
A Task-Resource Joint Management Model with Intelligent Control for Mission-Aware Dispersed Computing
2021-11-02 07:13ChengchengZhouChaoGongHongwenHuiFuhongLinGuangpingZeng
China Communications 2021年10期
Chengcheng Zhou,Chao Gong,Hongwen Hui,Fuhong Lin,3*,Guangping Zeng,*
1 School of Computer and Communication Engineering,University of Science and Technology Beijing,Beijing 100083,P.R.China
2 Fifteenth Research Institute of China Electronic Science and Technology Group Corporation,Beijing 100083,P.R.China
3 Shunde Graduate School of University of Science and Technology Beijing,Foshan 528399,P.R.China
Abstract:Dispersed computing can link all devices with computing capabilities on a global scale to form a fully decentralized network,which can make full use of idle computing resources.Realizing the overall resource allocation of the dispersed computing system is a significant challenge.In detail,by jointly managing the task requests of external users and the resource allocation of the internal system to achieve dynamic balance,the efficient and stable operation of the system can be guaranteed.In this paper,we first propose a task-resource joint management model,which quantifies the dynamic transformation relationship between the resources consumed by task requests and the resources occupied by the system in dispersed computing.Secondly,to avoid downtime caused by an overload of resources,we introduce intelligent control into the task-resource joint management model.The existence and stability of the positive periodic solution of the model can be obtained by theoretical analysis,which means that the stable operation of dispersed computing can be guaranteed through the intelligent feedback control strategy.Additionally,to improve the system utilization,the task-resource joint management model with bi-directional intelligent control is further explored.Setting control thresholds for the two resources not only reverse restrains the system resource overload,but also carries out positive incentive control when a large number of idle resources appear.The existence and stability of the positive periodic solution of the model are proved theoretically,that is,the model effectively avoids the two extreme cases and ensure the efficient and stable operation of the system.Finally,numerical simulation verifies the correctness and validity of the theoretical results.
Keywords:dispersed computing;computing resource management;intelligent control
I.INTRODUCTION
In an era of rapid information growth,edge/fog computing provides computing,storage,and network bandwidth close to data input or users,alleviating the high latency,network instability and low bandwidth situations that exist under the traditional cloud computing paradigm[1].Although these existing emerging computing paradigms have gradually adapted to the massive data and diverse task processing requirements generated in the Internet of Things(IoT)environment,they still cannot meet the new demand for rapid response to emergencies in specific scenarios.For example,Mosaic Combat systems need to rapidly assemble and rearrange smaller and more diverse military forces to form highly resilient and rapidly killcapable resource networks[2].Accordingly,there is growing research interest in a promising computing paradigm,dispersed computing,which effectively leverages diverse,idle,and geographically dispersed computing capabilities in a collaborative and shared manner to improve mission effectiveness and capability while enhancing threat resilience[3].
The dispersed computing system(see Figure 1)consists of a group of Networked Computation Points(NCPs)and various devices in the physical world,such as servers,base stations,user computers,mobile phones,etc.These points and devices augmented with computing capabilities are connected through heterogeneous inter-NCP overlay network links,forming a resource-centric system[4].In the network,NCPs support mission-aware resource sharing and computing offloading,so that dispersed computing can sense the total resources required by the task/the total task requests(In this paper,the terms total resources required by the task and total task requests are utilized interchangeably,and they refer to the same thing.)in real time and can simultaneously perceive the current resource occupation of the system,which allows the system to balance the resource requirements against the occupancy[4].
From the perspective of users and tasks,missionaware dispersed computing aims to perform computation in the most appropriate and available locations to ensure timely and effective task delivery.However,it is worth noting that severely overloaded tasks in the system will reduce the efficiency of processing tasks or even cause downtime,resulting in prolonged task delivery time and undesirable Quality of Service(QoS).In addition,the presence of large amounts of idle computing resources indicates that system resources are not fully utilized to perform computations,which violates the original design intention of dispersed computing.Thus,to achieve the efficient and stable operation of the dispersed computing system without crashing,it is critical to establish a task-resource joint management architecture(see Figure 1)which takes into account the dynamic transformation relationship between the resource occupancy of the system and the computing resources required by the task.According to the resource occupancy in the system perceived by the dispersed computing,protocol stack with programming capabilities performs the conversion between the resources required by the external task and the available resources of the internal system to form a resource transformation item,which indicates that the task is successfully deployed.At this time,the system once again senses the amount of internal and external resources,and dynamically adjusts the behavior of the system to perform computations through the transformation item.
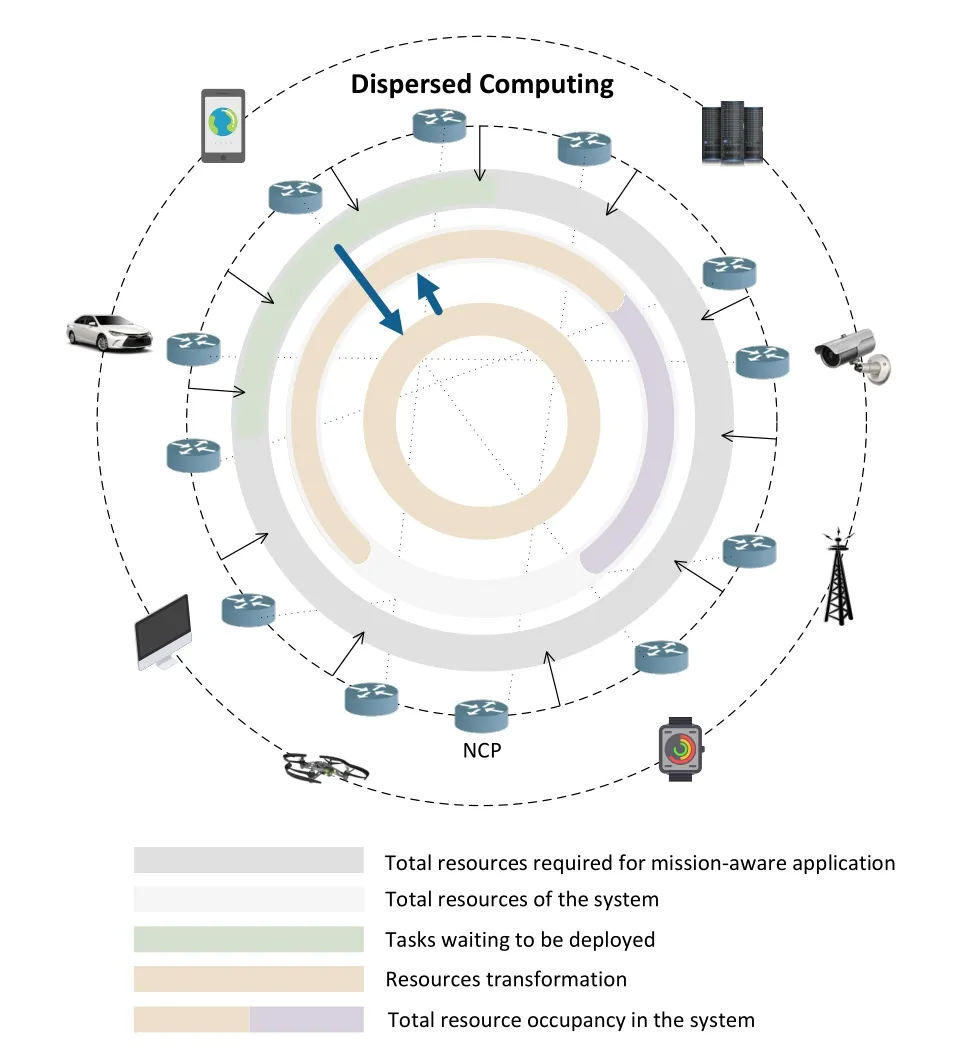
Figure 1.A task-resource joint management architecture for mission-aware dispersed computing.
Based on the above task-resource joint management architecture,this paper aims to quantitatively build the transformation relationship between the resources requested by the task and the resources occupied by the system,and establish a task-resource joint management model with mission awareness and intelligent control in dispersed computing to achieve efficient and stable operation of the system.Our model is related to[5]that the author first used a mathematical model based on differential equations to study the resource allocation of mobile edge computing.However,we develop resource management models for dispersed computing from a macro perspective.
More specifically,we give the model the ability to self-adjust,that is,the model can deny and accept task requests in real time according to the current system resource occupancy,and complete the resource allocation in a desired stable state,thereby introducing an intelligent control strategy.
