行星离心式新型机械无级传动基本工作特性研究
2021-10-29 09:34:16赵慧鹏周俊杰范淑瑞钱昌贤
中国机械工程 2021年20期
赵慧鹏 周俊杰 李 晋 范淑瑞 钱昌贤
1.北京理工大学机械与车辆学院,北京,1000812.中国北方车辆研究所,北京,1000723.北京瑞昌同创机电科技有限公司,北京,100080
0 引言
无级变速是传动系统中的一种形式,相对于有级变速而言,能够实现对速度的无级调节,实现输入和输出在任意范围内的变化。根据连接介质的不同,无级变速可以分为机械无级变速、液力无级变速和电力无级变速[1],其中机械式无级变速器相对于复杂的动力传动装置包括液力机械综合传动装置、机电复合传动装置和 AT自动变速器等而言,具有结构简单、可靠性高、无级调速方便等诸多优点,应用较多的有行星式、带式、链式和脉动式等[2]。
近年来,机械式无级变速器得到了一定的关注和深入的研究,产生了一些新型的机械式无级传动结构。牛善田等[3]提出了一种通过非圆齿轮传动的新型机械式无级变速器传动方案,并推导出其传动比范围公式。曾文等[4]将棘轮传动与双曲柄机构组合,提出了一种新型的增速型无级变速装置,推导出该类装置传动比与机构参数的函数关系。梁矗军等[5]以使用两级棘轮啮合机构的机械式无级变速器为研究对象,通过对其原理及工作状态进行分析,获得其在非稳态条件下传动比的变化规律,并以此为基础建立无级变速器非稳态PID传动比控制系统。丑幸荣等[6]将行星轮机构和凸轮机构复合,提出了一种具有一定应用范围的简易机械式无级变速器。杨新军等[7]提出一种新型锥形结构机械式无级变速器,采用具有组合运动规律的摆动从动件凸轮机构和单向超越离合器来实现完全的匀速运动。郑宗熙等[8]设计了以槽型凸轮连杆组合机构作为脉动发生机构的新型脉动式无级变速器,并通过仿真得到了不同传动比下的传动性能和输入扭矩的情况,确定了该变速器的具体性能参数。张镭等[9]深入研究了金属链式无级变速器传动机理和其锥盘V形结构的轴向加压原理,为研制性能可靠的轴向夹紧力控制结构与系统奠定了理论基础。储月刚等[10]提出一种新型面接触式摩擦传动结构的无级变速器,即离散式变径带轮无级变速器,验证了离散式变径带轮理论上具有大转矩传动能力。BLAGONRAVOV等[11]考虑无级机械变速器内部元件的振动,阐述了根据内部元件振动幅度进行变速器自动控制的原理。张庆功等[12]提出了由一个双腔半环形无级变速单元、一个固定轴齿轮系和一个闭环双列差动齿轮系组成的新型CVT机构,并求解了其扭矩传递的性能指标。冯能莲等[13]用活齿啮合直接传力的传动方式代替传动带或滚轮摩擦传力的传动方式,提出了一种新型非摩擦式活齿无级变速器inmCVT。MILAZZO等[14]提出了一种新的自调节环形无级变速器(ART-CVT),该变速器具有被动控制速比的功能。
