
基于母线电压动态变化的电动汽车永磁同步电机控制策略*
2012-08-28 06:50:52黄苏融王维辰
电机与控制应用 2012年10期
黄苏融, 王维辰, 王 爽, 史 岱
(上海大学机电工程与自动化学院,上海 200072)
0 引言
电动汽车电池的充放电过程会造成电机系统母线电压幅值的动态变化。母线电压对应的电机基速和转折速度将电机运行区域分为恒转矩区和恒功率区,并分别使用最大转矩/电流比控制[1]和弱磁控制[2]。由于母线电压变化引起电机的基速和转折速度变化,可能导致电机系统失控或者无法获得最优的能源利用率[3]。为提高母线电压利用率和电机运行效率,并防止电机系统失控,开展基于母线电压变化的控制策略研究具有显著的应用价值。
文献[4,7]提出了一种反电势电压限幅法,在母线电压下降时,可防止电流调节器饱和,但只适用于恒功率运行区的弱磁控制,动态性能欠佳。文献[5-6]以转矩、转速和电压为依据,建立3维指令表,在防止电流调节器饱和的同时有效地提高电机运行效率。但该方法数据庞大,建表耗时,插值误差大。针对这些不足,文献[3]采用了电压反馈调整指令法,建立2维指令表,将转速、转矩和母线电压按一定的内在比例作为控制指令调整的依据,修正电流指令,消除母线电压动态变化造成的影响,并应用于韩国“现代”YF Sonata混合动力汽车中。但是指令表各个比例系数依据不同的电机参数变化,不具备通用性。
本文在分析比较各种基于母线电压变化控制策略的基础上,提出“将实际母线电压向额定母线电压等效折合,同比调整作为查表依据的电角速度指令值”的方法,直接对控制指令进行实时调整,有效防止调节器失控并提高电机运行效率。仿真与试验验证了该方法的可行性。

图1 电机的基速、转折速度和运行区域
1 IPM同步牵引电机定子电流最优控制
正弦稳态下电机定子电压矢量us的幅值与电角速度ωe有关,即电角速度受到电压极限值的制约。电机基速(第一转折速度)ω1与第二转折速度ω2表达式如式(1)、式(2)所示:


ud、uq——dq轴电压;
id、iq——dq轴电流;
Ld、Lq——dq轴电感;
ψmag——永磁体磁链;
pn——电机的极对数。
如图1所示,电流极限圆和最大转矩/电流比轨迹交于A点,通过A点的电压极限椭圆对应的电角速度为基速,而通过坐标原点的电压极限椭圆对应的电角速度为第二转折速度。
定子电流最优控制是根据不同的电机运行区域,选择使用最大转矩/电流比控制和弱磁控制的一种混合控制策略。电机基速将运行区域分为恒转矩区和恒功率区,第二转折速度将恒功率区分为弱磁A区及弱磁B区。如图1所示,在恒转矩区定子电流矢量轨迹始终不离开OA段,满足最大转矩/电流比的控制规律,使电气损耗降到最小,电机系统效率最高,同时,系统对逆变器额定电流容量要求最低,指令表达式如式(3)和式(5)所示。在弱磁B区,为避免电流调节器饱和,使用弱磁控制,定子电流轨迹在OBC区域内,指令计算如式(4)和式(5)所示。弱磁A区,即OAB区域,根据负载要求使用最大转矩/电流比控制或者弱磁控制。
2 传统电流指令查表法
传统的定子电流最优控制方法利用式(1)~式(5)建立控制指令表,将母线电压视为常值,由电机的电角速度决定控制区域。实时控制中使用电角速度ωe,转矩指令Tem进行2维查表,得到电流控制指令。查表方式如图2所示。
传统的控制方法如图3所示,当母线电压升高(Udc1→Udc2),A1点和B1点不能提高母线电压的利用率,导致电机运行效率下降。反之,当母线电压下降(Udc2→Udc1),电机无法运行在A2点和B2点,电流调节器饱和并失去对定子电流的控制能力。这是传统控制方法没有考虑母线电压变化造成的弊端。

3 考虑母线电压变化的定子电流最优控制策略
针对传统控制方法的不足,本文基于母线电压变化的控制策略,提出“将实际母线电压向额定母线电压等效折合,同比调整作为查表依据的电角速度指令值”的改进方法,在查表法中植入母线电压值,根据母线电压的变化及时调整电角速度基值和控制指令值。改进后的查表方式如图4所示。

图4 改进控制方法的电流查表方式

当电角速度小于ω1,运行于基速区,采用转矩指令进行一维查表;电角速度大于ω1,则运行于恒功率区。
电机在恒功率区运行受电角速度和母线电压共同制约。根据电压椭圆公式(7),在任一状态下,ulim/ωe比值确定唯一的电压椭圆。

以额定的母线电压udc-r及其额定的基速ω1-r建立控制指令表。当母线电压udc变化,所对应的实际基速ω1如式(6)所示:
保持电压椭圆不变,依据折合理论[7],将实际的母线电压向额定的母线电压折合,计算折合后的电角速度,如式(8)所示:

式中:udc——实际母线电压;
ωe——实际电角速度;
udc-r——额定母线电压;
ω'e——等效折合后的电角速度。
ω'e作为在额定母线电压计算体系恒功率区的查表依据,与转矩指令Tem共同进行二维查表得到恒功率区对应的电流指令值。
改进后的基于母线电压变化的控制方法如图5所示。当母线电压上升,控制指令从A1点和B1点向A2点和B2点转移,减小弱磁程度,提高母线电压利用率和电机效率。反之,电压下降,控制指令由A2点和B2点转向A1点和B1点,防止电流调节器的饱和与失控。

图5 改进的控制方法
4 仿真及试验验证
本节首先采用仿真分析方法比较未考虑母线电压变化的传统控制方法和基于母线电压变化的改进控制方法在电压下降时的电流特性和转速转矩特性。通过仿真试验方法,比较两种控制方法在电压上升时的机械特性与效率特性。
电机的参数值如表1所示。

表1 电机参数值
4.1 仿真分析
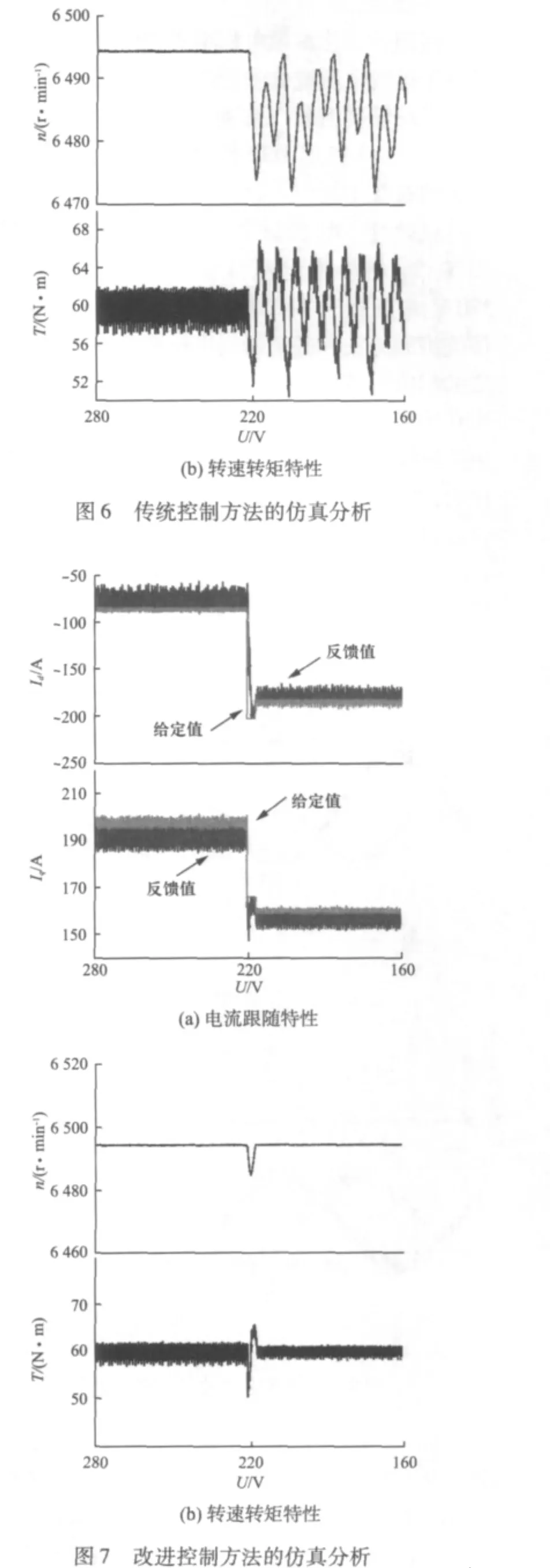
图6和图7为电机运行于恒功率区,转速6 500 r/min、负载转矩 60 N·m,母线电压从280 V突降至220 V的仿真结果。
图6为采用未考虑母线电压变化的传统控制方法的仿真结果。当电压突降后,dq轴电流调节器饱和并产生振荡,失去对定子电流的控制能力,导致转速和转矩持续振荡。
图7为采用基于母线电压变化的改进控制方法的仿真结果。当电压突降后,控制指令及时调整,dq轴电流调节器快速跟踪电流给定值,转速和转矩无持续振荡,满足运行要求。

