120km/h A型地铁车辆径向转向架动力学性能研究
2021-11-08 09:52肖权益池茂儒梁树林
机械 2021年10期
肖权益,池茂儒,梁树林
120km/h A型地铁车辆径向转向架动力学性能研究
肖权益,池茂儒,梁树林
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
为使地铁车辆转向架在保证良好蛇形稳定性的基础上改善其曲线通过性,阐述了径向转向架的导向原理,并基于多体动力学仿真软件建立了传统、自导向以及迫导向三种地铁车辆动力学模型,对比分析了不同转向架的动力学性能。研究结果表明,地铁车辆采用径向转向架能显著改善冲角以及轮轨磨耗,但自导向转向架在极小半径曲线径向效果不佳;为提高车辆直线稳定性,自导向转向架径向机构需要匹配大阻尼减振器,迫导向转向架需要通过悬挂参数匹配以防车辆低锥度失稳。
地铁车辆;自导向转向架;迫导向转向架;动力学性能
车辆动力学性能主要取决于轮轨和悬挂参数的匹配,但直线稳定性和曲线安全性对参数的要求普遍互相矛盾,因而转向架参数通常是折衷选取。在车辆通过曲线时,传统转向架轮对在蠕滑力的作用下会趋于径向,但当曲线较小时,蠕滑力的导向能力不足,导致轮缘贴靠钢轨而引起磨耗加剧。径向转向架可解决以上两个方面的问题,其借助径向辅助机构使轮对趋于径向,可在保证稳定性的情形下改善车辆由于小半径曲线多而轮轨磨耗加大的现象[1-3]。因此,深入研究地铁车辆径向转向架动力学性能具有重要意义。
相关学者针对径向转向架开展了一系列研究并取得了一些成果。李芾等[4]针对200 km/h提速客车提出了一种自导向径向转向架的方案,仿真结果表明采用自导向转向架可有效地改善曲线通过性;刘宏友等[5]分析了米轨迫导向转向架的导向机构参数对车辆动力学性能的影响;Garcia等[6]在保证同一稳定性的条件下对比分析了径向转向架与常规转向架的动力学性能;砥上[7]介绍了日本单轮轴导向转向架的运行概况,其实验结果表明采用导向转向架可降低轮缘磨耗和轮轨横向力;胥朝霞[8]基于运动学理论设计了一种转臂式城轨车辆转向架的径向机构。
本文以某A型地铁车辆为研究对象,基于计算多体动力学建立传统、自导向以及迫导向转向架的仿真模型,重点从稳定性和曲线通过性两个角度对比分析其动力学性能,以期为地铁车辆径向转向架的应用提供参考。
1 径向转向架导向机理
