基于光纤光栅的高精度压杆式位移传感器
2021-11-08 08:51孙欣欣王兴业宋岩升
沈阳建筑大学学报(自然科学版) 2021年5期
孙 丽,孙欣欣,李 闯,王兴业,宋岩升
(沈阳建筑大学土木工程学院,辽宁 沈阳 110168)
结构健康监测是保证结构处于安全运行状态的一种有效手段。如果对结构进行持续的检查、监测、报警和分析并采取积极防控措施,大多数结构灾难是可以避免的[1]。位移是结构健康监测中的基本物理量,是振动、压力、应变、加速度、流量等多种物理量测量的基础[2]。监测位移所用的位移传感器主要有电容式、电感式、霍尔式等。光纤光栅具有抗电磁干扰、电绝缘性能好、安全可靠、耐腐蚀、体积小、重量轻、传输损耗小、传输容量大、测量范围广等优点[3-7]。一些学者进行了相关的研究,徐雨露等[8]提出一种基片式环形光纤光栅位移传感器,利用谐振腔中不同模式拍频信号的变化实现传感,提高了监测微小位移的灵敏度和精度。何俊等[9]基于等强度梁理论研制一种适用于工程应用的新型光纤光栅位移传感器。田晓丹等[10]基于等腰三角形悬臂梁和双光纤光栅结构设计并制造了一种高分辨率、温度自补偿的光纤位移传感器。郭振等[11]研究了一种基于光纤光栅的高灵敏度位移传感器,采用非胶封装工艺和双光栅工作方式,解决了光栅的封装稳定性和温度与应力交叉敏感问题。孙丽等[12]提出一种楔形腔结构的光纤光栅位移传感器,将其应用于钢筋混凝土柱双向偏心受压试验中,测得结果与电类位移计的测量结果对比表明,传感器测量结果准确,实用性强,适用于工程结构的位移监测。笔者基于光纤光栅原理,设计了高精度压杆式、大量程、具有温度自补偿并且可以进行实时监测特点的位移传感器,提出光纤光栅位移传感器的工作原理及设计制作,对该传感器进行标定试验及静态特性分析,为结构健康监测中的位移监测提供了一种有效的监测手段。
1 传感器结构设计及理论分析
1.1 高精度压杆式位移传感器结构设计
高精度压杆式光纤光栅位移传感器由光纤光栅、拉伸弹簧、滑动杆、光滑轨道、定位片、限位结构、毛细钢管、光纤松套管、压杆、保护外壳组成(见图1)。
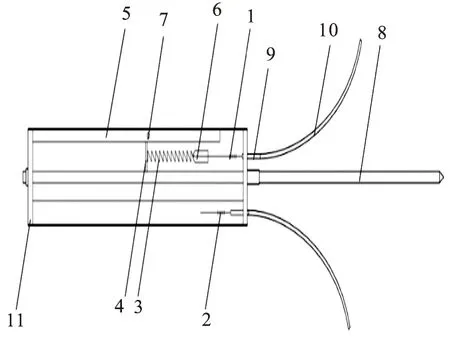
1.测量用光纤光栅;2.温度补偿光纤光栅;3.拉伸弹簧;4.滑动杆;5.光滑轨道;6.定位片;7.限位结构;8.压杆;9.毛细钢管;10.光纤松套;11.保护外壳。
高精度压杆式光纤光栅位移传感器的设计量程为100 mm。主体结构采用串联结构,将拉伸弹簧、定位片中心和光纤光栅置于同一直线上。弹簧的初始状态为受拉状态,使光纤光栅受预拉力作用,当压杆产生位移时,使弹簧发生变形,持续受拉,通过定位片拉动光纤光栅,光纤光栅全程受拉,避免受压折断。这样可以充分利用光纤光栅自身的形变能力,避免粘贴过程中给光纤光栅造成初始变形,可显著提高传感器的监测精度。采用拉伸弹簧将相对位移转化成弹力,施加在裸光纤光栅上,进而使光纤光栅发生轴向变形,获取到中心波长变化信号,进而实现对结构位移的监测。弹簧的刚度直接影响着光栅中心波长的变化量,因此通过选取不同刚度的弹簧,可以灵活地改变测量精度。位移传感器内部除了测位移的光纤光栅外还有一根裸光纤光栅放置其中进行温度补偿,避免由于外界环境温度变化导致的测量误差,有利于实现结构的长期监测。本光纤光栅位移传感器结构简单、测量精度高、稳定性好、易于加工制造,具有较好的适用性和拓展性。
1.2 高精度压杆式位移传感器工作原理
为了说明高精度压杆式光纤光栅位移传感器的工作原理,在理论分析时采取以下假设:
①弹簧的弹性系数比光纤光栅小,忽略光纤光栅自身轴向变形。
②弹簧的弹性系数比定位片小,忽略定位片自身形变。
③定位片与其粘接的光纤光栅尾纤协同变形。
位移传感器的初始状态为限位结构固定在光滑轨道中央,压杆位于限位结构右端。弹簧的初始状态为拉伸状态,x为拉伸长度,F0为弹簧初始状态的拉力。当压杆发生相对位移Δx时,弹簧拉伸产生弹力F,由于力的相互作用,裸光纤光栅所受轴向力的值同样为F,光纤光栅产生应变ε,由材料力学基本原理可知其关系满足方程:
F0=k·x.