Intelligent control adopts a state feedback impulsive control strategy to ensure that the solution of the task-resource management model does not exceed the maximum threshold that the system can withstand,so that the system can operate within a feasible or reasonable range.If there is no control over the dispersed computing system,the system’s resources will quickly be exhausted,causing it to lose the ability to accept computing task requests,and the system will collapse.This paper first regards the maximum resource occupancy as the control criterion for system decision-making.Indeed,the task-resource joint management model with intelligent control is conducive to regulating the resource occupancy of dispersed computing system.Beyond that,this paper innovatively implements a bi-directional intelligent control such that performing feedback control on both task requests and resource occupation.Through theoretical analysis of the model and numerical simulations,this control strategy avoids excessive resource pressure in the system and a large number of idle resources caused by no one cares,which not only improves the availability of the system,but also ensures the stability of the system.At the same time,the range of the impulsive thresholds,the impulsive intensity,and the compensation items can be achieved,which is of great significance to the widespread use of the model.In general,two task-resource joint management model with two types of intelligent control(intelligent control and bidirectional intelligent control)is based on the taskresource joint management model without any control.And the model with bidirectional intelligent control is an extension of the model with intelligent control.In general,two task-resource joint management models with two types of intelligent control(intelligent control and bi-directional intelligent control)are based on the task-resource joint management model without any control.And the model with bidirectional intelligent control is an extension of the model with intelligent control.
The main contributions of this paper are summarized as follows:
1)We first implement a task-resource joint management model,which quantitatively analyzes the dynamic transformation relationship between the resources required by the task and the resource occupancy in the system,and establishes a new mathematical method for predicting the trend of the two resources changes in the dispersed computing system.
2)We creatively propose a task-resource joint management model with intelligent control,which has a state feedback capability,that is,the model intelligently selects control strategies based on the mission awareness of dispersed computing.Compared with the traditional fixed-time impulsive control,the control mechanism we proposed can realize real-time interaction with the operating state of the dispersed computing system,which is a process of dynamic feedback.Additionally,this control model solves the problem of inefficiency or downtime caused by excessive resource usage,and ensures the stable operation of the system.
3)We further propose a task-resource joint management model with bi-directional intelligent control,which can simultaneously implement feedback control on the amount of task requests and the resource occupancy in the system.According to the resource occupancy perceived by dispersed computing,the model adopts rejection or incentive strategies,which not only relieves the pressure of resource overload,but also avoids the idleness of resources in the system.The bi-directional intelligent control greatly improves the usability of the system and ensures the efficient and stable operation of the system.
The remainder of this paper is structured as follows:Section II goes over the background related to dispersed computing.Section III establishes and describes the task-resource joint management model with intelligent control for dispersed computing.Section IV carries out stability analysis on the taskresource joint management model with intelligent control.Section V reveals the results of numerical simulation corresponding to our models.In Section VI,our conclusions and future work are presented.
II.BACKGROUND
In this section,we focus on analyzing the differences between dispersed computing and other computing paradigms(e.g.,cloud computing,fog computing,mobile edge computing)to highlight the typical features and the value of dispersed computing.Moreover,a typical application of dispersed computing is given.Finally,some typical and representative resource management efforts for these computing paradigms have to be analyzed.
2.1 Related Computing Paradigms
Cloud computing:The concept of cloud computing was first introduced by Eric Schmidt,CEO of Google,at SES San Jose 2006.Cloud computing is a servicebased computing paradigm in which computing services allow end users to access remote cloud data centers through highly heterogeneous access devices according to their computing needs,and obtain virtualized computing,storage,and communication resources provided by cloud computing providers[6].The service paradigm includes three types,namely software as a service(SaaS),platform as a service(PaaS),and infrastructure as a service(IaaS)[7].Cloud computing plays an important role in expanding the scope and capacity of applications for computing,storage and network infrastructure.However,due to the centralized remote processing model of cloud servers,the processing and storage needs of massive data generated by Internet of Things(IoT)devices and sensors will not be met,and challenges such as response latency,network congestion,and poor quality of service will emerge.
Fog computing:In 2012,Cisco introduced the concept of fog computing,a computing paradigm that enables the extension of cloud services and tasks to the edge of the network close to IoT devices and sensors to address key challenges faced by cloud computing for IoT applications,such as low latency of services,location awareness,and mobility support[8].A typical fog computing architecture is divided into three layers,the user layer and fog layer at the edge network and the cloud layer at the core network[9].User devices are connected to components in the fog layer through heterogeneous links such as Ethernet links,mobile communication network links,and wireless links.The difference from other paradigms is that fog computing provides services and deploys applications that occur on the fog layer between the end-device layer and the cloud data center.The fog layer is composed of clusters of fog nodes that can be connected to each other.The fog nodes are composed of edge servers and smart gateways with computation and storage capabilities,etc.Due to the variability of service capabilities of different fog nodes and different network environments,fog resource management and computation offloading needs to be done by the cloud,which means that fog computing is not an independent computing paradigm and needs to interact with the cloud to achieve consistent management functions[10].
Mobile edge computing(MEC):In 2014,the European Telecommunications Standards Institute(ETSI)standardized MEC as providing computing,storage,and communication services and resources to mobile end users at the edge of mobile networks and within radio access networks(RAN)[11].MEC is a computing paradigm related to edge computing and is an extension of fog computing.Similar to the concept of fog computing,the most commonly studied MEC system architecture is also divided into three layers[12].The difference is that the fog computing environment has extensive peer-to-peer interconnection between fog nodes in the fog layer,while MEC is intelligently processed in“silos”,which enhances its performance in a machine-to-machine environment.Moreover,this network isolation feature makes MEC less vulnerable to attacks[13,14].Since the intelligent processing and communication capabilities of MEC are concentrated in the RAN,MEC places more emphasis on the combination of mobile communication technologies and edge computing,which is a rising trend in 4G and 5G networks.
Dispersed computing:In 2016,the Information Innovation Office(I2O)of the U.S.Department of Defense Advanced Research Projects Agency(DARPA)proposed a fully decentralized computing architecture:dispersed computing,which can connect all geographically dispersed computing platforms into a network organism,i.e.,empowering the network into a cloud.When a large number of tasks are requested,dispersed computing can evolve the relevant network devices from data transmission nodes to readily available computing resources,constituting wired and wireless network links with heterogeneous inter-NCP coverage.By partitioning tasks based on the amount of resources in the system,NCPs are able to provide services to users in a collaborative and shared manner on a global scale.
Compared with computing paradigms such as cloud computing,MEC and fog computing,dispersed computing has the following features and advantages[4,15]:
·Support for computational task awareness:Designed dispersed task-aware algorithms empower the potential of task awareness in dispersed computing.Based on the shared task details,data flow details,the amount of resources required by the task,the amount of system resources,etc.,various computing resources in the heterogeneous network are invoked at the most appropriate location for collaborative computing from the perspective of the user and the specific task.
·Support for programmability:Dispersed computing develops NCPs and protocol stacks with programming capabilities.According to the network load,dispersed computing achieves the streamlining of computing tasks and resource allocation of applications through operations such as dynamic modification of logical protocols to reduce the computing load and throughput in the network.
·Respond to network dynamics:Through automatic adaptation of relevant protocols,dispersed computing has the ability to efficiently and dynamically respond to unpredictable and frequently fluctuating network connections and networks with rapidly changing topologies.
·Support for heterogeneous computing platforms:Dispersed computing is able to integrate numerous idle and available heterogeneous computing platforms for collective computing task allocation and management.Heterogeneous computing platforms refer to various network components,mobile devices,and portable micro-clouds,which have a programmable execution environment.
As mentioned above,the efficiency and high scalability of dispersed computing are more conducive to cope with dynamically changing task processing and unreliable network environments,making dispersed computing useful in practical scenarios such as military operations and disaster emergency relief.DARPA believes that dispersed computing will be an enabling technology for the U.S.Army[16].
In addition,we compare and analyze the differences between the architectures of the four computing paradigms,as shown in Figure 2.The computing architecture of dispersed computing is significantly different from that of the existing computing paradigms.While fog computing and MEC computing architectures are based on a three-tier structure containing cloud data centers,dispersed computing considers each computing device(or each NCP)to be of equal status,with no obvious hierarchical structure and in a fully distributed manner.
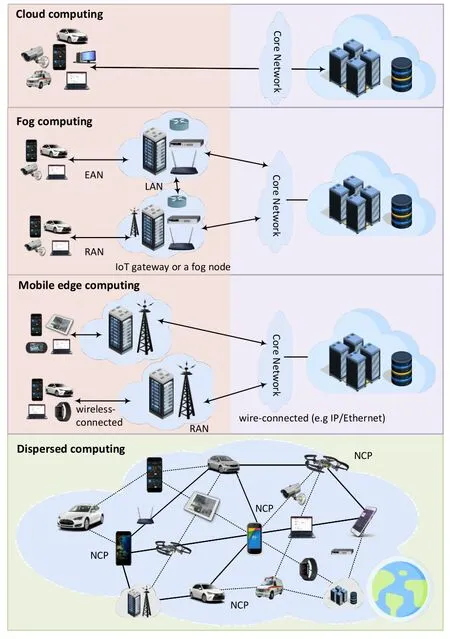
Figure 2.The differences between the architectures of cloud computing,fog computing,MEC and dispersed computing[10].