本文基于行星传动装置提出一种新型的行星离心式机械无级传动装置方案,目的在于简化行星传动装置、拓展行星机构的功能,并且探索设计一种新型结构简单的无级传动方案。在实际应用中,传统行星机构一直被用作为一种定传动比的差速器,并且为了获得更大的传动比以满足车辆的行驶要求,行星传动装置都采用了多组行星排和一定数量换挡控制机构(离合器、制动器)以及复杂的操纵装置。若去掉齿圈,动力由太阳轮输入行星架输出,解除齿圈与行星轮之间的耦合关系,并通过其他机构形式建立行星轮与框架之间的传力耦合关系,进而通过行星轮的运行状态和参数实时改变,结合输出负载情况,就可控制行星机构的输出转速和扭矩的变化,从原理上实现传动装置的自适应无级变化。基于上述方案,提出一种新型的行星离心式机械无级传动结构,并对其进行理论分析和仿真研究,检验其实现无级变速和输出力矩和转速可以自适应调整的可行性。
1 行星离心式机械无级传动结构和工作原理
1.1 基本结构
行星离心式机械无级传动结构是一种新型的机械式无级传动装置。该结构利用行星机构的基本结构,舍弃齿圈结构,保留太阳轮、行星轮、行星架等结构,由多个行星轮(含有特殊设计的轴)、转子、框架上的内曲线轨道共同构成了一个偏心装置。该机构主要由太阳轮部分、行星轮部分、离心转子部分和框架部分等四部分组成,其中太阳轮部分由输入轴、太阳轮组成。行星轮部分由行星轮、行星轮轴组成。行星轮轴通过特殊设计,与特殊设计的棱柱形导槽驱动盘相连,随行星轮的转动带动离心转子转动。离心转子部分由两个离心转子本体和滚柱组成,在工作时,滚柱与内曲线轨道接触,实现力的传递。框架部分包括输出轴、辅助支架等,相当于行星架结构,其中框架上设计有特殊的内曲线轨道,完成离心转子的偏心导向。行星离心式机械无级传动结构如图1所示[15]。
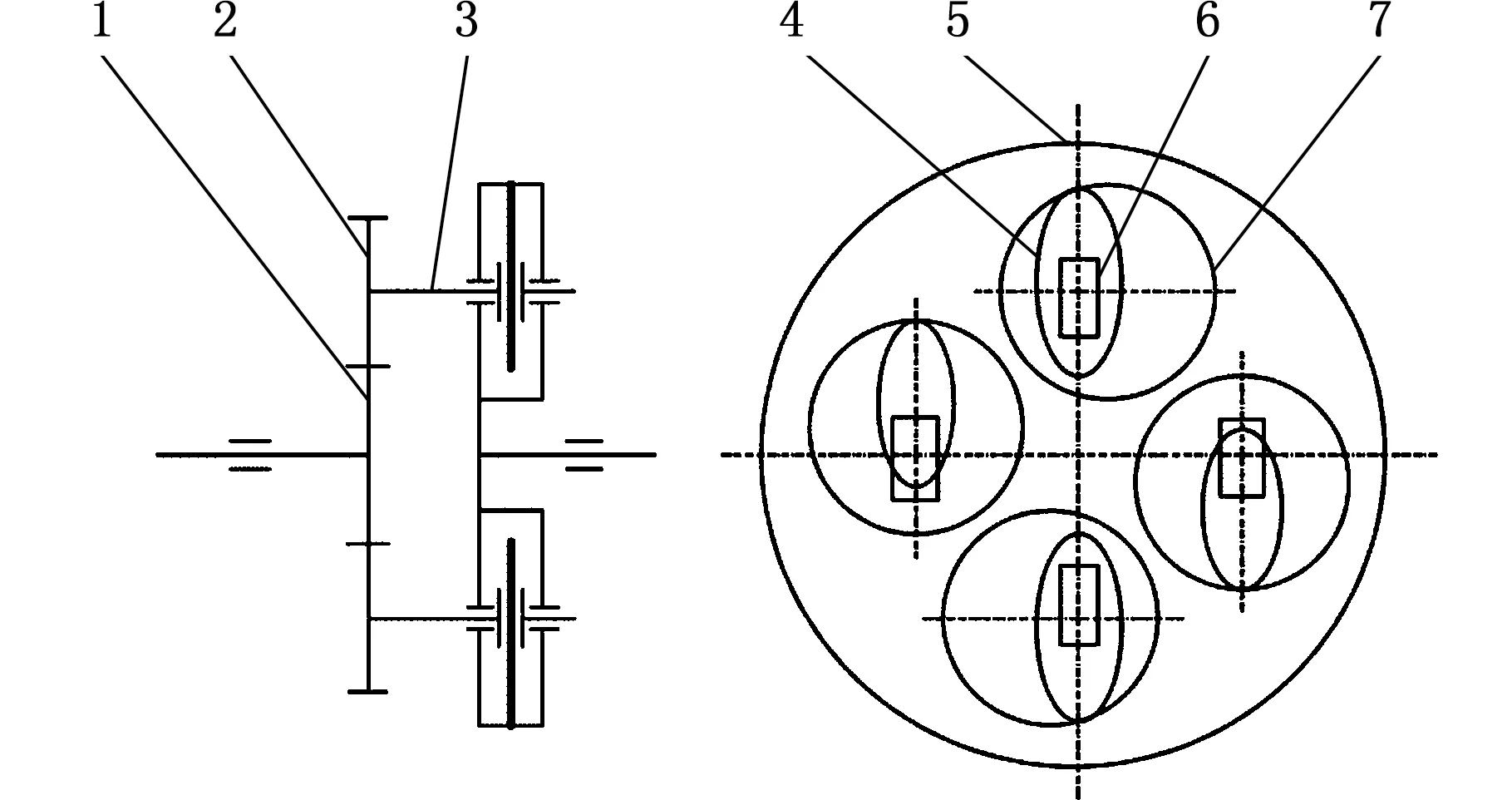
1.太阳轮 2.行星轮 3.行星轮轴 4.离心转子5.框架(行星架) 6.行星轮轴与转子连接的棱柱部分7.偏心圆内曲线轨道图1 行星离心式机械无级传动结构简图[15]Fig.1 Structure of planetary centrifugal mechanicalstepless transmission[15]
1.2 工作原理
在装置工作时,由太阳轮输入转速,驱动行星轮转动,在行星轮轴外伸端安装有棱柱形导槽驱动盘,用于驱动离心转子转动。在行星轮驱动和轨道约束下的离心转子做边转动、边移动的复合曲线运动,依靠离心转子的离心力对框架内曲线轨道接触并产生作用力,推动框架转动,从而使框架即行星架产生输出扭矩。