转向架的自导向特性是依靠蠕滑力实现的。如图1所示,转向架进入曲线时,前后轮对均朝曲线外侧横移但不能达到纯滚动理想状态,前轮对相对径向线自然形成负偏角,后轮对形成正偏角,从而前轮对形成负的横向蠕滑力,后轮对形成正的横向蠕滑力,前轮对贴靠外轨产生正纵向蠕滑偏转力矩,后轮对贴靠内轨产生负纵向蠕滑偏转力矩,因此前后轮对在各自纵向蠕滑偏转力矩作用下呈外八字形展开以趋于径向位置。但在曲线半径较小时,蠕滑力的导向能力有限,不足以使所有轮对同时处于径向;同时常规转向架较大的轮对间弯曲刚度也限制了径向趋势,使前轮对在曲线通过时产生较大的横向蠕滑力和较小的纵向蠕滑力,因而导致冲角增大、轮轨间磨耗加剧。
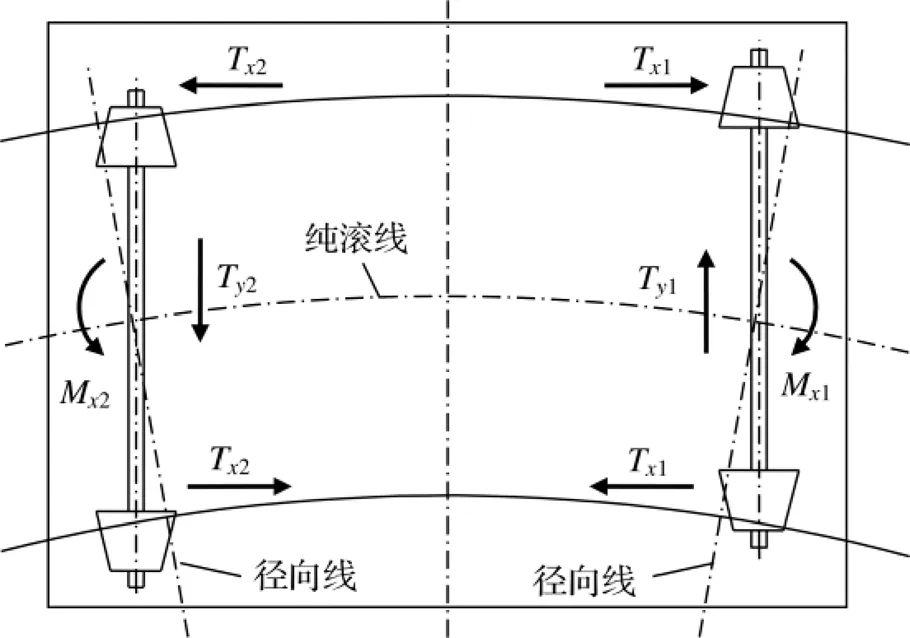
图1 转向架蠕滑力导向示意图
Wikens[9]采用静力学方法,将悬挂等效为轮对间的弯曲刚度和剪切刚度,从理论上将稳定性和曲线通过性进行了解耦,并指出可以通过降低弯曲刚度来改善曲线通过性。自导向转向架正是借助这一理论研发出来的,其本质依然是依靠蠕滑力导向,不过与传统转向架对比,其往往拥有较小的弯曲刚度以放大蠕滑力的导向作用,同时轮对间的径向机构将前后轮对的摇头耦合,从而使轮对具有趋于径向的功能。传统副构架式和轮对交叉拉杆式自导向转向架的导向机构不通过构架而直接将前后轮对耦合,因此具有较大的簧下质量,对列车动力学性能改善不利。
图2给出了适宜地铁车辆的两种自导向机构示意图,其中导向臂铰接在构架侧梁上,导向臂两端与轴箱转臂通过轴箱拉杆相连,从而将前后轮对耦合。为约束前后轮对间的同相和反相的纵向相对运动,图2(a)所示机构在Z字形连杆基础上增设了导向臂扭杆,图2(b)所示机构在Z字形连杆基础上增设了构架与导向臂的纵向减振器。
如图3所示,与自导向转向架对比,迫导向转向架在导向臂上端增设了一个车体连杆,从而利用车体与构架的相对回转,通过导向机构迫使前后轮对趋于曲线径向位置。通过曲线时,转向架会顺应曲线偏转,而此时车体仍处于切向,所以车体与转向架之间会产生偏转角,车体通过车体连杆将会带动导向臂旋转:其中曲线外侧导向臂顺时针旋转使左右车轮撑开;内侧导向臂逆时针旋转迫使左右车轮缩回,从而迫使前后轮对呈外八字形展开而趋于径向。
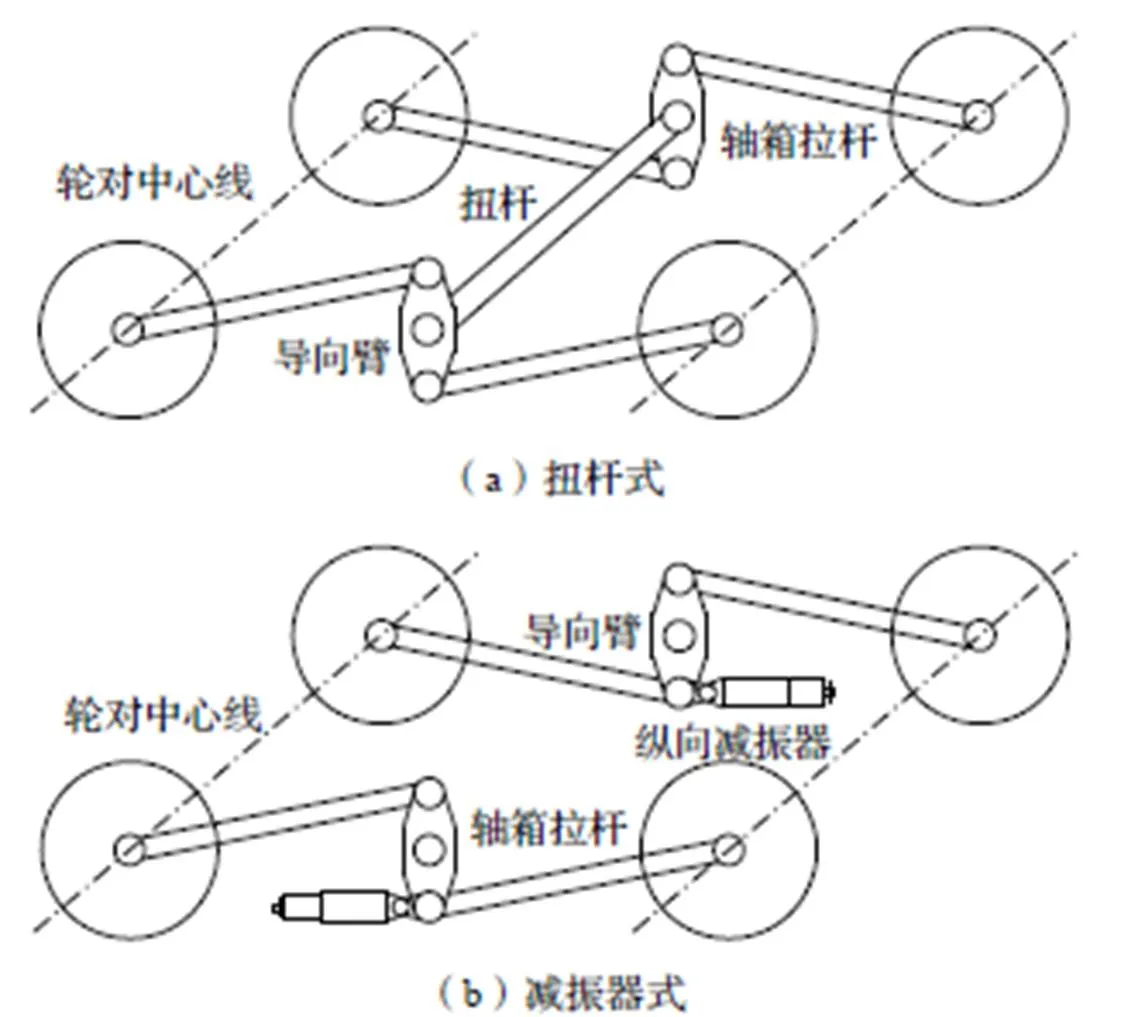
图2 自导向转向架径向机构示意图

图3 迫导向径向机构示意图
