可以认为这些数据不合理,对这些数据进行标识。
门限值的确定如下:收取长时间的数据,然后对这些数据进行统计处理,计算相应数据的均值和方差,通过对均值和方差的分析确定合适的门限值。
2.3 时间序列上的拟合预测分析
伪距是观测数据中反映卫星与站点距离变化的重要参数,在一定时间内伪距的变化应该是连续的、有平滑特性的。当异常情况发生时,在某段时间内的伪距就会发生跳变,打破原有的连续特性,据此可以判断伪距的合理性。
在一定时间内,伪距值y与时间x之间满足y=ax+b的线性关系,利用连续10个历元的伪距数据,使用最小二乘法来计算伪距的变化率a和截距b,计算公式如下所示:
(1)
(2)
在短时间内,卫星相对于监测站的位置稳定,此时卫星运动速度、接收机和卫星钟速也相对稳定,假设均为a。已知前一时刻伪距值,通过刚假设的短时内伪距变化率a,可估算当前时刻伪距值:
(3)

(4)
dP的绝对值与检测门限值作比较,若小于门限值,则检测通过,认为该秒的伪距观测值合理;若大于门限值,则检测不通过,认为该秒的伪距观测值有问题。
3 信号质量监测
经过观测数据合理性检验的数据,可以视为接收机输出的合理数据,但合理数据并不一定是可靠的、有效的数据,如何判断评估数据的有效性和可靠性,就需要进一步分析处理。首先,需要对检验完毕的数据信息在信号层面的质量进行监测评估。信号质量监测主要用于检测卫星信号在传输过程中没有发生跳变,并保证信号传输功率满足系统要求,这里可以通过对载噪比检测和码-载波偏离度检测来实现。
3.1 载噪比检测
使用载噪比检测卫星信号需要对监测接收机当前所有可视卫星的每个频点的载噪比(C/N0)分别进行计算分析[1]。方法如下:
计算接收机m接收到的卫星n在当前时刻与上一时刻载噪比的平均值:
C/N0_avg,m,n(k)=
(5)
将平均后得到的载噪比值同设置的检测门限值进行比较,若大于门限值,则检测通过;若小于门限值,接收机很难从噪声中将信号分离出来,则检测不通过。
由于监测接收机可视卫星的俯仰角变化直接影响该卫星的载噪比,仰角和载噪比呈现正相关特性,因而检测门限是按照卫星仰角10°一个台阶进行设置的。
门限值的确定如下:收取长时间的数据,然后对这些数据进行统计处理,计算相应数据的均值和方差,通过对均值和方差的分析,确定合适的门限值。
3.2 码-载波偏离度检测
码-载波偏离度检测用于探测电离层风暴并确保对于任何给定的卫星码和载波的偏离度足够小[2]。通常使用GMA(Geometric Moving Averaging)方法来估算码-载波偏离度D(k)。
计算接收机m接收到的卫星n的Dm,n(k):
Dm,n(k)=
(6)
式中:τs为时间常数,通常取为100 s;Ts为数据更新率;z为原始的码减载波值,dz是当前时刻与上一时刻z的差值。
对于接收机m接收到的卫星n,计算zm,n(k):
zm,n(k)=ρm,n(k)-φm,n(k)=
2Im,n(k)+Mm,n(k)-Nm,n(k)λ
(7)
式中:ρ为码伪距;φ为载波相位;I为电离层延迟;M为多径误差;N为整周模糊度;λ为波长。
计算当前时刻与上一时刻z的差值dzm,n(k):
dzm,n(k)=zm,n(k)-zm,n(k-1)=
2(Im,n(k)-Im,n(k-1))+
(Mm,n(k)-Mm,n(k-1))-
(Nm,n(k)-Nm,n(k-1))λ=
2(Im,n(k)-Im,n(k-1))+
(Mm,n(k)-Mm,n(k-1))
(8)
若当前没有载波周跳,则上式中的整周模糊度Nm,n会被消去,若有载波周跳,则GMA滤波器需要重置。
4 数据质量监测
经过信号层面质量监测评估后,数据的实际有效性也需要进一步进行质量分析处理,以便剔除无效数据。
由于接收机接收到的可视卫星星历在一段时间内相对稳定,因此数据质量监测可以通过对可视卫星的星历对比监测来分析导航数据是否可靠,具体方法如下:
对每颗卫星的星历数据进行验证。连续跟踪卫星播发的星历数据,采用连续多组星历数据计算同一时刻卫星位置信息,如果结果相对差异较大,超过一定范围,则认为星历检测异常。方法如下:
用新星历计算k时刻卫星位置p1:
(9)
式中:rx1、ry1、rz1为用新星历计算的卫星三维位置坐标。
用旧星历计算k时刻卫星位置p2:
(10)
式中:rx2、ry2、rz2为用旧星历计算的卫星三维位置坐标。
对于卫星s,第k时刻,计算新旧星历计算的卫星位置差的绝对值:
Δps=|p1s(k)-p2s(k)|
(11)