在转子转动过程中产生的对框架的作用力,与其质量、质心的偏离量以及转动角速度平方成正比。转子质量要根据使用要求和动力装置性能等因素进行综合优化确定,质心的偏心量和轨道的形状有关。行星离心传动变速器原则上可以采用多种轨道曲线,只要有一定的偏心距,离心转子转动过程的离心力便会产生,从而对轨道即变速器的行星框架产生作用力,驱动框架输出力矩。典型的轨道曲线包括偏心圆曲线、偏心椭圆曲线、圆弧+椭圆曲线、圆弧+摆线曲线。当装置结构确定时,转子质量、偏心量便随之确定,此时离心转子对框架的作用力主要与其转动角速度有关,即与行星轮转速有关。
在整个运动过程中,虽然机构缺少齿圈,是一个不完整的行星排,但其主要部分的运动状态仍与行星排的特性相符,即满足下式:
(1)
式中,ω为行星轮角速度,即转子角速度;ωT为太阳轮角速度;ωJ为行星框架角速度;ZT为太阳轮齿数;ZX为行星轮齿数。
如果假定框架的外阻力矩恒定,输出力矩恒定,转子转速(即行星轮自转转速)不再增大,此时太阳轮(主动件)转速的改变量即为框架转动速度(即行星架)的改变量。当框架外阻力增大或减小时,需要输出力矩也增大或减小,转子转速随之增大或减小,框架转速则随之减小或增大。这样其输出扭矩和速度可由输入的转速和外部负载自适应调整,且相对于传统的机械变速箱而言,其传动比可以连续变化,简单的机构就具有无级变速的功能,可在较大范围内改变输出转速和扭矩。
2 动力学建模
2.1 运动和受力分析

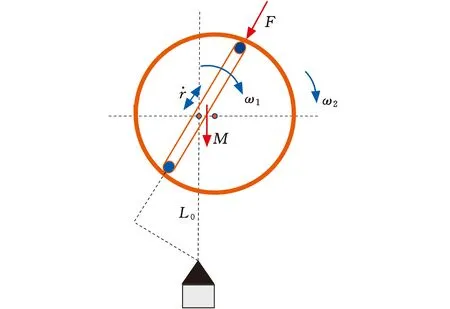
图2 离心传动转子复合运动分解Fig.2 Centrifugal drive rotor compoundmotion decomposition
对于整个系统来讲,主要外力包括输入力矩Tin和负载。离心转子为传动过程中的关键部件,主要对其展开受力分析。以离心转子为研究对象,外力主要包括重力M、轨道作用力F和棱柱形导槽驱动盘施加的摩擦力f。其中轨道作用力的反作用力作用于轨道,产生输出力矩Tout,克服负载做功,因此对轨道作用力的分析是受力分析的关键。为便于分析,假设其方向沿离心转子长度方向,即相当于广义坐标对应的广义力,由此应用拉格朗日方程求解。同时为了简化动力学模型,忽略摩擦力的影响。
2.2 动力学模型
依据分析力学基础知识,建立描述离心传动系统的拉格朗日方程。首先可以得出离心转子的动能,包括转动动能和平动动能。
离心转子转动动能为
(2)
离心转子平动动能为
(3)
离心转子总动能为
T=Tz+Tp
(4)
式中,J为离心转子转动惯量;m为离心转子质量;r为离心转子的相对位移。

(5)
依据求解广义力的拉格朗日方程式:
(6)
取广义坐标为r,代入离心转子动能表达式,分别有
(7)

(8)
因此获得轨道作用力的拉格朗日方程:
(9)