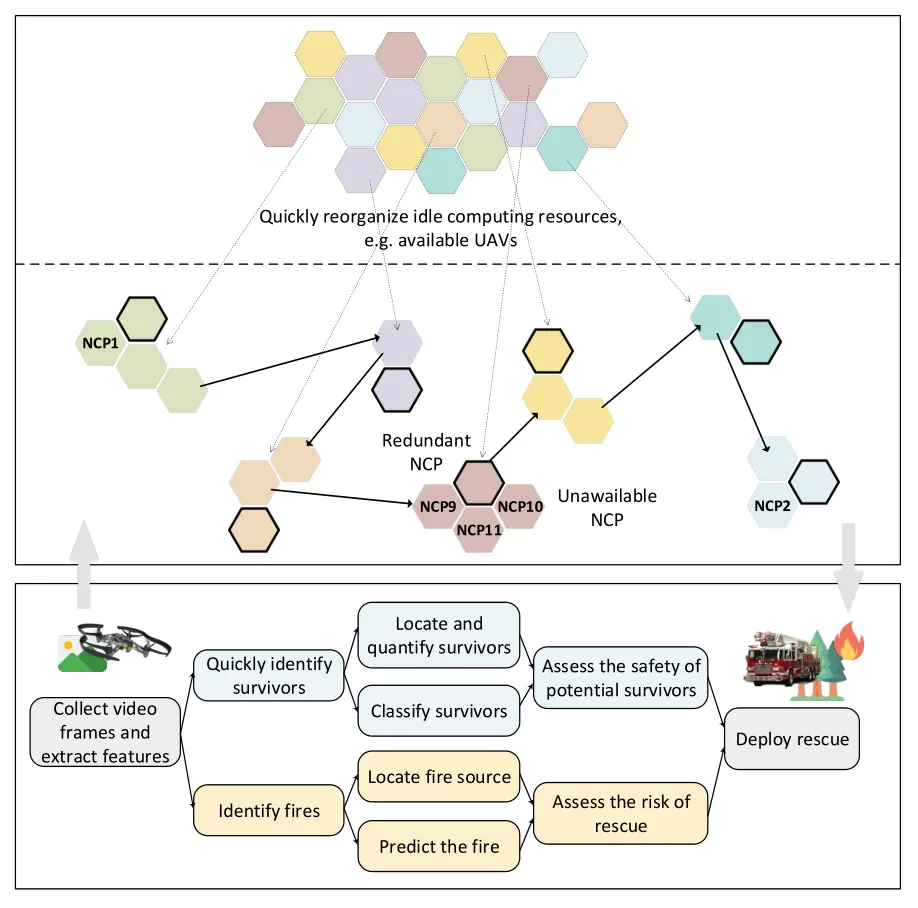
Figure 3.Dispersed computing in fire rescue[4].
2.2 A Typical Application of Dispersed Computing
We consider the application of dispersed computing to a forest fire rescue scenario.In the fire rescue scenario,the UAV operator flies the UAV over the entire forest,and the UAV acts as a data source generator to continuously collect forest video frames and extract features.Through image recognition,prediction and localization techniques,the safety of potential survivors is assessed and rescue risks are evaluated to rationalize and deploy forest fire rescue.A great deal of intelligent computing will occur,but fire rescue is a highly dynamic and complex environment.Large areas of forest are often located at the edge of cities and in remote locations where the computing infrastructure cannot be used directly for intelligent computing.In addition,the energy storage of UAV is needed for flight and cannot meet the intensive computing as well as communication needs.In the event of a fire,network connectivity is frequently fluctuating;the network topology will change rapidly and unpredictably.
Considering the characteristics and advantages of dispersed computing,Figure 3 illustrates the application of dispersed computing in fire rescue.The UAV sends the extracted video frames to the dispersed computing network(shown by the network consisting of multiple NCPs in the top half of Figure 3),and the dispersed computing system performs a number of tasks(shown by the bottom half of Figure 3).Specifically,NCPs have the ability to communicate with each other,and different NCPs will be deployed with different subtasks.For example,the three NCPs,NCP 9,NCP 10 and NCP 11,are assigned the subtask of fire source localization.The failure resilience mechanism is reflected in the fact that once the NCP 10 becomes unavailable,through data routing,the redundent NPC throws the ability to complete the locating task.More generally,redundant NCPs(shown by the hexagons with black edge)are always ready for the execution of each subtask.Eventually,NCP 2 aggregates the computed results of all NCPs and performs the arrangement and deployment of the rescue strategy.
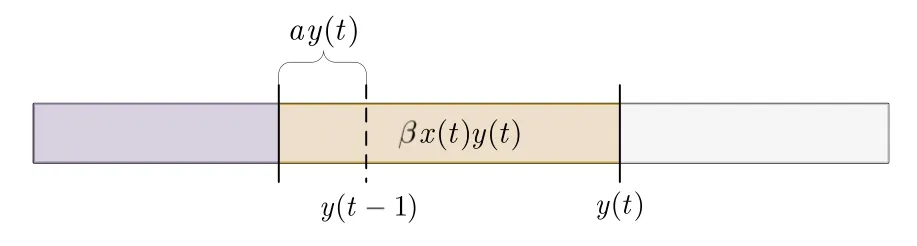
Figure 4.Visualization for model(1).
One conclusion that can be drawn from this application is that dispersed computing has the advantage of flexibility and scalability in dealing with highly dynamic and heterogeneous network environments.Whereas,computing paradigms such as cloud computing,fog computing,edge computing,MEC,etc.are often based on the assumption of static algorithms as well as stable network situations that do not demonstrate their value in such applications.In addition,dispersed computing can make the best use of idle computing resources in the most appropriate location from a task perspective.
2.3 Resource Management for Related Computing Paradigms
Dispersed computing is a derivative computing paradigm of fog computing and MEC.Research on computing resource management for dispersed computing should investigate existing resource management strategies for fog computing and MEC.The key concept of fog computing and MEC is to decentralize the available resources in the cloud data center to the network edges closer to end users and sensing devices[17].Despite the resource-constrained,heterogeneous and dynamic properties of fog and edge resources,there have been many state-of-art algorithms and models supporting fog computing and MEC resource management[18].Dinhet al.[19]proposed an algorithm for the computing resource and task allocation for a single mobile device,which can dynamically adjust the CPU frequency to simultaneously optimize task execution time and energy consumption.Chenet al.[20]proposed a resource-efficient computing offloading model and a joint resource allocation mechanism for users and network providers respectively,which aims at the joint management of multiple resources.Wanget al.[21]proposed a wireless powered system that minimizes total energy consumption,taking into account the limitation of personal computing delay.Chenet al.[22]used software-defined networks for reference,and designed task offloading and computing resource allocation mechanisms with the shortest average delay as the optimization goal,considering the battery energy of terminal device as constraints.Zhanget al.[23]studied an innovative iterative search algorithm that weighs energy consumption and delay to jointly optimize communication and computing resource allocation.Duet al.[24]considered the computing environment of fog and cloud cooperation,and jointly managed offloading strategies and computing resources,transmit power and radio bandwidth to ensure user fairness and allowable delay.Zhaoet al.[25]proposed a resource management and allocation method that minimizes the total energy consumption of mobile devices on the premise of deadlines.Although dispersed computing is very different from computing paradigms such as fog computing and MEC in terms of concepts,system architectures,and applications,we can still borrow research ideas on resource management for dispersed computing from existing studies.
Compared with fog computing and MEC,dispersed computing links all available computing resources worldwide,including cloud data centers and microcomputing centers,into the network,which manages resources in a cooperative and shared manner.Unlike resource management in MEC,it is clear from the features and advantages of dispersed computing that dispersed systems are built on a set of protocol standards that can leverage the programmability of the protocol stack to achieve dynamic management of dispersed resources,which alleviates the design constraints in today’s communication networks.In particular,dispersed computing has unique task-aware and dynamic network-aware properties.Huet al.[26]designed a throughput-optimized mission scheduler for continuous and stable input signals,in which two key technologies,task replication and task segmentation,are considered,which are used to avoid low-bandwidth links and balance the load respectively.Ghoshet al.[15]abstracted the computational mission into a Directed Acyclic Graph,and distributed the execution of the graph to a network of geographically dispersed computing nodes.Rahimzadehet al.[27]proposed polynomial-time task allocation and resource allocation algorithms for stream processing applications in dispersed computing,which improves the task processing rate and achieves the required Quality of Experience(QoE).Considering the communication cost in resource organization and task allocation,Yanget al.[28]proposed a broadcast-based virtual queuing network and proved that the proposed scheduling strategy can achieve the optimal throughput.None of the above task scheduling and resource management algorithms take advantage of the mission awareness of NCPs in dispersed computing networks.In terms of system architecture,Schurgotet al.[4]described dispersed computing as a resource-centric system architecture that combines computing and communication resource management,using the diversity of NCPs and the heterogeneity of links to achieve cross-hierarchy interaction between mission-aware computing layer and programmable nodes and protocol stack.Yanget al.[16]discussed the advantages of dispersed computing in future wars and proposed a novel dispersed computing architecture for the battlefield.It can be seen that the exploration and research on dispersed computing is still in its infancy.There are few works that have been studied for resource management of dispersed computing,especially the joint management of tasks and resources.Specifically,in dispersed computing,the joint management of tasks and resources is challenging,and the technical bottleneck of ensuring that the dispersed computing system has enough idle and available resources to satisfy all users’ task requests to achieve a stable operation state is a concern of our research.In particular,we take inspiration from mission-aware property that can determine when and how applications and tasks move between NCPs to achieve dynamic resource management.
