
一种干涉仪测向系统实时相位校正方法
2021-11-05 07:47中国电子科技集团公司第二十九研究所邓兴智田肇鹏
电子世界 2021年17期
中国电子科技集团公司第二十九研究所 邓兴智 田肇鹏 黄 昀
在电子战系统中,电子侦察设备主要完成目标信号的测向、定位、识别,同时引导电子干扰设备对目标进行干扰。电子侦察采用的测向体制通常有比幅测向、时差测向、干涉仪测向,其中多基线干涉仪测向体制实现相对简单,技术成熟,同时具有高灵敏度、高精度、速度快等优点,得到广泛应用。
在多基线干涉仪测向系统中,前端的天线基线设计以及后端的算法设计决定了系统性能,而系统本身以及外部环境造成的鉴相误差的消除,对系统效能也起到了至关重要的作用,因此,系统相位校正方案也是设计时需要重点考虑的环节。本文介绍了干涉仪测向的基本原理,并分析了鉴相误差的来源以及传统干涉仪测向系统相位校正方法的局限,提出了一种实时相位校正方法,该方法可根据系统需要对相位进行实时校正,以有效提高系统的测向精度。
1 干涉仪测向原理
单基线干涉仪测向原理如图1所示。两个天线之间的距离(基线长度)为D,波长为λ的信号入射角为θ。单基线干涉仪测向是通过求得两路信号的相位差Φ,进而得到入射角θ的值。
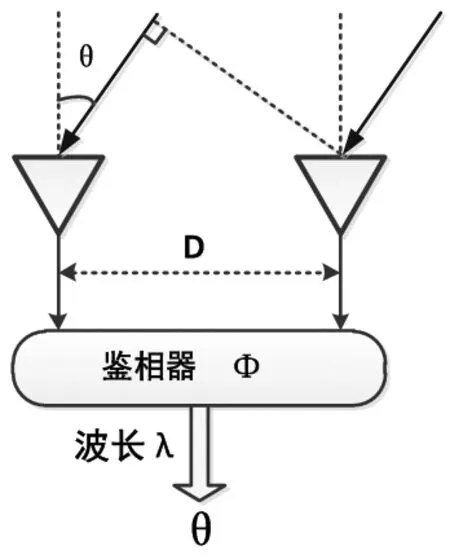
图1 单基线干涉仪测向原理

由式(1)可知,若已知基线长度D,只要测得相位差Φ和信号波长λ即可得到入射角θ:

2 干涉仪测向误差来源分析
对式(1)求微分得到:
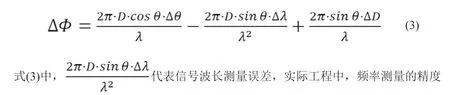
从式(5)不难看出:
(1)测向误差随信号波长λ增大而增大,随基线长度D增大而减小,因此,设计中低频段干涉仪测向系统的基线长度通常比高频段的基线长,工程中为了提高测向精度,增加基线长度是比较有效的办法。
(2)测向误差与侦收的目标信号入射角θ有关,随入射角的增大而增大。一般工程中,干涉仪测向系统的侦察范围为±60°以内,如果需覆盖更宽的空域范围,物理上可采用增加天线阵与接收处理通道实现。
(3)测向误差与鉴相误差ΔΦ有关,随鉴相误差的增大而增大。当干涉仪测向系统的工作频率范围、空域覆盖范围、基线设计确定后,如何减小鉴相误差以提高测向精度成为系统设计的重点。
典型的多基线干涉仪测向系统鉴相链路如图2所示,主要由天线、射频链路、相位测量电路三部分组成,这三部分均会产生鉴相误差。

