
基于d轴电流误差的永磁同步电机旋变误差角识别方法
2021-10-29 03:25徐鹏程
电气传动 2021年20期
徐鹏程
(中船重工海为郑州高科技有限公司,河南 郑州 450000)
永磁同步电机(permanent magnet synchro⁃nous motor,PMSM)因其卓越的性能而得到了广泛的应用,对其调速性能的研究也是一直以来大家关注的重点,无位置传感器检测法和基于位置传感器检测法是现阶段研究的两种主流方法。无位置传感器检测法在电机处于静止状态或刚通电时无法检测转子位置信息;基于位置传感器检测法因位置传感器的安装误差使得检测结果不能真实地反应转子的实际位置,研究人员在位置传感器检测法的基础上提出了很多方法,但每种方法都有一定的不足之处[1−11]。本文提出了一种基于d轴电流误差的永磁同步电机旋变误差角识别方法。该方法是通过保持id电流误差积分值为零,从而调节初始旋变误差角至正确的旋变误差角。
1 永磁同步电机的数学模型
永磁同步电机(PMSM)可以等效为如图1所示的三相平衡电路(每相包含一个电阻、一个电感和一个电动势),三相电动势瞬时电压之和为零,即 eas+ebs+ecs=0,eas,ebs,ecs分别为三相静止坐标系下的三相反电动势。

图1 永磁同步电机等效电路Fig.1 Equivalent circuit of PMSM
图1电路可以用以下公式描述:
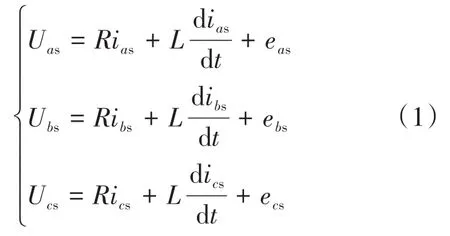
式中:Uas,Ubs,Ucs,ias,ibs,ics分别为三相静止坐标系下的三相电压、三相电流;R为定子电阻;L为定子电感。
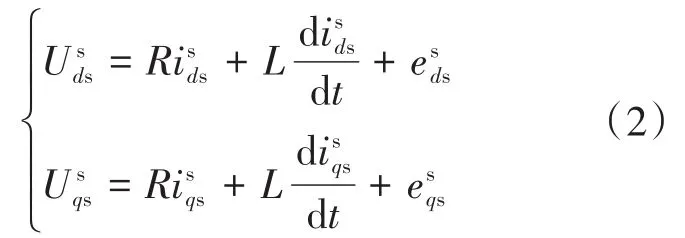
式(1)可以转化为两相静止坐标系下的方程,如下所示:
2 旋变误差角识别方法及实现
2.1 旋变误差角识别方法
图2为永磁同步电机的角度示意图,图2中,as轴、bs轴、cs轴构成三相静止坐标系,d轴和q轴构成实际同步旋转坐标系,dr轴和qr轴构成观测的同步旋转坐标系,θ为实际的转子位置角,θr为位置传感器测的转子位置角,θerr为旋变误差角。
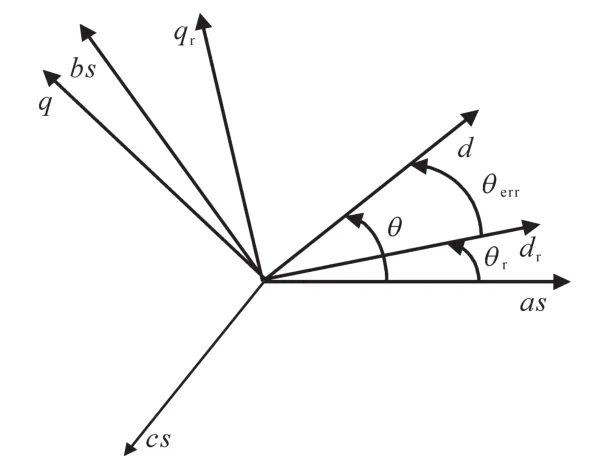
图2 永磁同步电机的角度示意图Fig.2 Angle schematic of PMSM
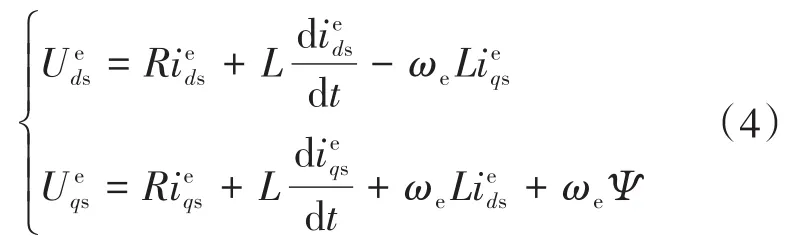
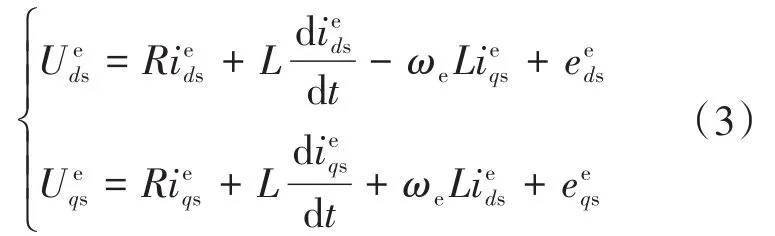
由式(4)可知:当用于参考坐标系转换的转子位置角和实际转子位置角相同时,只有q轴有反电动势;当用于参考坐标系转换的转子位置角和实际转子位置角不同,出现如图2所示的误差角θerr时,反电动势将会同时出现在d轴和q轴。d轴上的反电动势为