III.A TASK-RESOURCE JOINT MANAGEMENT MODEL FOR DISPERSED COMPUTING
Dispersed computing is a new resource-centric system architecture.From the perspective of users and tasks,it can complete tasks within the deadline specified by users to ensure the QoS.It is necessary to jointly manage the overall task request and resource allocation of the system.Particularly,when the resources required by the task are greater than the resource thresholds that the system can provide,the system will delay task processing,or even crash.Thus,in view of a missionaware characteristic,when the task’s resource demand is close to the threshold,the dispersed computing system should be empowered to reject the task.On the contrary,when the system has a large amount of idle resources,the system can adopt incentive strategies to accept tasks,which can improve the availability of the system.
In this section,it is of great significance to study the dynamic transformation relationship between the resources required by all tasks and the total resource occupancy in dispersed computing(see Fig.1),and to establish an appropriate task-resource joint management model.
3.1 Establishing a Task-resource Joint Management Model
Inspired by neural networks derived from biology,we consider that the transformation relationship between the resources consumed by task requests and the resources occupied by the system in dispersed computing is similar to the transformation between healthy cells and infected cells in epidemiology.Thus,we first establish the following task-resource joint management model of dispersed computing based on the earliest and simplest classical virus dynamics model[29]:
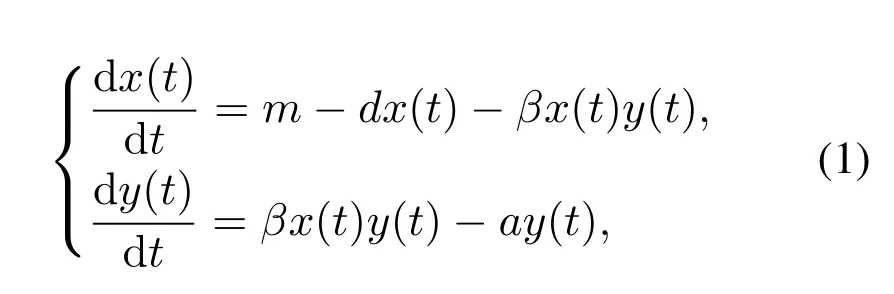
wherex(t)represents resources required for missionaware applications andy(t)represents resources occupied by the system.Resourcesx(t)required for the task are generated at a constant ratemanddx(t)means that the resource requirements will not be unlimited.βx(t)y(t)indicates that the task is successfully assigned,andais a completion rate of the task.Figure 4 visualizes the model(1).
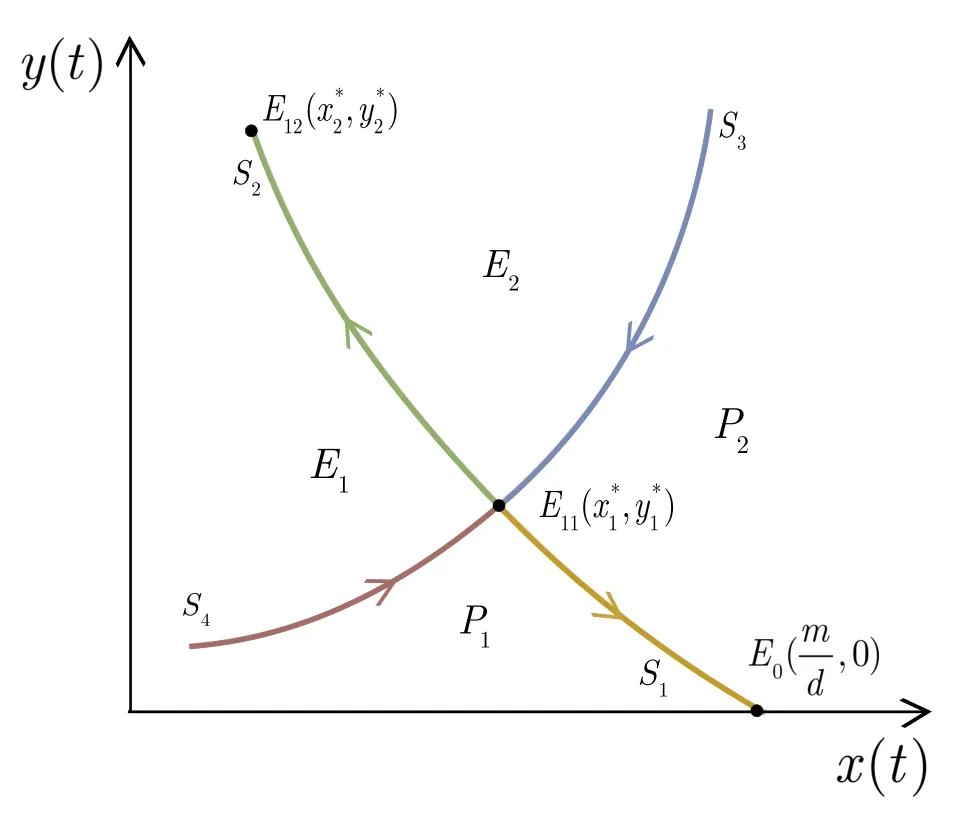
Figure 5.The trajectories of model(3).
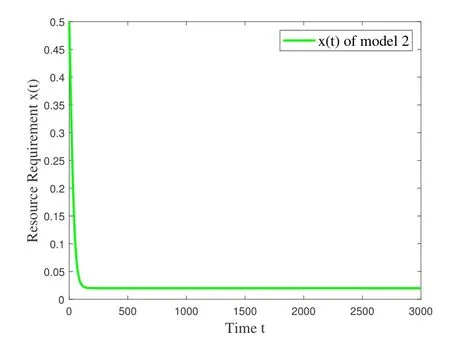
Figure 6.State trajectory of the resources x(t)required by tasks in model(2).
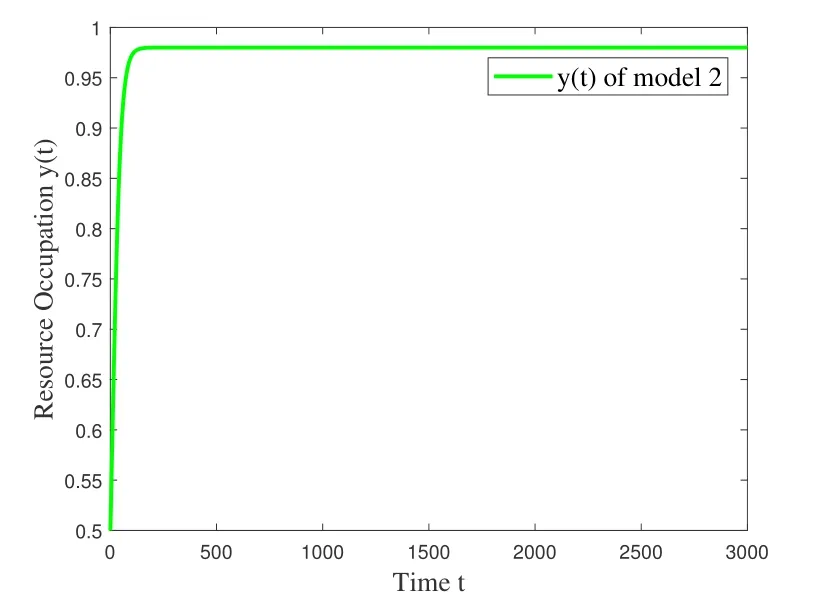
Figure 7.State trajectory of the resource occupation y(t)in model(2).
Notice that the resource transformation rateβis a constant in model(1).However,according to the properties of the network system resource to complete the task,the resource transformation rate is usually an increasing function of the resource occupation.A nonlinear resource transformation rateβ(y)is considered,whereβis a function of the resource occupancyy.Furthermore,the smaller theyis,the stronger the task conversion capability of the system is,and the faster theβwill grow.Conversely,the larger theyis,the lower the task conversion efficiency of the system is,and the slower the growth ofβis.In other words,the growth curve ofβwithyfollows a logarithmic curve.In this paper,we use the functionto approximate the resource transformation rateβ(y)that is consistent with the form in[30].Thus,the model(1)is converted into(see[30])
The equilibrium,the stability of the equilibrium,and the dynamics behavior of model(2)have been fully studied in[30],which is the basis of our innovation.Therefore,ensuring completeness of further study,the main conclusions in[30]are given by the following lemma.
