
基于YOLOv3-satellite的航天器模型目标检测方法
2021-10-29 12:18田伟杰郭大波孙佳
电子设计工程 2021年20期
田伟杰,郭大波,孙佳
(山西大学物理电子工程学院,山西太原 030006)
随着航天工业的迅猛发展,航天器数量大幅度增多,航天器自动识别的需求日益增加[1]。在此背景下,现代航天器检测技术已经开始逐渐融合机器学习技术,作为其学习的核心之一,深度学习技术在未来太空环境和外太空空间探索的工程应用中,为高检测率、高鲁棒性的航天器实时多目标检测系统提供了良好的技术基础[2-5]。
考虑到航天器结构、外形等因素[6],该文首次将基于Darknet 深度学习框架下的YOLOv3 算法应用到航天器目标检测系统中,原有的测量方法效率较低,故而需要改进。基于Darknet 深度学习框架下的YOLOv3 算法,根据航天器特有的特征信息分析选择出更合适的锚框,采用DIoU 边框回归函数改善了原函数计算代价函数时对图片中心不敏感的问题,利用文中提出的YOLOv3-satellite 网络模型,实现对航天器数据集的特征性训练与学习,mAP 高达93.3%,并获得30.1 fps的检测速度。
1 传统YOLOv3算法
对于YOLOv3 网络架构来说,通常包括两部分:①检测网络,其功能是多尺度预测;②Darknet53 骨架网络,是残差层与卷积层共同作用的结果,多用于特征提取过程[6-8],具体见图1。