式中:eds−err为电流调节器在d轴上的输出反电动势。
具体调节规则如下:
1)当ωe>0,eds−err>0时,θerr<0,也就是所用角度小于实际角度,所以识别角应向上调节;
2)当ωe>0,eds−err<0时,θerr>0,也就是所用角度大于实际角度,所以识别角应向下调节;
3)当ωe<0,eds−err>0时,θerr>0,也就是所用角度大于实际角度,所以识别角应向下调节;
4)当ωe<0,eds−err<0时,θerr<0,也就是所用角度小于实际角度,所以识别角应向上调节。
2.2 实现方法
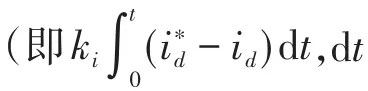
图3为识别角(初始值为0)开始调节标志判断流程图。首先电机开环启动,当采样到的电机转速大于45 r/min时,标志位置为1,否则为0。
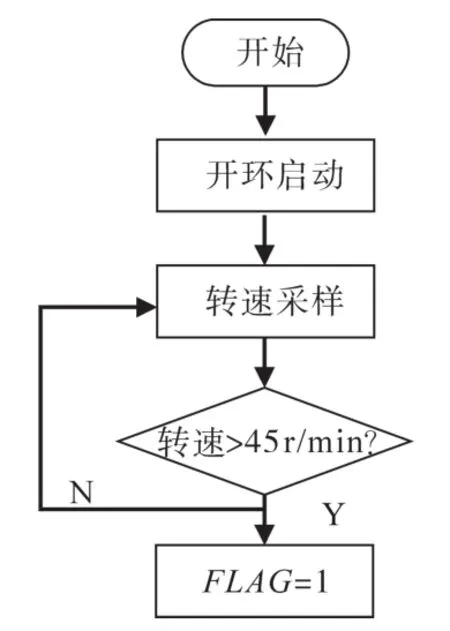
图3 识别角开始调节标志判断Fig.3 Marker judgment when recognition angle starts to adjust
图4 误差角识别过程Fig.4 Error angle identification process
3 仿真和试验验证
3.1 仿真实验
建立如图5所示的仿真模型。