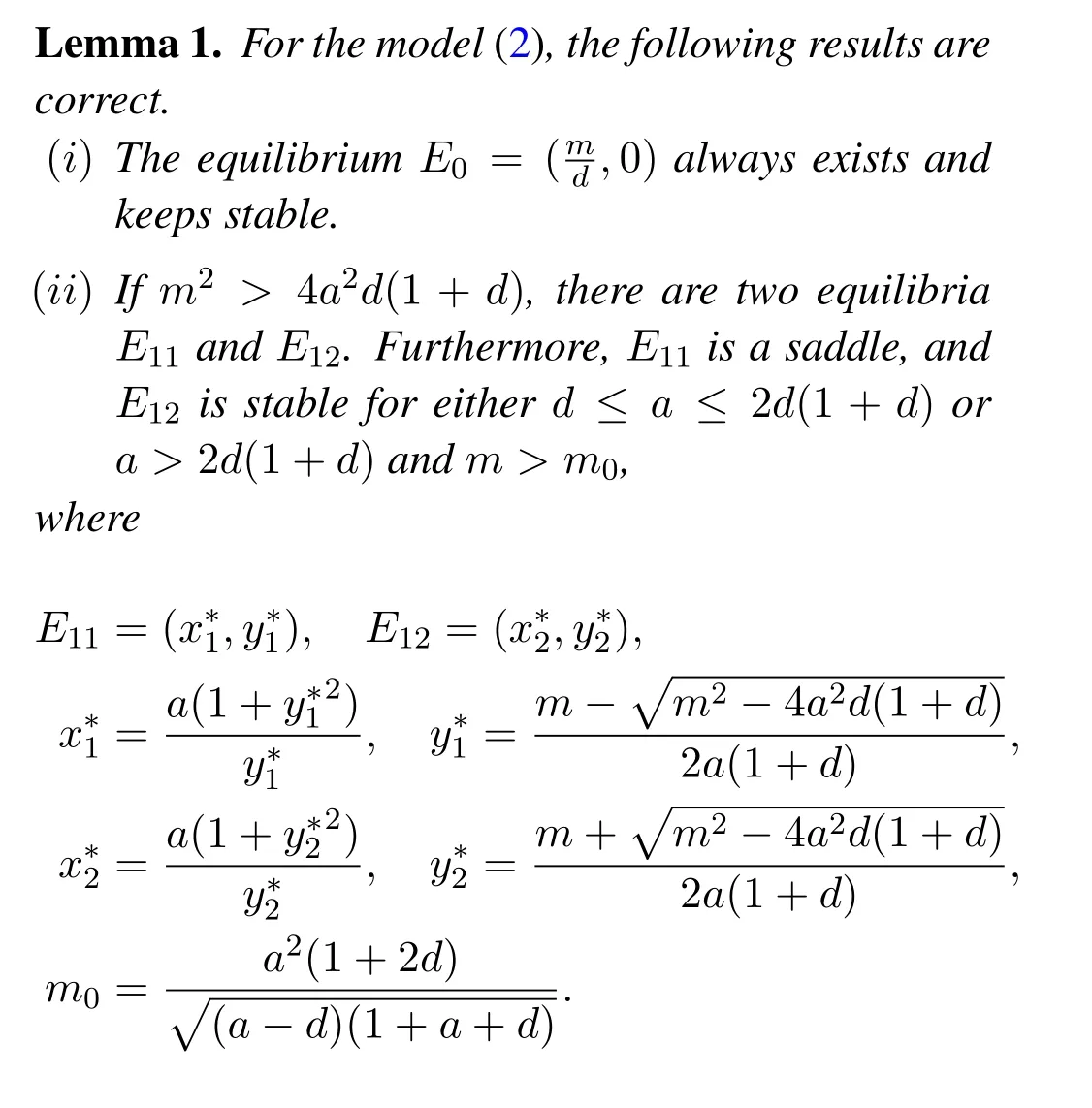
Whenm2= 4a2d(1+d),there is a degenerate singular pointE1that complex dynamic behaviors may occur,which is beyond our attention(see[30]and the reference therein).We assume that conditions of Lemma 1 have been satisfied throughout this paper.
3.2 Establishing a Task-resource Joint Management Model with Intelligent Control
In the following,we mainly discuss the impulsive control of model(2),whereE11is a saddle andE12is stable.However,the dynamic state reached by the model is not the ideal state of task-resource joint management in dispersed computing.It is expected to greatly improve the overall performance of the system and ensure the stable operation of the system by taking advantages of mission awareness and the introduction of an intelligent control strategy.Basically,the operation of the system can perceive external task requests through mission-aware technology with intelligent adjustment strategies.Compared with the deterministic model(2),we enable the model to intelligently adjust its own strategy.Obviously,the model(2)does not have this ability.Once the model is established and its parameters are determined,its dynamic behavior is an inherent property of the model and cannot be changed.
Accordingly,intelligent control(i.e.,state feedback control strategies)based on the model(2)is introduced.The traditional fixed-time impulse means that the solution of the model is appropriately intervened in the fixed time sequencetk(k ∈N+).Although this method can correct the final state of the model to a certain extent,it is also a rigid and mechanical control method,which cannot achieve a desired effect.State feedback control strategies are interpreted as adopting reversed impulsive control when the solution of the model reaches a certain threshold.Generally,this threshold is the maximum upper bound of normal or stable system operation.Once this threshold is exceeded,the system performance will be adversely affected.
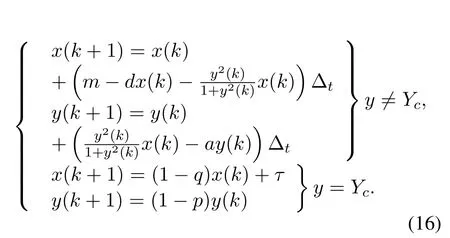
In this paper,we put forward,firstly,an innovative task-resource joint management model with state feedback control strategies,while regarding the maximum resource occupation as control threshold.The intelligent control model is introduced by the following state feedback impulsive differential equation:
where,p,q ∈(0,1)represent intensity of impulsive control andYcis set as the threshold of maximum resource occupation to ensure that the system does not go down.In addition,τrepresents a compensation item for a rejection of a system-level or underlying task.Intelligent control emphasizes that the development trend of control strategies and model solutions is a feedback process.When the resource occupancy is less than the thresholdYc,the system implements task-resource management according to the first two equations of model(3).On the other hand,when the resource occupancy reaches the thresholdYc,the system implements instantaneous control according to the impulsive control strategy set by the last two equations of model(3).
Compared with model(2),the advancement of model(3)is embodied in that the intelligent control function of model(3)avoids system inefficiency or even downtime caused by resource occupation exceeding the threshold.We notice that the control of model(3)can instantly release the occupied resourcespy(t),and deny part of resource requestsqx(t)for the task.This will cause an adverse effect,that is,the amount of task request will decrease,even if a compensationτis applied during each impulsive control.
3.3 Establishing a Task-resource Joint Management Model with Bi-directional Intelligent Control
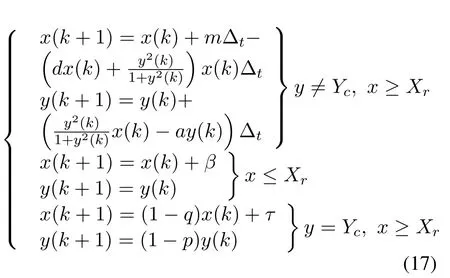
On the basis of model(3),we further propose a taskresource joint management model with bi-directional intelligent control as follows:
whereXris a minimum threshold to ensure that the system is not deactivated.When the density of resourcesx(t)required for the task is less thanXr,x(t)is supplement withγand then reaches the levelx(t)+γ.Ifx(t)still keeps less thanXr,x(t)is supplement withγagain and its density reaches the levelx(t)+2γ.Similarly,the renewal process is dynamically repeatedntimes.When the resourcesx(t)required for the task reach the levelx(t)=Xr,the supplement is stopped.Then,we begin to consider the control of they(t).
The advantage of model(4)is to consider the availability of the dispersed computing system more comprehensively and to maximize the performance of the system.Model(4)first judges the amount of requested resources.When the amount of task requests is lower than a certain threshold,the dispersed computing system has a large amount of idle resources.Nevertheless,making full use of idle resources in the network to provide users with high-quality services is consistent with the design of resource-centric architecture in dispersed computing.The control terms of the fourth and fifth equations of model(4)avoid resource idleness.The significance of the bi-directional intelligent control is highlighted that the model performs feedback control on both the amount of task request and resource occupancy.The system not only reverses the excessive resource occupancy,but also corrects the situation where fewer users request computing resources,which demonstrates the ability to control the two extreme cases.Model(4)is more reasonable than model(3),but model(3)is the basis of model(4).