系统的运行理念是在网络层级中构造了“直连通道”,可以将某层级输出的原始参数直传到目标层级,有效降低系统运行中由于多级传输造成的能量耗损,在一定程度上缓解了深度神经网络中的梯度消失问题[9-11]。其原理如式(1)所示。
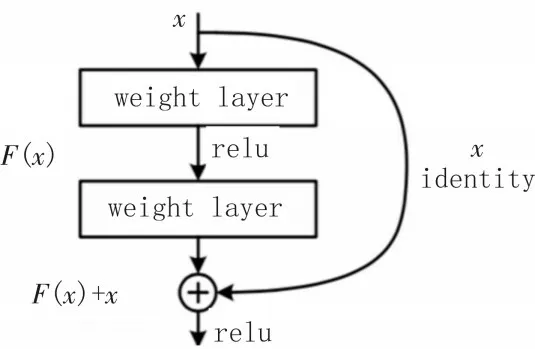
图1 残差层结构图

在式(1)中,残差层要求的输入量有两个,一个是x,另一个是通过两次卷积运算得到的F(x)。在卷积运算过程中,第一次卷积运算的核尺寸是1×1,选择1 为步长,第二次卷积运算的核尺寸是3×3,选择1为步长。此外要提高网络的整体性能,在各个层级卷积之后,需要将线性单元和批量归一化层添加在各个层级卷积之后,考虑到收敛时间长的问题,可通过Batch Normalization 层进行改善,考虑到深层网络梯度消失的问题,可通过leakyRelu 式激活函数进行改善[12-16]。
对于Darknet53 网络来说,可按照图2 所示的参数进行配置。将416×416的图像输入到Darknet53网络后,其输出参数见图2。右侧残差循环次数显示在图2 左侧,输出特征图的尺度有13×13、26×26、52×52、104×104、208×208。
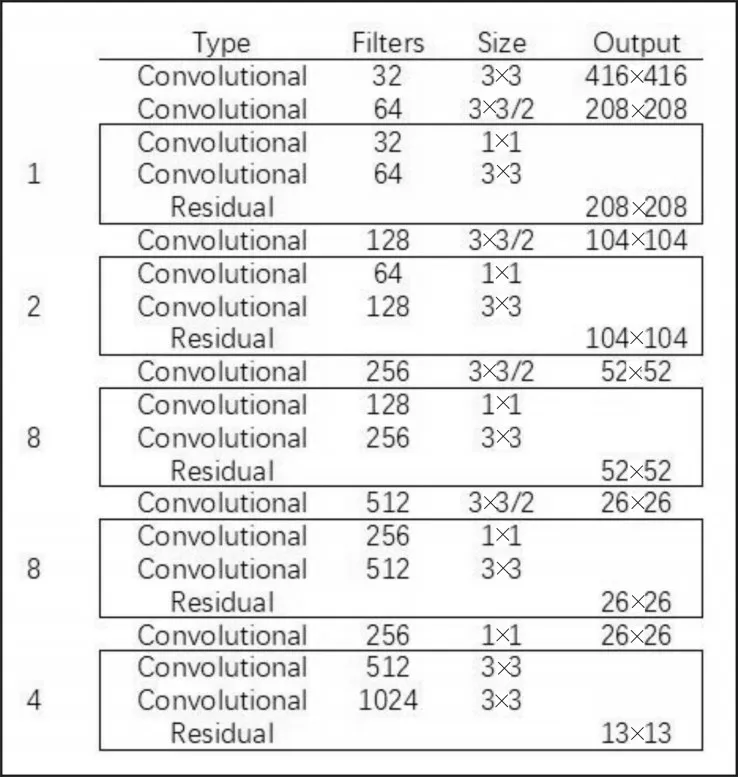
图2 Darknet53 网络结构示意图
2 改进的YOLOv3算法
2.1 改进网络结构