要使轮对处于径向位置,迫导向转向架的导向增益系数选取非常重要。如图4所示,通过曲线时,车体与构架的相对转角为,导向机构迫使轮对相对构架转动从而趋于径向,并设理论导向增益系数为两者比值,则有:
式中:为转向架轴距之半,m;为车辆定距之半,m;为曲线半径,m;1为导向臂轴箱连杆铰接点到构架铰接点的距离,m;2为导向臂车体连杆铰接点到构架铰接点的距离,m。
由式(3)可见,迫导向机构的理论增益系数只与定距和轴距有关,而与曲线半径和导向机构横向跨距无关。
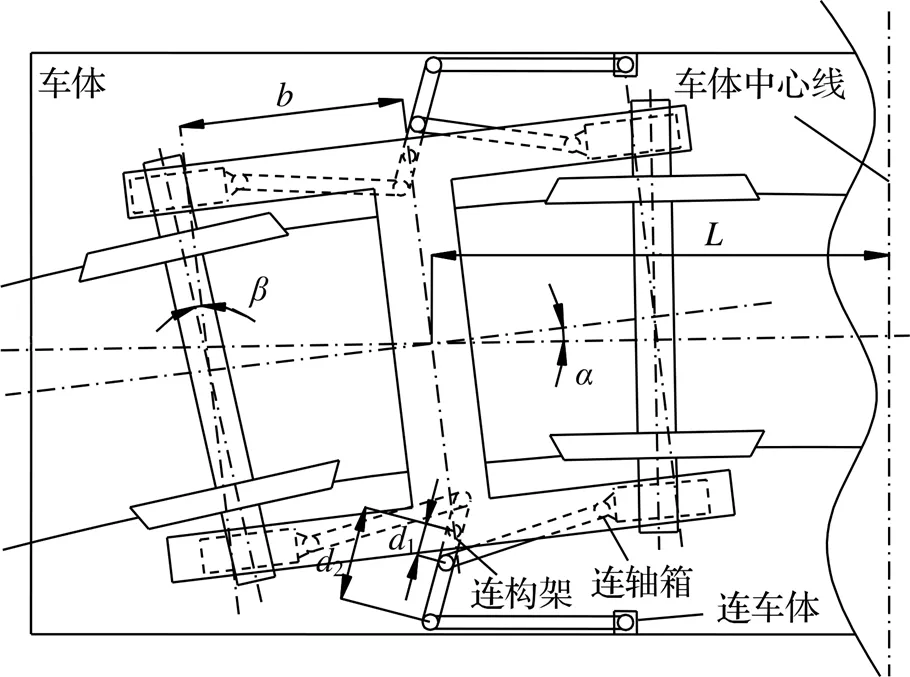
图4 迫导向转向架导向原理
2 动力学模型建立

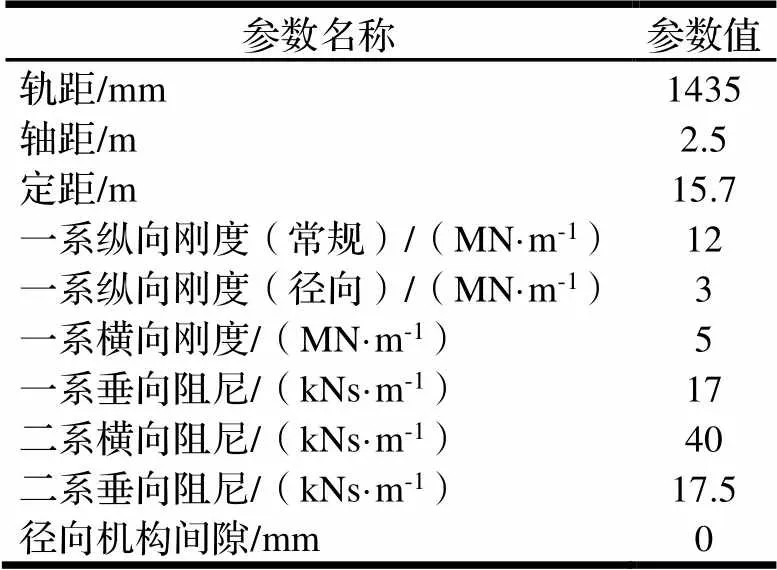
表1 转向架主要技术参数
在建模过程中充分考虑了悬挂系统和轮轨接触的非线性特征,其中径向转向架的导向机构建模采用等效力偶法[10],即忽略导向机构的质量,并将导向机构的弹性等效在轴箱连杆上。车辆的动力学微分方程为[11]:

式中:、、分别为质量、阻尼以及刚度矩阵;为车辆系统自由度的广义坐标列向量;为轮轨力向量。
仿真时不考虑导向机构的间隙,其中迫导向转向架的导向增益系数选取为理论导向增益。迫导向转向架车辆模型如图5所示。
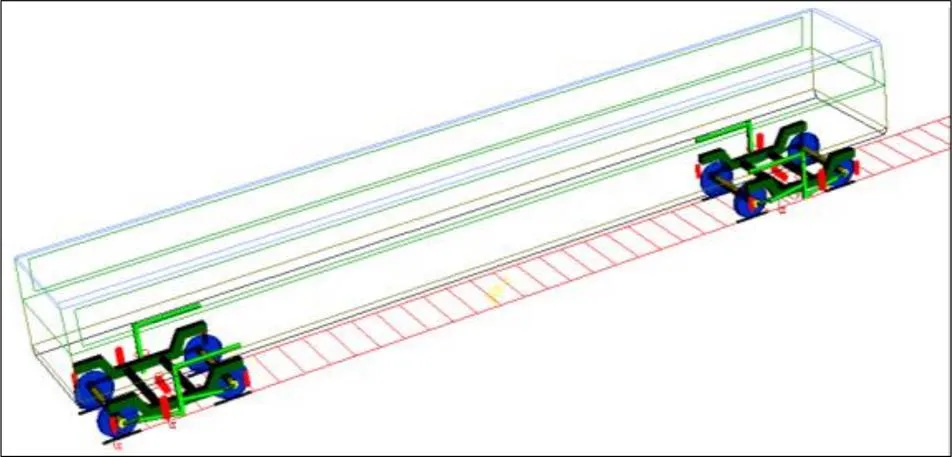
图5 迫导向转向架车辆动力学模型
3 车辆动力学性能分析
3.1 蛇行运动稳定性
径向转向架为了改善曲线通过性能往往采用很低的一系纵向定位刚度,但这在一般情况下也引起了稳定性的恶化,因此论证径向转向架稳定性尤为重要。直线稳定性的主要分析目的是确定车辆的蛇行运动分叉特征,本文采用基于非线性稳定性理论的演算法进行蛇行运动分叉分析。仿真时首先给定一段实测轨道不平顺激励并激发车辆振动,然后使其运行在无轨道激扰的理想轨道上,通过演算和观察不同速度下轮对的横移量随车辆行程能否收敛来判断是否发生蛇行失稳。
根据上述计算方法,分别将LM踏面(等效锥度0.1)和磨耗后LM踏面(等效锥度0.6)输入到车辆模型中进行仿真分析,仿真结果如图6所示。传统、自导向无纵向减振器、自导向有纵向减振器以及迫导向转向架四种地铁车辆新轮临界速度分别为200 km/h、180 km/h、190 km/h、145 km/h;磨耗轮临界速度分别为175 km/h、135 km/h、150 km/h、175 km/h。