In the fowlloing,the dynamic behaviour of taskresource joint management models(3)and(4)will be fully analyzed.
IV.STABILITY ANALYSIS OF MODEL(3)AND MODEL(4)
In this section,the stability and dynamic behaviour of task-resource joint management models(3)and(4)with control strategies will be discussed.The purpose is to analyze whether the solution of the models is orbitally asymptotically stable with a certain range of impulsive factors,so as to further prove whether the models can achieve an ideal stable state in terms of task-resource allocation and management.
Firstly,related definitions and lemmas need to be enumerated to assist in the stability analysis of the models(3)and(4).
The X-isoline of model(2)is denoted as
and the Y-isoline of model(2)is denoted as

4.1 Stability Analysis of Model(3)
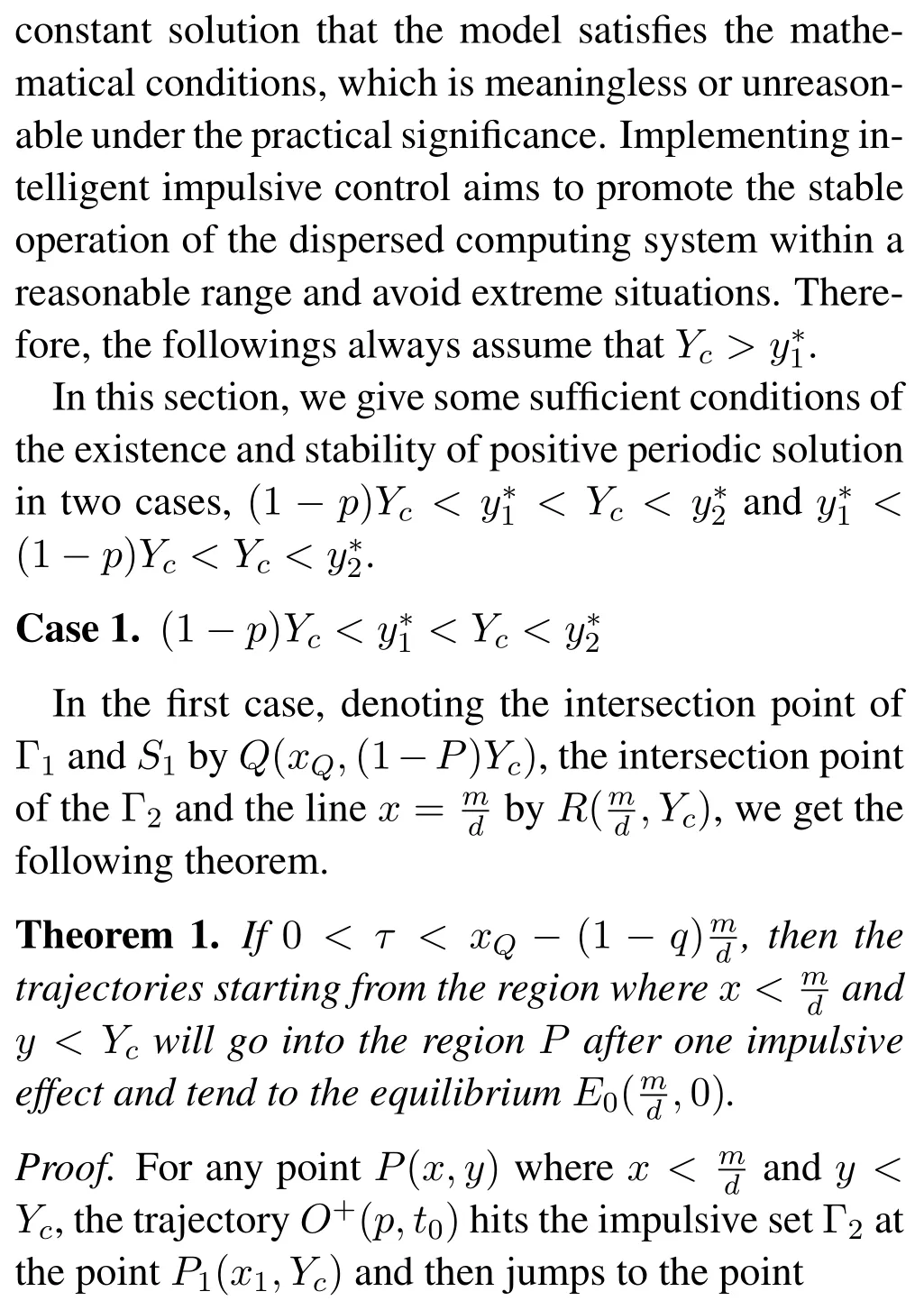
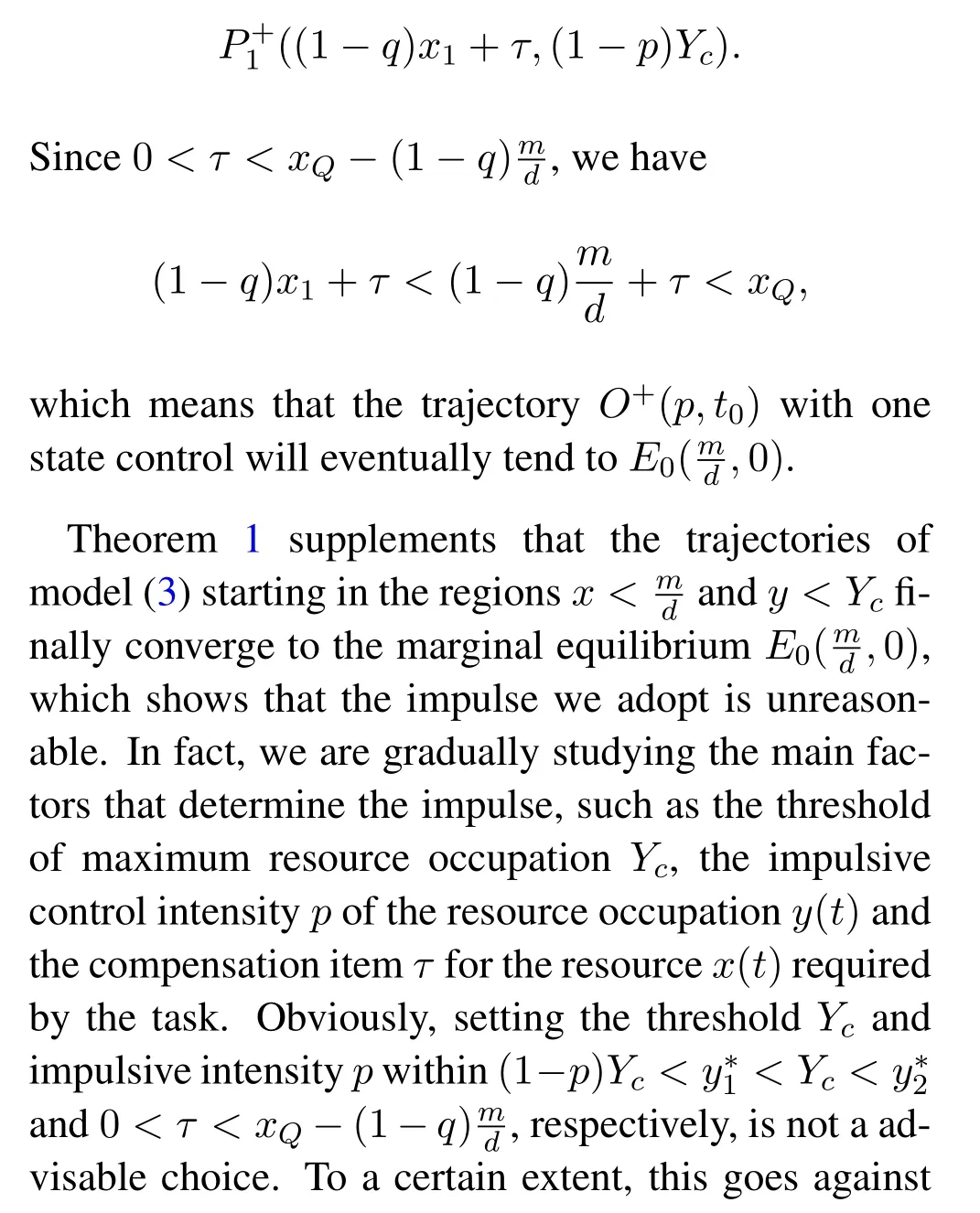
Theorem 2 obtains the range of the impulsive thresholdYc,the impulsive intensityp,and the compensation itemτof the intelligent control model(3)with a positive order-1 periodic solution.The positive periodic solution means that the dispersed computing system can operate normally through intelligent feedback control under the task-resource joint management model we established.The limits of system operation,the maximum amount of tasks that can be accepted and the occupancy of system resources,are determined by the periodic solution,which is intuitively presented in numerical simulation.
In the following,we will discuss the stability conditions of the periodic solution.