图5 永磁同步电机控制系统的仿真模型Fig.5 Simulation model of PMSM control system
永磁同步电机仿真参数如下:定子电阻33 mΩ,直轴电感2.67 mH,交轴电感3.91 mH,极对数4,永磁体磁链0.869 4 Wb,额定电压1 000 V,额定电流116.4 A,额定频率133.3 Hz,额定功率180 kW,直流母线电压1 500 V。
通过修改永磁同步电机的初始角来模拟旋变误差角。模拟旋变误差角识别方法采用2.1节的方法。分别设置电机初始角为4 rad,3.3 rad,仿真时间为0.2 s。仿真结果分别如图6、图7,上图为识别角度θrec波形,中图为设置的初始角θinit波形,下图为识别角度与设置初始角的偏差θerr波形。从仿真结果可以看出,经过不到0.1 s时间后,识别出的角度基本等于初始角,识别角度与设置初始角的偏差小于0.04 rad。
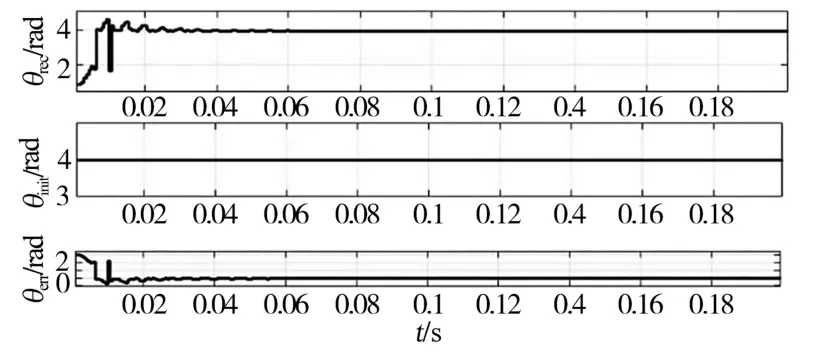
图6 仿真结果(初始角为4 rad)Fig.6 Simulation results(initial angle is 4 rad)
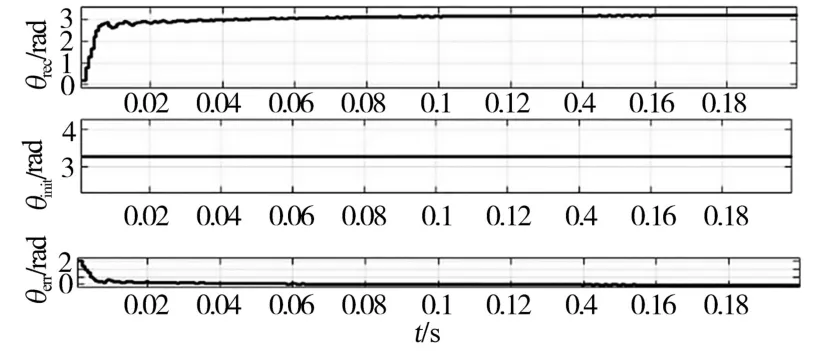
图7 仿真结果(初始角为3.3 rad)Fig.7 Simulation results(initial angle is 3.3 rad)
3.2 试验验证
小功率试验验证平台如图8所示,包括永磁同步电机、直流电机和飞轮,直流电机用于提供稳态负载,飞轮用来模拟大惯性负载。

图8 小功率永磁模拟联调试验台Fig.8 Low-power permanent magnet simulator
永磁同步电机的试验参数如下:定子电阻415 mΩ,直轴电感10.99 mH,交轴电感17.84 mH,极对数4,永磁体磁链0.657 5 Wb。
通过比较光DA输出的AB相线电压(程序计算的AB相线电压,通过光DA输出到录波仪上)和电压传感器测得AB相线电压的相位差。具体是电机开环启动,旋转到40 r/min停机,通过录波仪记录光DA输出的AB相线电压和电压传感器测的AB相线电压,通过比较两个电压相位,可以得到实际的旋变误差角为3.09 rad。然后电机开环启动,到45 r/min时,开始采用第2节的方法进行辨识,当辨识结束标志为1时,停机,通过上位机记录旋变误差角。重复10次试验,结果如表1所示。

表1 试验结果Tab.1 Experimental results
从表1可以看出,识别出的旋变误差角和实际的旋变误差角最大偏差的绝对值为0.04 rad。
4 结论
本文首先得到永磁同步电机的数学模型,然后在此基础上,提出一种基于d轴电流误差的永磁同步电机旋变误差角识别方法。该方法是通过保持id电流误差积分值为零,从而调节初始旋变误差角至正确的旋变误差角。最后,对所提方法进行了仿真和试验验证,结果表明了所提方法的可行性和有效性。
在数字调速系统中,通过软件编程在控制器内部建立该识别方法实际的控制算法,控制器实时检测实际反馈的电流值并同给定目标转速下对应的电流值做比较,经过控制器内部运算后进而调整输出电流的大小和抱闸的动作,进而控制系统进入理想转速。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
电机与控制应用(2013年9期)2013-11-21
电机与控制应用(2012年10期)2012-08-28