可以看出,相对于传统转向架,自导向转向架由于大大降低了一系纵向定位节点刚度,导致临界速度有所下降,其中磨耗轮临界速度下降较为明显,降幅达23%;若在自导向径向机构上装有纵向减振器,可明显提高车辆的临界速度。迫导向转向架的导向机构相对于自导向机构可以提供更大的剪切刚度,所以在磨耗轮下弥补了一系纵向刚度较低的影响,有着与传统转向架相当的临界速度;但在新轮踏面下却导致了相反的效果,其在145~195 km/h存在小幅失稳的现象,直到200 km/h才大幅失稳。这是由于迫导向机构直接连接轮对、构架与车体,消弱了二系的隔振效果,同时车体左右连杆也附加了一个摇头力矩,导致迫导向转向架在低锥度下容易发生一次蛇行失稳,所以新轮临界速度较传统转向架大幅下降。
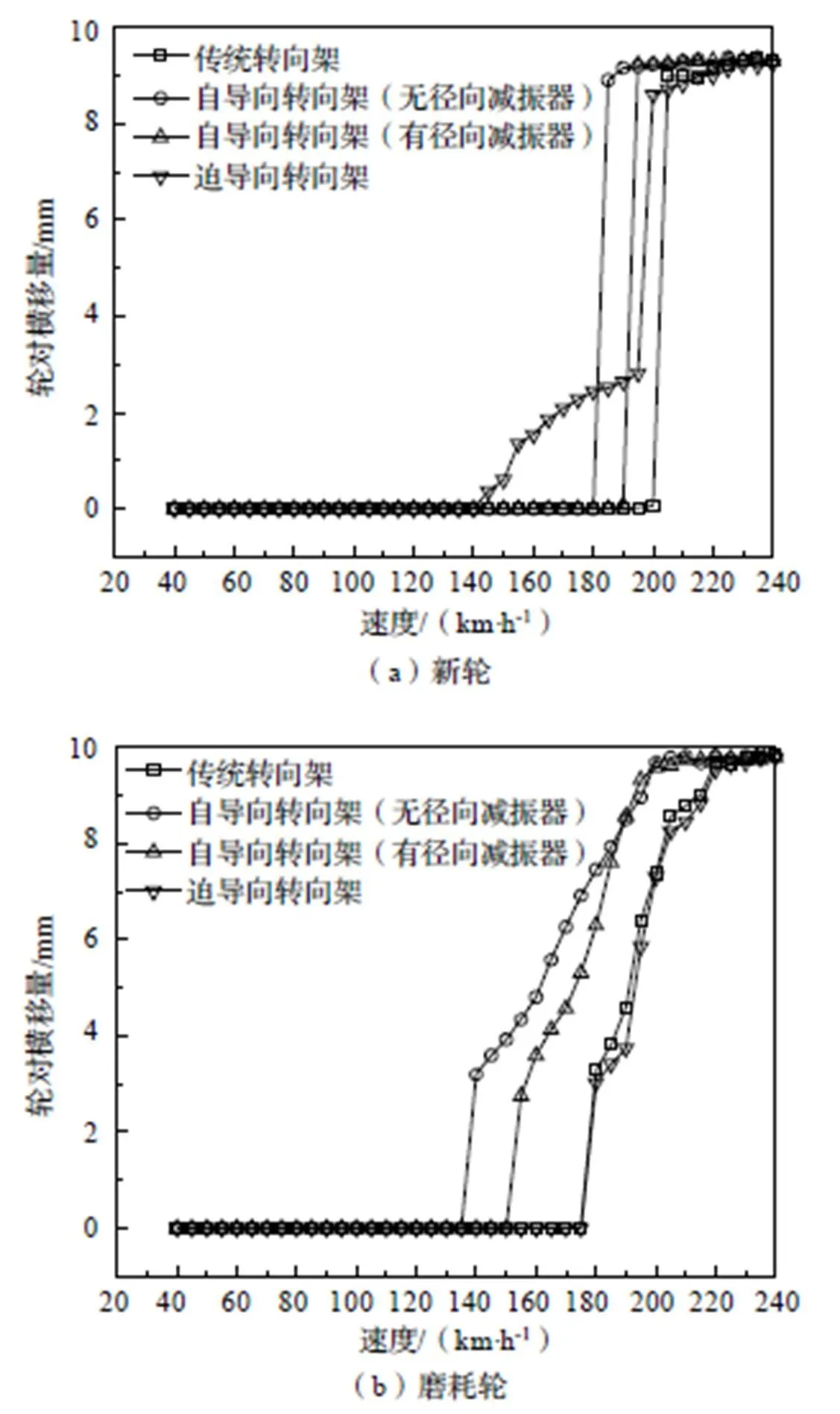
图6 临界速度
由于自导向机构附加的纵向刚度较小,增大连杆导向刚度来提高稳定性的效果有限,同时较大的导向刚度对轮对径向不利,优化导向刚度难以兼顾稳定性和曲线通过性,因此有必要在自导向径向机构上附加纵向减振器并对其阻尼系数进行优化。从图7可以看出,增大减振器阻尼可以明显提高自导向转向架的蛇行运动稳定性。
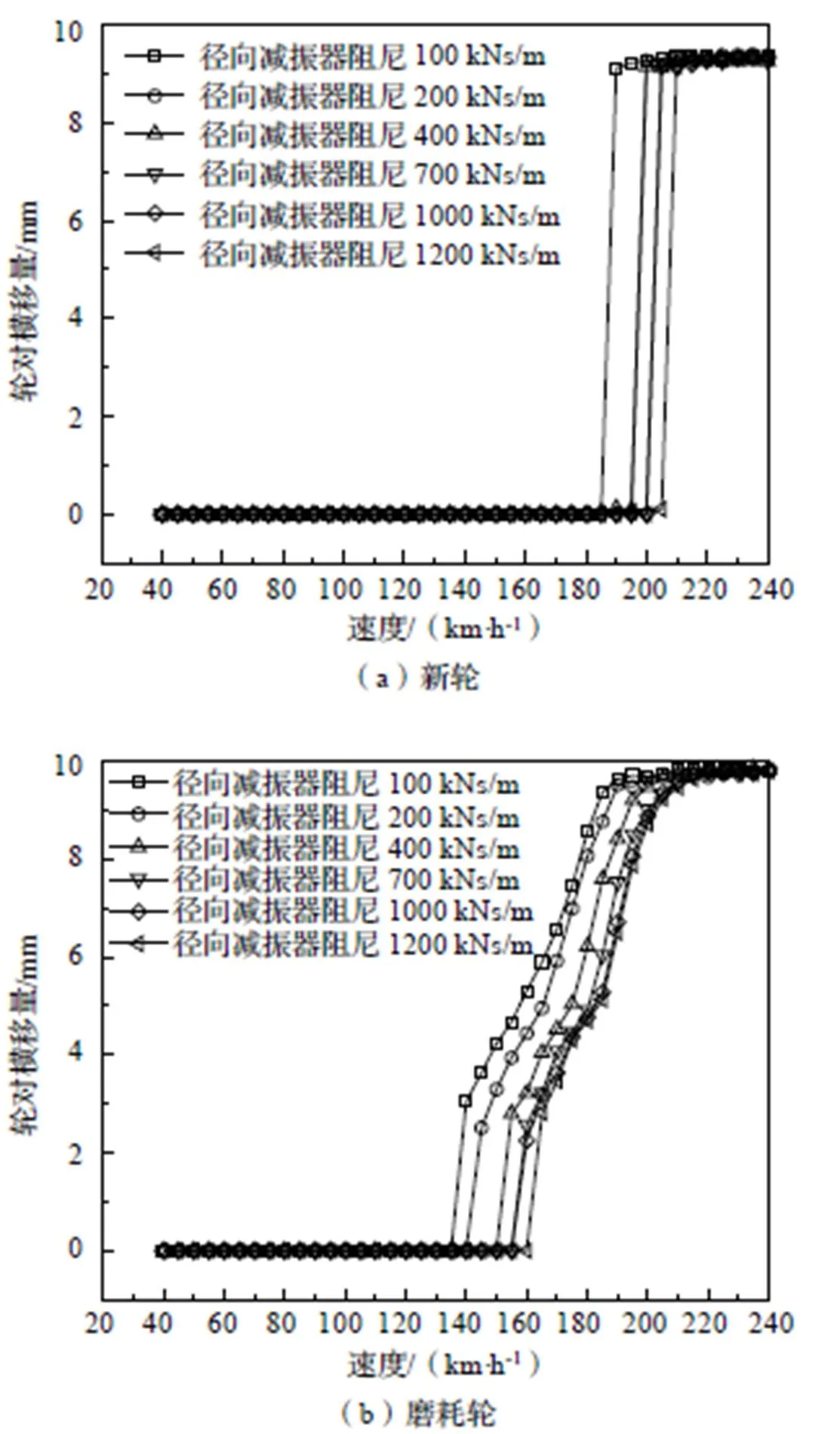
图7 减振器阻尼对自导向转向架稳定性的影响
迫导向机构相对于自导向机构可以附加更大的纵向定位刚度,同理分析可知,增大导向刚度虽然可以提高磨耗轮的临界速度,但是低锥度下小幅失稳现象会加剧,与此同时,越大的导向刚度径向效果越差。因此,为解决迫导向转向架低锥度失稳的问题,可以考虑在迫导向机构上增加纵向减振器或通过参数匹配来提高稳定性。本文考虑到迫导向机构附加刚度直接影响了轮对间剪切刚度,故采取动力学参数匹配的方法在保证低一系纵向刚度的同时对一系横向定位刚度进行优化分析。从图8中可以看出,在新轮状态下,随着一系横向定位刚度的减小,迫导向转向架小幅失稳现象逐渐消失,临界速度显著提高,但是在磨耗轮状态下,随着横向定位刚度的减小,其临界速度逐渐下降,因此从兼顾车轮服役周期内稳定性的角度来说,优化后该型车辆迫导向转向架一系横向定位刚度取为2 MN/m,此时磨耗轮临界速度为160 km/h,依然有33%的安全裕量。
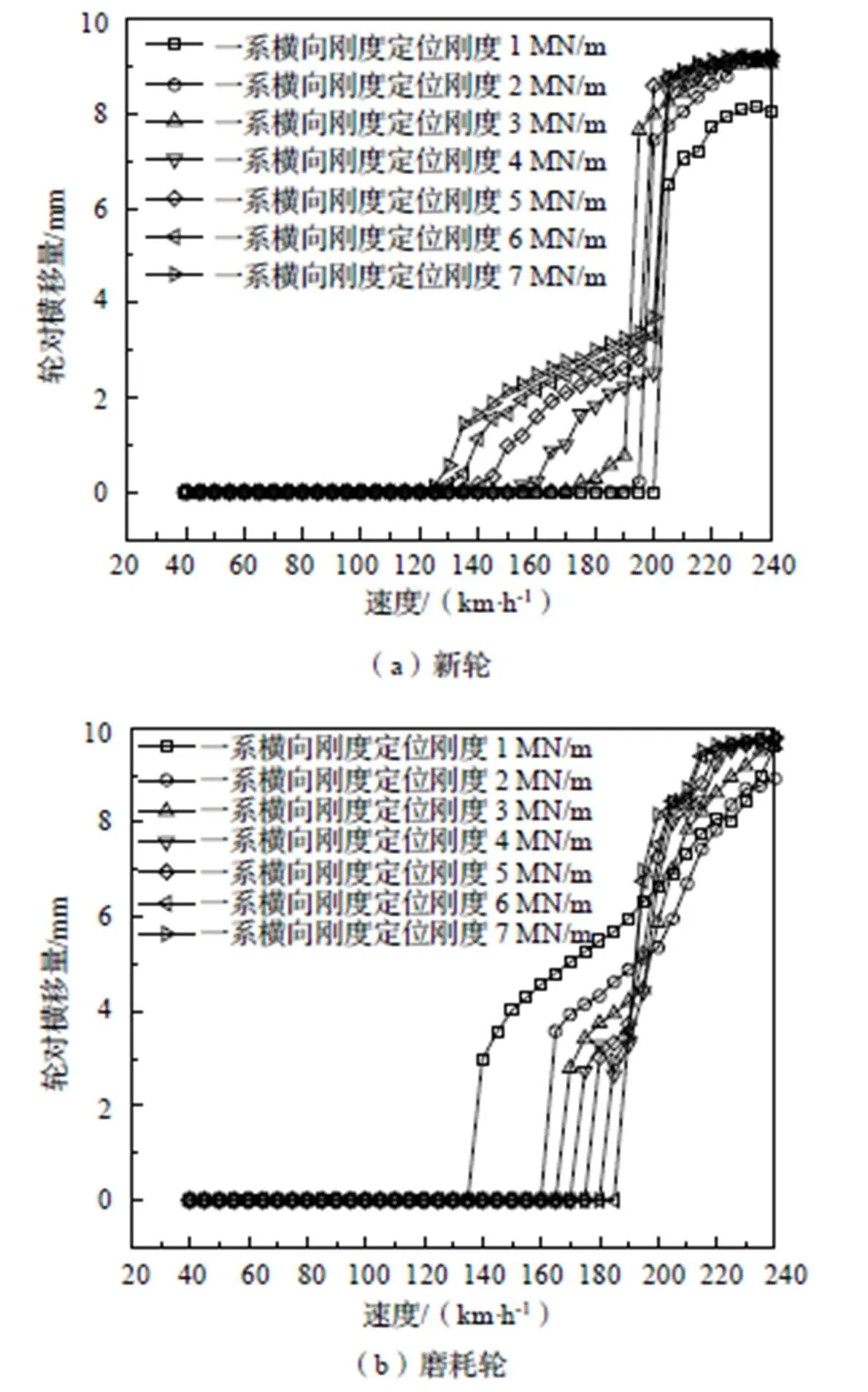
图8 一系横向刚度对迫导向转向架稳定性的影响