由此可知,如果给定输入转速和输出转速,则ω1可以由式(1)太阳轮输入转速可求得;ω2等于输出转速,同时已知离心传动装置中广义坐标r的运动规律又决定于轨道曲线方程,所以知道了轨道曲线方程,就可以获得作用于离心转子的广义力。
离心转子与轨道间作用力是驱动行星框架运动的力,因此依据上述离心转子的广义力可以求出离心转子作用于行星框架的输出力矩:
T=FL0cosθ1
(10)
3 不同轨道曲线基本工作特性分析
由上文可知,行星离心式机械无级传动装置离心转子的运动规律主要取决于内曲线的形式,它决定了离心转子对框架作用力的变化规律,而正是由于此作用力使框架产生输出扭矩,因此内曲线的性质决定了离心式无级传动装置的输出特性。本文选取偏心圆曲线、圆弧+椭圆曲线、圆弧+摆线曲线三种不同的轨道类型展开分析。
3.1 偏心圆轨道
偏心圆轨道是指离心转子的旋转中心不在圆心的圆形轨道,如图3所示。该轨道形状简单,在装置工作时能够有效地使离心转子产生偏心效果,从而推动框架做功。下面分析这种结构下行星离心传动的基本工作特性。

图3 偏心圆曲线示意图Fig.3 Schematic diagram of eccentric circle curve
根据圆形方程,可知离心转子的偏心距为
(11)
式中,r为离心转子偏心距,即离心转子质心偏离旋转中心的距离;e0为最大偏心距;t为时间;b0为离心转子的半长。
由此,可以计算r的二阶导数。从而根据式(9)、式(10),可以求解出行星离心传动的输出力矩随输出转速和输入转速的变化。计算过程中设定的主要参数如表1所示。
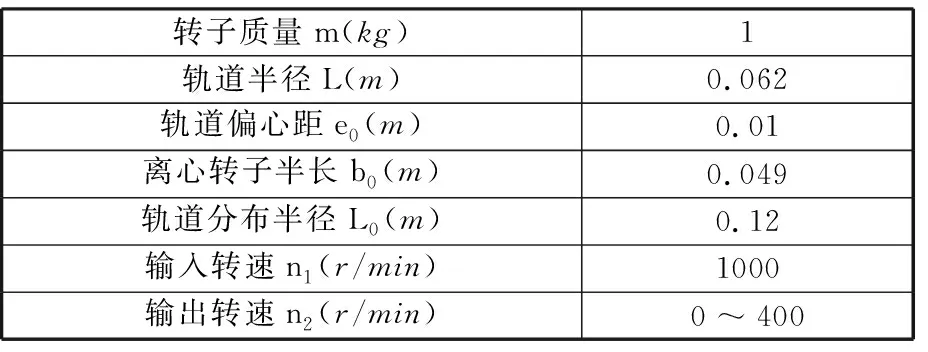
表1 偏心圆轨道的离心传动机构参数
偏心圆轨道输出力矩的变化如图4所示,可基于图4,进一步对输出力矩曲线求平均,由此获得类似于液力变矩器外特性曲线的偏心圆轨道行星离心式机械传动基本输出特性曲线,如图5所示。可以看出在该参数条件下,输出转速为0时,输出力矩最大,约为49 N·m,且随着输出转速的增大,输出力矩逐渐减小,当输出转速减小到600 r/min时,输出力矩为17 N·m。
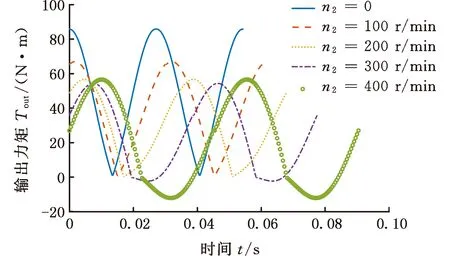
图4 偏心圆轨道输出力矩变化Fig.4 Output torque change of eccentric circular orbit
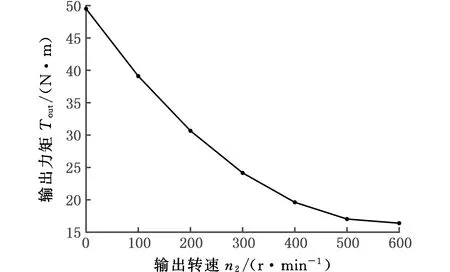
图5 偏心圆轨道输出特性Fig.5 Output characteristics of eccentric circular orbit
以看出,输出力矩Tout随着时间的变化呈现出一定的周期性波动,输出力矩的峰值随着输出转速n2的增大而逐渐减小,而周期却随着输出转速的增大在不断地增大,说明随着输出转速的增大,行星离心式传动机构传动逐渐平稳,与此同时输出力矩在逐渐减小。