According to Lemma 2,we know that the order-1 periodic solution(φ(t),ψ(t))of model(3)is orbitally asymptotically stable.
Applying the Analog ofPoincar´ecriterion,Theorem 3 proves that order-1 periodic solution of model(3)is orbitally asymptotically stable.Stability is of practical significance to any physical system such that the dispersed computing system can operate stably,and the solution of the model will converge to a fixed periodic solution with regularity.As analyzed in Section III,this periodic solution is not the most ideal operating state for dispersed computing.The problem is that the establishment of the impulse mechanism focuses on the occupancy of resource allocation and ignores the inefficiency of the system triggered by the rejection of task requests,which cannot take advantage of the dispersed computing.Thus,based on model(3),we establish model(4).In the next section,we will focus on analyzing the dynamic behavior of model(4).
4.2 Stability Analysis of Model(4)
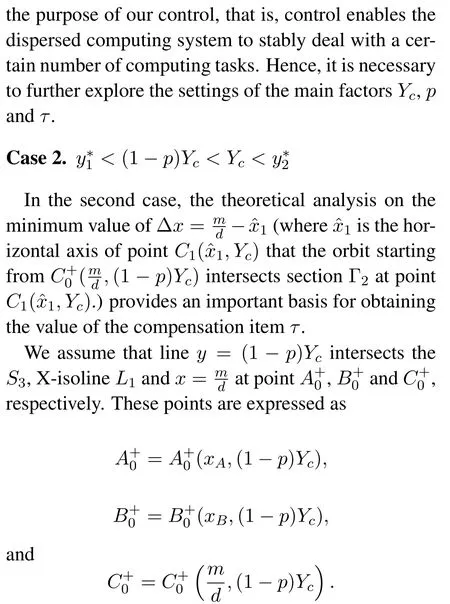
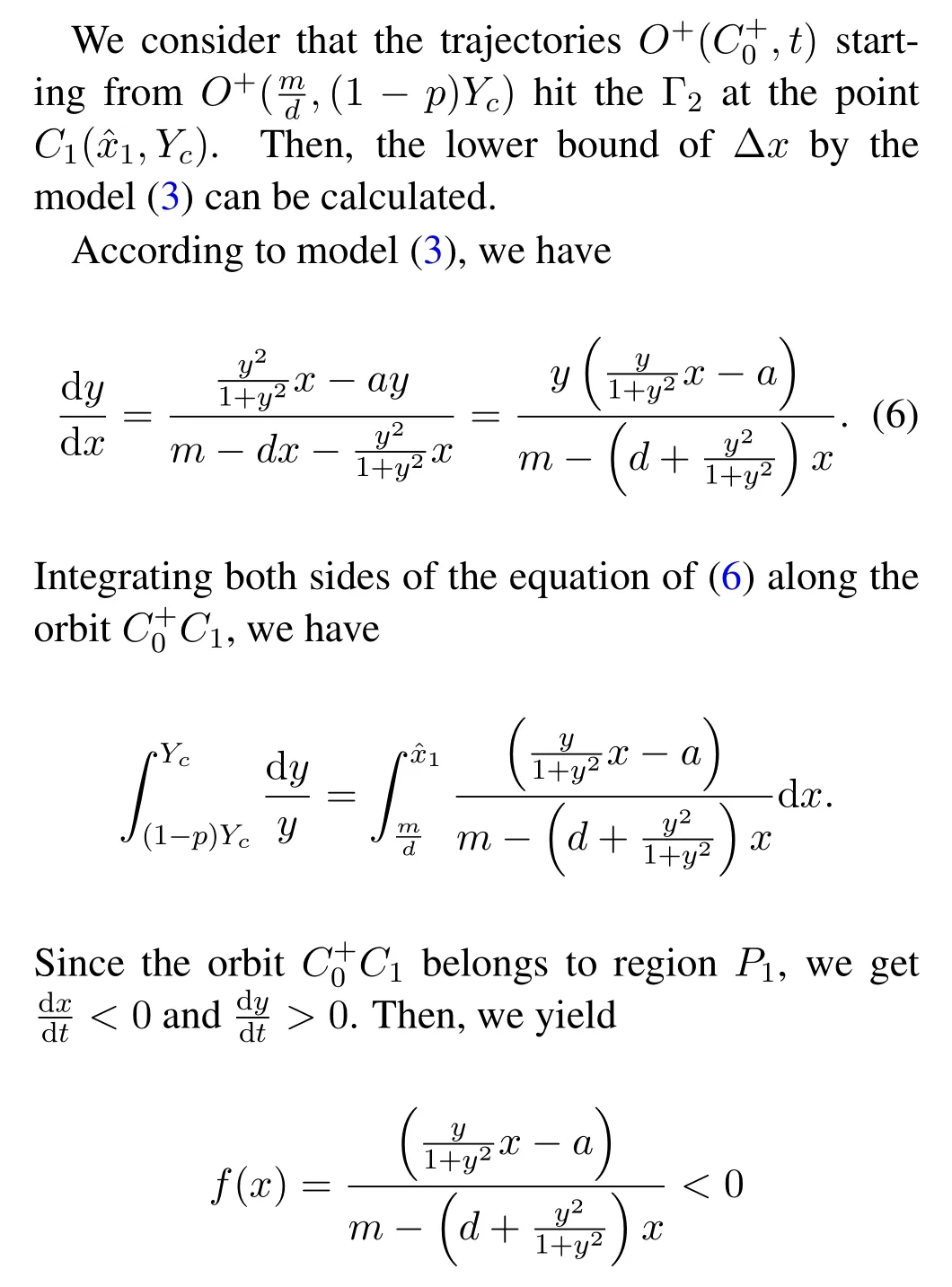
Compared with model(3),model(4)is more realistic.Therefore,it is reasonable that we assumeXr <xA.Becausex(t)increases too much for the state feedback control strategies,the control strengthsp,qandτare invalid and wasteful.Similarly,we need to determine the main impulsive control factors:thresholdsYcandXr,impulsive intensitypandq,and compensation termsγandτ.According to the analysis of model(3),we study the trend of the trajectory under the conditiony1<(1-p)Yc <Yc <y2of Case 2,thereby determining the impulsive intensityptoy(t)and the thresholdYc.Sinceγis a mechanical,continuous,and instantaneous supplement tox(t),there is no need to restrictγ.In addition,q ∈(0,1),γandτjointly limitx(t),which plays a complementary role.In the following conclusion,we will explore the range ofτ.
Remark 1.In the case of x0<x1,we can know that the trajectory of order-1 periodic moves from left to right with the parameter τ increasing and the order-1 periodic solution tends to the separatrice S2.
Remark 2.In the case of x0>x1,we can know thatthe trajectory of order-1 periodic moves from right to left with the parameter τ decreasing and the order-1 periodic solution tends to the separatrice S3.
Theorem 4 proves that order-1 periodic solution of model(4)is orbitally asymptotically stable.Compared with model(3),model(4)enables the system to reach an ideal stable state considering both resource availability and resources required by computing tasks.That is to say,the impulse mechanism can maximize the utilization of resources in the dispersed computing system,so as to avoid idle resources and system downtime.
In summary,the task-resource joint management mechanism established in model(4)can not only monitor and quantitatively describe the dynamic changes ofy(t)andx(t)in real time,but also perform bidirectional intelligent control of the dispersed computing system.This guarantees the stable operation of the system while improving the overall utilization efficiency and performance of the system.This work provides a feasible solution for the overall resource allocation of the dispersed computing system.
V.NUMERICAL SIMULATION
To verify the effect of the model proposed in this paper on the task-resource joint management of dispersed computing,we use MATLAB software to perform numerical simulations on the three models.
First,we discretize the uncontrolled model(2)to get
We set the initial state of the model asx(0)= 0.5,y(0)= 0.5,and take the parametersm= 0.01,d= 0.01 anda= 0.01 to get the state trajectory of the required resourcesx(t)for the task of model(2)as shown in Figure 6.We can see that without impulsive control,the task requests acceptable to dispersed computing are rapidly decreasing.And at the relative time oft= 150,97.5%of task requests are rejected.At this time,dispersed computing has lost computing power.
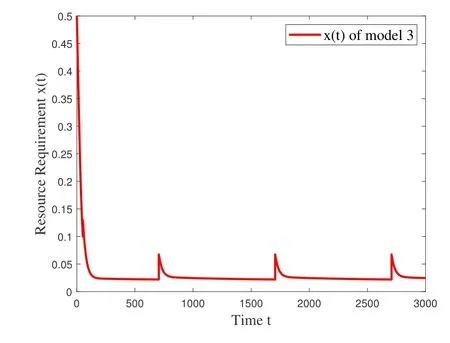
Figure 8.State trajectory of the resources x(t)required by tasks in model(3).
At the same time,the state trajectory of the system’s occupied resourcesy(t)is shown in Figure 7.We can see that without impulsive control,system resources are quickly exhausted.At this time,the dispersed computing system has collapsed and the system is unavailable.