3.2 曲线通过性能分析
在满足稳定性的基础上,比较分析不同转向架的曲线通过性,此时传统、自导向、迫导向转向架一系纵向定位刚度分别为12 MN/m、3 MN/m、3 MN/m,一系定位横向刚度分别为 5 MN/m、5 MN/m、2 MN/m,自导向转向架附加径向减振器阻尼为1000 kNs/m,其余参数一致。参考GB 50157-2013[12]设置曲线半径、缓和曲线长度以及轨道超高,具体仿真线路条件如表2所示。
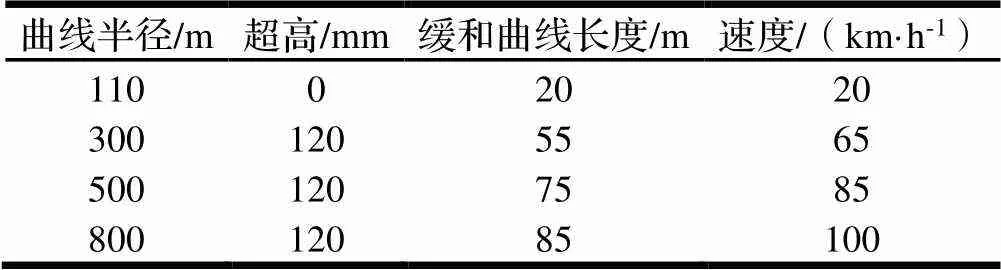
表2 曲线通过线路设置
图9所示为三种转向架通过无轨道激扰800 m曲线半径时前转向架各轮对的横移量、冲角、磨耗功以及轮轴横向力。磨耗功的定义为磨耗指数乘以相对滑动速度,计算方式为:

式中:P为磨耗功,kN·m/s;Fξ、Fη为纵、横向蠕滑力,kN,Mφ为自旋蠕滑力矩,kN·m;ξ、η、分别为纵、横向以及自旋蠕滑率;vref为轮轨相对滑动速度,m/s。
仿真结果表明:120 km/h A型地铁采用传统转向架通过曲线时,其导向轮冲角、磨耗功以及轮对横移明显大于非导向轮,这是由于传统转向架较大的一系纵向定位刚度限制了蠕滑力的导向效果。自导向转向架减小了一系纵向定位刚度,在蠕滑力和径向辅助机构的作用下轮对朝纯滚线横移,以具有一个较好的曲线通过姿态,导向轮冲角和磨耗功显著降低,使轮对间分配更为均匀,与此同时,轮轴横向力也有所降低,从而可以减轻钢轨的损坏程度。迫导向转向架依靠车体和构架的相对回转迫使轮对趋于径向,因此相对自导向转向架其在冲角、磨耗功以及轮轴横向力等方面更具优势。在800 m曲线半径下,地铁车辆采用自导向转向架可将导向轮冲角和磨耗功减小到传统车辆的40%左右,而采用迫导向转向架可减小到15%左右。理论分析可知,左右侧径向机构会对迫导向转向架构架额外施加一个摇头力矩,导致构架欠径向,所以迫导向转向架并不能使所有轮对完全处于径向位置。
图10、图11所示为三种转向架通过不同曲线时的第一轮对冲角和磨耗指数,以对比其径向效果。从图中可以看出,随着曲线半径的增大,轮对冲角和磨耗指数逐渐减小;相对于自导向转向架,迫导向转向架改善冲角效果最好,当曲线半径大于300 m时,只有迫导向转向架可以将冲角控制在2 mrad范围内;其中自导向转向架在极小半径曲线径向效果不佳,这是由于前后轮对横移加大而贴靠轮缘,此时主要依靠轮缘力导向而导致冲角和磨耗加大,因此自导向转向架依靠蠕滑力导向更易在大半径曲线上发挥作用。