(1)
F=k·(x+Δx).
(2)
(3)
A=πr2.
(4)
(5)
式中:k为弹簧刚度;σ和ε分别为裸光纤光栅的轴向应力和应变;r为光纤光栅的半径;E为光纤光栅的弹性模量。
由式(1)~(5)可得:
(6)
由光纤光栅的工作原理可知,若不考虑温度导致的波长变化,光纤光栅位移传感器的工作原理表达为
(7)
式中:Kε=1-Pe,Pe为FBG的有效弹光系数;λB为FBG的初始中心波长值;ΔλB为FBG的中心波长变化量。
由式(6)和(7)可得:
(8)
式(8)为高精度压杆式光纤光栅位移传感器的理论公式。可以看出,位移变化量Δx与光栅中心波长变化量ΔλB之间呈线性关系,故可由监测中心波长变化量ΔλB获得位移变化量Δx。当拉伸弹簧的刚度k发生改变时,位移传感器的中心波长变化量与相对位移变化量之间的比值发生变化,此高精度压杆式光纤光栅位移传感器的测量精度可以调节。
1.3 高精度压杆式位移传感器制作
高精度压杆式光纤光栅位移传感器的核心构件为压杆与拉伸弹簧,压杆的长度及侧壁的滑动杆和光滑轨道上的限位结构的定位决定位移传感器的量程,拉伸弹簧决定传感器的灵敏系数和线性度,因此二者的选取对位移传感器的设计产生主要影响。
为了保证光纤光栅位移传感器可以长期稳定地对结构进行监测,在传感器处于满量程时需要确保光纤光栅中心波长在应变变化时可以在被监测范围内,同时拉伸弹簧处于弹性工作状态下,并且其他构件在长期使用过程中均可以保持良好的稳定性。
对于笔者设计的高精度压杆式位移传感器的构件需要有以下要求:
①具有良好的稳定性,抗腐蚀性,抗疲劳强度。
②具有良好的机械加工性能。
③具有较低的线弹性系数。
④拉伸弹簧具有较低的滞弹性及较高的弹性极限。
⑤轨道光滑,具有较小的摩擦力。
综合考虑以上因素,高精度压杆式光纤光栅位移传感器保护外壳为304不锈钢与PVC混合材质,使传感器内部环境封闭且稳定,安装简单,使用方便,设备成本低,稳定性好,具有良好的抗腐蚀能力,不易受到外部干扰,对光纤光栅可以起到良好的保护作用。高精度压杆式光纤光栅位移传感器选用Q235钢作为压杆、滑动杆和限位结构的材料,该材料的屈服强度σs=235 MPa,弹性模量Ec=210 GPa。与光纤光栅相比,其弹性模量较大。压杆长度lc=400 mm,直径dc=5 mm;滑动杆lh=10 mm,直径dh=2 mm;限位结构为M2十字帽螺丝穿透光滑轨道,选用的材料具有较大的抗弯刚度,适用于该传感器的制作。
在弹性限度内,拉伸弹簧的弹力可由式(1)中的弹性系数k决定,k取值与弹簧材料、弹簧圈直径、弹簧丝粗细、单位弹簧的圈数有关。弹簧劲度系数计算公式如下:
(9)
Dm=D0-d.
(10)
Nc=N-2.