结合该文所用航天器图像数据集的特点,从网络结构方面对YOLOv3 模型进行了改进。改进的YOLOv3 算法沿用之前YOLOv3的骨架网络,将YOLOv3 中(从除net 层开始的第一个卷积层记为第0 层)第62 层至第74 层改为DenseNet的密集连接型结构,取代部分残差层,并在原第61 层之后增加一层卷积层。这样使网络结构对特征较为明显的数据集会有更加优异的检测效果,改进的网络结构如图3 所示。
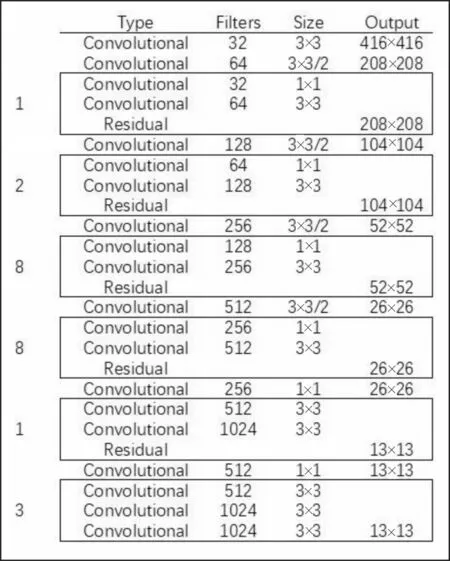
图3 改进的网络结构图
相较于原有网络体系,该网络结构可以实现更加直接有效地传递并利用特征图与梯度,在每一个层级上,可使用部分原始层的信息,计算系统的损失函数与梯度参数,从而提高网络特征的提取深度,有效缓解梯度消失问题,也有助于构建更深层次的网络。
2.2 anchor的适应性调整
在COCO 数据集基础上利用YOLOv3 聚类算法得到锚点的数量为9个,分别是(373,326)、(156,198)、(116,90)、(59,119)、(62,45)、(30,61)、(33,23)、(16,30)、(10,13)。对于自制航天器数据集来说,需要重新针对先验框数量及尺寸进行选择,采用K-means 聚类算法,从而能更精确、实时地检测航天器,接着采用维度聚类分析的手段处理目标框的宽度和高度,旨在实现聚类方案和效果的最优化,判断评估方法好坏的方法是平均交并。