将Δps与相应的检测门限值相比较,若Δps大于检测门限值,则对相应卫星标注未通过检测标识。
门限值的确定:收取长时间的数据,然后对这些数据进行统计处理,计算相应数据的均值和方差,通过对均值和方差的分析确定相应的门限值。
5 测量值质量监测
接收机输出的观测数据包括一部分连续的测量值,因此测量值监测是通过分析某一时段连续伪距、载波相位等观测量的连续性,以检测突然的阶跃和其它的快变误差。测量值质量监测主要包括载波平滑码变化量检测。
载波相位观测量在一段时间内变化量与伪距码变化量表现出一定的相关性,可以利用相邻的2个时刻码伪距和载波相位变化量来计算原始的伪距码观测量的冲击与阶跃误差[3]。这种方法使用载波相位观测量的变化值,平滑分析码伪距观测量。具体处理方法如下:
(1) 对每台接收机的每颗卫星进行HATCH滤波,计算平滑码伪距值Ps,m,n:
φm,n(k)×λ-φm,n(k-1)×λ)
(12)
式中:k为时间点;Ns=τs/Ts,τs为时间常数,取值为100 s,Ts为原始观测量的采样间隔;Pm,n为码伪距观测量;φm,n为载波相位观测量;λ为波长。
(2) 根据平滑码伪距值计算统计量值sInnom,n:
sInnom,n(k)=Pm,n(k)-(Ps,m,n(k-1)+
φm,n(k)×λ-φm,n(k-1)×λ)
(13)
式中:各符号代表的含义与(1)中相同。
(3) 将统计结果sInnom,n的绝对值与预先设置的统计量阈值TsInno进行差值分析,若二者差值小于零,则认为码伪距正常,若二者差值大于零,同时连续出现3次,则产生1个异常标志,认为码伪距异常。
统计量阈值TsInno是通过统计各种卫星类型和不同的卫星仰角分别进行加权处理后预设的。这些对阈值的处理可以提高检测的准确性,进而提高载波平滑码变化量检测的精度。
为了进一步提升观测数据质量监测性能,将载噪比检测、码-载波偏离度检测、卫星星历验证、载波平滑码变化量检测的结果进行综合处理和逻辑判决,最大程度地对各种异常情况进行全面的检测,有效降低观测数据异常的漏检和误检概率。
6 观测数据一致性检测
监测站观测数据通常会有多台接收机作为数据来源,这样一来可以通过对多路数据来源进行平行验证,通过计算多路伪距和载波相位在同一时段的一致性检测处理,分析出该时段的可用卫星和数据正常的接收机。伪距与载波相位一致性分析方法大体相同,下面以伪距为例介绍检测方法。
对每个伪距测量值求它的距离修正值,公式如下:
PRC=ρ-D+c·(B-ΔB·Δt)-c·(I+T)
(14)
式中:ρ为伪距测量值,此处使用的是多径消除后的伪距;D为卫星和用户之间的真实距离;B为卫星所发射的钟偏差;ΔB为卫星钟漂;T为对流层延迟;I为电离层延迟;c为光速。
计算距离修正值与接收机m中所有卫星距离修正值平均值的差异:
(15)
式中:m为接收机号;n为卫星号;Sc为接收机跟踪的所有卫星集合;Nc为集合Sc的成员个数。
计算所有接收机中卫星n的距离修正值的平均值:
(16)
式中:Sn为对卫星n有效测量的接收机的集合;M(n)为集合Sn的成员个数。
卫星n的B值是通过计算当前卫星所有接收机距离平均值和排除当前接收机之外的距离平均值做差得到的改正参数:
(17)
当Sn变化或接收机对卫星失锁时,B值需要重置。
以北斗二号6号卫星为例,使用北斗时间200周,190 000 s之后约1 h的数据进行观测数据一致性检测,B值-时间分布图如图2所示。

图2 北斗二号6号星B值-时间分布图
从图2可以看出,3号接收机误差超过了门限值,相对其他两台而言精度损失较大。对相同时间段的北斗二号其它卫星进行距离修正参数B值的统计,现象类似,1号接收机和2号接收机B值小于预设阈值,3号接收机B值超过预设阈值,综合判断3号接收机一致性检测不通过。
7 结束语
本文通过综合分析监测站数据质量的信号有效性、数据可用性、测量值合理性等多种途径实现了监测站数据质量综合监测处理技术的攻关,经过多年实际应用验证,能够有效对传输给数据处理中心的观测数据进行质量综合监测评估。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
中国电气工程学报(2019年18期)2019-10-21
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
投资北京(2017年1期)2017-02-13
民生周刊(2016年7期)2016-04-15
电脑爱好者(2015年14期)2015-09-10
润滑油(2009年2期)2009-04-30