Then,we discretize a singleycontrolled model(3)to obtain
We set the initial state of model(3)asx(0)= 0.5 andy(0)= 0.5,and take the parametersm= 0.01,d= 0.01,a= 0.01,p= 0.2,q= 0.2,τ= 0.05 andYc=0.9 to obtain the state trajectory of the resourcesx(t)required for the task of model(3)as shown in Figure 8.Notice that the values of these parameters meet the conditions given in Case 2 and Theorem 2 in the stability analysis of model(3).We can see that under a single impulsive control ony(t),the ability of dispersed computing to accept task requests can be periodically restored.However,this model has little effect on the task allocation ability of dispersed computing.At this time,the task-resource management module of dispersed computing is still on the verge of failure.
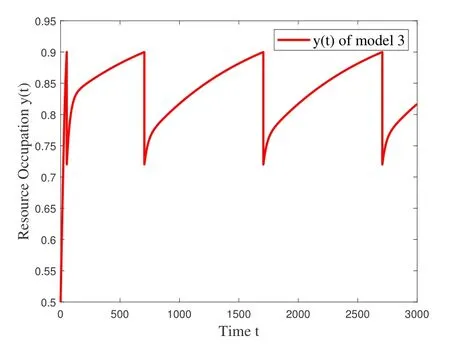
Figure 9.State trajectory of the resource occupation y(t)in model(3).
At the same time,the state trajectory of the system’s occupied resourcesy(t)is shown in Figure 9.We can see that under a single impulsive control ony(t),the pressure on system computing resources is alleviated.At this time,the resource occupation of the dispersed computing system is controlled within a feasible range,and the resource system maintains stable operation.
Finally,we discretize the model(4),wherexandyare simultaneously controlled,to obtain
We set the initial state of model(4)asx(0)= 0.5 andy(0)= 0.5,and take the parametersm= 0.01,d= 0.01,a= 0.01,p= 0.2,q= 0.2,τ= 0.05 andYc= 0.9,β= 0.3 andXr= 0.1 to achieve the state trajectory of the resourcesx(t)required for the task of model(4)as shown in Figure 10.Notice that the values of these parameters meet the conditions given in Theorem 4 in the stability analysis of model(4).We can see that when impulsive control is applied to bothx(t)andy(t),the ability of dispersed computing to accept task requests remains within a reasonable space.At this time,the task-resource management module of dispersed computing can maintain stable operation.
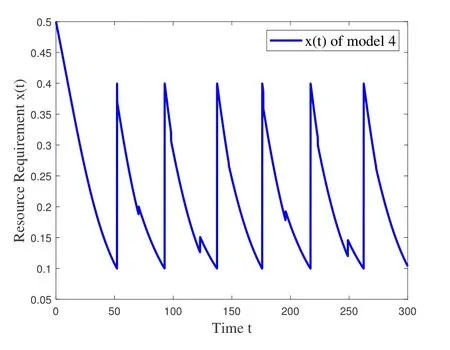
Figure 10.State trajectory of the resources x(t) required by tasks in model(4).
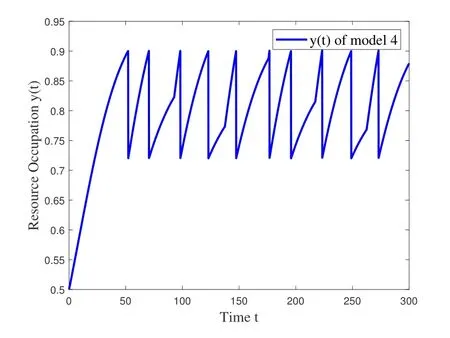
Figure 11.State trajectory of the resource occupation y(t)in model(4).
At the same time,the state trajectory of the system’s occupied resourcesy(t)is shown in Figure 11.We can see that under a single impulsive control ony(t),the pressure on system’s computing resources is alleviated.At this time,the resource occupation of the dispersed computing system is controlled within a feasible range,and the resource system maintains stable operation.
Furthermore,Figure 12 in three-dimensional space is a stable periodic solution of model(4),which shows more intuitively the bi-directional property of model(4)in terms of control mechanism,i.e.,the rejection or incentive feedback control strategy of model(4)can act on both task requestsx(t)and resource occupancyy(t)to ensure stable operation of the dispersed computing system while maximizing system resource utilization.
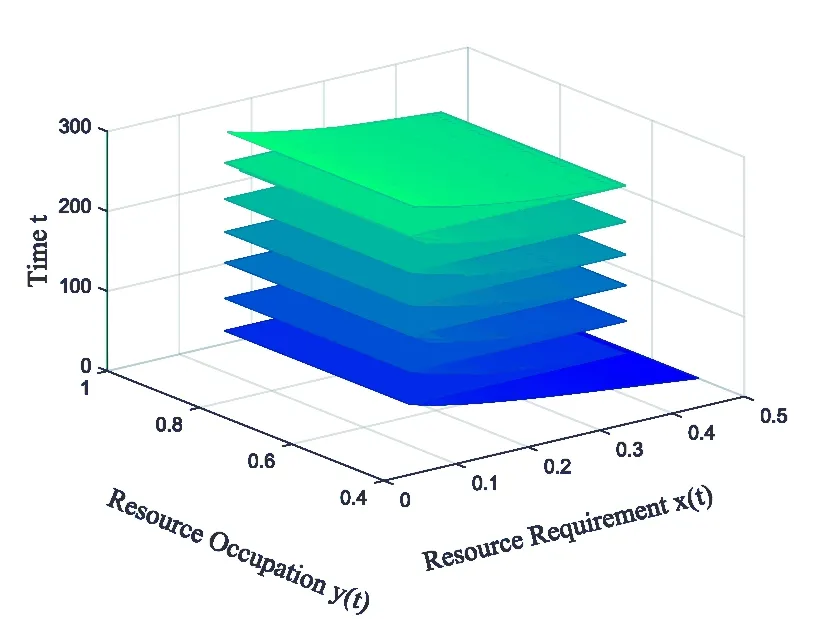
Figure 12.Stable periodic solution of model(4).
In summary,a task-resource joint management model without any control imposed will suffer from excessive consumption of system resources and system crashes;then if we implement a control strategy only for the system resource occupancy,inefficiency or downtime due to overuse of resources will be effectively avoided to some extent;finally,if we impose an effective impulsive control on both system resources and resources required by tasks,we can not only avoid downtime problems due to excessive resource pressure but also avoid the existence of large amounts of idle resources in the system.The numerical simulation results of the three models are correlated with each other in a progressive manner,which logically illustrates the effectiveness of our proposed intelligent control strategy and reflects the importance of impulsive control strategies in the task-resource joint management of the system.
VI.CONCLUSION
In this paper,we consider a key challenge regarding the realization of the overall resource management of a dispersed computing system.In fact,severely overloaded tasks or a large amount of idle computing resources in the system will adversely affect the dispersed computing system.This paper aims to quantitatively describe the dynamic transformation relationship between the resources required by the task and the resources occupied by the system,and establish a mission-aware and intelligently controlled taskresource joint management model to realize the efficient and stable operation of the dispersed computing system.Firstly,we implemented a task-resource joint management model,which can quantify the dynamic transformation relationship between the resources required by the task and the resources occupied by the system in dispersed computing.Secondly,we developed a task-resource joint management model with intelligent control.The state feedback impulsive control strategy involved in this model utilizes the advantages of real-time perception resources of dispersed computing to solve the problem that the system will not run inefficiently or downtime due to excessive resource usage,and ensure the efficient and stable operation of the dispersed computing system.Lastly,we further proposed a task-resource joint management model with bi-directional intelligent control,which can intelligently select reverse suppression or forward incentive strategies,effectively coping with the extreme situations of resource overload and large amounts of resources idle.This method greatly improves the utilization and availability of the dispersed system,and ensures the efficient and stable operation of the dispersed computing system.
In the future,the task-resource joint management model with intelligent control can be compiled into algorithms,and then the programmability of the protocol stack can be exploited to finally implement the dynamic dispersed resource management in real applications and to ensure that the system maximizes the user’s task requests without excessive idle resources and downtime problems.
ACKNOWLEDGEMENT
This work was supported in part by the National Science Foundation Project of P.R.China(No.61931001)and the Scientific and Technological Innovation Foundation of Foshan,USTB(No.BK20AF003).
- China Communications的其它文章
- Catalyzing Random Access at Physical Layer for Internet of Things:An Intelligence Enabled User Signature Code Acquisition Approach
- Time-Domain Dual Component Computation Diversity Based on Generalized Hybrid Carrier
- On the Performance of Active Analog Self-Interference Cancellation Techniques for Beyond 5G Systems
- Multi Object Tracking Using Gradient-Based Learning Model in Video-Surveillance
- Traffic Engineering Based on Deep Reinforcement Learning in Hybrid IP/SR Network
- Research on Online Education Consumer Choice Behavior Path Based on Informatization