(11)
式中:G为线材的刚性模数,MPa,钢丝弹簧为79 000 MPa,不锈钢丝弹簧为71 000 MPa;d、D0和Dm分别为弹簧线径、外径和中径,mm;N和Nc分别为弹簧总圈数和有效圈数。
由式(9)~ 式(11)可得:
(12)
高精度压杆式光纤光栅位移传感器满量程状态时,FBG的设计应变为500 × 10-6,光纤的弹性模量约为15 GPa,直径近似为0.9 mm[13]。其中光纤纤芯直径125 μm,涂覆层外直径250 μm,纤维保护套外直径0.9 mm。拉伸弹簧初始拉伸状态x=10 mm,满量程为100 mm。由式(2)和式(6)可以得出,F约为1.44 N,计算可得拉伸弹簧的劲度系数k=0.013 1 N/mm,故选用尺寸为线径0.3 mm、外径4 mm、总长度40 mm、圈数为110的不锈钢拉伸弹簧。将定位片与光纤光栅前端的尾纤粘接,采用502胶作为胶粘剂,光纤光栅后端的尾纤外套设有光纤松套,光纤松套外壁与毛细钢管内壁抵接,使用353ND将光纤光栅、松套管、毛细钢管粘接到一起并联合使用AB胶固定在保护外壳预留孔中。另一侧温度补偿的裸光纤光栅使用502胶固定,尾纤使用相同方法通过预留孔固定在保护外壳。未安装保护外壳的实物如图2所示。
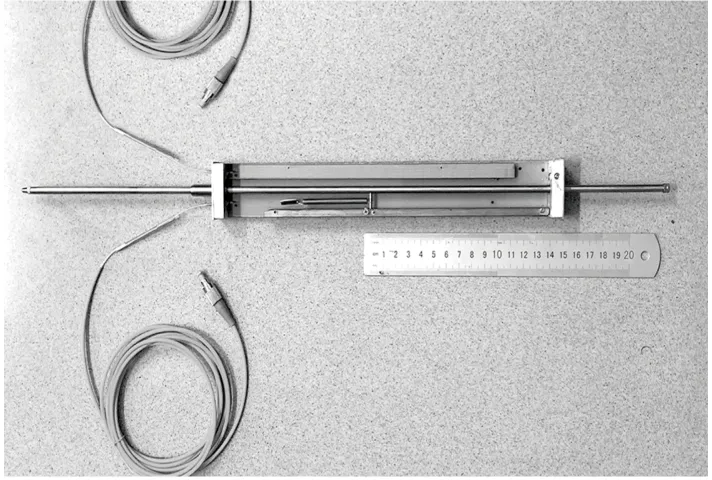
图2 高精度压杆式光纤光栅位移传感器Fig.2 The physical image of high precision and pressure rod type FBG displacement sensor
2 传感器的标定试验
2.1 试验前期准备
标定试验采用的iFBG-eDAQ-S15多类型传感器同步采集仪是基于嵌入式硬件平台和实时操作系统的多通道光纤光栅同步解调仪,采用波长扫描型光纤激光器作为光源,主要技术指标:波长范围1 510~1 590 nm;精度1 pm;稳定性±2 pm光纤光栅反射光功率-5 dBm(Max);动态范围50 dB;弱信号增益20 dB;扫描频率1~5 Hz;光路数量15,单通道可同时连接多个FBG传感器(取决于传感器波长范围)。游标卡尺量程0~150 mm,精度0.02 mm。
将计算机开启并与多类型采集仪进行连接,开启运行解调软件,将跳线尾纤接入多类型同步采集仪通道口(见图3)。准备开始标定试验测试。

图3 高精度压杆式光纤光栅位移传感器标定试验Fig.3 Calibration experiment of high precision and pressure rod type FBG displacement sensor