根据实验过程发现,K的取值范围是1 至某值,平均交并比随着K值的增大而逐渐减小,取不同K值进行多次实验,如图4 所示,当K值小于9 时,平均交并比保持很慢的速度进行优化,故确定先验框的数量为9 个。
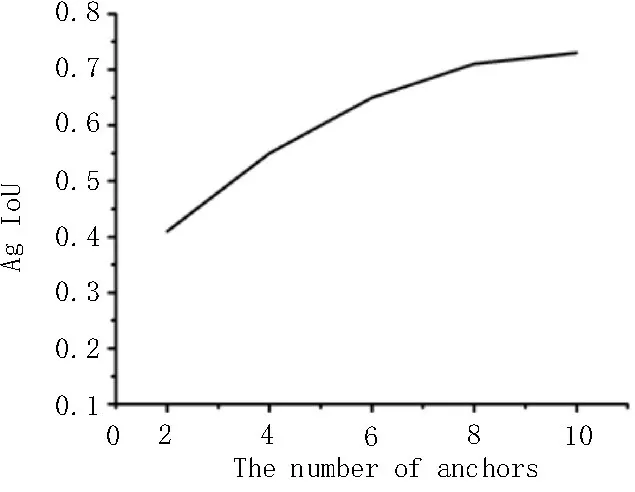
图4 anchors数量和平均交并比评估图
如图5 所示,根据数据的宽、高分布信息,横坐标表示目标的宽度值,纵坐标表示目标的高度值,经过多次实验测试生成该尺度下的最优anchor box 尺寸为(51,80,99,123,209,157,335,109,176,222,150,331,342,218,249,303,360,352)。
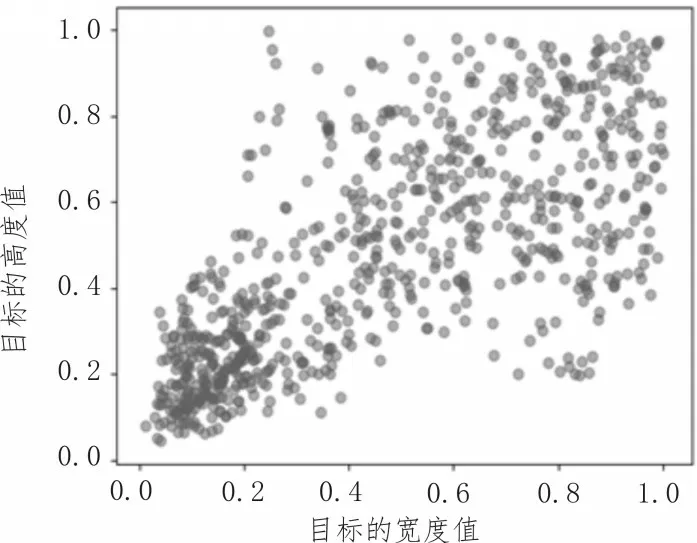
图5 该文数据集的目标归一化后的宽高分布图
2.3 改进边界框回归函数IoU
现阶段,图像分割、目标跟踪、目标检测对边界框回归的精确度提出了很高的要求,对于边界框来说,通常将其回归损失函数确定为L2 范数和L1 范数,往往忽略了预测框与真实框的交并比IoU(Intersection over Union)在边界框回归中的重要性,IoU 定义如式(2)所示。