图2 多基线干涉仪测向系统鉴相链路
(1)由于不同天线难免存在个体差异以及天线间互耦效应的存在,同时受安装空间限制,天线间的相位一致性很难控制得很好,将导致后端产生鉴相误差。
(2)射频链路中存在较多有源器件,器件的相位一致性、器件间互联走线或电缆的一致性也很难精确控制,同时有源器件在不同环境下性能会发生变化,尤其是随温度变化相位会漂移,这些因素都将导致最终的鉴相误差。
(3)相位测量电路中,AD的有效量化位数以及链路的信噪比高低,都将影响鉴相精度,尽可能选择有效量化位数高的AD,同时保证系统链路的信噪比。
以上所述的鉴相误差,工程中通常采用系统外校正、内校正相结合的方式来消除。
3 传统相位校正方法
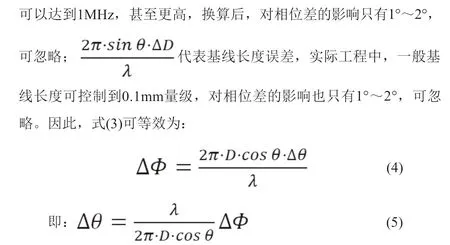
传统的干涉仪测向系统相位校正方法如图3所示。
图3 传统相位校正方法
(1)外校正:经计算机控制信号源产生外校正信号,外校正信号经功放、发射天线向测向系统辐射,此时射频前端的工作校正开关打到工作状态,根据干涉仪数字接收机对各通道的相位测量结果来实现各通道全链路的相位校正。
(2)内校正:将射频前端的工作校正开关打到校正状态,系统不接收来自天线的外部信号,由干涉仪数字接收机内部的校正源产生内校正信号,根据干涉仪数字接收机对各通道的相位测量结果来实现各通道除天线到射频前端开关之前部分的相位校正。
传统相位校正方法一般是采用外校正、内校正相结合的方式来使用。由于测向系统装机后,通常外校正工作不便于开展,同时天线到射频前端开关之前部分为无源电路无需频繁校正,因此,外校正只在测向系统装机前或定期开展,而内校正在每次系统加电都会进行一次。内校正频度较高,具有一定的实时性,但是内校正无法实现天线到射频前端开关之前部分的相位校正。工程上是将前面同期获得的内外校数据相减得到天线到射频前端开关之前部分的校正数据ΔΦ天线,系统每次上电完成内校正得到的相位校正数据加上ΔΦ天线,便得到系统所需相位校正数据。

传统相位校正方法是目前大多数干涉仪测向系统采用的校正方法,该方法可以较好的保证系统的测向精度,但是由于其实时性不高,导致某些情况下系统测向精度较差:
(1)对于机载干涉仪测向系统,当载机飞行于不同高度,由于温度变化的原因,导致通道间相位一致性恶化,从而导致鉴相误差大,测向精度降低。虽然可通过在温箱提前测试系统在不同温度下的校正数据后存储于系统内来改善,但是由于资源有限,无法得到连续温度、所有频点的校正数据。
(2)系统使用过程中,由于偶发或环境原因,部分电路硬件发生轻微变化导致部分通道相位畸变,直接导致测向误差较大或测向失败。
4 实时相位校正方法
为了解决传统相位校正方法的实时性问题,改进系统内校正硬件方案,如图4所示。

图4 实时相位校正硬件方案
系统主要通过对开关1和开关2进行控制,实现不同的工作模式切换:
(1)开关1导通,开关2关断:正常工作模式(非实时校正)、外校正模式。
(2)开关1关断,开关2导通:仅内校正模式。
(3)(1)开关1导通,开关2导通:正常工作模式(实时校正)。
(4)开关1关断,开关2关断:噪底采集模式、匿影模式。
系统上电后,首先对开关1和开关2进行控制,完成内校正、采噪底,然后导通开关1进入正常工作模式,正常工作模式下根据测向效果评估是否导通开关2启动实时校正。实时校正会占用系统资源,因此该模式不是内校正的重复,而是根据侦收目标对象选择部分频点进行实时校正,以合理利用系统资源。实时相位校正流程如图5所示。

图5 实时相位校正流程设计
采用实时相位校正方法可以有效改善测向精度,仿真结果如图6所示,该方法能有效避免由于环境因素导致的测向精度跳变。

图6 测向误差仿真结果
结束语:理论和仿真结果表明,本文提出的干涉仪测向系统实时相位校正方法可以有效解决实际工程中系统测向精度由于实时性不高、受环境影响出现测向精度跳变的问题。该方法实现难度低,具有较高的工程应用价值。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
科学(2020年5期)2020-11-26
计测技术(2020年6期)2020-06-09
中国惯性技术学报(2019年3期)2019-10-15
航天电子对抗(2019年4期)2019-06-02
制导与引信(2017年3期)2017-11-02
舰船电子对抗(2016年5期)2016-12-13
出版参考(2014年21期)2014-12-25
现代出版(2014年4期)2014-09-16
现代出版(2014年4期)2014-09-16