3.2 圆弧+摆线轨道
圆弧+摆线轨道是指半圆和两段摆线曲线的组合,如图6所示。摆线曲线轨道部分是离心转子的实际作用部分,圆弧曲线轨道部分实现离心转子的导向。下面分析这种结构下行星离心传动的基本工作特性。
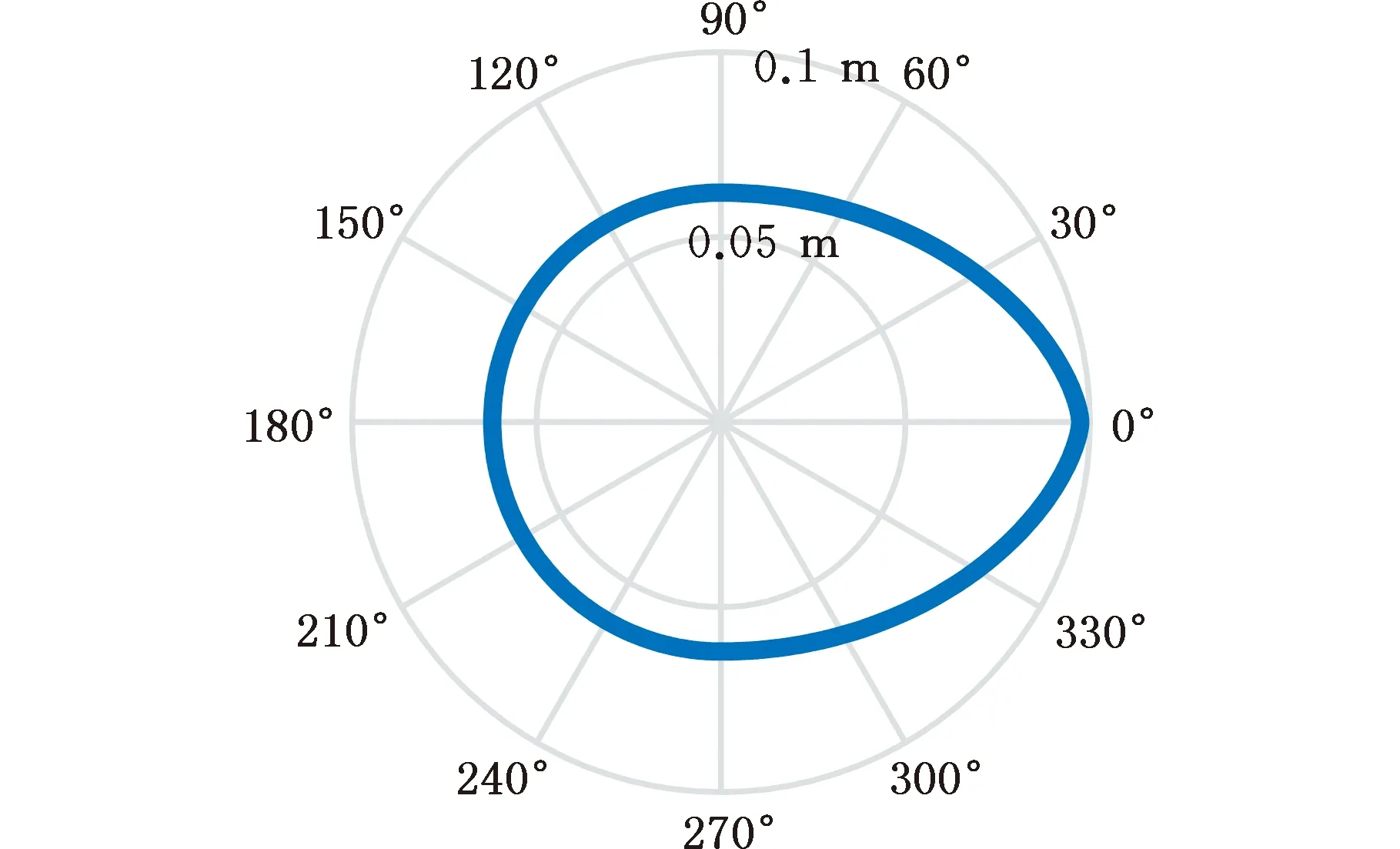
图6 圆弧+摆线曲线示意图Fig.6 Schematic diagram of arc and cycloid curve
摆线轨道曲线的参数方程为
(12)
式中,ra为摆线圆半径;α(中间参数)为摆线圆滚过的角度。
设定的主要设计参数如表2所示。
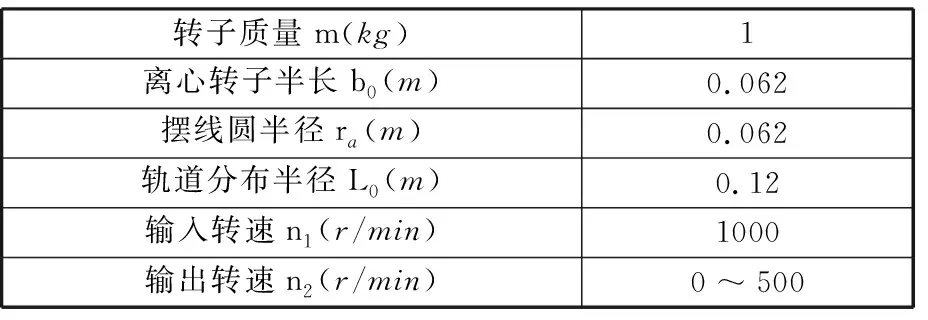
表2 圆弧+摆线轨道的离心传动机构参数
由此式(12)导出的摆线轨道方程较为复杂,为便于计算广义自由度r的二阶导数,将摆线轨道进行多项式拟合,得到的偏心距变化如图7所示,图中显示拟合曲线与摆线轨道曲线具有高度的重合性,因此可以利用拟合曲线的方程进行轨道作用力的计算。
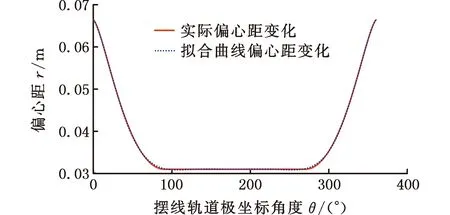
图7 摆线轨道拟合曲线偏心距变化Fig.7 Variation of eccentricity of cycloidal trackfitting curve
以多项式拟合曲线计算广义自由度r的二阶导数,与偏心圆轨道曲线求解过程相同,可以得到行星离心传动的输出力矩随输出转速和输入转速的变化。所得到结果如图8所示。可以看出,输出力矩随时间的变化呈现出一定的波动,其中波峰峰值随着输出转速的增大而减小。较偏心圆输出特性而言,其波峰的峰值较大,当输出转速为0时,峰值达到了300 N·m。但波峰的长度较小,离心转子工作时容易对摆线轨道产生冲击,不利于传动的平稳性。
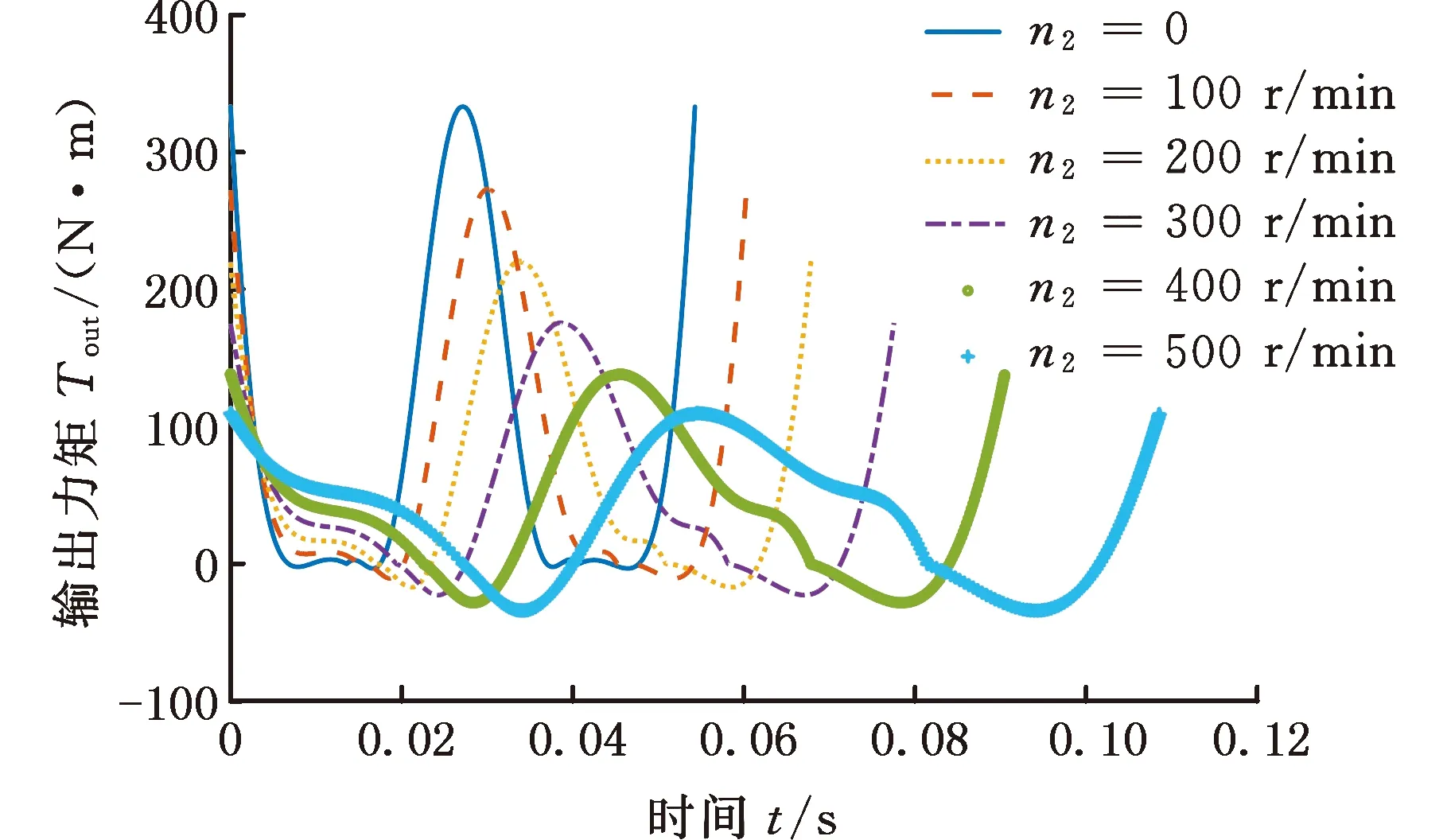
图8 摆线轨道输出力矩变化Fig.8 Output characteristic curve of cycloidcentrifugal drive rotor
由上文可知,摆线轨道的传动规律和偏心圆轨道相似。进一步对输出力矩曲线求平均,可以获得类似于液力变矩器外特性曲线的行星离心传动基本输出特性曲线,如图9所示。从图中可以看出,随着输出转速的增加,输出力矩在不断地减小。在该参数条件下,当输出转速为0时,输出力矩为122 N·m;当输出转速增加到600 r/min时,输出力矩也随之减小到42 N·m。
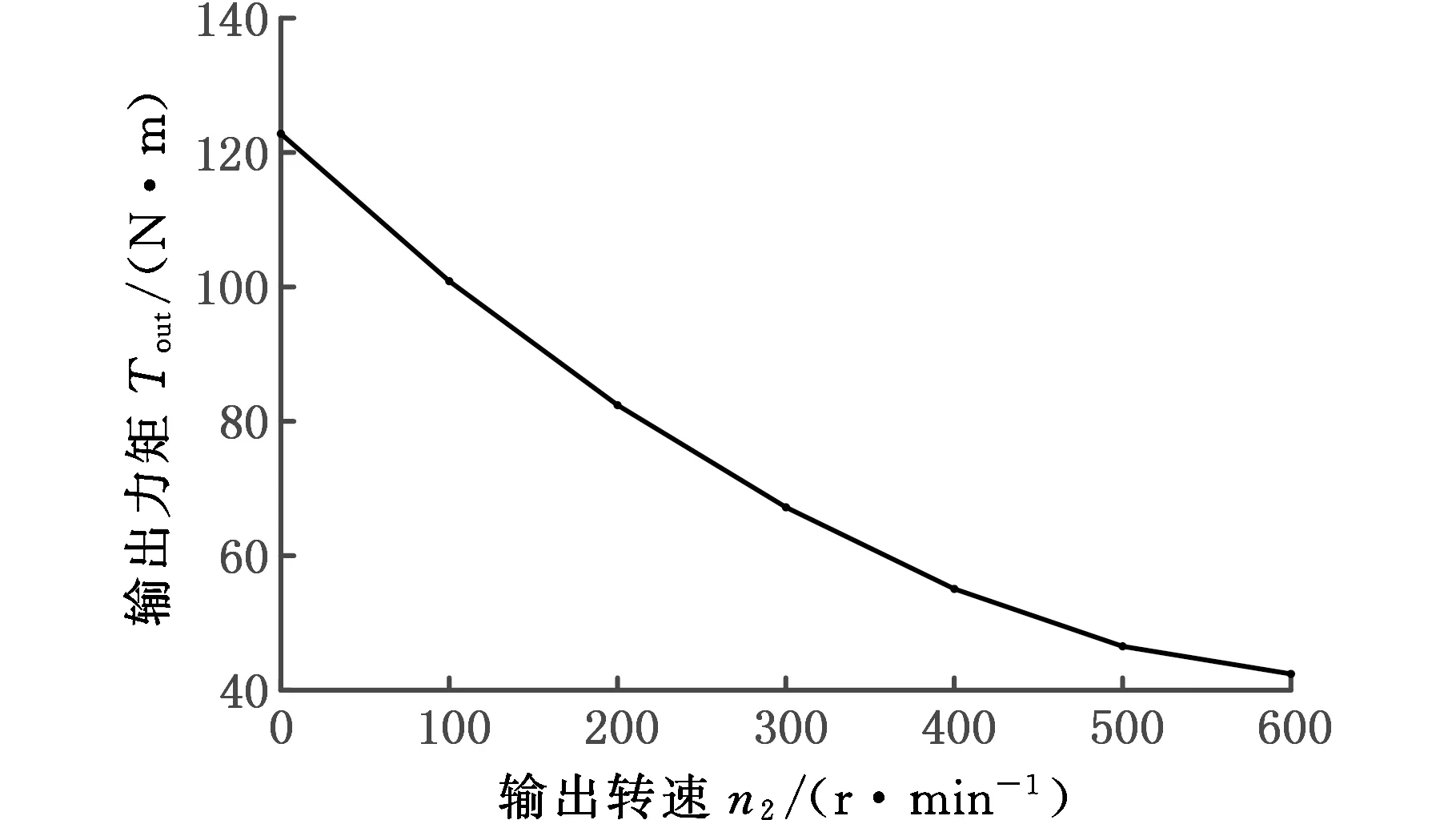
图9 摆线轨道离心传动转子基本工作特性曲线Fig.9 Basic working characteristic curve of cycloidorbit centrifugal drive rotor