原始IoU 没有考虑真实框与预测框中心点的距离信息,实际情况下,中心点的距离越小预测得越准。DIoU 可以很好地反映中心点距离的情况,anchor 越靠近边缘,误差越大,那些与目标框没有重叠的anchor 基本无法回归,而DIoU 对于不同距离、不同方向的anchor,DIoU 都能做到较好的回归。从而表现出较之前更为精确的结果,改进后的DIoU 关系式如式(3)所示。

3 实验结果及分析
3.1 YOLOv3-satellite网络性能分析
该次实验基于Darknet53.conv.7 预训练模型,利用优化网络模型完成11 000 次训练,原始YOLOv3的mAP、loss 函数曲线如图6 所示。
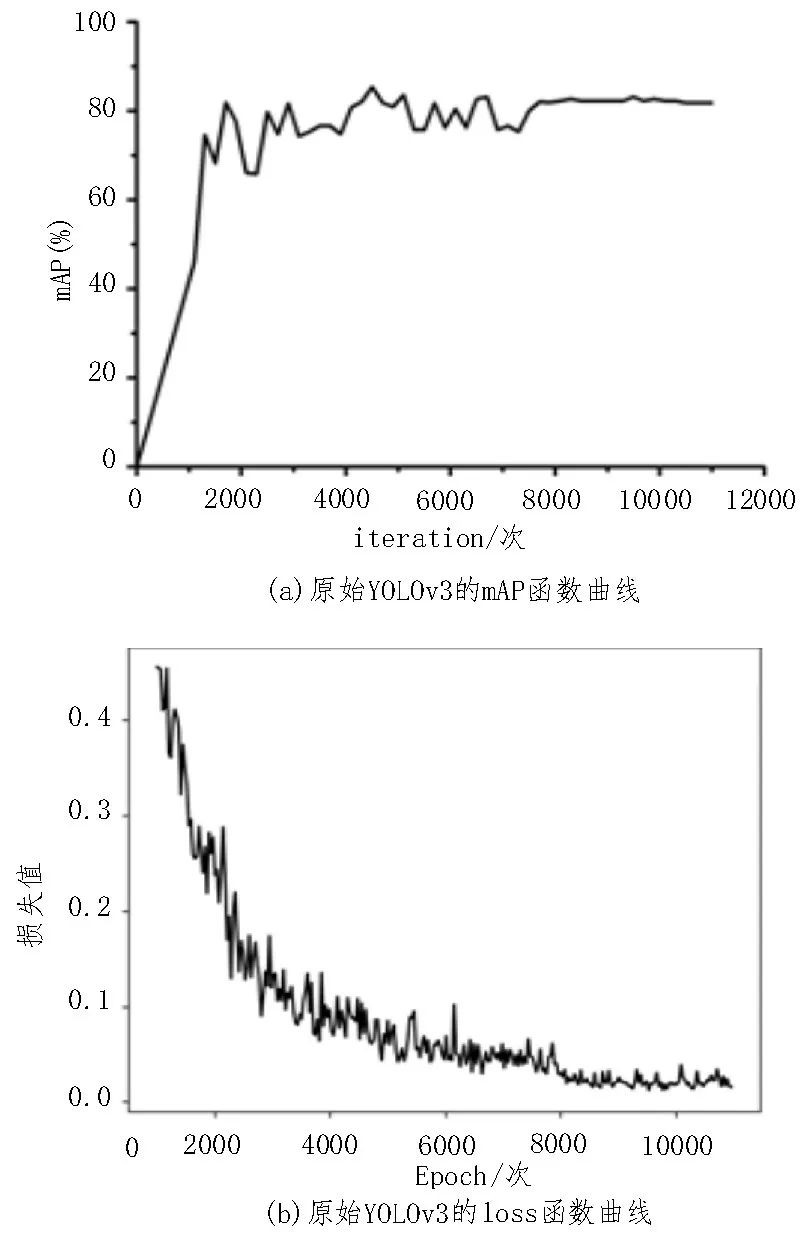
图6 原始YOLOv3的mAP、loss函数曲线
与原始网络结构相比,新的密集型网络结构产生的实验数据如图7 所示,在mAP 上的实验结果更加优异,其mAP 值提升至90%。
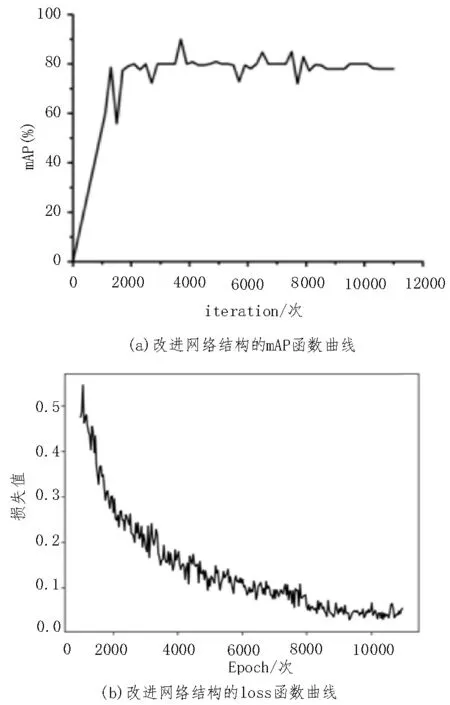
图7 改进网络结构的mAP、loss函数曲线
改进网络的平均检测精度提高了4.67%,检测速度由19.5 fps 提升到了30.1 fps。改进IoU 模型相比原IoU 模型,检测速度和精度均明显改善,对比如表1 所示。

表1 不同网络模型在数据集上的mAP与速度对比
3.2 DIoU-loss检测性能对比
与原始IoU 计算方法相比,改进网络的平均检测精度提高了1.34%。可以看出loss 函数下降很快,这是因为DIoU 损失可以直接最小化两个边界框的距离,因此收敛速度比原始IoU 边界框预测函数快得多,改进DIoU的mAP、loss 函数曲线如图8 所示。
