
基于复合滤波的座舱显示阻尼处理技术研究
2021-11-03 08:00江忠英
电子技术与软件工程 2021年16期
江忠英
(海装驻武汉地区军事代表局驻南昌地区军事代表室 江西省南昌市 330000)
1 引言
随着现代计算机技术和电子信息技术的飞速发展,座舱显示系统已逐步由繁琐的机械仪表转变为智能数字显示,实现高度综合化、智能化。利用SMART 显示器(MFD)对全机各种信息进行综合显示,给飞行员提供一种大视野,更详细的参数显示,同时对参数进行整合,将最终结果更直观的显示在MFD 上,减少飞行员的工作负担,提高人机功效。
目前,各型直升机的MFD 采用实时显示方式,对航电设备传输的数字信号按实际内容直接显示。但在实际飞行中,飞行员发现某些参数会来回抖动,例如指示空速、气压高度、仪表着陆系统等大气参数和组合接收设备参数,有时候电台发射时,油量值会产生瞬间脉冲跳变,容易给飞行员带来困扰和误操作。
鉴于此,本文提出一种基于复合滤波的阻尼处理技术,利用飞参采集的飞机真实值进行大量仿真和测试,并将该技术应用到直升机上。
2 滤波原理
在直升机座舱显示中,数字滤波是一个计算过程,对航电设备传输的消息进行数学运算,使参数显示具有阻尼效果,无需硬件,只要适当改变滤波程序有关参数,就能方便改变滤波特性,能适应具有不同特性的飞行参数。因此可靠性高,不存在阻抗匹配、特性波动、非一致性等问题。
2.1 限幅滤波法和一阶滞后滤波法
限幅滤波法又称程序判别法,通过程序判断被测信号的变化幅度,从而消除缓变信号中的尖脉冲干扰。具体方法是,依赖已有的时域采样结果,将本次采样值与上次采样值进行比较,若它们的差值超出允许范围,则认为本次采样值受到了干扰,应予剔除,设yn为第n 次采样值,
为第n 次滤波值,采样值和滤波值的差值如下:

在式(1)中,我们取差值的绝对值作为本次采样值的变化量,我们规定相邻两个采样值最大允许增量为,如果本次值与上次值之差大于,则认为本次值无效,放弃本次值,用上次值代替,如果差值小于等于,则取本次值,公式如下:

限幅滤波法的优点是能有效克服因直升机偶然因素引起的脉冲干扰,如电台发射时导致的油量值瞬间跳变,该方法适合于变化比较缓慢的被测量,但无法抑制那种周期性的干扰,平滑度差。
一阶滞后滤波法是用软件的方法实现硬件的RC 滤波,以抑制干扰信号。用此种方法处理低频干扰时,首先遇到的问题是要求滤波器有大的时间常数(RC)和高精度的RC 网络。时间常数越大,其漏电流也必然增大,从而使RC 网络精度下降。采用一阶滞后的数字滤波法,能很好克服这种模拟量滤波器的缺点,同样假设yn为第n 次采样值,为第n 次滤波值,得到一阶滞后滤波法如下:


在式(4)中,T 为采样周期,Tf为滤波周期。
一阶滞后滤波法的优点是能对周期性干扰具有良好的抑制作用,适用于波动频率较高的场合,但相位滞后,灵敏度低,滞后程度取决于值大小,不能消除滤波频率高于采样频率1/2 的干扰信号。
2.2 复合滤波法
直升机座舱显示系统是一个多元复杂系统,如图1所示,在战场中常与其它飞行器、卫星联合作战,负责全机各种信息的综合显示。为实现参数显示阻尼效果,既要消除大幅度的脉冲干扰,又要求数据平滑,将以上两种滤波方法组合起来,形成复合数字滤波器。

图1:单个显示画面(示例)
设yn为第n 次采样值(输入值),为第n 次滤波值(输出显示值),为第n-1 次滤波值,k 为周期比系数,与采样周期T 有关,Tf为滤波周期,相邻两个采样值的最大允许增量计算如下:

在式(5)中,最大允许增量Maxoffset 是Tf的增函数。
设d 为采样值与滤波值的差值,计算如下:

利用该差值可以得到第n 次滤波值为:

该复合滤波法在判定差值|d|小于等于Maxoffset 时,滤波值取当前采样值;反之,滤波值为当前采样值减去自然指数e 的指数次方与差值的乘积,兼具限幅滤波法和一阶滞后滤波法的优点,既能抑制飞行参数大幅度的脉冲干扰,又使数据显示更平滑,消除抖动,实现阻尼效果。
由于复合滤波法的周期比系数k、滤波周期Tf和数据最大值可调,因此在编程计算时,只需对参数进行适当软件修改,就能适应不同类型的参数滤波,实用性更强。
3 实验分析
为模拟直升机真实环境滤波效果,实验中的数据源采用飞行参数采集器(飞参)记录的直升机飞行数据,选取3 组参数进行复合滤波分析,分别为:指示空速、绝对气压高度、无线电罗盘方位角。
3.1 数据滤波处理
飞行参数采集器记录的数据为data_source.LST 文件,如图2所示。从图中可以看出,飞行参数采集器的采集时间为09:52:16:028 ~11:51:57:594,指示空速和绝对气压高度采集时间间隔为31ms,无线电罗盘方位角采集时间间隔为100ms。

图2:飞行参数采集器数据源
复合滤波算法设计中,inputValue 为真实输入值,k 为周期比系数,Tf为滤波周期,old_FilterValue 为上一次滤波输出值,max_value 为数据最大值。通过软件可以将指示空速、绝对气压高度、无线电罗盘方位角提取出来,并按照每个参数的特性做滤波处理。
3.2 滤波周期选择
为确定直升机综合显示控制系统中的Tf值,实验选取同一组数据(周期比系数k 固定),用4 个不同滤波周期Tf对比分析,如图3所示。