标定试验步骤如下:
①将光纤光栅位移传感器放置在试验台上,一端为固定端,另一端为自由端。
②用游标卡尺的示数表示光纤光栅位移传感器位移变化的长度,初始状态位移为0。
③按步长为1 cm逐渐改变位移传感器的位移变化,使得位移计探头在0 ~ 10 cm变化,每次变化后静置30 s,采用光纤光栅同步采集仪记录波长。
④待位移达到10 cm时,进行逆行程试验,位移由10 cm ~ 0进行变化。仍然步长为1 cm采用光纤光栅同步采集仪记录波长。
⑤将试验步骤①~④重复进行两次,由采集的3次试验数据用来得到高精度压杆式光纤光栅位移传感器的静态指标。
2.2 试验结果与数据分析
由传感器的性能测试标准,完成了3组标定试验。在3组标定试验中,作为温度补偿的光纤光栅传感器中心波长值均保持在1 550.008 nm左右,偏差值最大为5 pm,因此在本次标定试验中,可以认为温度对位移传感器不产生影响。3组标定试验的正逆行程标定试验数据的处理结果见表1。

表1 3次标定试验的正逆行程中心波长Table 1 Center wavelength value of forward and reverse stroke of three calibration tests
高精度压杆式光纤光栅位移传感器的相对位移量与波长的变化关系曲线如图4~ 图9所示。
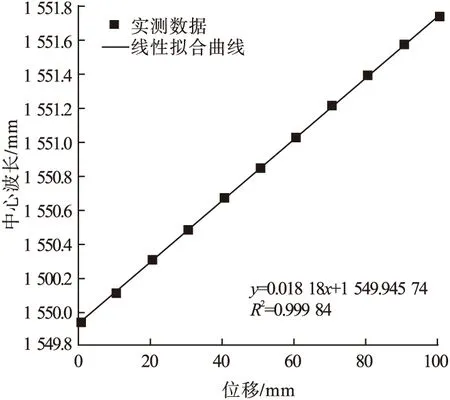
图4 第1次正行程标定试验Fig.4 The first positive stroke calibration test

图5 第2次正行程标定试验Fig.5 The second positive stroke calibration test
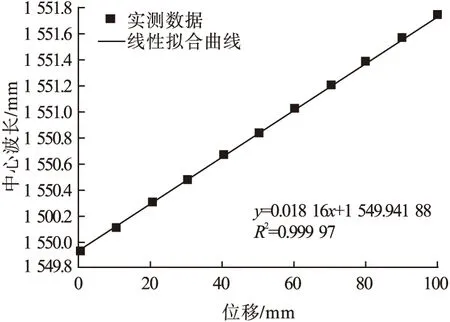
图6 第3次正行程标定试验Fig.6 The third positive stroke calibration test
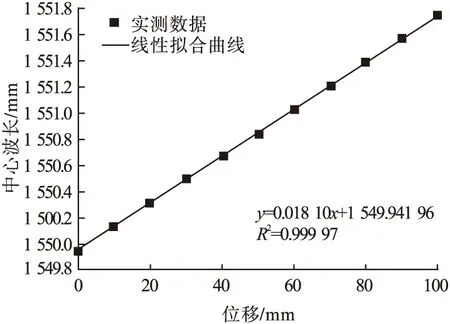
图7 第1次逆行程标定试验Fig.7 The first reverse stroke calibration test
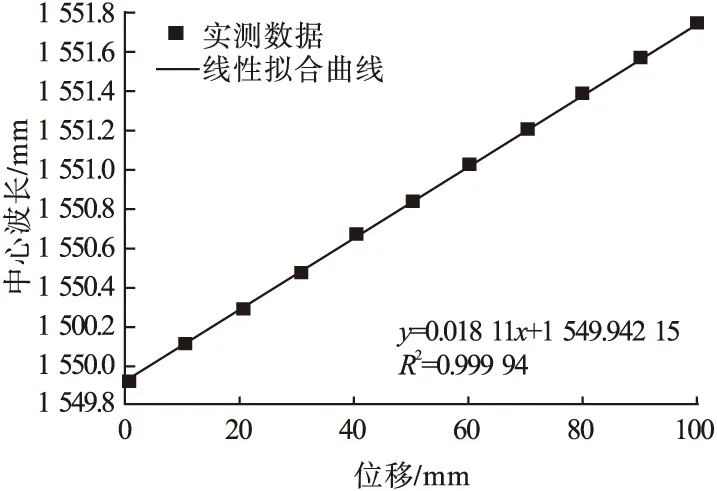
图8 第2次逆行程标定试验Fig.8 The second reverse stroke calibration test