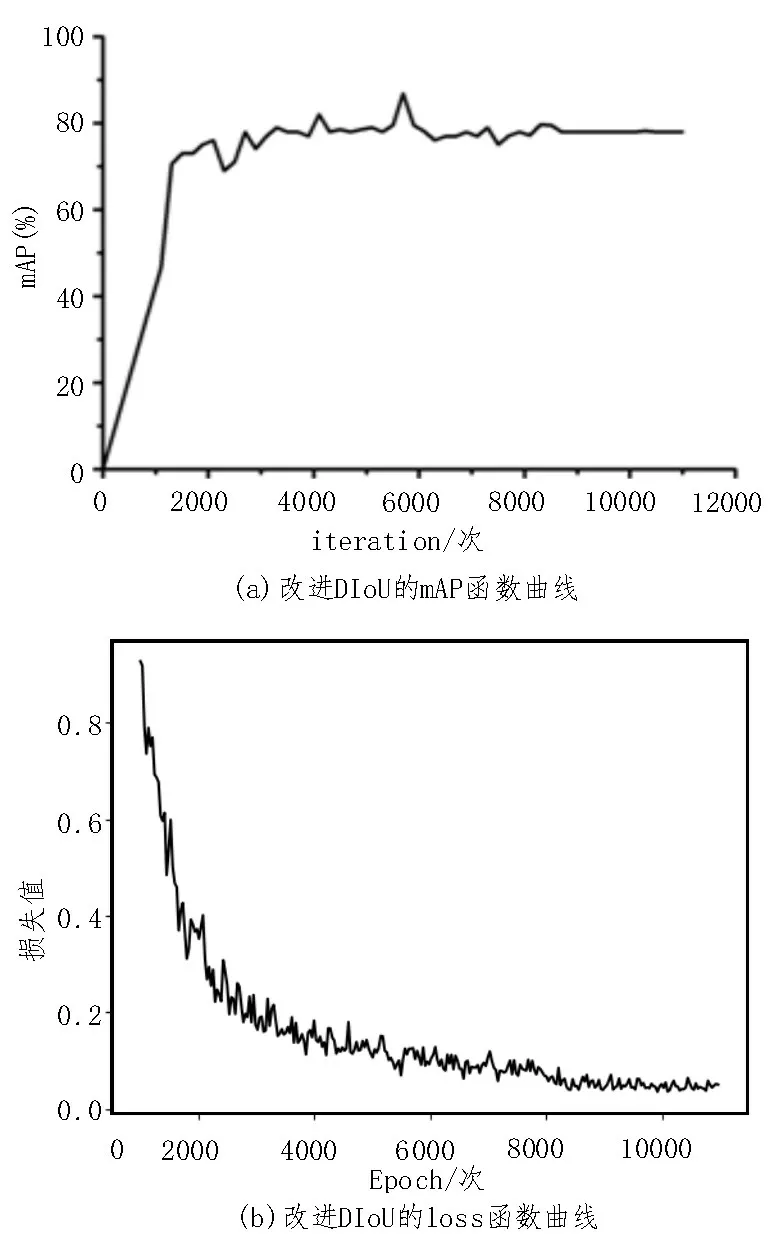
图8 改进DIoU的mAP、loss函数曲线
3.3 综合性能对比
通过对比实验发现,在边框选择、网络结构以及DIoU 方面的改进工作,大幅提高了航天器模型的检测性能。在一个完整的检测体系中,若这三项工作融合使用,则检测水平会进一步提高。故将这三处改进综合起来,取该目标的mAP 值作为改进后模型的整体性能评估指标,表2 是综合改进后的mAP 值与原始YOLOv3的mAP 值对比。

表2 综合改进前后mAP值对比
如图9 所示,改进后的计算模型相较于原始状态下的检测模型,mAP 参数提高7.67%,同时其mAP能很快达到最优值且迭代至中后期时其精确度也更加稳定。故而可以确定,在选用了文中经过改进的方法之后,整个模型的性能获得了显著优化,在检测精度、速度方面都符合目标要求,可用于航天器目标检测。
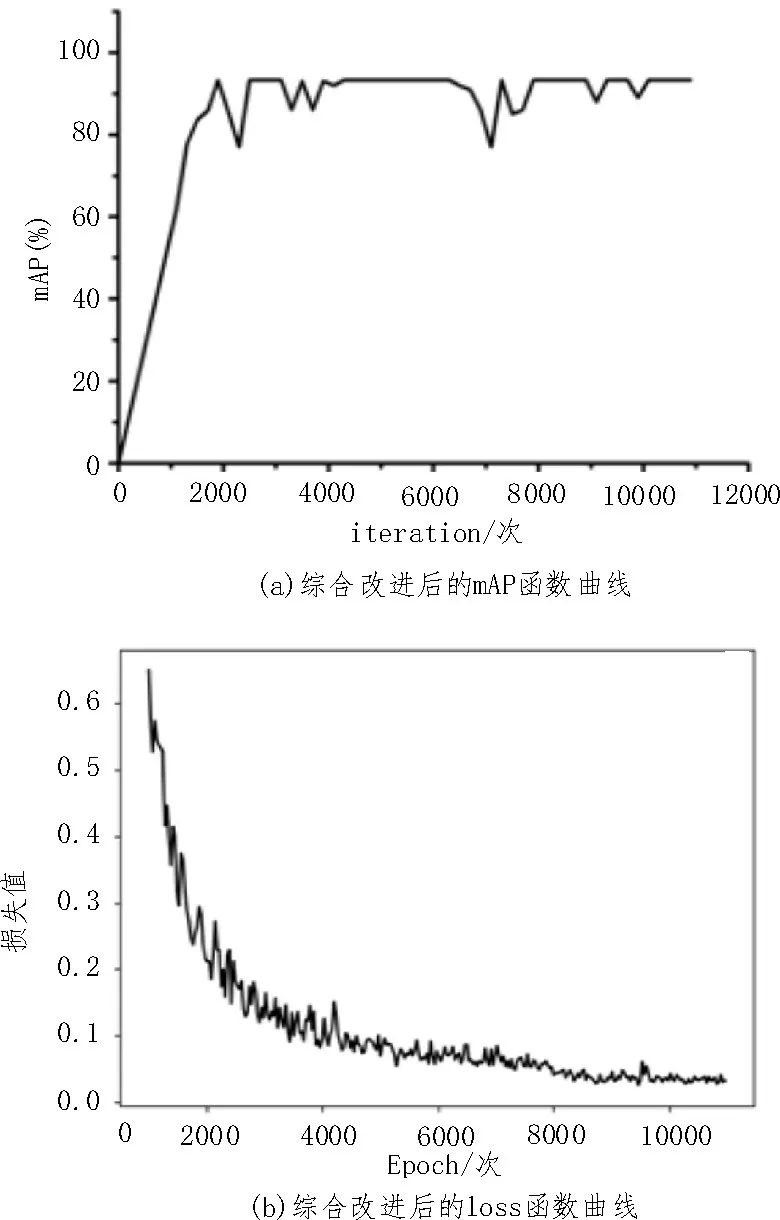
图9 综合改进后的mAP、loss函数曲线
3.4 检测效果对比
如图10 所示,图中的YOLOv3 算法识别出的预测框明显大于改进后的预测框,其准确度得到了明显提升。考虑到数据的多样性和复杂性,特别是针对数据量较小的情形,使用优化卷积神经网络模型往往能改善泛化效果,从而提高航天器检测环境的适应能力。