图3:滤波周期对比
从图3 可以看出,滤波周期Tf越大,输出越失真、相位更滞后,达不到预期效果,当Tf为0.25 时,既能抑制参数瞬间跳变,又能使滤波输出趋于平滑;与此同时,当前直升机作战飞行软件的任务周期为50 毫秒,在0.25 秒(5 个任务周期)内MFD 足以响应综合任务处理机的数据变化。因此,直升机综合显示控制系统的Tf取0.25。
3.3 实施效果
MATLAB 是一款功能非常强大的数学软件,本实验利用MATLAB 对以上原始数据及滤波后数据进行图形仿真。
指示空速仿真如图4所示,蓝色虚线为滤波前数据,红色实线为滤波后数据,本实验飞参采集的指示空速数据共231394 组。子图1 为所有数据滤波前后对比,子图2 为截取时间7500 ~8200(单位:31 毫秒)放大显示,子图3 为截取时间9220 ~9400(单位:31毫秒)放大显示。从中可以看出,该阻尼处理技术跟随性很好,能准确反映整个飞行过程中的指示空速实际状态,有效滤除时间7689、7712、7940 处的尖峰脉冲,对时间7558、7714、7741、7759、7883、7898、7942、7959、8019、8074、9258、9266 处 数据阶跃跳变起到很好的缓冲作用,使数据显示更平滑,实现阻尼效果。
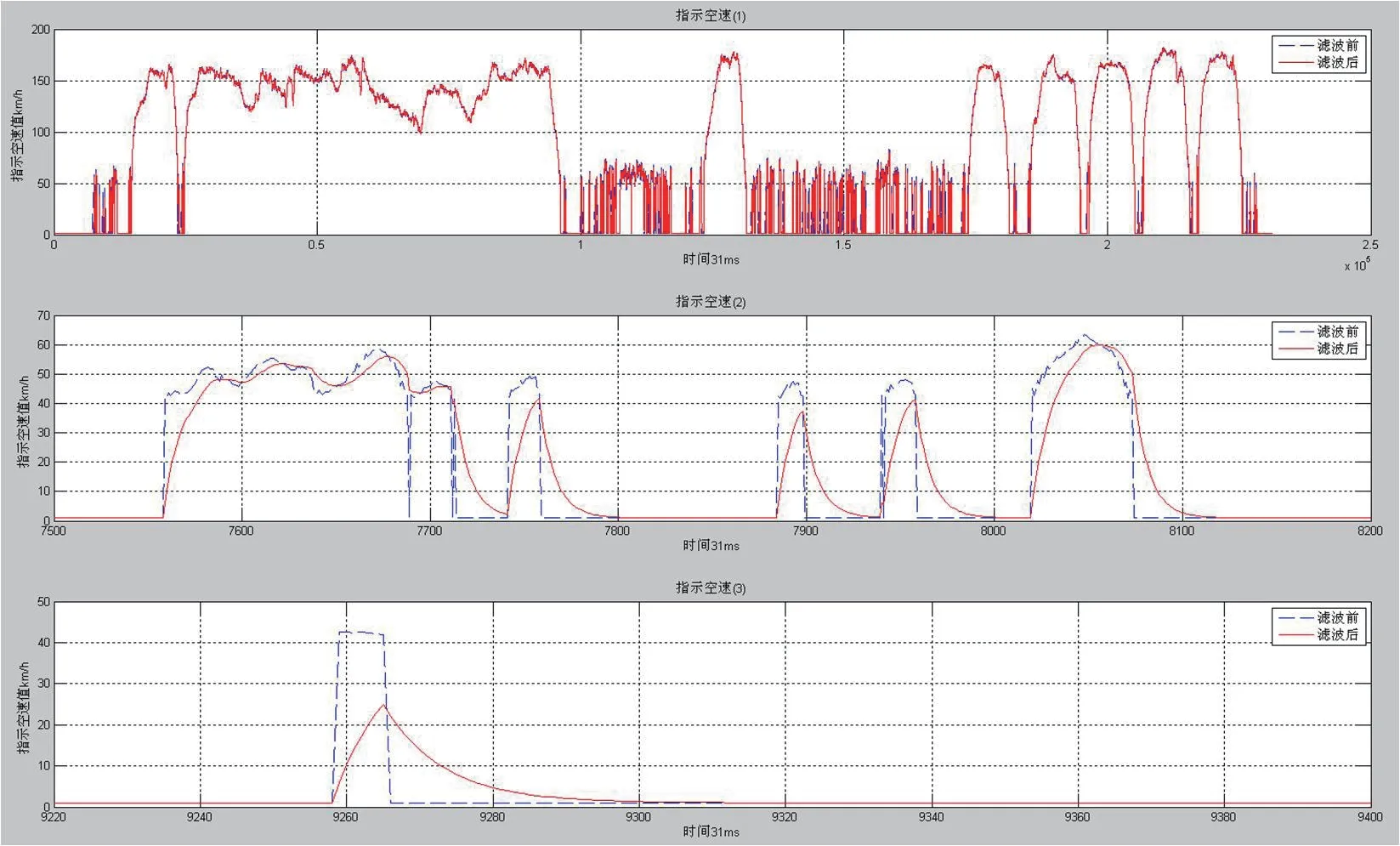
图4:指示空速仿真
绝对气压高度仿真如图5所示,飞参采集的数据共231394组。子图1 为所有数据滤波前后对比,子图2 为截取时间7400 ~9000( 单位:31 毫秒) 放大显示,子图3 为截取时间85500 ~86000(单位:31 毫秒)放大显示。从中可以看出,该阻尼处理技术对绝对气压高度跟随性很好,不存大的阶跃跳变数据,对于数据来回抖动起到显著滤波效果,使数据显示更趋于平滑。
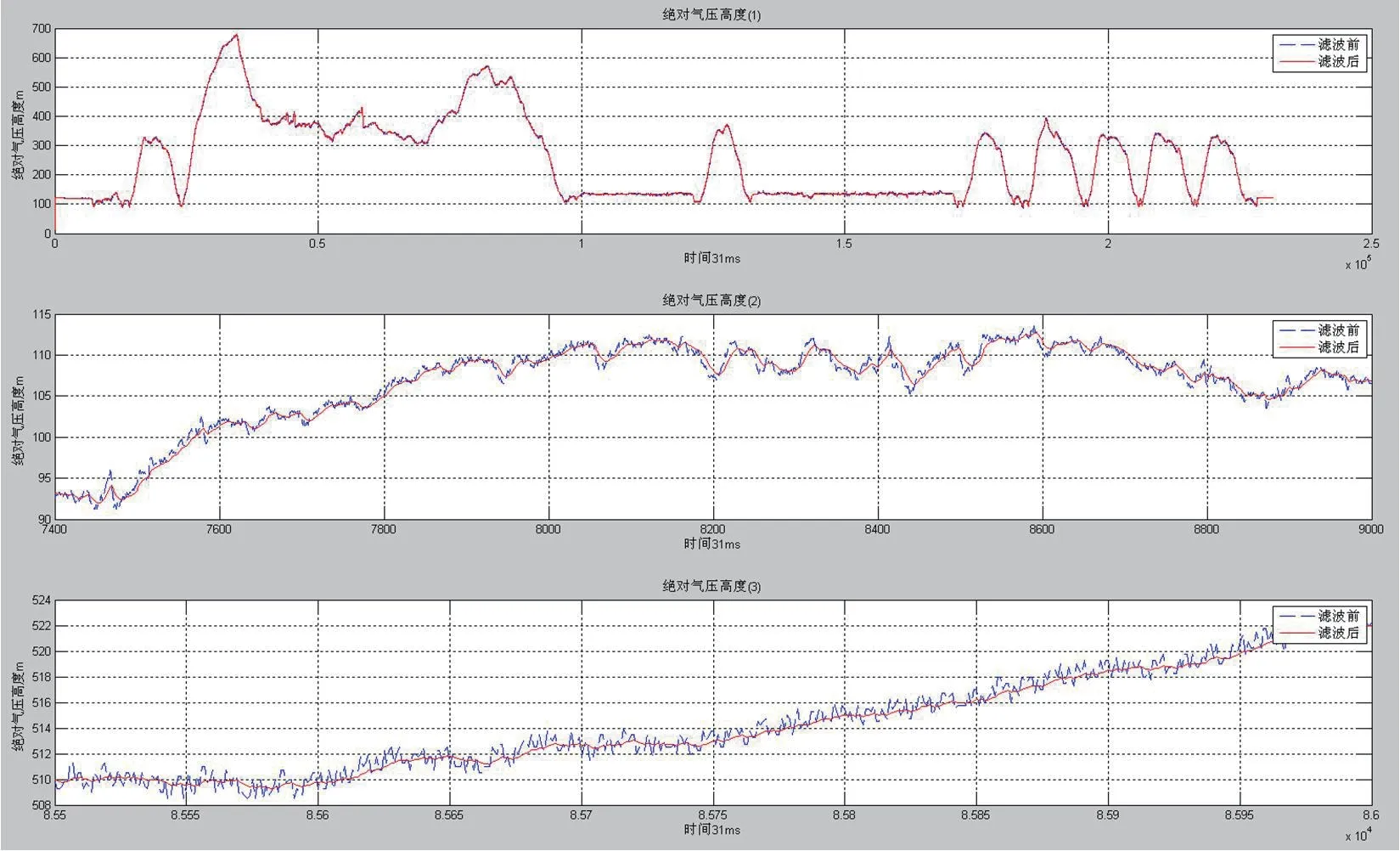
图5:绝对气压高度仿真
无线电罗盘方位角仿真如图6所示,飞参采集的数据共10188 组。子图1 为所有数据滤波前后对比,子图2 为截取时间7500 ~8200(单位:100 毫秒)放大显示,子图3 为截取时间2200 ~3000(单位:100 毫秒)放大显示。从中可以看出,该阻尼处理技术对无线电罗盘数据跟随性很好,不存在相位滞后现象,对于数据跳变起到缓冲作用,能准确滤除尖峰脉冲。