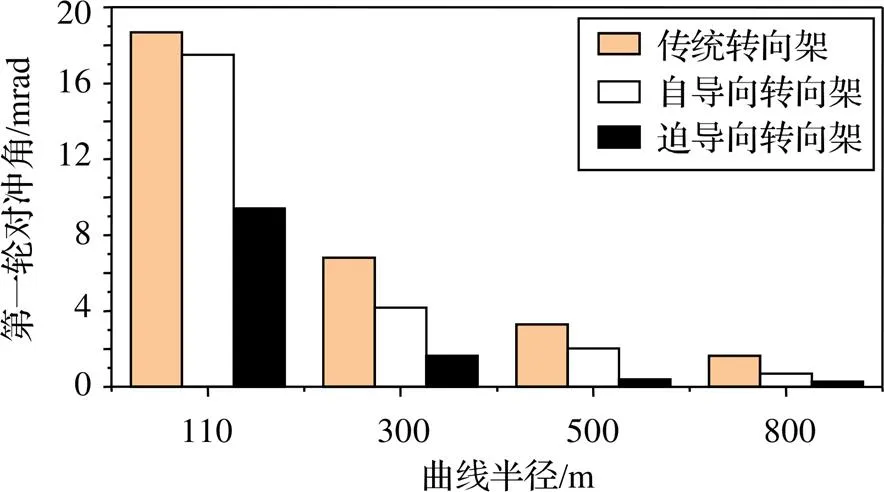
图10 第一轮对冲角
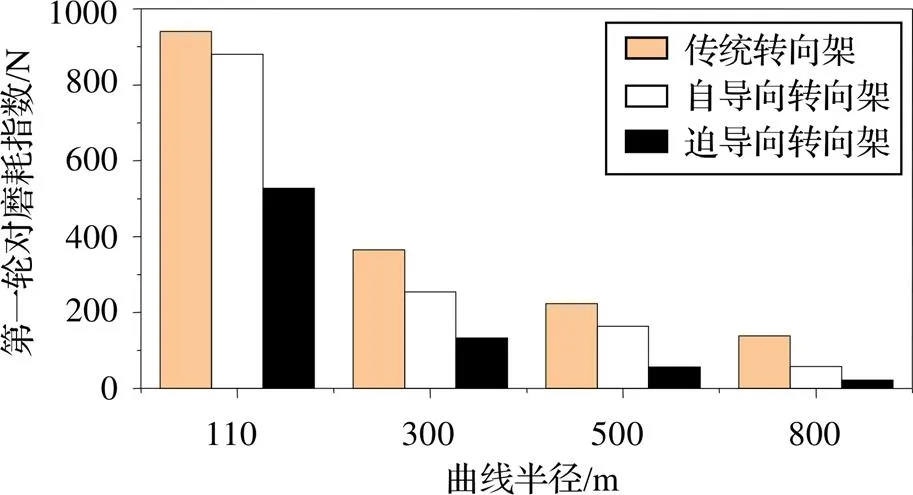
图11 第一轮对磨耗指数
4 结论
(1)降低一系定位纵向刚度,有利于改善曲线通过性能,但会降低自导向转向架的稳定性(尤其是磨耗轮状态),若是在自导向机构上安装纵向减振器,可以有效弥补定位节点刚度的不足,提高临界速度;迫导向转向架径向机构附加纵向刚度可以提高磨耗轮的稳定性,但迫导向机构也消弱了二系的隔振效果,容易在低锥度下引起车辆失稳,但是通过合理匹配一系横向定位刚度可以改善其蛇行稳定性。
(2)相对于传统转向架,自导向转向架可以有效改善曲线上的轮对冲角和磨耗,但有一定适用范围,主要是对车辆通过大于300 m的曲线半径时的效果较好;相对于自导向转向架,迫导向转向架可以明显改善曲线通过性能,其在小半径曲线上也能取得良好的效果。
[1]李芾,傅茂海,黄运华. 车辆径向转向架发展及其动力学特性[J]. 交通运输工程学报,2003(1):1-6.
[2]邹鹏. 径向转向架的发展及其动力学分析[J]. 铁道机车车辆工人,2008(5):1-5.
[3]李金城,丁军君,杨阳,等. 径向转向架地铁车辆动力学性能及车轮损伤研究[J]. 机车电传动,2019(1):98-103.
[4]李芾,傅茂海,卜继玲. 200 km/h提速客车径向转向架动力学性能研究[J]. 铁道学报,2004(1):22-27.
[5]刘宏友,曾京,李文学. 迫导向转向架导向机构参数对动力学性能的影响[J]. 铁道车辆,2002(7):1-4,19-1.
[6]Garcia J F,Olaizola X,Martin L M,et al. Theoretical comparison between different configurations of radial and conventional bogies[J]. Vehicle System Dynamics,2000,33(4):233-259.
[7]砥上靖弘,李伟平. 日本银座线地铁车辆采用导向转向架的运行状况[J]. 国外铁道车辆,2016,53(1):26-30.