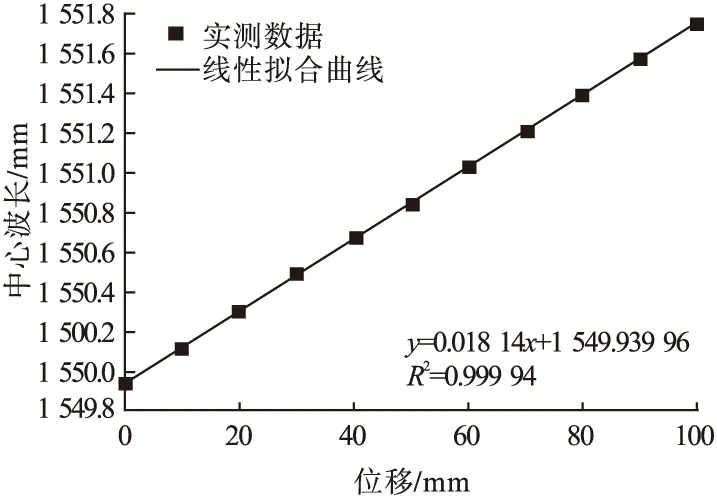
图9 第3次逆行程标定试验Fig.9 The third reverse stroke calibration test
3 传感器静态特性分析
3.1 灵敏度
由数据拟合可知,3组正行程试验数据对应的拟合方程相应的校正决定系数R2均大于0.99,求得的灵敏度系数分别为18.18 pm/mm、18.16 pm/mm和18.16 pm/mm。3组逆行程试验数据对应的拟合方程相应的校正决定系数R2均大于0.99,求得的灵敏度系数分别为18.10 pm/mm、18.11 pm/mm和18.14 pm/mm。取均值,计算得出高精度压杆式位移传感器的位移灵敏度系数为18.14 pm/mm。
3.2 线性度
传感器中心波长的算术平均值与拟合直线上的参考值间的最大差值与满量程状态下FBG的中心波长改变量的比值即为传感器的线性度,所以线性度eL又被称作“非线性误差”,该值越小,线性程度越好,计算式为
(13)
式中:Δλmax为3次正、逆行程试验中FBG中心波长的算术平均值与拟合直线上的参考值间的最大差值;yFS为在满量程状态下FBG的中心波长改变量。
通过3次正、逆行程的试验数据,得出3次标定试验中正、逆行程中的中心波长算数平均值。通过位移和波长的算术平均值经最小二乘法拟合得出拟合直线y=0.181 40x+1 549.942 51,将位移变化量依次带入表达式中,得出传感器波长的拟合值,进一步得出偏差值的绝对值,结果见表2。由表2可知,波长拟合值与波长算术平均值最大偏差的绝对值Δλmax为0.005 1 nm,位移传感器的满量程输出yFS为1 551.751 5-1 549.940 2=1.811 3 nm。根据式(13)可知,高精度压杆式光纤光栅位移计的线性度为0.282 %,说明此传感器的线性度较好。

表2 传感器的线性度Table 2 The linearity of sensor
3.3 迟滞性
迟滞性eH表示传感器在正、逆行程中输入-输出信号特征曲线的偏差值,是评价传感器静态指标中的重要一项,计算式为
(14)
通过3次正、逆行程的试验数据,得出3次标定试验中正、逆行程中的中心波长算数平均值,结果见表3。
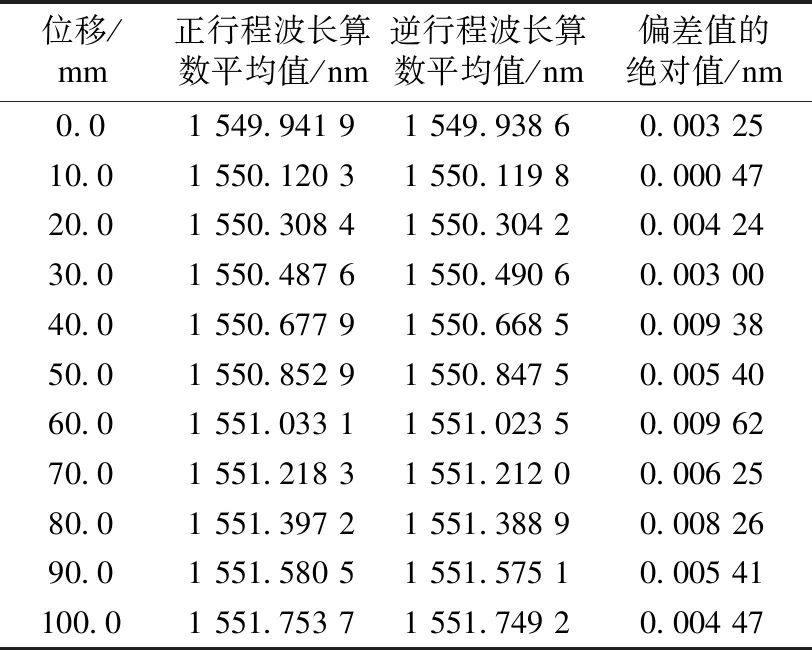
表3 传感器的迟滞性Table 3 The hysteresis of sensor