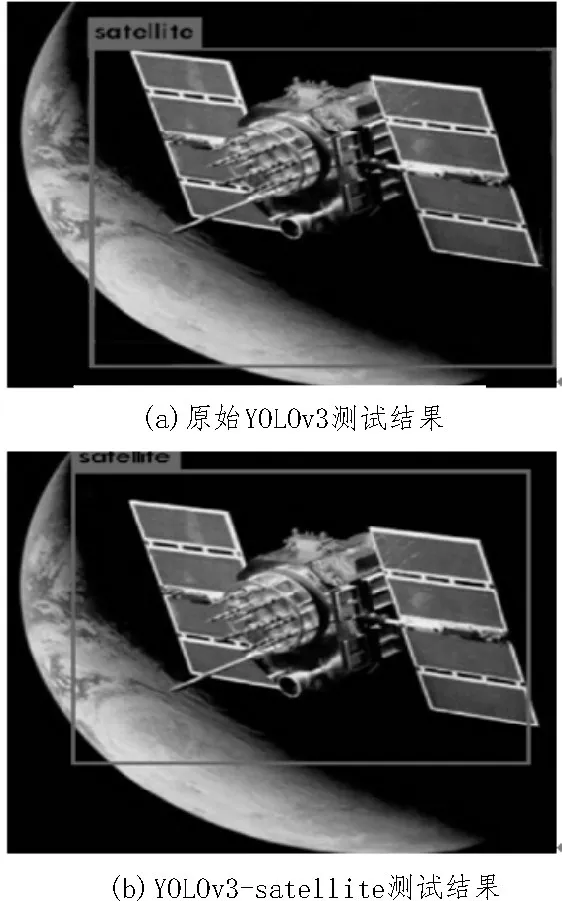
图10 对比YOLOv3-satellite算法与原YOLO算法的结果
4 结论
文中对原YOLOv3 算法进行改进,得到一种全新的YOLOv3 特征提取网络,将DIoU 作为边界框回归损失函数,同时为改善检测过程中的重复率、错误率、漏检率问题,将Darknet53 与DenseBlock 融入到改进后的YOLOv3 特征提取网络中。基于航天器数据集获取先验框的方法选择K-means 聚类分析,在航天器数据集中应用改进后的YOLOv3 算法的检测速度和mAP 分别是30.1 fps、93.3%,验证了改进方案的可行性与可靠性。
猜你喜欢
国际太空(2022年7期)2022-08-16
航天工业管理(2020年9期)2020-12-28
军事运筹与系统工程(2020年1期)2020-09-11
国际太空(2019年9期)2019-10-23
廉政瞭望(2019年5期)2019-06-10
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
系统工程与电子技术(2016年2期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
管理现代化(2016年3期)2016-02-06