3.3 椭圆+椭圆轨道
圆弧+椭圆曲线是指半圆和半椭圆的组合,如图10所示。与摆线轨道相似,椭圆曲线轨道部分是离心转子的实际作用部分,圆弧曲线轨道部分则实现离心转子的导向。下面分析这种结构下行星离心传动的基本工作特性。
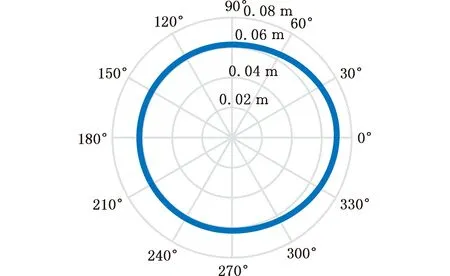
图10 圆弧+椭圆曲线示意图Fig.10 Schematic diagram of arc and elliptic curve
结合椭圆方程,可知离心转子工作区域的偏心距为
(13)
式中,a为椭圆长轴;b为椭圆短轴。
设定的主要设计参数如表3所示。与上文求解过程相同,可以得到行星离心传动的输出力矩随输出转速和输入转速的变化。
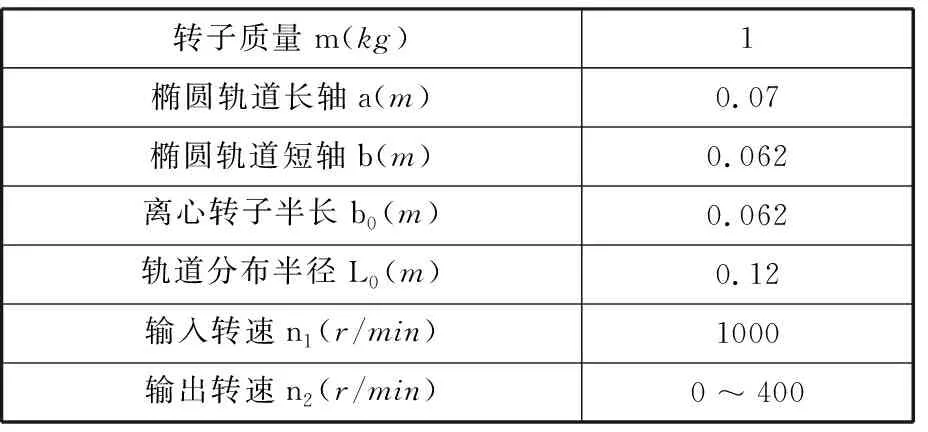
表3 圆弧+椭圆轨道的离心传动结构参数
由上述所求得的椭圆轨道输出力矩变化如图11所示。可以看出,在椭圆轨道曲线下,输出力矩同样出现了一定的周期性波动,变化情况与偏心圆轨道曲线的求解结果相似,但输出力矩的波峰值比偏心圆轨道曲线更大,在输出转速为0的工况下,输出力矩的峰值达到了95 N·m。
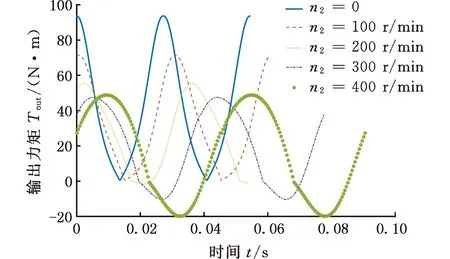
图11 椭圆轨道输出力矩变化Fig.11 Output characteristic curve of ellipticalcentrifugal transmission rotor
由上文可知,椭圆轨道传动规律和偏心圆轨道相似,为此进一步对输出力矩曲线求平均,可以获得类似于液力变矩器外特性曲线的行星离心传动基本输出特性曲线,如图12所示。可以看出,输出力矩随输出转速的增加而减小,且在设定的条件下,当输出转速为0时,机构的输出力矩为44 N·m;当输出转速为600 r/min时,输出力矩为14 N·m。

图12 椭圆轨道离心传动转子基本工作特性曲线Fig.12 Basic operating characteristic curve of ellipticalorbit centrifugal drive rotor
3.4 不同曲线轨道对比分析
对于不同曲线轨道而言,输出力矩都产生了一定的周期性波动,且输出力矩的峰值和平均值随着输出转速的增大在不断地减小。其中在圆弧部分结构尺寸一致的情况下,摆线曲线轨道输出的力矩约为椭圆曲线轨道的两倍,且摆线曲线轨道输出力矩的变化较椭圆轨道更加剧烈,其波峰的长度较短,在输出转速为0时,在8 ms的时间内输出力矩由0上升至310 N·m(图11),表明离心转子在工作时容易对轨道产生冲击,因此摆线轨道虽然输出力矩较大,但不宜作为行星离心式传动机构的轨道曲线类型。对于偏心圆曲线轨道和椭圆轨道曲线而言,两者输出特性相近,偏心圆结构更加简单,而椭圆轨道随着长轴和短轴的不同具有多种多样的形式,可以考虑对其进一步优化设计,进行进一步的试验。