[8]胥朝霞,傅茂海,胥夕明,等. 转臂式城轨车辆转向架径向机构运动学分析[J]. 机械工程与自动化,2017(2):76-77,80.
[9]WICKENS A. H. Steering and dynamic stability of railway vehicles[J]. Vehicle System Dynamics,1975(5):15-46.
[10]刘宏友,李莉,李文学. 杠杆式迫导向转向架动力学性能研究[J]. 中国铁道科学,2002(3):39-46.
[11]刘永强,戴焕云. 铁道车辆动力学模型设计及优化分析[J]. 机械,2018,45(12):1-3.
[12]中华人民共和国住房和城乡建设部,中华人民共和国国家质量监督检验检疫总局. 地铁设计规范:GB 50157-2013[S]. 北京:中国建筑工业出版社,2014.
Dynamics Performance of 120 km/h Type A Metro Vehicle Radial Bogie
XIAO Quanyi,CHI Maoru,LIANG Shulin
( State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China )
In order to improve the curve passing performance of metro bogies and ensure good stability at the same time, three dynamic models of metro vehicles, including traditional, self-steering and forced-steering vehicles, were established based on the steering principle of radial mechanism and the multi-body dynamics simulation software. Dynamics performances of different bogies were compared and analyzed. The results show that the radial bogie can significantly reduce the angle of attack