图6:无线电罗盘方位角仿真
4 结束语
文章在限幅滤波法和一阶滞后滤波法基础上,提出基于复合滤波的阻尼处理技术,并将该技术应用到直升机座舱显示系统中。通过飞行参数采集器采集的飞机真实值做大量实验仿真验证,实验结果表明:该技术安全可靠,无需硬件、不存在阻抗匹配,对数据波动、抖动起到明显抑制作用,能有效滤除尖峰脉冲,对阶跃跳变起到缓冲作用,最终使数据显示趋于平滑,实现阻尼效果。
目前该处理技术已应用到直升机上,机上试飞结果表明:该处理技术效果明显,不存在参数瞬间跳变、来回抖动现象,给飞行员带来更好的飞行体验。随着航空电子系统的高速发展,相信该处理技术会得到更广泛的推广和应用。
猜你喜欢
航空维修与工程(2022年11期)2022-02-06
同济大学学报(自然科学版)(2019年2期)2019-04-02
储能科学与技术(2019年2期)2019-03-08
计算机测量与控制(2017年6期)2017-07-01
计算机测量与控制(2017年6期)2017-07-01
电子科技大学学报(2016年2期)2016-08-31
山西化工(2016年6期)2016-04-09
华东师范大学学报(自然科学版)(2014年1期)2014-04-16
电子设计工程(2014年12期)2014-02-27
采矿技术(2011年5期)2011-11-15