4 行星离心式机械无级传动基本工作特性
4.1 多离心结构体单元工作时序组合特性
连续平稳传动的机械无级自动变速装置包含多个由行星轮驱动的外偏心、内导向的离心结构体,并且由于转子转动产生的力是周期变化的,故转子间要设置准确的工作相位和工作顺序,以保证机构输入输出平稳。由以上分析可以知道,单个离心结构体在工作时,输出力矩呈现波动状况,输出不稳定,需要多个离心结构体单元以不同的相位共同协调工作,以达到平稳输出的目的,如图13所示。
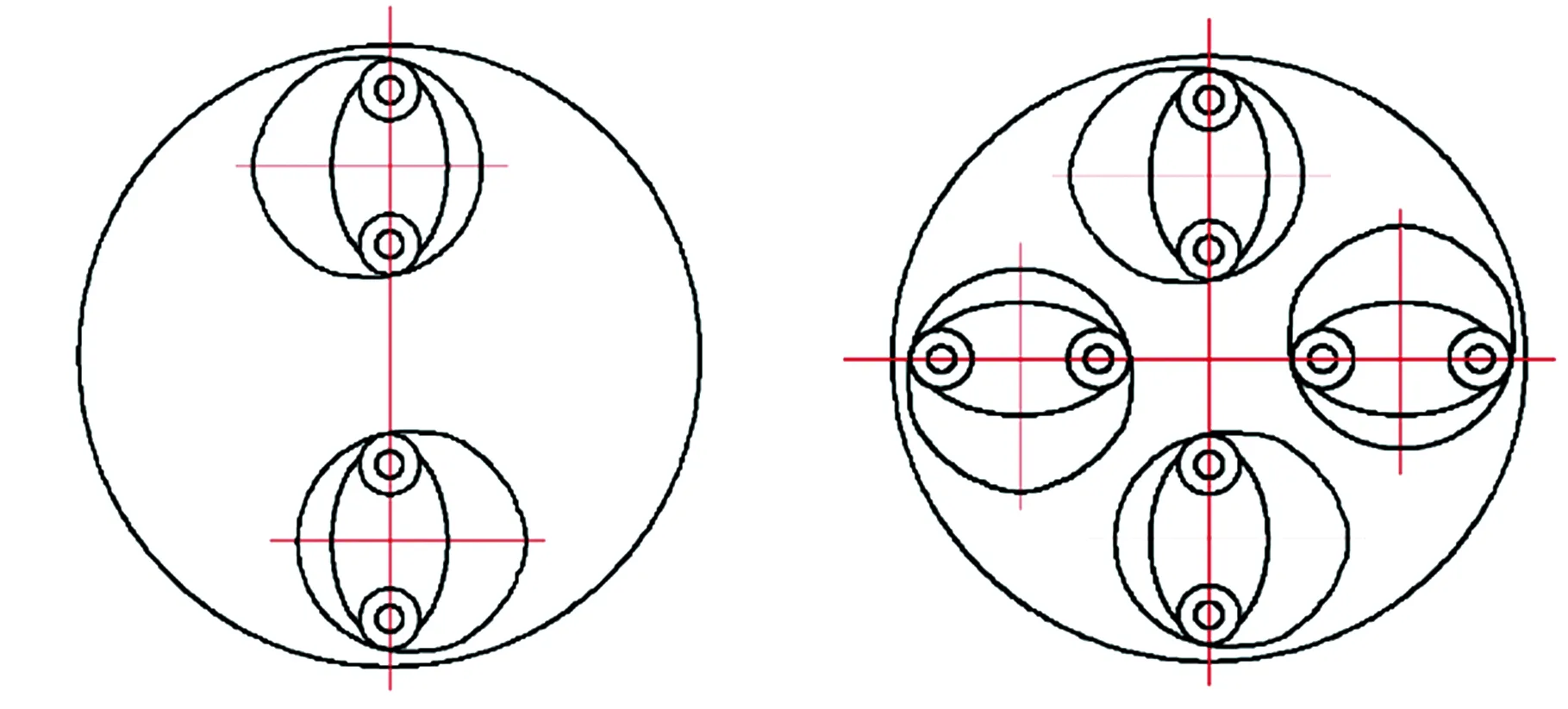
图13 多组离心结构体示意图Fig.13 Schematic diagram of multiple sets ofcentrifuge structures
为了较平稳地输出力矩,各组离心结构体单元相位差φ应该满足如下关系式:
(14)
式中,n为离心结构体的组数。
以4组离心结构体为例,结合上文偏心圆轨道单个离心结构体输出特性,设定输入转速为1000 r/min,输出转速为100 r/min,得到多组离心结构体的输出特性,如图14所示,图中显示,在4组离心结构体的组合下,组合输出力矩随时间的变化较单组离心结构体更加平稳,使传动装置能够稳定输出力矩。但同时力矩波动频率也随之增大,说明离心结构体的组数并不是越多越好,离心结构体的组数越多,系统产生的振动激励越大,因此在后续的设计过程中,我们会选择最优的组数以及其他的系统结构参数。

图14 组合结构体输出力矩Fig.14 Output torque of combined structure
4.2 行星离心式传动机构基本工作特性分析
基于上述逆动力学分析方法,以椭圆曲线轨道为例,通过对动力学模型输入不同的输入转速,得到一般的行星传动基本工作特性,如图15所示。由图可知,在一定条件下,随着输入转速的升高,输出力矩相应增大。而在输入转速一定的情况下,输出力矩随着输出转速的升高而减小,当输出转速增加到一定值时,此时输出转速继续增加,输出力矩有所上升,这是因为离心转子的运动是一个复杂的复合运动过程,包括公转速度和自转速度,如图2所示。传动机构的输出转速实际上就是离心转子的公转速度,随着机构输出转速的增加,离心转子由公转产生的离心力的影响逐渐大于由离心转子自转产生的离心力的影响,因此当输出转速增加到一定值后,影响输出力矩的主要因素由离心转子的自转速度变为了其公转速度,因此输出力矩会随着输出转速的增加而增加,符合行星离心式机械无级传动机构的工作原理,从而在理论上验证了行星离心式机械传动机构具有无级调速以及自适应输出力矩的特性。