4.2 试验结果
使用数字化虚拟电机半实物仿真试验平台进行基于母线电压变化的控制方法的试验验证。该平台以现场可编程门阵列(FPGA)构造电机和逆变器模型,并使用DSP作为控制器,是验证控制算法的有效工具[8]。
试验中,电机转速6 500 r/min,负载转矩70 N·m,将母线电压从额定的280 V提高至320 V,电压提升14.28%。图8和图9分别显示传统控制方法和基于母线电压变化的改进控制方法的相电流波形,示波器横轴为0.5 ms/div,纵轴为0.5 V/div,相电流信号的变比为311 A/V;其中传统控制方法的相电流有效值为163.58 A,改进后的控制方法的相电流有效值为153.41 A。由此可见,采用改进的控制方法后,当电压提升14.28%时,相电流降低6.22%,电机铜耗下降12.05%。进的控制方法拓宽了恒转矩区域的范围。在恒功率运行区,有效地降低电流幅值,从而降低铜耗,整个弱磁区间效率提升1.5% ~4.3%不等。
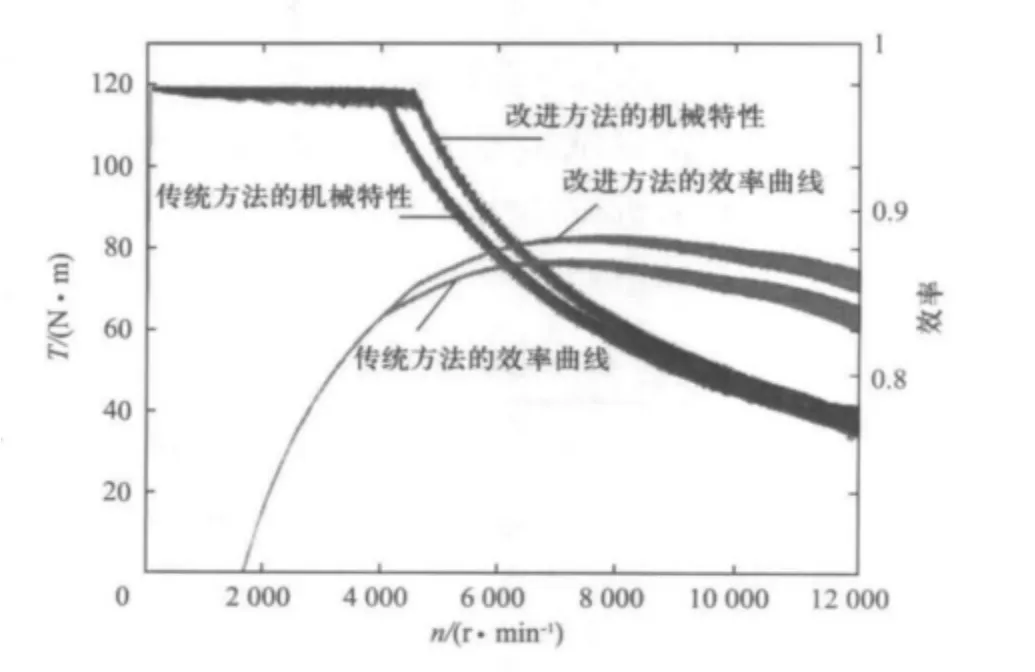
图10 传统方法和改进方法的机械特性及效率曲线比较
5 结语

图10是母线电压升高至320 V的情况下分别采用传统控制方法和基于母线电压变化的改进控制方法得到的机械特性曲线和效率曲线。由图10可见,当母线电压升高至320 V后,采用改
采用未考虑母线电压变化的传统控制方法在母线电压上升时,不能提高母线电压利用率和电机效率;在母线电压下降时,电流调节器会产生饱和,系统失去对定子电流的控制能力。
本文在分析比较各种基于母线电压变化控制策略的基础上,提出“将实际母线电压向额定母线电压等效折合,同比调整作为查表依据的电角速度指令值”的改进方法,直接对控制指令进行修正。该方法概念清晰,实施方便,通用性强。
通过仿真试验验证,改进的方法在母线电压上升时,有效提高母线电压利用率及系统运行效率;在母线电压下降时,避免了电流调节器的饱和与失控现象。
[1]CONSOLI A,SCARCELLA G,SCELBA G,et al.Steady-state and transient operation of IPMSMs under maximum-torque-per-ampere control[J]. IEEE Transactions on Industry Applications,2010,46(1):121-129.
[2]YANG J Y,MA Q,DENG Y,et al.Flux-weakening capability of flux-switching permanent magnet motor[C]∥International Conference on E-Product EService and E-Entertainment(ICEEE),2010:1-4.
[3]KIM B,KWAK M,CHUNG T,et al.A method for improving HEV motor system efficiency considering battery voltage variation[C]∥IEEE 8th International Conference on Power Electronics and ECCE Asia(ICPE & ECCE),2011:677-682.
[4]KIM J M,SUL S K.Speed control of interior permanent magnet synchronous motor drive for the flux weakening operation[J].IEEE Trans Ind Applicat,1997(33):43-48.
[5]KWON T S,CHOI G Y,KWAK M S,et al.Novel flux-weakening control of an IPMSM for quasi-six-step operation[J].IEEE Trans Ind Applicat,2008,44(6):1722-1731.
[6]LEE J H,LEE J H,PARK J H,et al.Fieldweakening strategy in condition of DC-link voltage variation using on electric vehicle of IPMSM[C]∥IEEE International Conference on Electrical Machines and Systems(ICEMS),2011:1-6.
[7]李发海,王岩.电机与拖动基础[M].北京:清华大学出版社,2005.
猜你喜欢
自动化与仪表(2018年7期)2018-07-31 08:41:56
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
电测与仪表(2015年5期)2015-04-09 11:30:46
电机与控制应用(2013年9期)2013-11-21 08:00:04