and wear of wheel and rail, but the radial effect of self-steering bogie is not ideal in small radius curve.In order to improve the stability of the vehicle, the radial mechanism of self-steering bogie needs to be equipped with large damping shock absorber, and the forced-steering bogie should match the suspension parameters to prevent lateral instability of vehicles with low equivalent conicity.
metro vehicle;self-steering radial bogie;forced-steering radial bogie;dynamics performance
U270.3
A
10.3969/j.issn.1006-0316.2021.10.009
1006-0316 (2021) 10-0059-07
2021-02-26
国家重点研发计划(2018YFB1201701);牵引动力国家重点实验室自主课题(2018TPL_T04)
肖权益(1996-),男,四川达州人,硕士研究生,主要研究方向为轨道车辆系统动力学,E-mail:xiaoquanyi2020@163.com;池茂儒(1973-),男,四川通江人,博士,研究员,主要研究方向为轨道车辆系统动力学。
猜你喜欢
中国新技术新产品(2021年10期)2021-08-26
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
重型机械(2020年3期)2020-08-24
哈尔滨铁道科技(2020年4期)2020-07-22
制造技术与机床(2019年12期)2020-01-06
铁道机车车辆(2019年5期)2019-11-11
数学年刊A辑(中文版)(2019年3期)2019-10-08
铁道建筑(2019年4期)2019-04-29
西南交通大学学报(2018年5期)2018-11-08