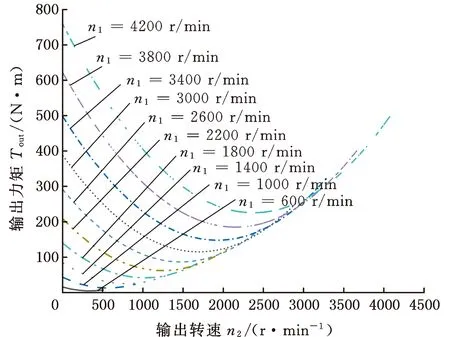
图15 行星离心式机械无级传动基本工作特性Fig.15 Basic working characteristics of planetarycentrifugal mechanical stepless transmission
与此同时,传动装置的输出特性必然与动力源的特性相关。需要说明的是,本文对行星离心式传动机构的特性分析是在假设满足发动机外特性曲线且忽略功率损失的条件下通过逆动力学的方法进行的,即行星离心式传动机构的输出力矩需要满足发动机输出功率的要求,在图16中,选取了三种动力源在一定输出转速下的最大输出功率,由图可知动力源1满足机构的输出条件,即满足本文对行星离心式传动机构特性分析的假设条件。

图16 动力源最大功率输出力矩Fig.16 Maximum power output torque of power source
5 结论
(1)基于行星传动结构提出了一种新型的机械无级传动装置,该装置具有结构简单、自适应性良好、功率密度大的特点。
(2)基于行星传动理论以及分析力学理论建立了该传动结构的动力学模型,得到了行星离心传动基本工作特性规律,验证了输出扭矩和转速可实现根据外力的自适应调节功能。
(3)提出了不同轨道类型的结构方案,并对其输出特性进行了对比分析,为进一步的结构优化设计提供了依据。
(4)当行星离心式传动机构工作时,随着输入转速的升高,输出力矩相应地增大。而在输入转速一定的情况下,输出力矩随着输出转速的升高而减小。且输入转速一定时,输出转速可以连续变化,具备自适应无级传动的基本特性,验证了行星离心式机械传动机构具有无级调速以及自适应输出力矩的特性。
猜你喜欢
青少年科技创新报(2024年25期)2024-10-14 00:00:00
防爆电机(2021年1期)2021-03-29 03:02:50
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
上海节能(2020年3期)2020-04-13 13:16:18
石油化工建设(2019年4期)2019-10-10 01:39:24
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
经济技术协作信息(2018年1期)2019-01-23 07:00:02
读者(2018年20期)2018-09-27 02:44:48
制造技术与机床(2017年3期)2017-06-23 08:11:51
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27