由表3可知,3次试验过程中正行程与逆行程光纤光栅中心波长偏差值ΔHmax为0.009 62 nm,位移传感器的满量程输出yFS为1.811 3nm,根据式(14)可知,笔者所设计的高精度压杆式位移传感器的迟滞性误差为0.531%,说明此传感器的迟滞性较好。
3.4 重复性
重复性eZ反映了在试验中将传感器在相同方向上输入相同应变量得出的波长漂移曲线不相同的水平,其评价指标为数据的标准偏差。
由贝塞尔公式:
(15)
(16)
根据式(15)得出3个正行程和3个逆行程试验数据的标准偏差,结果见表4。
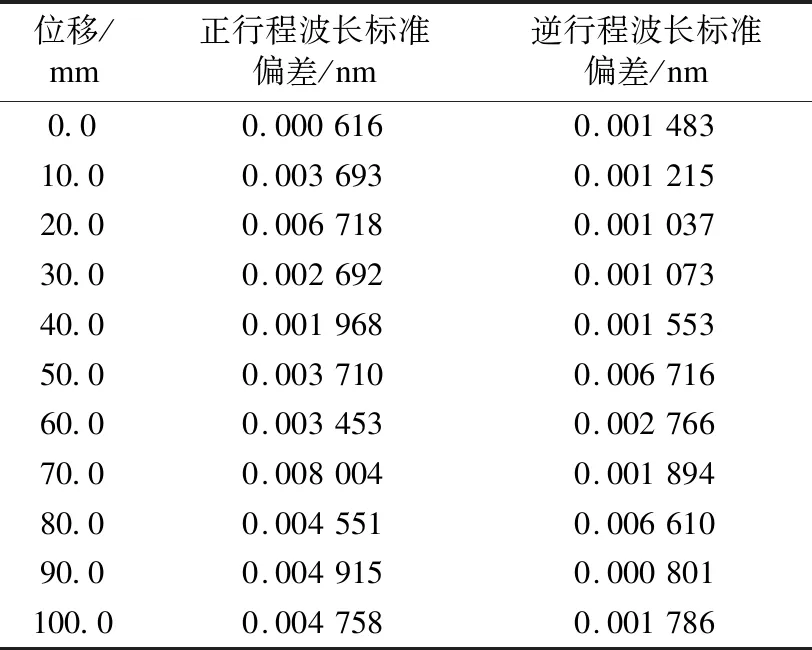
表4 标准偏差数据Table 4 The data of standard deviation
由表4可以得出传感器的3个正行程和3个逆行程试验数据的标准偏差σmax为0.008 004 nm,根据重复性误差计算式(16),当置信概率取99.7 %时,置信系数α=3,得出高精度压杆式位移传感器的重复性误差为1.326 %,说明此传感器的重复性较好。
3.5 静态误差
静态误差eS计算式为
(17)
根据式(17)可以得出高精度压杆式位移传感器的静态误差为1.456 %。
4 结 论
(1)笔者基于光纤光栅原理,提出一种用弹簧作为力的转化元件,将结构产生的位移转化成光纤光栅上的应力,从而引起光纤光栅中心波长变化的高精度压杆式FBG位移传感器。
(2)该传感器的量程为0~100 mm,通过对传感器进行标定试验及静态特性分析可以得出,其线性度误差为0.282 %,迟滞性误差为0.531 %,重复性误差为1.326 %,静态误差为1.456 %,灵敏度系数为18.14 pm/mm,相关系数达到0.999以上,光纤光栅中心波长的差值与位移传感器的位移变化量呈线性关系,其位移特性曲线具有良好的线性度、迟滞性和重复性。
(3)该传感器具有高精度、大量程、温度自补偿和可以进行实时监测等特点,适用于对结构进行长期位移监测。
猜你喜欢
装备制造技术(2019年12期)2019-12-25
专用汽车(2018年10期)2018-11-02
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
高师理科学刊(2016年8期)2016-06-15
测绘科学与工程(2016年6期)2016-04-17
专用汽车(2016年4期)2016-03-01
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
山东冶金(2015年5期)2015-12-10
物理与工程(2014年4期)2014-02-27